 Zhao Zhang
Zhao Zhang Yongliang Qiao
Yongliang Qiao Yangyang Guo1,3,4
Yangyang Guo1,3,4 Dongjian He
Dongjian He- 1College of Mechanical and Electronic Engineering, Northwest A&F University, Xianyang, China
- 2College of Electronic and Electrical Engineering, Baoji University of Arts and Sciences, Baoji, China
- 3Key Laboratory of Agricultural Internet of Things, Ministry of Agriculture and Rural Affairs, Northwest A&F University, Xianyang, China
- 4Shaanxi Key Laboratory of Agricultural Information Perception and Intelligent Service, Northwest A&F University, Xianyang, China
- 5Faculty of Engineering, Australian Centre for Field Robotics (ACFR), The University of Sydney, Sydney, NSW, Australia
Grape downy mildew (GDM) disease is a common plant leaf disease, and it causes serious damage to grape production, reducing yield and fruit quality. Traditional manual disease detection relies on farm experts and is often time-consuming. Computer vision technologies and artificial intelligence could provide automatic disease detection for real-time controlling the spread of disease on the grapevine in precision viticulture. To achieve the best trade-off between GDM detection accuracy and speed under natural environments, a deep learning based approach named YOLOv5-CA is proposed in this study. Here coordinate attention (CA) mechanism is integrated into YOLOv5, which highlights the downy mildew disease-related visual features to enhance the detection performance. A challenging GDM dataset was acquired in a vineyard under a nature scene (consisting of different illuminations, shadows, and backgrounds) to test the proposed approach. Experimental results show that the proposed YOLOv5-CA achieved a detection precision of 85.59%, a recall of 83.70%, and a mAP@0.5 of 89.55%, which is superior to the popular methods, including Faster R-CNN, YOLOv3, and YOLOv5. Furthermore, our proposed approach with inference occurring at 58.82 frames per second, could be deployed for the real-time disease control requirement. In addition, the proposed YOLOv5-CA based approach could effectively capture leaf disease related visual features resulting in higher GDE detection accuracy. Overall, this study provides a favorable deep learning based approach for the rapid and accurate diagnosis of grape leaf diseases in the field of automatic disease detection.
1. Introduction
Grape as an important fruit crop makes a large economic income contribution in many countries (Liu et al., 2020; Zhou et al., 2021). As the grape grows in a natural condition, diseases will often appear on the leaves due to the complex weather condition and changing surrounding environments. Grape downy mildew (GDM) is one of the serious diseases caused by the oomycete pathogen Plamopara viticola, which seriously affects the growth of the grapes, causes a decrease in quality and yield, and results in huge economic losses in the grape industry (Chen et al., 2020; Ji et al., 2020). Downy mildew often happened in wet and rainy areas in spring and summer, it is initiated at the stomata on the underside of the leaf, and then on the whole leaf (Chen et al., 2020). Monitoring grape leaf health and detecting pathogen are essential to reduce disease spread and facilitate effective management practices. Grape leaf diseases are currently controlled by repetitive fungicide treatments throughout the season. Reducing the treatment costs is a major challenge from both environmental and economic views. Timely detection and treatment at the initial stage of downy mildew infection (Adeel et al., 2019) is a good solution to control and cut down the spread of downy mildew in a large area. Therefore, if an automatic detection method can be achieved when the spots appear, the leaf disease control plan can be made to control the diseases, guarantee the grape plant health, and improve the quality and yield of the grapes. Vision based detection approaches have been developed to detect plant diseases, which is performed by extracting visual features (e.g., texture, shape, and color of leaf lesions) of leaf images and using models (e.g., support vector machine, linear regression) to recognize and detect the diseases (Tang et al., 2020; Hernández et al., 2021). Zhu et al. (2020) identified grape diseases using image analysis and BP neural networks. Chen et al. (2020) developed and compared several generalized linear models to predict the probability of high incidence and severity in the Bordeaux vineyard region. Abdelghafour et al. (2020) detected downy mildew symptoms using proximal color imaging and achieved 83% pixel-wise precision. However, the traditional image processing technology needs to manually extract the leaf disease characteristics, which is often time-consuming, and easy to miss the best disease prevention time. In addition, under the nature scene (e.g., different illumination, symptoms, camera viewpoints), classical algorithms or models lack robustness and cannot achieve stable detect performance.
Many scholars have proposed approaches for earlier plant disease detection and monitoring of the disease symptoms (Mutka and Bart, 2015). At the earlier stage, the human-crafted features such as texture, color, or shape characteristics are extracted from RGB or hyper-spectral plant leaf images for identifying the plant diseases (Mahlein, 2016). For example, Atanassova et al. (2019) proposed spectral data based classification models to predict the infection in plants, which achieved over 78% accuracy. Waghmare et al. (2016) proposed an automatic grape diseases detection system using the extracted color Local Binary Pattern (LBP) features. Mohammadpoor et al. (2020) proposed a support vector machine for grape fanleaf virus detection and achieved 98.6% average accuracy. However, this kind of method mostly depends on selected features and their extraction is easy to be influenced by the camera viewpoints, shadows, and lighting.
In recent years, deep learning methods such as convolutional neural networks (CNN) have been widely implemented in leaf disease detection, scene perception, and smart agriculture. Variates CNN based detection methods have been proposed for leaf disease recognition and monitoring (Liu et al., 2020). Ferentinos (2018) proposed convolutional neural network architectures to identify healthy or diseased plants. Arsenovic et al. (2019) developed a two-stage architecture of neural networks to classify plant disease and achieved an accuracy of 93.67%. Zhang et al. (2019a) proposed an AlexNet based cucumber disease identification approach, achieving 94.65% recognition accuracy. Ji et al. (2020) proposed CNN based approach to classify common grape leaf diseases and obtained average classification accuracy of 98.57%. Liu et al. (2020) proposed Inception convolutional neural network (DICNN) for identifying grape leaf diseases and realized an overall accuracy of 97.22% on single-leaf datasets. Thet et al. (2020) used an improved VGG16 model that achieved 98.4% classification accuracy for five different leaf diseases. Tang et al. (2020) classified grape disease types using lightweight convolution neural networks and channel-wise attention, which achieved 99.14% accuracy. Liu and Wang (2020) improved the YOLOv3 model to directly generate the bounding box coordinates for tomato diseases and pests detection, which achieved a detection accuracy of 92.39%. According to these studies, CNNs can learn advanced robust features of leaf diseases directly from original images, outperforming the traditional feature extraction approaches. Yu and Son (2020) proposed a leaf spot attention mechanism to increase apple leaf disease discriminative power and enhance the identification performance. Hernández and Lopez (2020) developed Bayesian deep learning techniques and an uncertainty probabilistic programming approach for plant disease detection.
With the continuous development of smart sensors, big data, and cloud computing, many automatic approaches have been proposed to identify and detect plant leaf diseases (Vishnoi et al., 2021). The rapid development of artificial intelligence and the Internet of Things (IoT) has significantly facilitated automatic disease detection (Zhang et al., 2020). Using deep learning models and noninvasive sensors to identify plant diseases has drawn more attention in the field of precision agriculture and plant phenotyping (Nagaraju and Chawla, 2020; Singh et al., 2020). Hernández et al. (2021) investigated hyperspectral sensing technologies and artificial intelligence applications for assessing downy mildew in grapevine under laboratory conditions. Gutiérrez et al. (2021) differentiated downy mildew and spider mite in grapevine under field conditions using the CNN model. Liu et al. (2021) proposed Hierarchical Multi-Scale Attention Semantic Segmentation (HMASS) to identify GDM infected regions, and the calculated infection severity percentage was highly correlated (R = 0.96) with the human field assessment.
Choi and Hsiao (2021) classified Cassava leaf diseases using the Residual Network. Zhang et al. (2021) developed a multi-feature fusion Faster R-CNN model and achieved 83.34% detection accuracy for soybean leaf disease. Dinata et al. (2021) proposed CNN based approach for 6 types of strawberry disease classification and achieved 63.7% accuracy. Abbas et al. (2021) detected tomato plant disease using transfer learning and C-GAN synthetic images, which achieved 99.51% accuracy. Cristin et al. (2020) proposed a deep neural network based Rider-Cuckoo Search Algorithm and achieved 87.7% plant disease detection accuracy. Roy and Bhaduri (2021) proposed deep learning-based multi-class plant disease and achieved 91.2% mean average precision. However, most of these methods are only tested in experimental situations, which need to be verified on the complex background situation.
Despite deep learning based approaches demonstrating its facilitate in GDM detection, the detection accuracy and speed restricted its application in autonomous viticulture management. Plant leaf disease detection in the real vineyard is facing many challenges, such as the small difference between the lesion area and the background, different scales of the spots, variation of symptoms, and camera viewpoints (Liu and Wang, 2021). Also, light changing in a real complex natural environment further increased the difficulty to achieve high detection accuracy. Therefore, real-time and accurate detection of grape downy mildew is of great significance for the scientific management and control of grape diseases in precision vineyard farming.
Recently, the attention mechanisms such as Squeeze-and-Excitation Networks (SE) (Hu et al., 2018), Convolutional block attention module (CBAM) (Woo et al., 2018), and CA (Hou et al., 2021) have been widely used to enhance the deep learning model performances. SE simply squeezes each 2D feature map to efficiently build interdependencies among channels (Hu et al., 2018). CBAM introduces spatial information encoding via convolutions with large-size kernels and gathers channel-wise and spatial-wise attention sequentially. The recently proposed CA adopts different spatial attention mechanisms and designs advanced attention blocks. Zhang et al. (2019b) applied an attention mechanism to object detection networks, enhancing the impact of significant features and weakening background interference. Experimental results show that the proposed approach achieved an object detection accuracy of 75.9% on PASCAL VOC 2007, which is 6% higher than Faster R-CNN. Liu et al. (2019) presented a deep neural network architecture based on information transmission and attention mechanisms. Zhao et al. (2021) diagnosed tomato leaf disease using an attention module improved network, which achieved 96.81% average identification accuracy on the tomato leaf diseases dataset. Ravi et al. (2021) integrated the attention module into the EfficientNet model to locate and identify the tiny infected regions in the Cassava leaf. The proposed method achieved better performance than non-attention-based CNN pre-trained models. Wang et al. (2021b) proposed a Fine-Grained grape leaf disease recognition method using a lightweight attention network, which can efficiently diagnose orchard grape leaf diseases with low computing cost. The above studies have demonstrated that attention mechanisms could enhance feature extraction ability for leaf disease detection and identification.
In this study, to improve GDM detection accuracy in the natural grape farm environment, we proposed YOLOv5-CA based GDM detection approach by combing YOLOv5 and CA mechanism. Different scales of image features were extracted through CNN layers of YOLOv5, and these features were weighted by CA for GDM detection. By using CA, the features' effectiveness for GDM detection is highlighted and those less effective features are suppressed. The proposed YOLOv5-CA based GDM detection is tested on our acquired grape leaf image dataset.
The remaining part of the article is organized as follows. Section 2 illustrates the used datasets, the proposed approaches, and evaluation indicators. Experimental results are presented in Section 3. Discussions of the performance are presented in Section 4. Finally, conclusions and future areas for research are given in Section 5.
2. Material and Methodology
2.1. Plant Material and Image Acquisition
Grape leaf image data were acquired in a commercial vineyard located in the college of Enology, Northwest A&F University, north of China (Yangling, Shaanxi Province). The vineyard manifested downy mildew (Plasmopara viticola) in many plants. Images were taken manually for several days (each day is from 8:00 a.m. to 16:00 p.m.) in early August on a partly cloudy day (Figure 1). The used camera is a Canon EDS 1200D (a field of view of approximately 504 mm horizontally and 360 mm vertically), and the external conditions for shooting are automatic mode. There is approximately 30 cm between the camera lens and the grape leaves.

Figure 1. Commercial vineyard and acquired images under natural light conditions.
A total of 820 leaf samples were collected from different lights, leaf overlapping, and disease severity. The dataset is challenging considering the complex background, occlusions, different disease spot-areas, and shadow influence. Figure 1 shows images of diseased leaves in a typical complex environment in the dataset. Downy mildew first appears as brown patches. These patches gradually spread and a leaf that is severely affected may have a reduced yield with a shorter lifetime and fruits with a small size.
To validate the proposed YOLOv5-CA based GDM detection approach, the randomly selected 500 leaf images were used as training datasets, while the remaining 320 images were used as testing data. For experiment testing, the LabelImg annotation tool (Tzutalin, 2015) was used to manually label the leaf disease areas.
2.2. YOLOv5-CA Based GDM Detection
In order to make YOLOv5 more suitable for GDM detection in complex natural scenarios such as complex background, occlusions, different disease spot-areas, and shadow influence, YOLOv5-CA based GDM detection approach is proposed to improve the GDM detection performance for real farming applications. Grape leaves' RGB images were acquired under field conditions from a commercial vineyard. These collected images contain healthy and downy mildew infected leaves. Then detection model YOLOv5-CA was trained to identify the GDM infected regions. As shown in Figure 2, the proposed YOLOv5-CA approach extracted features using YOLOv5 and learned key features through CA, enhancing the feature extraction ability and improving the leaf disease detection performance. As YOLOv5 could adjust the width and depth of the backbone network according to application requirements, for GDM detection, moderate model parameters (i.e., width and depth parameters are 0.75 and 0.67, respectively) were used to achieve reasonable detection speed.
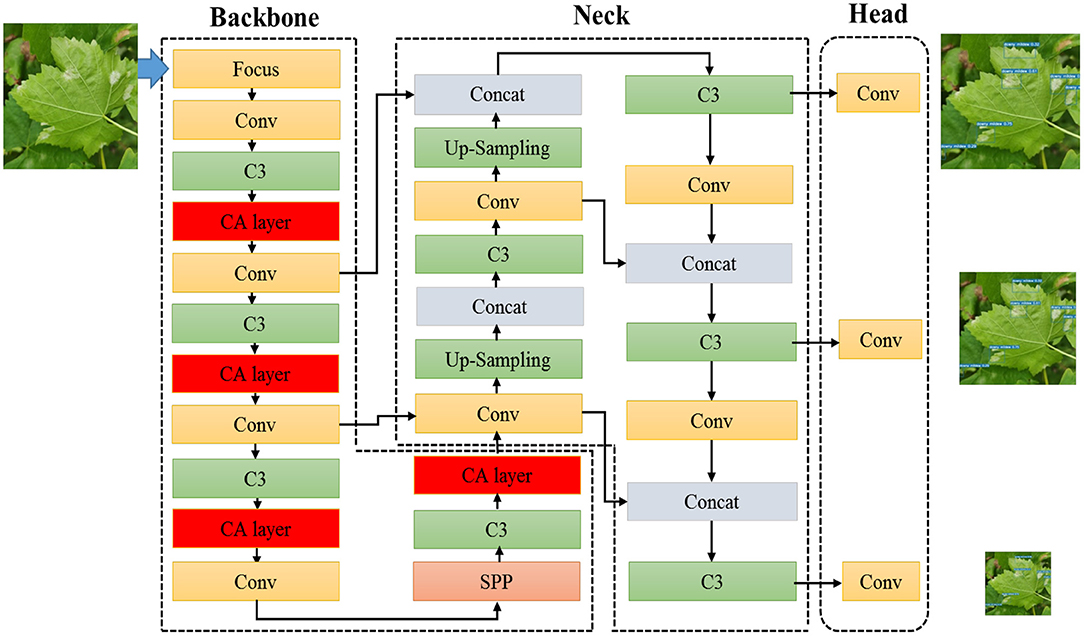
Figure 2. The architecture of the proposed YOLOv5-CA based GDM detection.
YOLOv5-CA network is mainly composed of backbone part, neck network, and head part: 1) The backbone of YOLOv5 is responsible for extracting image features, which includes several different layers types such as Focus, Conv, C3, CA, and Spatial Pyramid Pooling (SPP) layer. 2) The neck module generates a feature pyramid based on the PANet (Path Aggregation Network) (Liu et al., 2018). It is a series of feature aggregation layers of mixed and combined image features, enhancing the ability to detect objects with different scales by fusing low-level spatial features and high-level semantic features. 3) The head module generates detection boxes, indicating the category, coordinates, and confidence by applying anchor boxes to multi-scale feature maps from the neck module. The proposed YOLOv5-CA boosts the detection ability of different GDM infection regions through an attention mechanism, which provides a feasible GDM detection and monitoring solution for automatic disease control.
2.2.1. Backbone of YOLOv5-CA
The backbone of the YOLOV5-CA object detector mainly contains Focus, Conv, C3, CA, and Spatial Pyramid Pooling (SPP) layer. The features from deeper layers are more abstract and semantic, while the low-layer features contain spatial information and fine-grained features. For an input image, the Focus module rearranged it through stridden slice operations in both width and height dimensions, which reduces model calculation time. C3 module contains three convolutions and is used to extract the deep features of the image. The following SPP is used to improve the receptive field of the network by converting any size of the feature map into a fixed-size feature vector. SPP (He et al., 2015) concatenates layer outputs with different kernel sizes (e.g., 13 × 13, 9 × 9, 5 × 5) to boost multi-scale image feature representation ability. All the convolutions utilize Swish activation:
where σ denotes the sigmoid function.
In our study, we integrated the CA layer into the YOLOv5 backbone, CA layer factorizes channel attention into two 1D feature encoding processes and preserves the precise positional information, which augments the representations of the leaf disease regions.
2.2.2. Neck of YOLOv5-CA
The neck structure used in YOLOv5-CA is a PANet (Liu et al., 2018), which fuses the information of all layers to aggregate features by combing bottom-up pyramid and element-wise max operations. PANet combines convolution features of different layers for images, thus the useful information in each feature layer can be directly propagated to the following subnetwork. By this, PANet can not only realize the abstract description of large objects but also retains the feature details of small objects. In addition, C3 modules are also added at this stage to enhance the feature fusion capability. Through the neck part, the features of infected areas can be extracted to maintain the detection performance.
2.2.3. CA Layer
In terms of GDM detection, because the GDM is randomly distributed in the grape leaf, there is inevitably a mix of overlapping occlusion, and the GDM infection regions account for a relatively small percentage of the images, resulting in missed and mis-detected. In our study, a plug-and-play CA layer was introduced to assist YOLOv5 focused on key disease-related features, and improve the detection accuracy.
The CA layer embeds the location-aware information into the channel attention simultaneously, which increases the spatial range of attention and avoids a lot of computational overhead (Hou et al., 2021). CA layer can be regarded as a computational unit that enhances the representation ability of the learned features. For any intermediate feature , CA could outputs a transformed feature with augmented representations Y = [y1, y2, ⋯ , yc] of the same size to X.
As shown in Figure 3, the CA mechanism can be divided into two parts: the coordinate information embedding part (encodes the information of the channels in the horizontal and vertical coordinates) and the coordinate attention generation part (captures the positional information and generates the weight values).
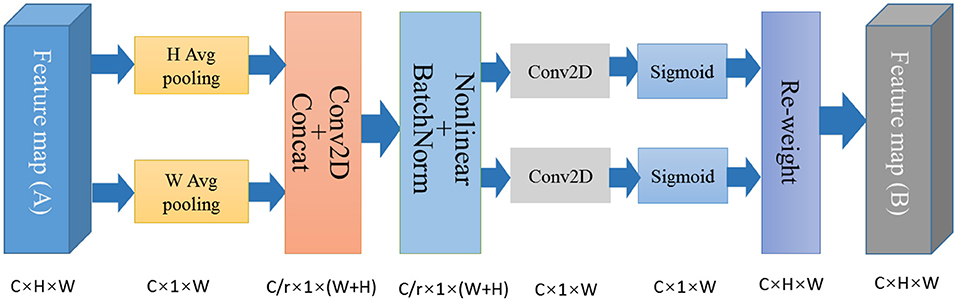
Figure 3. Schematic of coordinate attention module.
2.2.4. Coordinate Information Embedding
Attention mechanisms have been demonstrated helpful to enhance the overall performance of deep learning models (Chorowski et al., 2015). The attention mechanism can be regarded as a feature weighting scheme, which helps the deep learning model to pay more attention to the task-related information, and suppress or ignore the less-contribution features (Li et al., 2020; Mi et al., 2020). Through this, the attention mechanism strengthens the deep learning model's learning ability and boosts performance (Niu et al., 2021). In recent years, attention mechanisms based on deep learning networks have been applied to a wide variety of computer vision tasks such as image classification, object detection, and image segmentation (Qiao et al., 2019, 2021). Wang et al. (2021a) developed a deep attention module for vegetable and fruit leaf plant disease detection. Kerkech et al. (2020) used a fully convolutional neural network approach to classify Unmanned Aerial Vehicle (UAV) image pixels for detecting mildew disease.
It is known that channel attention could increase the value of the important channel while punishing the non-significant channels, however, channel attention is difficult to preserve positional information (Zhang et al., 2018). To capture precise positional information, the global average pooling was factorized into the average pooling from two directions of each channel. Specifically, given the input X, two spatial extents of pooling kernels (H, 1) and (W, 1) were used to encode each channel along the horizontal coordinate and the vertical dimensions, respectively. The output of the c-th channel along height h and width w dimensions can be formulated as:
where zh and zw are the outputs of the transform at h direction width w, respectively; xc is the feature map at c-th channel; W and H are the width and height dimensions of the feature map separately.
The Equation (2) encodes each channel along with the horizontal and vertical coordinates, preserving the positional information of each channel of feature maps, which facilitates the network to locate the GDM-related visual features precisely.
2.2.5. Coordinate Attention Generation
To further exploit resulting expressive representations, a simple and effective coordinate attention generation was used as the second transformation. Here, the obtained feature maps from the coordinate information embedding stage were concatenated and then sent to a shared 1 × 1 convolution layer. The relevant process is defined as:
where [, ] indicates concatenate operation, F is 1 × 1 convolution operation; is the output feature map of the ReLU layer, r is reduction rate.
Next, the feature map f was decomposed into two separate tensors: and . Then the following two 1 × 1 convolution layers for fh and fw, respectively, are recovered to the same shape as zh and zw. The operation is formulated as:
where σ is the sigmoid activation function, and Fh and Fw are the convolution manipulation for fh and fω separately.
The obtained feature maps gh and gw are then expanded and used as attention weights for the horizontal and vertical coordinates, respectively. This operation can enhance the effective leaf disease related features and reduce the influence of less important information. The reweighing process of the original input feature map can be defined as:
where yc is the c-th channel in the generated feature map y of the attention block.
2.3. YOLOv5-CA Model Training for GDM Detection
2.3.1. Network Training Parameters
In our study, the experimental platform is based on a computer equipped with an NVIDIA RTX 1080Ti GPU, Ryzen 7 3600 CPU@3.6 GHz. The proposed GDM detection approach was implemented using Pytorch.
In addition, to verify the effectiveness of the YOLOv5-CA based GDM detection approach, Faster R-CNN (Ren et al., 2015), YOLOv4 (Bochkovskiy et al., 2020), and YOLOv5 (Tzutalin, 2015) were also used for comparison. Faster R-CNN generates regions of interest (RoIs) candidates and then classifies them into objects (and background) and refines the boundaries of those regions. YOLOv4 and YOLOv5 are the two widely used detection methods from the YOLO series (Redmon et al., 2016).
For network training, the network's input size was set to 416 × 416 × 3, the training epoch was set to 1000, batch size was set to 16, and the learning rate was 0.0013. The momentum factor (momentum) was set to 0.937, the initial learning rate was 1 × 10−5 and the decay rate of weight was set to 0.001. The other parameters of each network are their default settings. In the training process, the network predicts the bounding box based on the initial anchor box. The gap between the prediction and ground truth was calculated to update the network in reverse and adjusts the network parameters. After training, the weight file of the detection model obtained was saved.
2.3.2. Network Loss Function
YOLOV5-CA automatically updates the best bounding box for GDM detection during the training process. The default optimization method of the model is the gradient descent method. The loss function Lloss used in YOLOv5-CA includes bounding box location loss LCiou, confidence loss Lconf and classification loss Lcls:
Classification loss Lcls computes the loss of class probability using Cross Entropy:
where is used to judge whether there is an object center. is the probability of class c; pi(c) is the probability of predicted box that belongs to class c.
Confidence loss Lconf penalizes object confidence error if that predictor is responsible for the ground truth box, which is computed using mean squared error:
where λnoobj represents the weight of the classification error, S is the number of grids, and B is the number of prior boxes in each grid; Ci is the confidence of the predicted box; Ĉi is the confidence of the ground-truth (Ĉi is always 1).
The LCiou computes the loss related to the predicted bounding box and ground truth, it can be defined as follows:
where v represents the coincidence degree of the two frame aspect ratios, b and bgt are the center coordinates of the prediction box and the real box respectively; ρ is the Euclidean distance between the two center points, and e represents the diagonal distance of the smallest closed area containing both the prediction and real boxes. IoU means the ratio of the intersection and union of the prediction bounding box and the actual bounding box.
2.3.3. Performance Evaluation
The used performance evaluation indicators for GDM detection include precision, recall, F1-score, mAP (mean average precision), and FPS (frame per second). Precision shows the ability of the model to accurately identify targets; recall reflects the ability of the model to detect targets; the F1-score is a harmonic mean of the precision and recall; FPS is the average inference speed. The F1-score is the reconciled mean of precision and recall, taking into account both the precision and recall of the classification model. Based on tp (the number of hlcorrectly detected downy mildew areas), fp (the number of incorrectly detected downy mildew areas), and fn (the number of disease regions that are incorrectly identified as background), the relevant calculation equations are as follows:
From the values of precision and recall, a precision-recall curve can be plotted to observe their distribution. The value of AP is the area under the precision-recall curve, and a larger value means better model performance. mAP@0.5 is the average value of precision under different recall values when the intersection over union (IoU) is 0.5. The calculation of mAP is as follows:
where N denotes the number of disease types (N is 1 in our study).
3. Experimental Results
3.1. Comparison of Different Object Detection Algorithms
There are varieties of deep learning based detection methods, in order to verify the effectiveness of the proposed method for GDM detection, three popular detection algorithms—Faster R-CNN, YOLOv4, and YOLOv5 were compared. The GDM detection results were presented in Table 1.
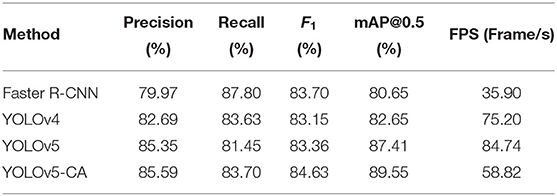
Table 1. Comparison of different GDM methods.
In Table 1, the proposed YOLOv5-CA based approach achieved 85.59% precision, 83.70% recall and 84.63% F1, and 89.55% mAP, respectively. Compared with the other methods, the proposed YOLOv5-CA GDM detection method is better than that of Faster R-CNN (80.65% mAP), YOLOv4 (82.65 % mAP), and YOLOv5 (87.41% mAP). From these results, it is clear that the CA mechanism of YOLOv5-CA improves the feature representation ability, enhancing the final detection accuracy for identifying the leaf disease areas. Meanwhile, the proposed approach could detect the GDM with a speed of 58.82 frames per second. These results illustrated that the proposed method could achieve high precision with a fast speed to meet real-time requirements, which is favorable for the deployment of the GDM detection model in spraying robots for the plant diseases control in smart vineyard farming.
3.2. Qualitative GDM Detection Comparison
Figure 4 demonstrates the comparison of different methods' qualitative results on our acquired grape leaf dataset. It can be seen that the proposed YOLOv5-CA could detect GDM at different leaf parts (e.g., leaf edge, the leaf central parts). Especially, the proposed YOLOv5-CA method could detect less obvious GDM lesions on the leaves, which outperformed the other methods such as Faster R-CNN, YOLOv4, and YOLOv5. The main reason could be that the CA mechanism strengthens the feature representation ability, which enhances the GDM detection performance.
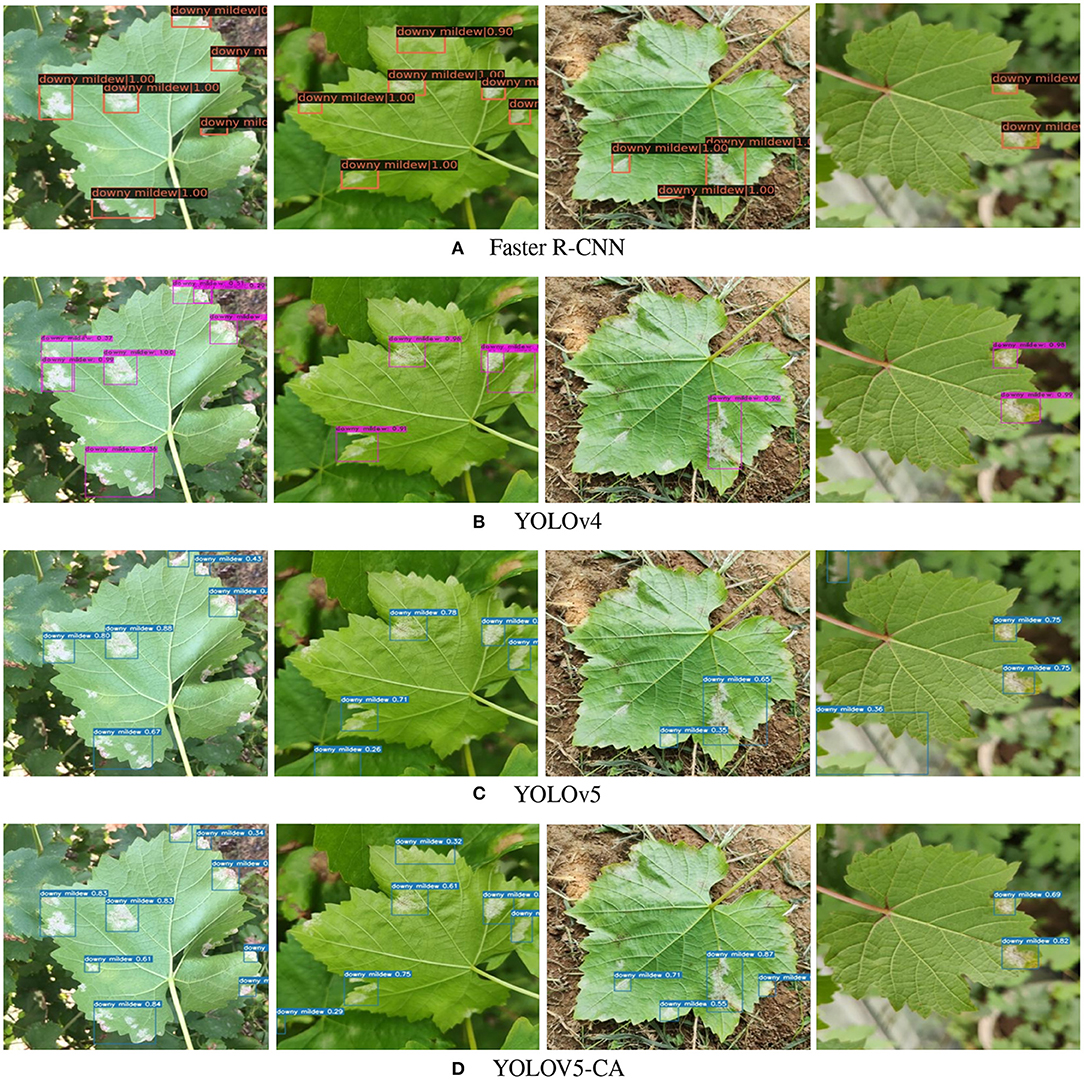
Figure 4. Examples of different GDM detection attention methods. (A) Faster R-CNN, (B) YOLOv4, (C) YOLOv5, and (D) YOLOV5-CA.
Additionally, more examples of YOLOv5-CA based GDM detection are presented in Figure 5. It can be seen that the GDM infected regions are well detected (blue bounding box) under complex background, especially, YOLOv5-CA could well detect the GDM regions nearby the leaf edge and petioles. It also can be noted that the YOLOv5-CA could detect both large and small GDM regions. The main reason is that the YOLOv5-CA makes the network pay more attention to the GDM-related visual features, reducing the false or mis-detection cases. The good detection performance of YOLOv5-CA provides valuable information for automatic disease control.
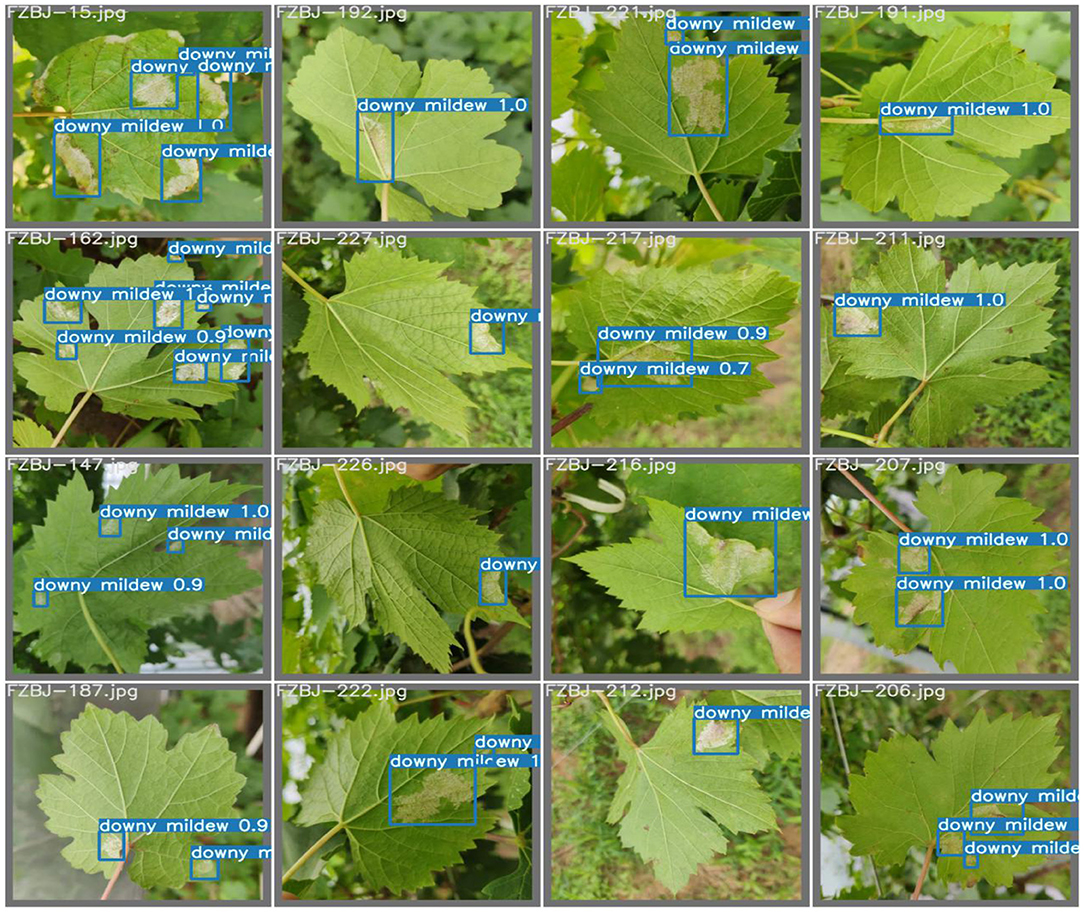
Figure 5. Examples of YOLOv5-CA based GDM detection results.
3.3. Influence of Different Network Input-Sizes on GDM Detection
The network input size is one factor that would influence the GDM detection performance. Here, we also investigate different input-sizes' influence on YOLOv5-CA based GDM detection. In Table 2, five typical network input sizes, namely, 112 ×112, 224 ×224, 320 ×320, 416 ×416, and 512 ×512 were compared in terms of GDM detection performance.
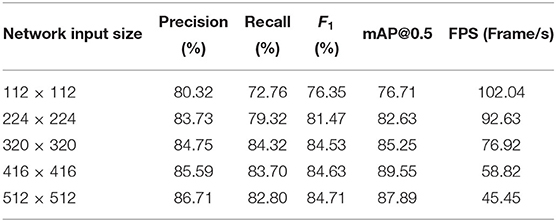
Table 2. Grape downy mildew Detection performance with different network input sizes.
According to Table 2, the network input with 416 ×416 size achieved 85.59% precision, 83.70% recall, 84.63% F1-score, and 89.55% mAP@0.5, which outperformed the performance of input size with 112 ×112, 224 ×224, and 512 ×512. This means the proposed YOLOv5-CA could extract and learn the more useful information from the large input size. However, when the network input-size increases to 512 ×512, there is not much performance improvement but significantly increased the processing time and calculating memory size, which is not favorable for fast detection and real applications. By balancing the speed and accuracy, the input size of 416 ×416 was selected in our work for real-time GDM detection.
3.4. Data Augmentation for YOLOv5-CA Detection
Offline data augmentation could increase the dataset diversity, explore the network hyperparameters, and finally enhance the accuracy and robustness of the trained model (Zoph et al., 2020; Su et al., 2021). To further improve the GDM detection performance, in our study, bounding box based data augmentation was used. The augmentation technique was only applied to disease areas within the manually labeled bounding boxes. The transformations for data augmentation implemented include: flipping horizontally and vertically, randomly cropping between 0 and 20% of the bounding box, random rotation, random shear of between −15° to +15° horizontally and vertically, random brightness adjustment (between 0 and +10%), and Gaussian blur (between 0 and 5 pixels). The original 500 training images were expanded to 2000 images, and then they were used to train the YOLOv5-CA network, which forces neural nets to optimize hyperparameters and generate a high-robust model. Some augmented bounding boxes on grape leaves can be seen in Figure 6.
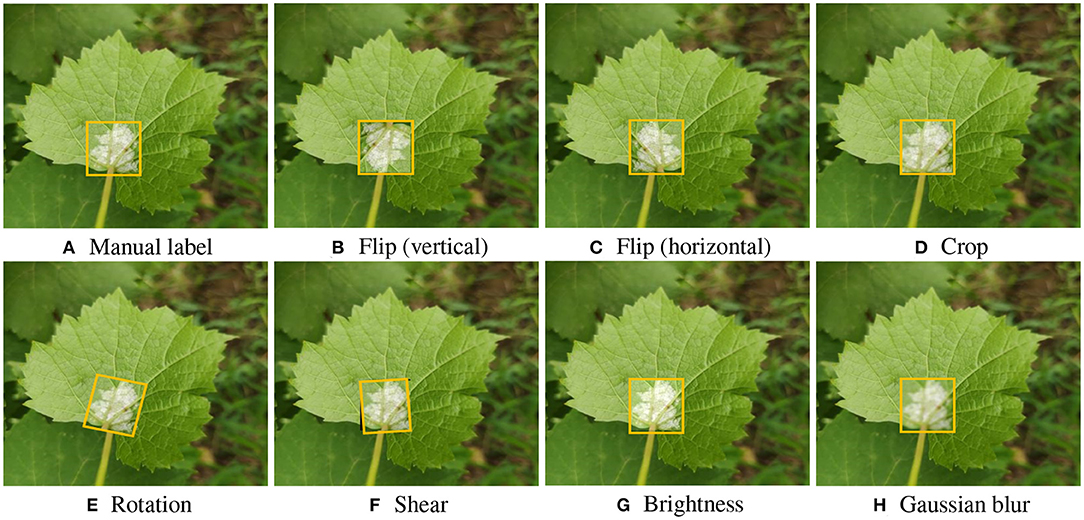
Figure 6. Examples of Bounding box based data augmentation. (A) Manual label, (B) Flip (vertical), (C) Flip (horizontal), (D) Crop, (E) Rotation, (F) Shear, (G) Brightness, and (H) Gaussian blur.
As illustrated in Table 3, the data augmentation based YOLOv5-CA detection achieved a precision of 88.82%, a recall of 83.63%, and an F1-score of 86.15%, which is slightly higher than those without data augmentation. The data augmentation positively influences the model's performance by increasing the size of the dataset and mitigating the over-fitting. The overall improvements demonstrated that the data augmentation module is helpful in the GDM detection, enlarging model learning ability and significantly improving detection performance.
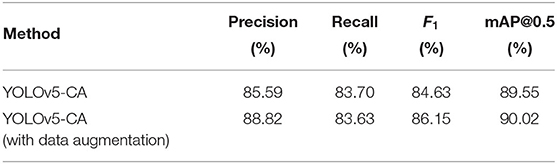
Table 3. Comparison of different GDM methods.
4. Discussions
This study presents a deep learning-based pipeline for automatic GDM detection in the vineyard. The grape leaf images acquired directly from the plants under field conditions were used to verify our proposed YOLOv5-CA approach. According to our experimental results presented in Table 1, a precision of 85.59%, a recall of 83.70%, an F1-score of 84.63%, and a mAP@0.5 of 89.55% with the inference speed of 58.82 frames per second (FPS) was obtained for GDM detection. The detection accuracy of the proposed YOLOv5-CA is superior to that of state-of-the-art methods such as Faster R-CNN, YOLOv4, and YOLOv5. This high accuracy demonstrates the effectiveness of YOLOv5-CA for GDM detection of grapevine leaf images taken under field conditions. There yield results show that it is feasible to model visual symptoms for automatic GDM detection using a combination of the YOLOv5 and the CA mechanism. The proposed YOLOv5-CA automatically finds complex features capable of differentiating leaves with downy mildew symptoms and without any, which provides a precise and effective method for automatic disease detection.
On the other hand, the results presented in Table 2 reveal the appropriate network input size in our experiments is 416 ×416. Additionally, Table 3 compared the GDM detection performance with and without data augmentation, it shows that data augmentation enhances the GDM detection performance. The possible reason is that data augmentation increases the size of the dataset and brings more diversity to leverage the model training.
Although this study mainly focuses on GDM detection, it is suitable for multi-diseases detection (e.g., black spot, powdery mildew) after the model was re-trained with the dataset containing these diseases. As our approach uses RGB images, it would be a restriction for detecting GDM in the very earlier stage (i.e., non-visible symptoms) detection. However, if the multi-spectral images were acquired and used, our proposed YOLOv5-CA could be a potential tool to distinguish downy mildew from other leaf diseases/damage.
5. Conclusions and Future Study
To achieve an accurate and real-time intelligent detection of GDM under natural environments, an automatic YOLOv5-CA based detection method was proposed in this study. By combing YOLOv5 and coordinate attention, the GDM related visual features are well focused on and extracted, which boosts the GDM detection performance. Our proposed YOLOv5-CA achieved 85.59% detection precision, 89.55% mAP@0.5 with 58.82 FPS, which outperformed Faster R-CNN, YOLOv4, and YOLOv5. Moreover, the test results showed that the different disease levels of GDM and the illumination influence would not have a great impact on the GDM detection results, indicating the proposed method is feasible for the rapid and accurate detection of GDM. Ablation studies show that a network input size of 416 ×416 is favorable for fast GDM detection, and bounding box-based data augmentation boosts the GDM detection precision by 3.23%. The results exposed in this work indicate that downy mildew in grapevine can be automatically evaluated using artificial intelligence technology.
Overall, our approach achieved a good trade-off between speed and accuracy for GDM, and can be adapted to applications with autonomous-based smart farming. For future study, the multi-spectral information and edge computing will be exploited to further improve detection performance and computational efficiency.
Data Availability Statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding authors.
Author Contributions
ZZ: investigation, methodology, writing-review, and editing. YQ: data curation, methodology, formal analysis, and writing-original draft. YG: writing-review and editing. DH: resources and article revising. All authors contributed to the article and approved the submitted version.
Funding
This research was funded by the National Key Research and Development Program of China (2019YFD1002500), Ningxia Hui Autonomous Region Key Research and Development Program (2021BEF02015), and Ningxia Hui Autonomous Region Flexible Introduction Team Project (2020RXTDLX08).
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher's Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abbas, A., Jain, S., Gour, M., and Vankudothu, S. (2021). Tomato plant disease detection using transfer learning with c-gan synthetic images. Comput. Electron. Agric. 187, 1106279. doi: 10.1016/j.compag.2021.106279
Abdelghafour, F., Keresztes, B., Germain, C., and Da Costa, J.-P. (2020). In field detection of downy mildew symptoms with proximal colour imaging. Sensors 20, 4380. doi: 10.3390/s20164380
Adeel, A., Khan, M. A., Sharif, M., Azam, F., Shah, J. H., Umer, T., et al. (2019). Diagnosis and recognition of grape leaf diseases: An automated system based on a novel saliency approach and canonical correlation analysis based multiple features fusion. Sustainable Comput. 24, 1100349. doi: 10.1016/j.suscom.2019.08.002
Arsenovic, M., Karanovic, M., Sladojevic, S., Anderla, A., and Stefanovic, D. (2019). Solving current limitations of deep learning based approaches for plant disease detection. Symmetry 11, 939. doi: 10.3390/sym11070939
Atanassova, S., Nikolov, P., Valchev, N., Masheva, S., and Yorgov, D. (2019). Early detection of powdery mildew (podosphaera xanthii) on cucumber leaves based on visible and near-infrared spectroscopy. AIP Conf. Proc. 2075, 160014. doi: 10.1063/1.5091341
Bochkovskiy, A., Wang, C.-Y., and Liao, H.-Y. M. (2020). Yolov4: optimal speed and accuracy of object detection. arXiv preprint arXiv:2004.10934. doi: 10.48550/arXiv.2004.10934
Chen, M., Brun, F., Raynal, M., and Makowski, D. (2020). Forecasting severe grape downy mildew attacks using machine learning. PLoS ONE 15, e0230254. doi: 10.1371/journal.pone.0230254
Choi, H. C., and Hsiao, T.-C. (2021). “Image classification of cassava leaf disease based on residual network,” in 2021 IEEE 3rd Eurasia Conference on Biomedical Engineering, Healthcare and Sustainability (ECBIOS) (Tainan: IEEE), 185–186.
Chorowski, J., Bahdanau, D., Serdyuk, D., Cho, K., and Bengio, Y. (2015). Attention-based models for speech recognition. arXiv preprint arXiv:1506.07503. doi: 10.48550/arXiv.1506.07503
Cristin, R., Kumar, B. S., Priya, C., and Karthick, K. (2020). Deep neural network based rider-cuckoo search algorithm for plant disease detection. Artif. Intell. Rev. 53, 4993–5018. doi: 10.1007/s10462-020-09813-w
Dinata, M. I., Nugroho, S. M. S., and Rachmadi, R. F. (2021). “Classification of strawberry plant diseases with leaf image using CNN,” in 2021 International Conference on Artificial Intelligence and Computer Science Technology (ICAICST) (Yogyakarta: IEEE), 68–72.
Ferentinos, K. P.. (2018). Deep learning models for plant disease detection and diagnosis. Comput. Electron. Agric. 145, 3111–3318. doi: 10.1016/j.compag.2018.01.009
Gutiérrez, S., Hernández, I., Ceballos, S., Barrio, I., Díez-Navajas, A. M., and Tardaguila, J. (2021). Deep learning for the differentiation of downy mildew and spider mite in grapevine under field conditions. Comput. Electron. Agric. 182, 1105991. doi: 10.1016/j.compag.2021.105991
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 37, 1904–1916. doi: 10.1109/TPAMI.2015.2389824
Hernández, I., Gutiérrez, S., Ceballos, S., Iñíguez, R., Barrio, I., and Tardaguila, J. (2021). Artificial intelligence and novel sensing technologies for assessing downy mildew in grapevine. Horticulturae 7, 103. doi: 10.3390/horticulturae7050103
Hernández, S., and Lopez, J. L. (2020). Uncertainty quantification for plant disease detection using bayesian deep learning. Appl. Soft. Comput. 96, 1106597. doi: 10.1016/j.asoc.2020.106597
Hou, Q., Zhou, D., and Feng, J. (2021). “Coordinate attention for efficient mobile network design,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (Nashville, TN: IEEE), 13713–13722.
Hu, J., Shen, L., and Sun, G. (2018). “Squeeze-and-excitation networks,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (Salt Lake City, UT: IEEE), 7132–7141.
Ji, M., Zhang, L., and Wu, Q. (2020). Automatic grape leaf diseases identification via unitedmodel based on multiple convolutional neural networks. Inf. Process. Agric. 7, 418–426. doi: 10.1016/j.inpa.2019.10.003
Kerkech, M., Hafiane, A., and Canals, R. (2020). Vine disease detection in uav multispectral images using optimized image registration and deep learning segmentation approach. Comput. Electron. Agric. 174, 1105446. doi: 10.1016/j.compag.2020.105446
Li, W., Liu, K., Zhang, L., and Cheng, F. (2020). Object detection based on an adaptive attention mechanism. Sci Rep. 10, 1–13. doi: 10.1038/s41598-020-67529-x
Liu, B., Ding, Z., Tian, L., He, D., Li, S., and Wang, H. (2020). Grape leaf disease identification using improved deep convolutional neural networks. Front. Plant. Sci. 11, 11082. doi: 10.3389/fpls.2020.01082
Liu, E., Gold, K. M., Combs, D., Cadle-Davidson, L., and Jiang, Y. (2021). “Deep learning-based autonomous downy mildew detection and severity estimation in vineyards,” in 2021 ASABE Annual International Virtual Meeting (American Society of Agricultural and Biological Engineers).
Liu, J., and Wang, X. (2020). Tomato diseases and pests detection based on improved yolo v3 convolutional neural network. Front. Plant Sci. 11, 8198. doi: 10.3389/fpls.2020.00898
Liu, J., and Wang, X. (2021). Plant diseases and pests detection based on deep learning: a review. Plant Methods 17, 1–18. doi: 10.1186/s13007-021-00722-9
Liu, R., Cheng, Z., Zhang, L., and Li, J. (2019). Remote sensing image change detection based on information transmission and attention mechanism. IEEE Access 7, 1156349–1156359. doi: 10.1109/ACCESS.2019.2947286
Liu, S., Qi, L., Qin, H., Shi, J., and Jia, J. (2018). “Path aggregation network for instance segmentation,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (Salt Lake City, UT: IEEE), 8759–8768.
Mahlein, A.-K.. (2016). Plant disease detection by imaging sensors-parallels and specific demands for precision agriculture and plant phenotyping. Plant Dis. 100, 241–251. doi: 10.1094/PDIS-03-15-0340-FE
Mi, Z., Zhang, X., Su, J., Han, D., and Su, B. (2020). Wheat stripe rust grading by deep learning with attention mechanism and images from mobile devices. Front. Plant Sci. 11, 558126. doi: 10.3389/fpls.2020.558126
Mohammadpoor, M., Nooghabi, M. G., and Ahmedi, Z. (2020). An intelligent technique for grape fanleaf virus detection. Int. J. Interact. Multim. Artif. Intell. 6, 62–67. doi: 10.9781/ijimai.2020.02.001
Mutka, A. M., and Bart, R. S. (2015). Image-based phenotyping of plant disease symptoms. Front. Plant Sci. 5, 7134. doi: 10.3389/fpls.2014.00734
Nagaraju, M., and Chawla, P. (2020). Systematic review of deep learning techniques in plant disease detection. Int. J. Syst Assurance Eng. Manag. 11, 547–560. doi: 10.1007/s13198-020-00972-1
Niu, Z., Zhong, G., and Yu, H. (2021). A review on the attention mechanism of deep learning. Neurocomputing 452, 418–462. doi: 10.1016/j.neucom.2021.03.091
Qiao, Y., Kong, H., Clark, C., Lomax, S., Su, D., Eiffert, S., et al. (2021). Intelligent perception-based cattle lameness detection and behaviour recognition: a review. Animals 11, 3033. doi: 10.3390/ani11113033
Qiao, Y., Truman, M., and Sukkarieh, S. (2019). Cattle segmentation and contour extraction based on mask r-cnn for precision livestock farming. Comput. Electron. Agric. 165, 1104958. doi: 10.1016/j.compag.2019.104958
Ravi, V., Acharya, V., and Pham, T. D. (2021). Attention deep learning-based large-scale learning classifier for cassava leaf disease classification. Expert. Syst. 39, e12862. doi: 10.1111/exsy.12862
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A. (2016). “You only look once: Unified, real-time object detection,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (Las Vegas, NV: IEEE), 779–788.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-CNN: towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 28, 911–999. doi: 10.48550/arXiv.1506.01497
Roy, A. M., and Bhaduri, J. (2021). A deep learning enabled multi-class plant disease detection model based on computer vision. AI 2, 413–428. doi: 10.3390/ai2030026
Singh, V., Sharma, N., and Singh, S. (2020). A review of imaging techniques for plant disease detection. Artif Intell Agric. 4, 229–242. doi: 10.1016/j.aiia.2020.10.002
Su, D., Kong, H., Qiao, Y., and Sukkarieh, S. (2021). Data augmentation for deep learning based semantic segmentation and crop-weed classification in agricultural robotics. Comput. Electron. Agric. 190, 1106418. doi: 10.1016/j.compag.2021.106418
Tang, Z., Yang, J., Li, Z., and Qi, F. (2020). Grape disease image classification based on lightweight convolution neural networks and channelwise attention. Comput. Electron. Agric. 178, 1105735. doi: 10.1016/j.compag.2020.105735
Thet, K. Z., Htwe, K. K., and Thein, M. M. (2020). “Grape leaf diseases classification using convolutional neural network,” in 2020 International Conference on Advanced Information Technologies (ICAIT) (Yangon: IEEE), 147–152.
Tzutalin (2015). Labelimg. git code (2015). Available online at: https://github.com/tzutalin/labelImg
Vishnoi, V. K., Kumar, K., and Kumar, B. (2021). Plant disease detection using computational intelligence and image processing. J. Plant Dis. Protect. 128, 19–53. doi: 10.1007/s41348-020-00368-0
Waghmare, H., Kokare, R., and Dandawate, Y. (2016). “Detection and classification of diseases of grape plant using opposite colour local binary pattern feature and machine learning for automated decision support system,” in 2016 3rd International Conference on Signal Processing and Integrated Networks (SPIN) (Noida: IEEE), 513–518.
Wang, J., Yang, J., Yu, L., Dong, H., Yun, K., and Wang, Y. (2021a). Dba_ssd: a novel end-to-end object detection using deep attention module for helping smart device with vegetable and fruit leaf plant disease detection. Information 12, 474. doi: 10.21203/rs.3.rs-166579/v1
Wang, P., Niu, T., Mao, Y., Liu, B., Yang, S., He, D., et al. (2021b). Fine-grained grape leaf diseases recognition method based on improved lightweight attention network. Front. Plant Sci. 12, 738042. doi: 10.3389/fpls.2021.738042
Woo, S., Park, J., Lee, J.-Y., and Kweon, I. S. (2018). “Cbam: convolutional block attention module,” in Proceedings of the European Conference on Computer Vision (ECCV) (Munich), 3–19.
Yu, H.-J., and Son, C.-H. (2020). “Leaf spot attention network for apple leaf disease identification,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (Seattle, WA: IEEE), 52–53.
Zhang, K., Wu, Q., and Chen, Y. (2021). Detecting soybean leaf disease from synthetic image using multi-feature fusion faster r-cnn. Comput. Electron. Agric. 183, 1106064. doi: 10.1016/j.compag.2021.106064
Zhang, N., Yang, G., Pan, Y., Yang, X., Chen, L., and Zhao, C. (2020). A review of advanced technologies and development for hyperspectral-based plant disease detection in the past three decades. Remote Sens. 12, 3188. doi: 10.3390/rs12193188
Zhang, S., Zhang, S., Zhang, C., Wang, X., and Shi, Y. (2019a). Cucumber leaf disease identification with global pooling dilated convolutional neural network. Comput. Electron. Agric. 162, 4122–4430. doi: 10.1016/j.compag.2019.03.012
Zhang, Y., Chen, Y., Huang, C., and Gao, M. (2019b). Object detection network based on feature fusion and attention mechanism. Future Internet 11, 9. doi: 10.3390/fi11010009
Zhang, Y., Li, K., Li, K., Wang, L., Zhong, B., and Fu, Y. (2018). “Image super-resolution using very deep residual channel attention networks,” in Proceedings of the European Conference on Computer Vision (ECCV) (Munich), 286–301.
Zhao, S., Peng, Y., Liu, J., and Wu, S. (2021). Tomato leaf disease diagnosis based on improved convolution neural network by attention module. Agriculture 11, 651. doi: 10.3390/agriculture11070651
Zhou, C., Zhang, Z., Zhou, S., Xing, J., Wu, Q., and Song, J. (2021). Grape leaf spot identification under limited samples by fine grained-gan. IEEE Access 9, 1100480–1100489. doi: 10.1109/ACCESS.2021.3097050
Zhu, J., Wu, A., Wang, X., and Zhang, H. (2020). Identification of grape diseases using image analysis and bp neural networks. Multimed Tools Appl. 79, 14539–14551. doi: 10.1007/s11042-018-7092-0
Keywords: grape downy mildew, disease detection, deep learning, attention mechanism, data augmentation, digital agriculture
Citation: Zhang Z, Qiao Y, Guo Y and He D (2022) Deep Learning Based Automatic Grape Downy Mildew Detection. Front. Plant Sci. 13:872107. doi: 10.3389/fpls.2022.872107
Received: 09 February 2022; Accepted: 27 April 2022;
Published: 09 June 2022.
Edited by:
Yiannis Ampatzidis, University of Florida, United StatesReviewed by:
Brun Francois, Association de Coordination Technique Agricole, FranceHarald Scherm, University of Georgia, United States
Copyright © 2022 Zhang, Qiao, Guo and He. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yongliang Qiao, eS5xaWFvQGFjZnIudXN5ZC5lZHUuYXU=; Dongjian He, aGRqMTY4QG53c3VhZi5lZHUuY24=