
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Plant Sci., 24 January 2022
Sec. Technical Advances in Plant Science
Volume 12 - 2021 | https://doi.org/10.3389/fpls.2021.816272
This article is part of the Research TopicComputer Vision in Plant Phenotyping and AgricultureView all 18 articles
 Fen Dai1,2,3,4
Fen Dai1,2,3,4 Fengcheng Wang1,2
Fengcheng Wang1,2 Dongzi Yang1,2
Dongzi Yang1,2 Shaoming Lin1,2Xin Chen1,2,3,4Yubin Lan1,2,3,4*Xiaoling Deng1,2,3,4*
Shaoming Lin1,2Xin Chen1,2,3,4Yubin Lan1,2,3,4*Xiaoling Deng1,2,3,4*
Citrus psyllid is the only insect vector of citrus Huanglongbing (HLB), which is the most destructive disease in the citrus industry. There is no effective treatment for HLB, so detecting citrus psyllids as soon as possible is the key prevention measure for citrus HLB. It is time-consuming and laborious to search for citrus psyllids through artificial patrol, which is inconvenient for the management of citrus orchards. With the development of artificial intelligence technology, a computer vision method instead of the artificial patrol can be adopted for orchard management to reduce the cost and time. The citrus psyllid is small in shape and gray in color, similar to the stem, stump, and withered part of the leaves, leading to difficulty for the traditional target detection algorithm to achieve a good recognition effect. In this work, in order to make the model have good generalization ability under outdoor light condition, a high-definition camera to collect data set of citrus psyllids and citrus fruit flies under natural light condition was used, a method to increase the number of small target pests in citrus based on semantic segmentation algorithm was proposed, and the cascade region-based convolution neural networks (R-CNN) (convolutional neural network) algorithm was improved to enhance the recognition effect of small target pests using multiscale training, combining CBAM attention mechanism with high-resolution feature retention network high-resoultion network (HRNet) as feature extraction network, adding sawtooth atrous spatial pyramid pooling (ASPP) structure to fully extract high-resolution features from different scales, and adding feature pyramid networks (FPN) structure for feature fusion at different scales. To mine difficult samples more deeply, an online hard sample mining strategy was adopted in the process of model sampling. The results show that the improved cascade R-CNN algorithm after training has an average recognition accuracy of 88.78% for citrus psyllids. Compared with VGG16, ResNet50, and other common networks, the improved small target recognition algorithm obtains the highest recognition performance. Experimental results also show that the improved cascade R-CNN algorithm not only performs well in citrus psylla identification but also in other small targets such as citrus fruit flies, which makes it possible and feasible to detect small target pests with a field high-definition camera.
The prevention and control of agricultural pests and diseases is a very serious problem in agriculture. Farmers usually need to spray a lot of pesticides to prevent pests and diseases in advance. If the field pests can be detected as early as possible, the pesticides can be accurately controlled and reduced. Citrus Huanglongbing (HLB) is one of the most serious diseases that endanger the development of the world’s citrus industry. It has caused a huge blow to the citrus industry in China, the United States, Brazil, Mexico, South Africa, and South Asia. The citrus psyllid is the only insect vector of citrus HLB, and it reproduces fast, has a strong ability to transmit the virus by sucking sap, and is difficult to identify because of its small size (average size of 2.5 mm), so early detecting of citrus psyllids and controlling their transmission are the key measures for prevention and control of HLB (Dala-Paula et al., 2019; Han et al., 2021; Ngugi et al., 2021). Citrus psyllids need an adapted host, mainly shoots, to survive (Gallinger and Gross, 2018). Traditional agricultural measures mainly kill citrus psyllids regularly with pesticides, which lead to the problems such as waste of agricultural materials and environmental and fruit pollution. There is 70–80% chance that citrus psyllids will transmit the HLB pathogen to healthy trees when they feed on the sap from the leaves of HLB trees and then fly to healthy trees. If farmers can detect citrus psyllids as soon as possible and spray pesticides accurately, the number of psyllids can be effectively reduced, the probability of psyllids sucking HLB diseased trees can be greatly reduced, and the transmission of HLB through psyllids can be effectively controlled. Therefore, through early detection and early control method, the population of citrus psyllids can be reduced, and the spread of HLB can be effectively prevented, thereby increasing the yield of citrus.
With the development of deep learning technology and the improvement of hardware equipment, the feasibility of image recognition of diseases and pests is constantly improving, more and more algorithms have been applied to the detection of plant diseases and pests (Ngugi et al., 2021). Accumulating evidence highlights the potential of employing CNNs in plant phenotyping settings. Their incorporation was proven to be very effective due to their capacity of distinguishing patterns and subtracting regularities from information under analysis. In plant sciences, there are many relevant and successful implementations including identification by examining seeds (chickpea; Taheri-Garavand et al., 2021a) or leaves (grapevine; Nasiri et al., 2021), tomato pest detection based on improved YOLOv3 (Liu and Wang, 2020, detection of mango anthracnose using neural networks (Singh et al., 2019), recognition of disease spots on soybean, citrus, and other plant leaves by deep learning (Arnal Barbedo, 2019), identification of rice-diseased leaves using transfer learning (Chen J. et al., 2020), classification and identification of agricultural pests in complex environments (Cheng et al., 2017), real-time detection of apple leaf diseases and insect pests (Jiang et al., 2019). These studies have shown that the neural network is successfully modeled under laboratory or field conditions with good recognition effect even under complex conditions, and transfer learning can also be performed according to different objects.
Convolutional neural network for image classification has become a standard structure to solve visual recognition problems, such as ResNet (He et al., 2016), VGGNet (Simonyan and Zisserman, 2014), GoogLeNet (Szegedy et al., 2014), and ResNetXt (Xie et al., 2016). The characteristic of these networks is that the learned representation gradually decreases in spatial resolution, which is not suitable for regional and pixel-level problems. The features learned through the above classification network essentially have low-resolution features. Therefore, the huge loss of resolution makes it difficult for the network to obtain accurate prediction results in tasks that are sensitive to spatial accuracy.
Target detection is constructed to solve the problems of classification and regression. At present, the target detection models based on deep learning are mainly divided into two categories: the two-stage method represented by faster region-based convolution neural networks (R-CNN) (Ren et al., 2017) and the one-stage method represented by Single Shot MultiBox Detector (SSD) (Liu et al., 2016). Although many different target detection algorithms have emerged, such as faster R-CNN (Ren et al., 2017), YOLO (Redmon et al., 2016), and other target detection algorithms, which achieve high recognition accuracy on conventional objects such as pedestrians and vehicles. However, the target of agricultural pests such as citrus psyllids is too small to be recognized by the above target detection algorithms. Chen et al. (2016) defined small targets with the characteristics of low-pixel occupancy in the whole picture, small candidate box, insufficient data sample, and so on. Because of these characteristics, the algorithms for small goals are still stuck in specific occasions, for example, building recognition in high altitude remote-sensing images (Xia et al., 2017), recognition of traffic lights in pictures (Behrendt et al., 2017), pedestrian recognition from the driver’s perspective (Zhang et al., 2017).
The citrus psyllid studied in this experiment has the characteristics of small size, gray color, and easily being mistaken as branches, stems, and dead leaves. The deeper the layers of the neural network are, the more information will be lost. Therefore, it is difficult to extract useful feature information from the network for small target citrus psyllids. The similarity in color makes it difficult to identify the target, which makes citrus psyllids often be considered as branches or dead leaves. Besides, the distribution of citrus psyllids is scattered, often concentrated in the bud, leaf back, and leaf veins, so each picture does not necessarily have a large number of psyllid samples. For images with fewer samples, the number of trainable positive sample boxes is greatly reduced, and it is not easy to train a model with superior performance. Cascade R-CNN (Cai and Vasconcelos, 2017) is a two-stage target detection model framework proposed in recent years, solving the IoU selection problem of the traditional target detection algorithm by cascading various detection models and having good detection performance for small targets. Therefore, to solve the problem of lack of citrus psyllids, a method of citrus psyllids enhancement based on semantic segmentation was explored, and the cascade R-CNN model for the small target recognition of citrus psyllids was improved in this study.
The main location for collecting the data in this study is the Citrus HLB Test Base of South China Agricultural University (Longitude: 113.35875, Latitude: 23.15747), in Guangdong Province, China. The data collected in this experiment mainly used RGB images (visible spectrum 400–700 nm). The collected instruments include a mobile phone (Huawei Mate 40, China) with high-definition cameras and a Sony camera (Sony, ILCE-6400, made in China), with 4,000 × 5,000 pixels. The shooting distance was controlled within the range of 50–100 cm, and the shooting angle and orientation were not fixed. The shooting was performed in the morning, noon, and afternoon on a sunny day and under normal lighting condition. The targets in the picture are mainly citrus psyllids (average size of 2.5 mm) and fruit flies (average size of 5 mm) which are the main pests in citrus orchards. Although the citrus fruit fly is larger than the citrus psyllid, it still has the characteristics of being small and difficult to detect. In this study, the data of citrus psyllids and citrus fruit flies were used for model training. The model is proved to be transplantable to other small target pests by adding citrus fruit flies to the training. The data were collected in the spring of March, April, and May, from different Rutaceae plants (Rutaceae Juss.) including Shatangju (Citrus reticulata Blanco), kumquat potted plant [Fortunella margarita (Lour.) Swingle], and Murraya exotica (Murraya exotica L.) potted plant. Finally, a total of 500 high-definition sample images were obtained. The expensive price experimental data are shown in Figure 1.
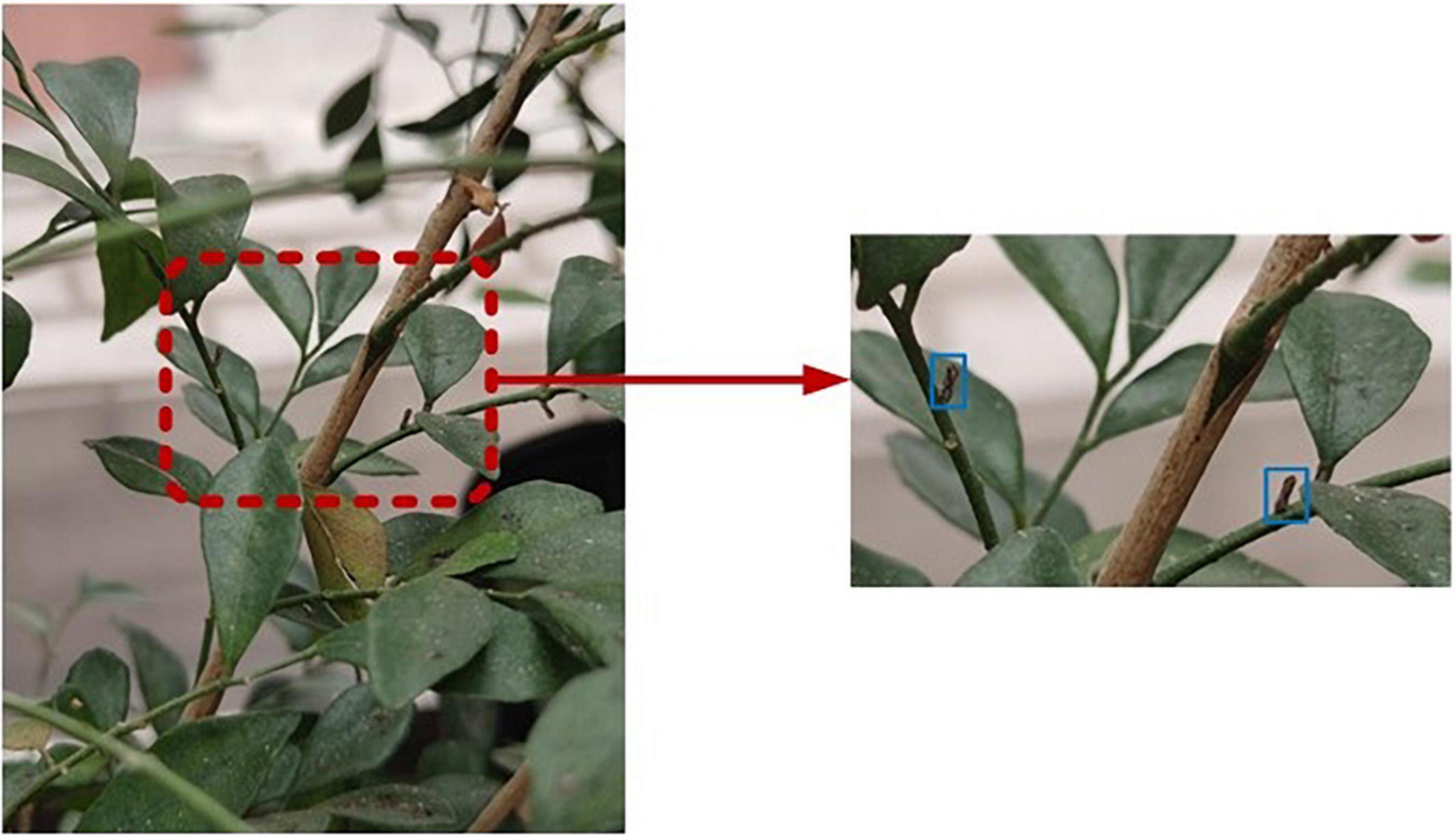
Figure 1. Experimental data. The blue box is used to mark citrus psyllids.
The relationship between the number of targets and images was analyzed through observation and mathematical statistics and is shown in Figure 2. Most of the pictures contain a small number of psyllid samples. The size of the citrus psyllid is much smaller than the size of the entire image, so this research belongs to the small target detection range.
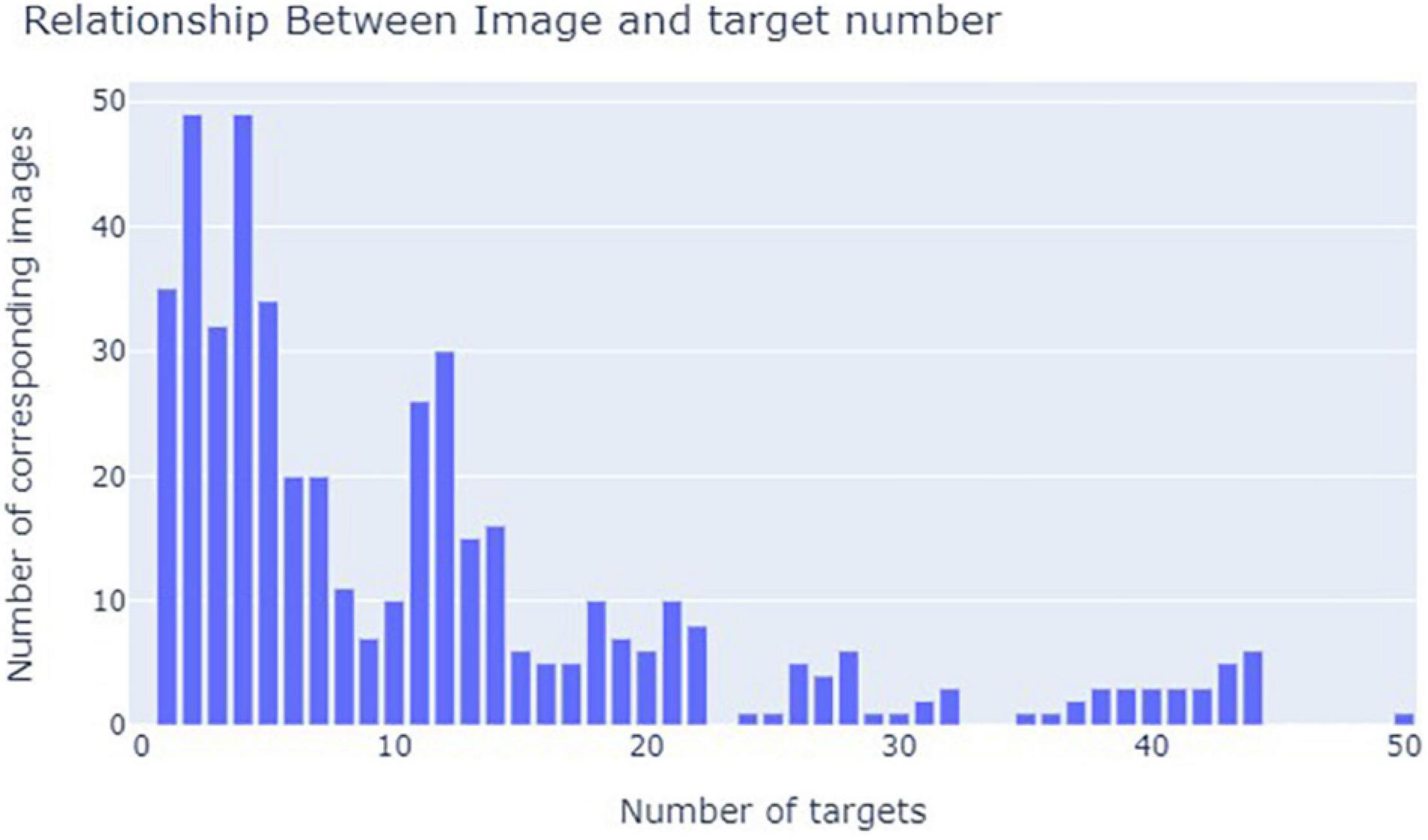
Figure 2. Diagram of the relationship between the picture and the target quantity.
The number of citrus psyllids in the picture can influence the training effect of the model. The more the number of psyllids in the picture, the more positive samples will be produced during the training, and the more the model will learn the characteristic information of psyllids. Therefore, to improve the identification effect of psyllids, the first step is to increase the sample number of citrus psyllids in the picture. For this kind of small target, there are many ways to enhance the small target, such as component stitching (Chen Y. et al., 2020), artificial augmentation by copy-pasting the small objects (Kisantal et al., 2019), AdaResampling (Ghiasi et al., 2020), and scale match (Yu et al., 2020). Due to the randomness of the target distribution, the number of targets distributed in each image is inconsistent. After cropping, a lot of pictures lack psyllid samples, which causes great difficulties in the recognition of the neural network.
To enhance the training effect of the model and improve the overall generalization ability of the model, the diversity of small target positions was increased by copying and pasting small targets multiple times and randomly pasting targets that do not overlap with existing targets. Based on the principle of replication, a method to increase the number of citrus psyllids was proposed, and the process is shown in Figure 3.
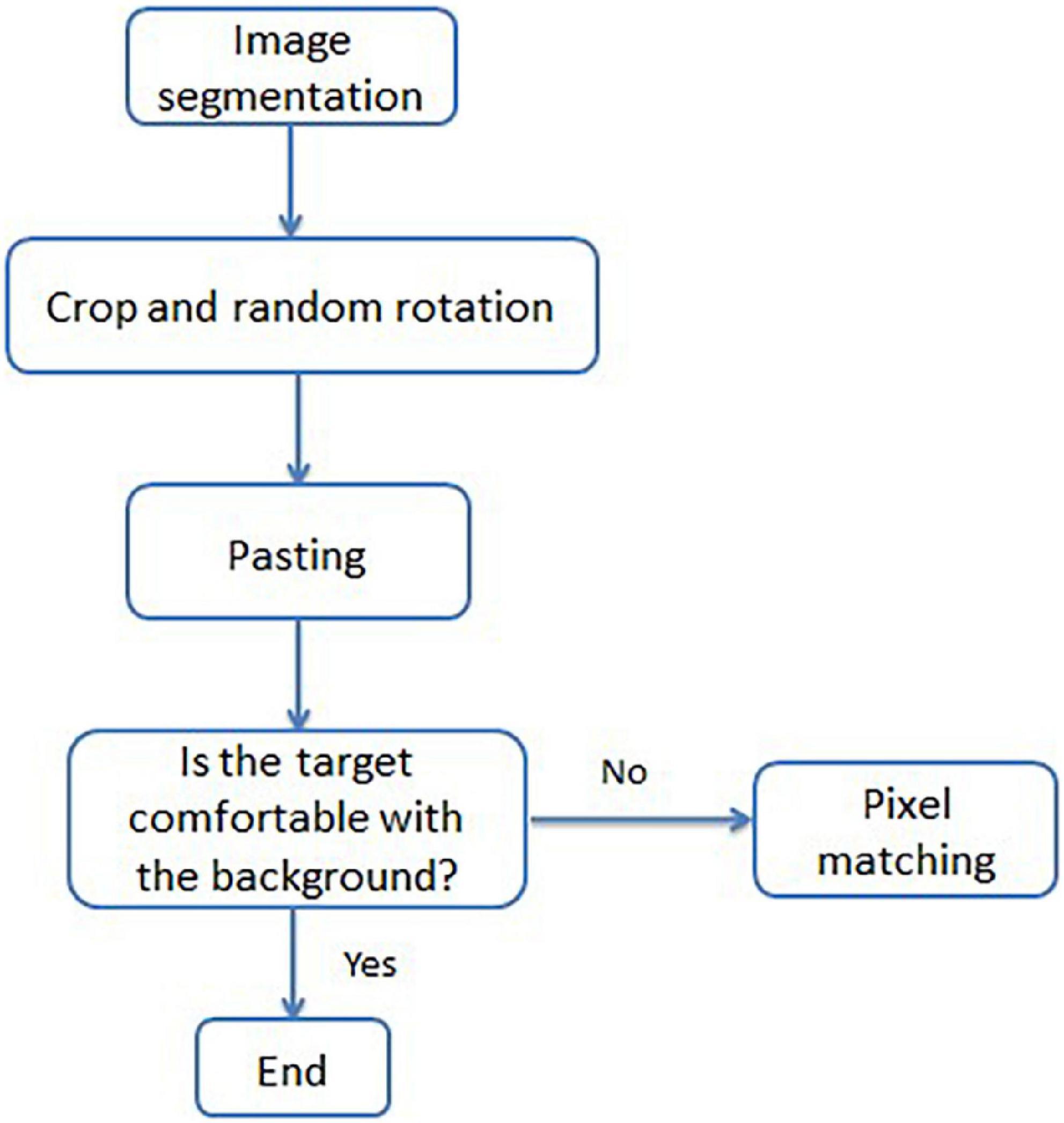
Figure 3. Small sample number enhancement flowchart.
First, the pretrained semantic segmentation model U-Net (Ronneberger et al., 2015) was adopted to remove the redundant background of each image in the training set, only retaining the leaves and tree trunks. Then, each citrus psyllid sample was randomly copied and pasted onto the leaf or trunk position, ensuring that the pasted position does not coincide with the current position. Multiple copy and paste operations on different pictures with fewer targets were performed. The pasted target may not be in harmony with the background of the pasted position. When the pasted target is too bright or too dark compared with the surrounding background, the neural network will be very sensitive to the difference. The trained model can only have good generalization ability for the enhanced image, but a poor detection effect for the unenhanced natural lens image. Therefore, the color of the target that cannot be integrated into the background after pasting was modified manually, so that the target is as harmonious as possible with the background of the pasting place. The calculation formula for the overlap rate of the outer region (the background part removed by segmentation) and the sample overlap rate of the inner region (the leaves and trunk parts) is defined as Eqs. 1 and 2, where UOuter region is the overlap rate of the outer region and USamples is the sample overlap rate of the inner region; Areacopy represents the area where the sample is located after copying, Areaouter region represents the outside area, and UOuter region represents the degree of overlap between the area where the sample is located and the outer area after copying. The larger the UOuter region, the larger the area where the sample is located in the outer area after copying; n is the total number of original image samples; AreaSamples represents the total area occupied by the original image samples, and USamples represents the degree of overlap between the area occupied by the copied samples and the area occupied by the original image samples.
During the enhancement process, the Areacopy of the sample area after being selected and pasted needs to meet the following conditions:
That is, the copied sample area needs to be in the area without overlapping with the original sample area. The example process of data enhancement is shown in Figure 4.
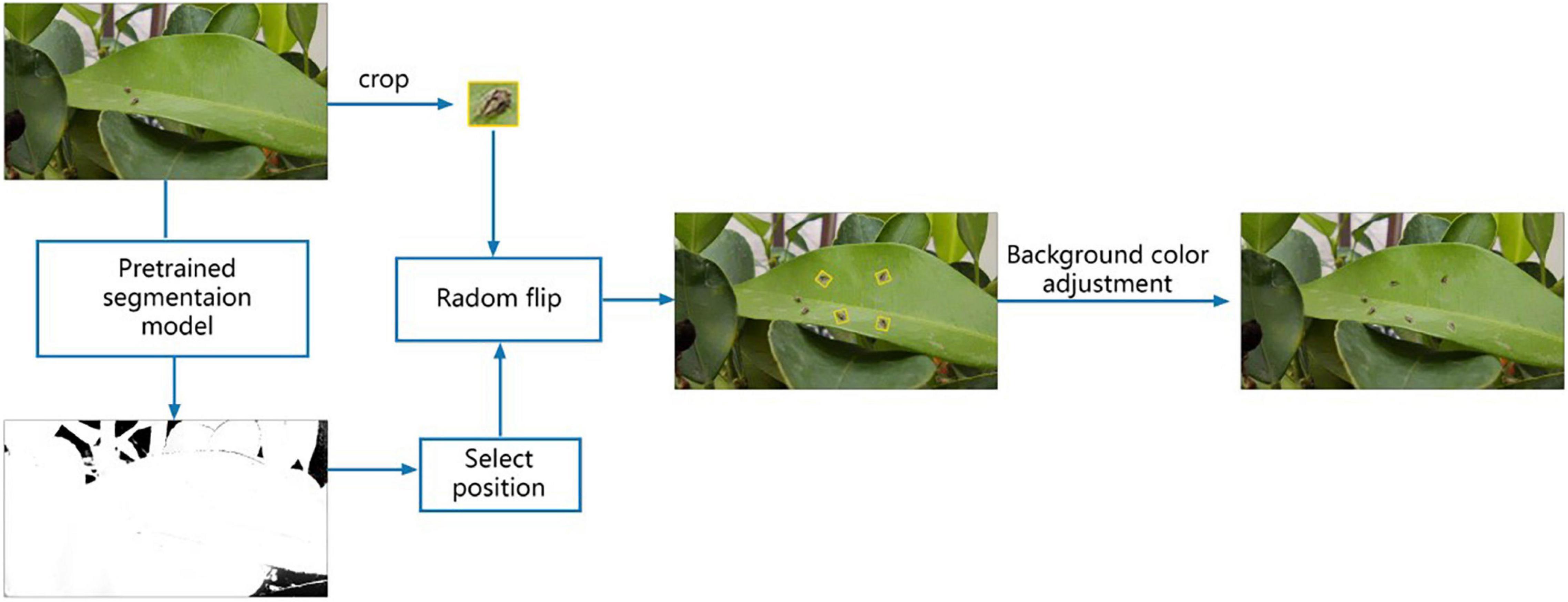
Figure 4. Small sample number enhancement example diagram.
The white part in the segmentation diagram is the inner area, and the black part is the outer area.
Furthermore, the performance of the model is affected by the number of training sets. With the increase in training data, the recognition performance of the model will be improved to a certain extent. To increase the training data set and improve the general recognition ability of psyllids, offline resampling was used in the experiment. Two times the resampling rate was used to process the image set after the target samples were enhanced in the image. Since the image needs to be preprocessed before being input to the network, the data are not exactly the same after preprocessing, so there will be no overfitting of the training set.
The image set captured in this study was high-resolution (4,000 × 5,000 pixels). If these data are directly input into the network for training, it will lose a lot of useful citrus psyllid information due to compression during the training process. Therefore, the high-resolution images were cropped into nine blocks before being input into the network in this study. The size of the input image affects the performance of the detection model, and the feature map generated by the feature extraction network is often dozens of times smaller than the original image, which will make it difficult for the detection network to capture the feature description of citrus psyllids. Therefore, this study uses multiscale training to improve the performance of the model. In view of the advantages of multiscale training, two scales (1500, 1000) and (1333, 800) were set, and each scale was randomly selected for training in each epoch. To increase the diversity of training samples, the input image was rotated randomly with 50% probability, and the image cropping flowchart is shown in Figure 5.
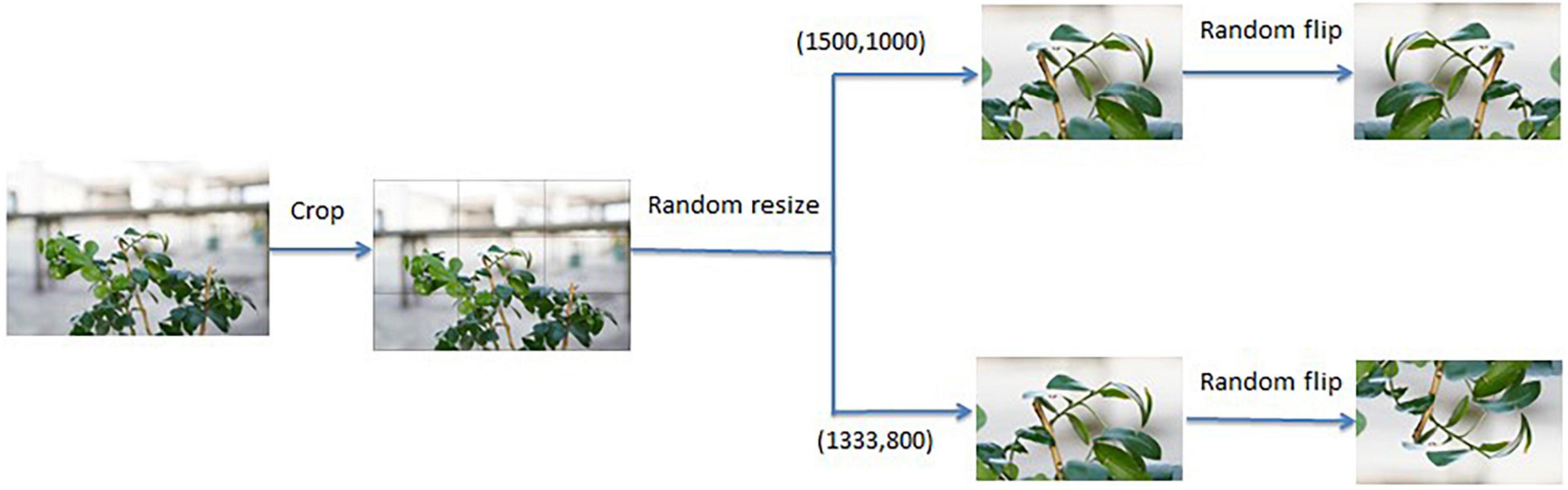
Figure 5. Image cropping flowchart.
High-resoultion network (HRNet) (Sun et al., 2019) can learn enough high-resolution representations, which is different from the traditional classification network. In view of the small size of the citrus psyllids, if the traditional neural network is used for feature extraction, the key feature information of the shape and color of the citrus psyllids or the high-resolution feature information can be easily lost in the last layer of the network, whereas HRNet can maintain the high-resolution representation of citrus psyllid features by connecting high-resolution and low-resolution convolutions in parallel and enhance the high-resolution representation of citrus psyllid features by repeatedly performing multiscale fusion across parallel convolutions. It can achieve better results in small-area classification such as citrus psyllids. Therefore, HRNet was adopted as a feature extraction network to reduce the information loss of citrus psyllid features in this study.
To make the network pay more attention to the characteristics of citrus psyllids, a lightweight attention mechanism convolution block attention module (CBAM) (Woo et al., 2018) was added to the network, which is an attention mechanism module combining space and channel, where channel attention mechanism focuses on what features are meaningful from the perspective of channel, while space attention mechanism focuses on what features are meaningful from the space scale of image. In this study, the CBAM attention mechanism was added to the first-stage feature extraction and the second-, third-, and fourth-stage feature fusion of HRNet as shown in Figure 6. Adding CBAM blocks to the first stage enables the network to lock the target features that need attention in the initial stage of feature extraction. Adding the CBAM fusion module to the second stage, the third stage, and the fourth stage fully enable the extraction of the important citrus psyllid feature information of different resolutions when fusing the features of different resolutions.
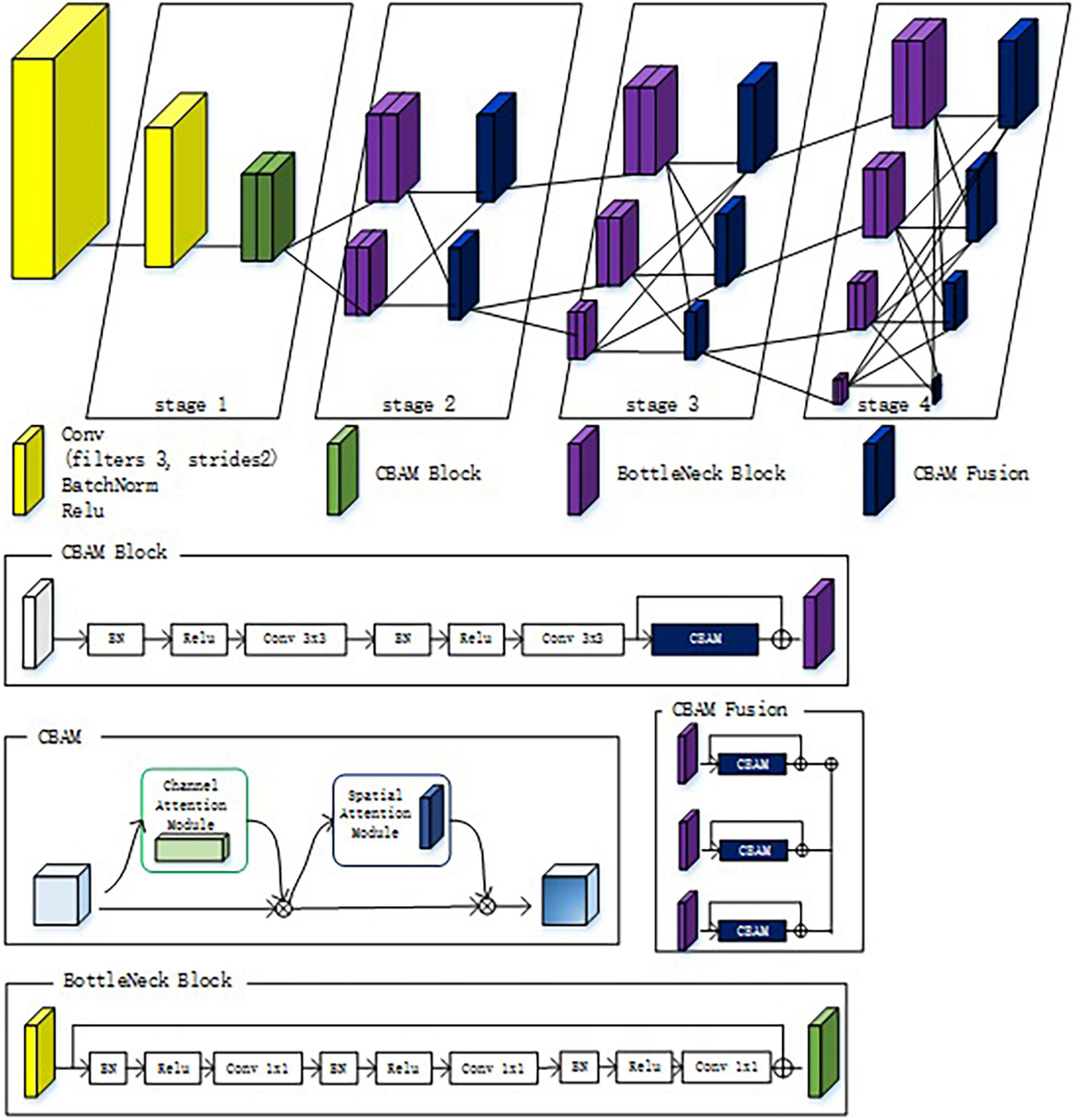
Figure 6. High-resoultion network (HRNet) model with CBAM attention mechanism.
As shown in Figure 6, the final network layer of the HRNet outputs four feature maps with different resolutions. Because of the small size of the citrus psyllids, the information of the citrus psyllid characteristic map at each resolution may be lacking, and different resolutions’ information needs to be combined to complement each other. To make full use of the feature maps at different resolutions, the atrous spatial pyramid pooling (ASPP) (Chen et al., 2017) (dilated space convolution pooled pyramid) structure was used for feature fusion at different resolutions in this study. In ASPP, the extracted characteristics of citrus psyllids are input into the dilated convolutions at different sampling rates, which is equivalent to capturing the characteristic information of citrus psyllids at multiscale. The dilated convolutions in the ASPP structure can expand the field of view without losing the resolution, and features under different dilation rates are collected in parallel to obtain the multiscale information of citrus psyllids, and such these operations can improve the recognition effect of the entire network, which is shown in Figure 7. However, ASPP only uses a large dilation rate [such as (1, 3, 6, 12)] which is only effective for large object detection, but not suitable for citrus psyllid detection. To make full use of the advantages of ASPP and more suitable for the characteristics of small target detection in this study, the dilation rate was designed into a zigzag structure, the dilation rate was set to (1, 2, 5), and the feature pyramid networks (FPN) (Pan et al., 2019) which is shown in Figure 8 was used to fuse the 4 citrus psyllids features at different resolutions processed by ASPP.
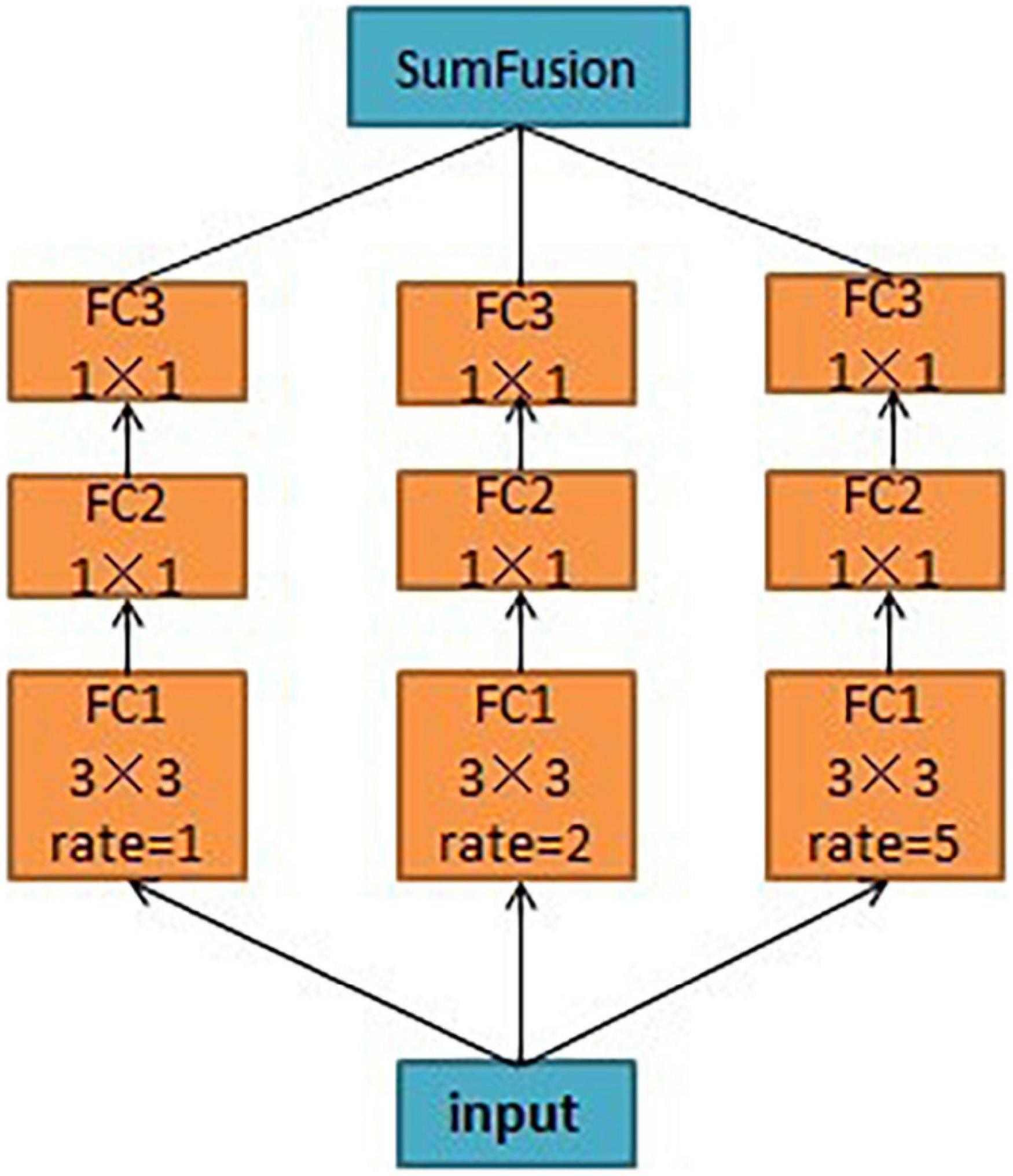
Figure 7. Atrous spatial pyramid pooling (ASPP) structure.
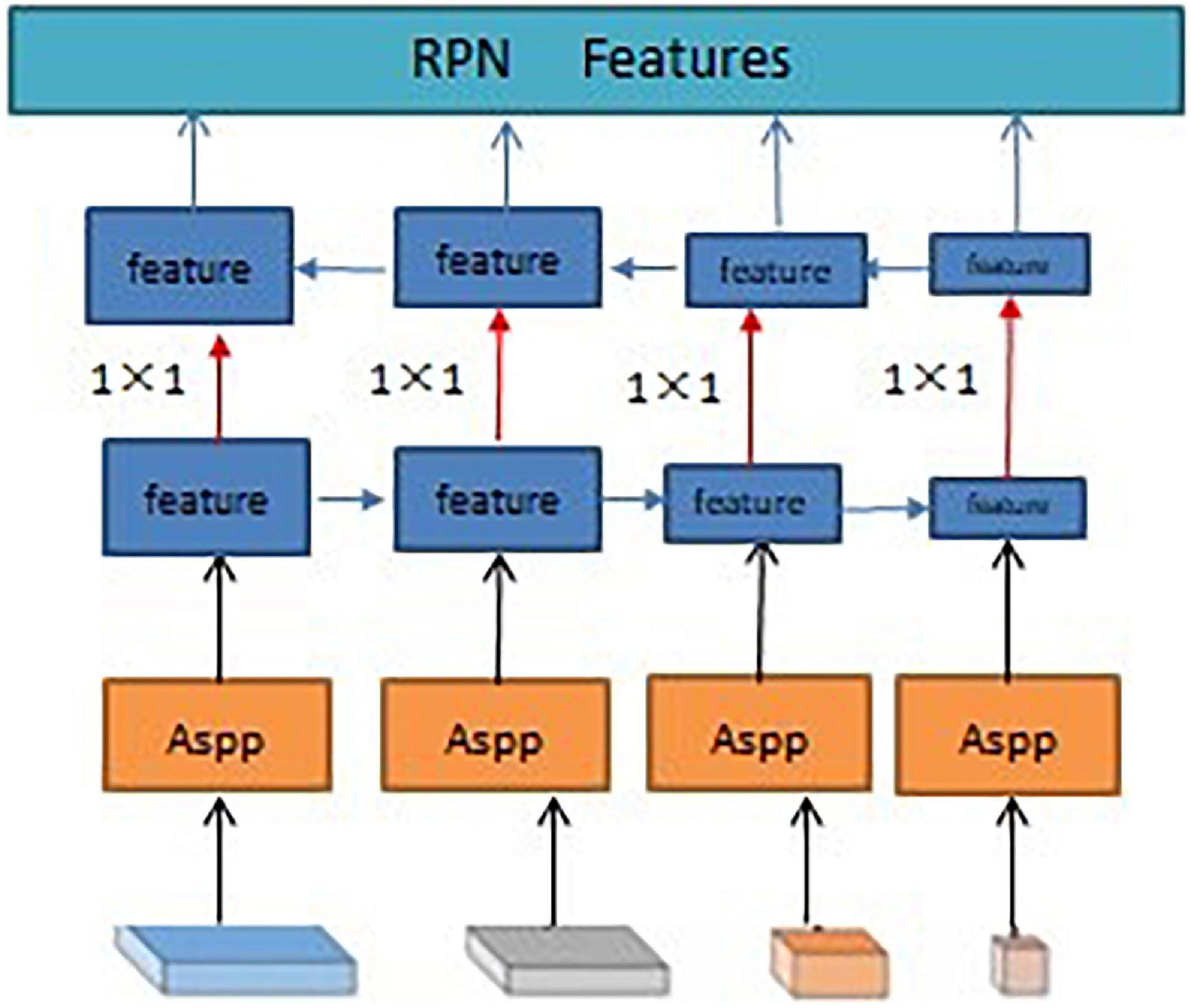
Figure 8. Feature pyramid networks (FPN) structure.
Besides, the shape and color of citrus psyllids are similar to branches, tree stems, and dead leaves, so the model will produce more positive and negative samples with higher loss during the training process. For example, the model predicts part of the trunk as citrus psyllids. Using the traditional random sampling method, a large number of difficult samples, such as branches, may be missed. The model trained using the random sampling method cannot distinguish citrus psyllids, tree branch, and tree stem. So, in this study, random sampling method in cascade R-CNN was replaced by an online hard sample mining strategy (Shrivastava et al., 2016), and the suggestion box with high-loss value was given high priority to be sampled. The strategy is as follows: in the training process, the ROI loss in each stage is sorted, and the first 64 samples of ROI loss in the positive samples and the first 192 samples of ROI loss in the negative samples as training samples are selected according to the sorting structure.
The models for identifying citrus psyllids were trained and tested under the desktop computer with inter-i7-9800x CPU, GeForce GTX 1080ti GPU, Ubuntu 16.04 operating system, and PyTorch deep learning framework. The average detection time of high-resolution images is 10 ms per image. To evaluate the effectiveness of the citrus psyllid detection method proposed in this study, the average precision (AP) and mean average precision (mAP) were chosen as evaluation indicators, where AP is a measure of the average precision value of a category detection, using the precision rate to integrate the recall rate, as shown in eq. (4), mAP is a measure of the average value of all types of AP, as shown in formula (5).
Where c represents a certain category, and C represents the general category.
Figure 9 shows the comparison matrix of the number of small targets before and after enhancement. The top row of Figure 9A is the original image, and the bottom row is the enhanced image. Figure 9B is the contrast matrix of the number of objects before and after the enhancement. Through observation, it can be found that using the small sample number enhancement method based on the semantic segmentation model improves the number of small targets in each picture in the data set. As the number of small samples per picture increases, a large number of useful positive samples is increased, which can effectively increase the performance of the model.
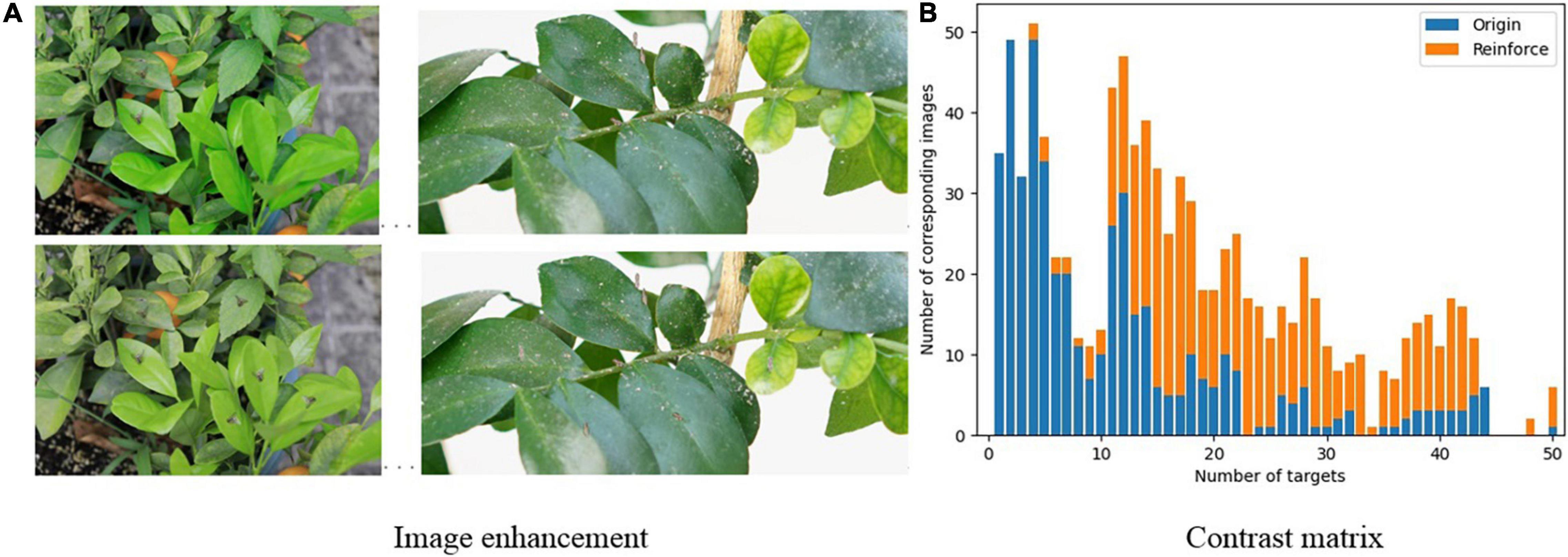
Figure 9. Comparison of the number of small targets before and after enhancement (A) image enhancement (B) contrast matrix.
Figure 10 is a comparison diagram of sampling three cascades using random sampling and difficult sample mining methods in cascade R-CNN. It can be found that most random samples are distributed in areas with low classification loss. This is because negative samples contain lots of low-loss samples, so random sampling has a high probability of collecting these low-loss samples. However, the generalization ability of the model trained with lots of low-loss samples is not strong, and it could not classify hard samples well. Also, it shows that the samples collected by the hard sampling method are concentrated in the high-loss area. This is because the hard sample mining method will give priority to the samples with high classification loss, even if the samples contain a large number of samples with low loss. Therefore, the online hard sample mining algorithm can improve the ability of the model to identify difficult samples, so as to improve the overall performance of the model.
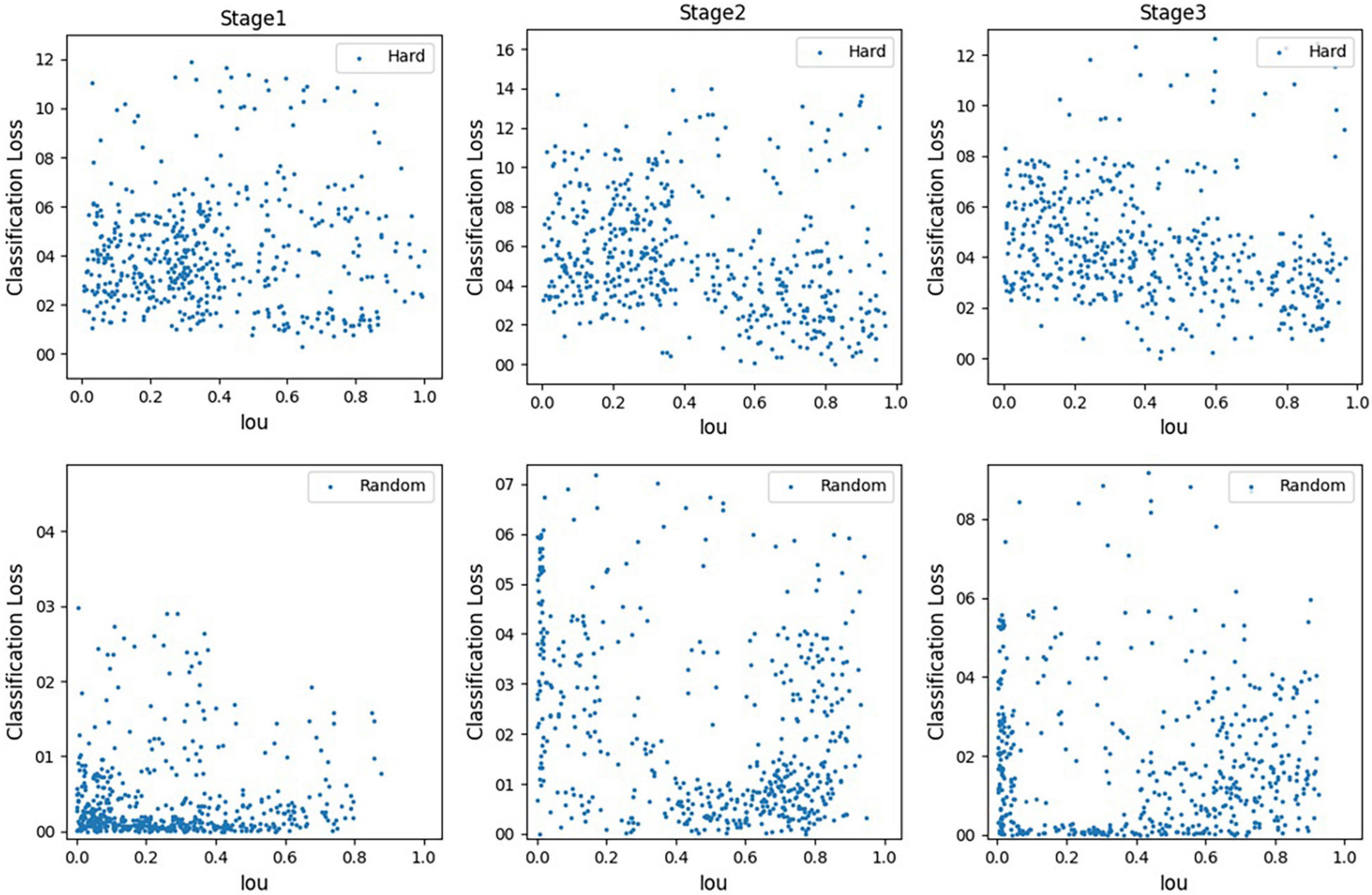
Figure 10. Comparison of difficult sampling and random sampling.
Some common models that are ResNet, VGGNet, and ResNetXt were adopted for comparison with the proposed method in this study. The AP and mAP values of the test results of the models are shown in Table 1. Data enhancement represents small target number enhancement and offline resampling. In Table 1, it can find that the improved HRNet + Data enhancement model has 9.0% higher AP than the improved HRNet + Offline resampling model. It can also be found that using small target number enhancement can improve the recognition effect of citrus psyllids to some extent. From the comparison, the AP values of the HRNet model were 6.14, 7.09, 5.76, and 6.65% higher than those of ResNet50, ResNet101, next101, and VGG16, respectively. The reason is that citrus psyllid is small in size, and it is easy to lose information when using traditional CNN to extract the characteristics of citrus psyllids. The model cannot fully learn the shape, size, distribution, and color information of citrus psyllids, so it does not have good generalization ability. The background area in the picture is much larger than the total area of the citrus psyllids. The model needs to find out the characteristic information of the citrus psyllids from many characteristic information. Therefore, adding an attention mechanism can enhance the attention of the network to the characteristic of the citrus psyllids, extracting key information from the shape, distribution, color, and size of citrus psyllids. In Table 1, the improved HRNet + Data enhancement model has higher AP than the HRNet model, which proves that adding the attention mechanism can improve model performance. The comprehensive improvement scheme (improved HRNet + ASPP + FPN + Online hard sample mining strategy + Data enhancement) has the best performance in detecting citrus psyllids, which is more than 10% higher than that of other models. This shows that the addition of ASPP and FPN structures can fully complement the characteristics of citrus psyllids at different resolutions and solve the problem of lack of information on citrus psyllids at a single resolution. Adding an online hard sample mining strategy can allow the model to focus on learning features of objects similar to citrus psyllids and solve the problem of indistinguishable branches, stalks, and dead leaves from citrus psyllids.
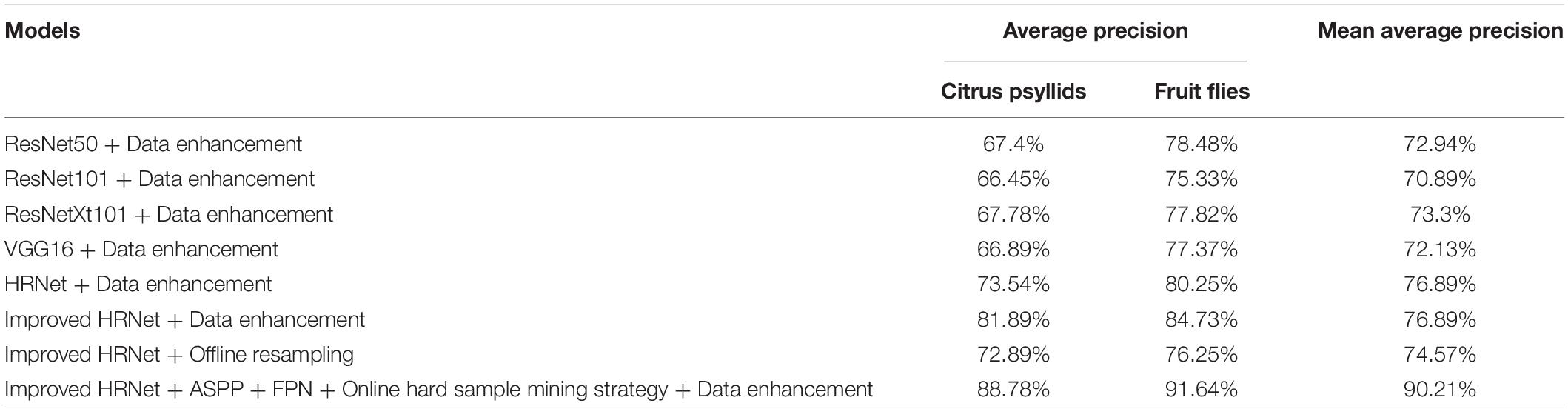
Table 1. Different model recognition effects.
The final proposed model not only performs well in the detection of citrus psyllids but also achieves good recognition performance on small targets such as citrus fruit flies. Citrus fruit flies are larger and have more obvious appearance characteristics than citrus psyllids, such as double wings and heads, so they are easier to identify than citrus psyllids. However, citrus fruit flies are also in the recognition range of small targets, and there are fewer pixels in the identifiable area. Therefore, it is difficult to accurately extract the characteristic information of fruit flies. Through Table 1, it can be found that the final model proposed can achieve 91.64% accuracy in citrus fruit fly recognition.
Table 2 shows the visual prediction results of each model on the original data. The red box is the citrus psyllid label, and the blue box is the prediction result. From the results, it can be found that the model using the improved HRNet as the feature extraction network can achieve a better recognition effect. At the same time, comparing the model of ResNet50 and the model of ResNet101 shows that the deeper the network layer is, the more unfavorable it is to recognize the citrus psyllids. From the results of the heat map, it shows that the model proposed in this study based on improved HRNet + Data enhancement + SPP + FPN + online hard sample mining can better extract the feature information of citrus psyllids.
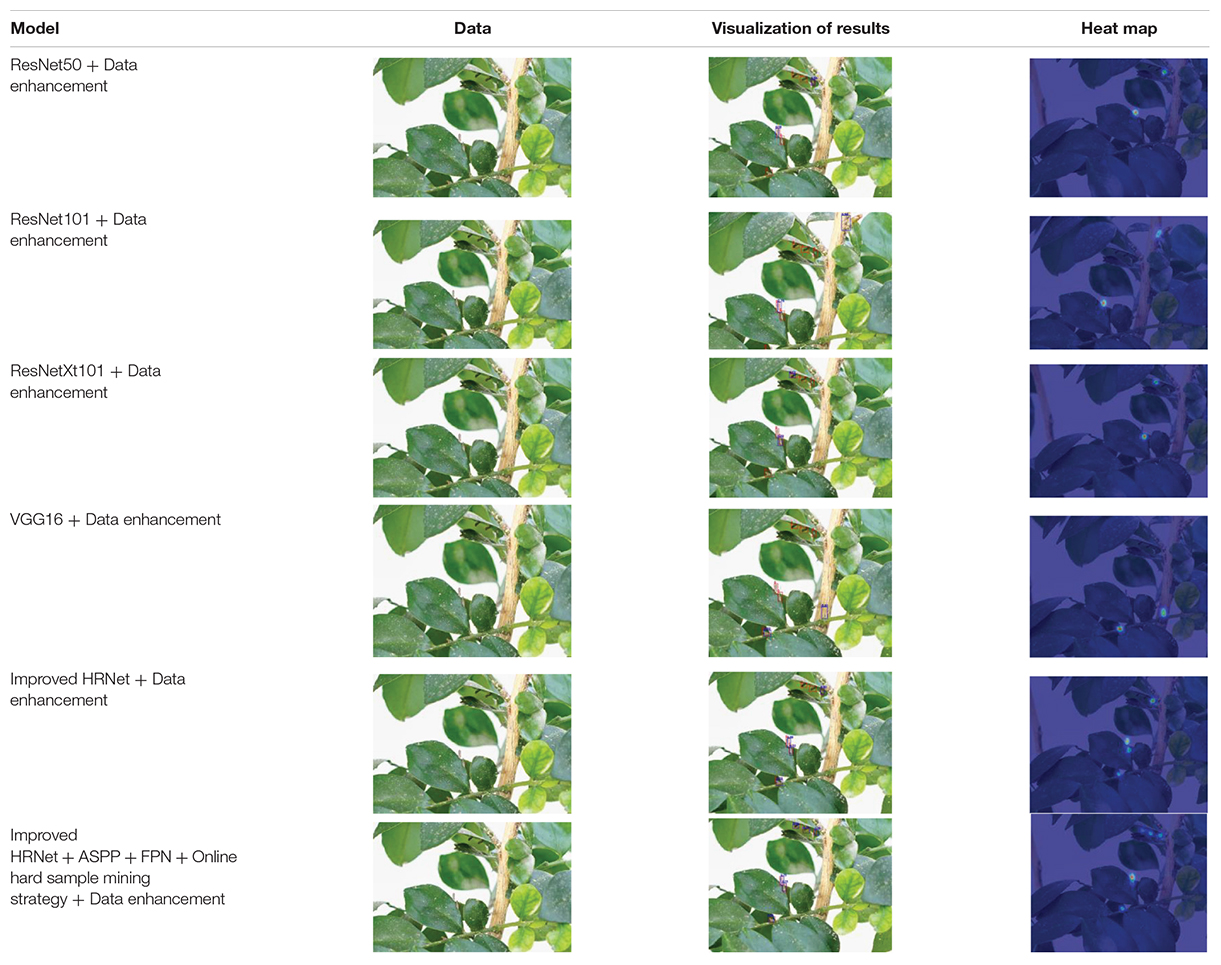
Table 2. Visualization results of different models.
Figure 11 shows the training loss diagram of the proposed comprehensive improvement scheme, where Figure 11A represents the total loss curve calculated with 1:0.5:0.25 weights for stage 1, stage 2, and stage 3, and Figure 11B represents the loss curve for RPN bbox on the training set.
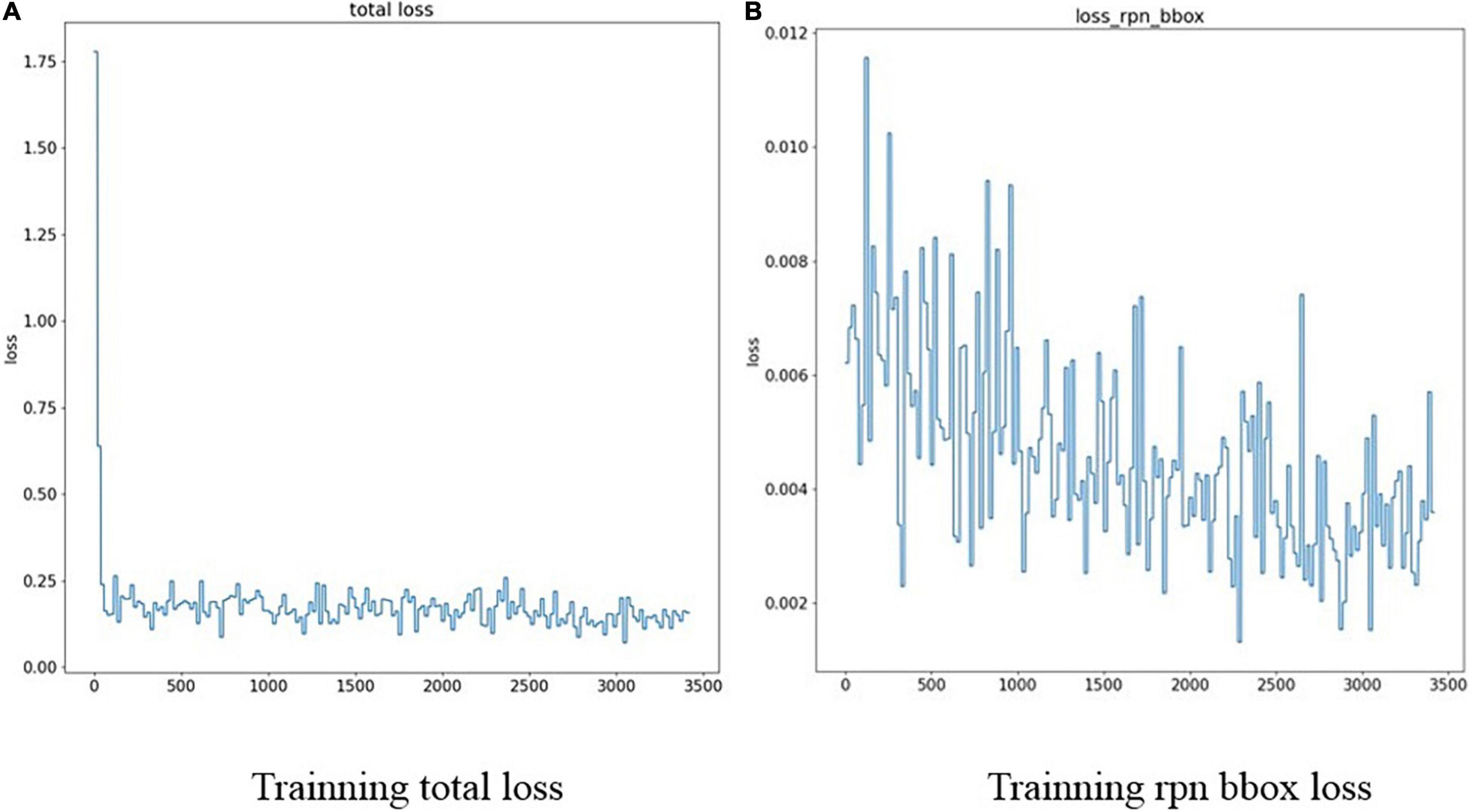
Figure 11. Training loss diagram (A) training total loss (B) training RPN bbox loss.
The prediction results for testing data of the proposed model are shown in Figure 12, where the red box is the label box, the blue box is the citrus psyllids prediction box, and the mint green is the fruit fly prediction box; the label category 0 represents the citrus psyllids and the label category 1 represents the fruit flies. The result shows that the overlap between the label frame and the prediction frame is very high, which proves that the improved model has a good performance in detecting citrus psyllids.
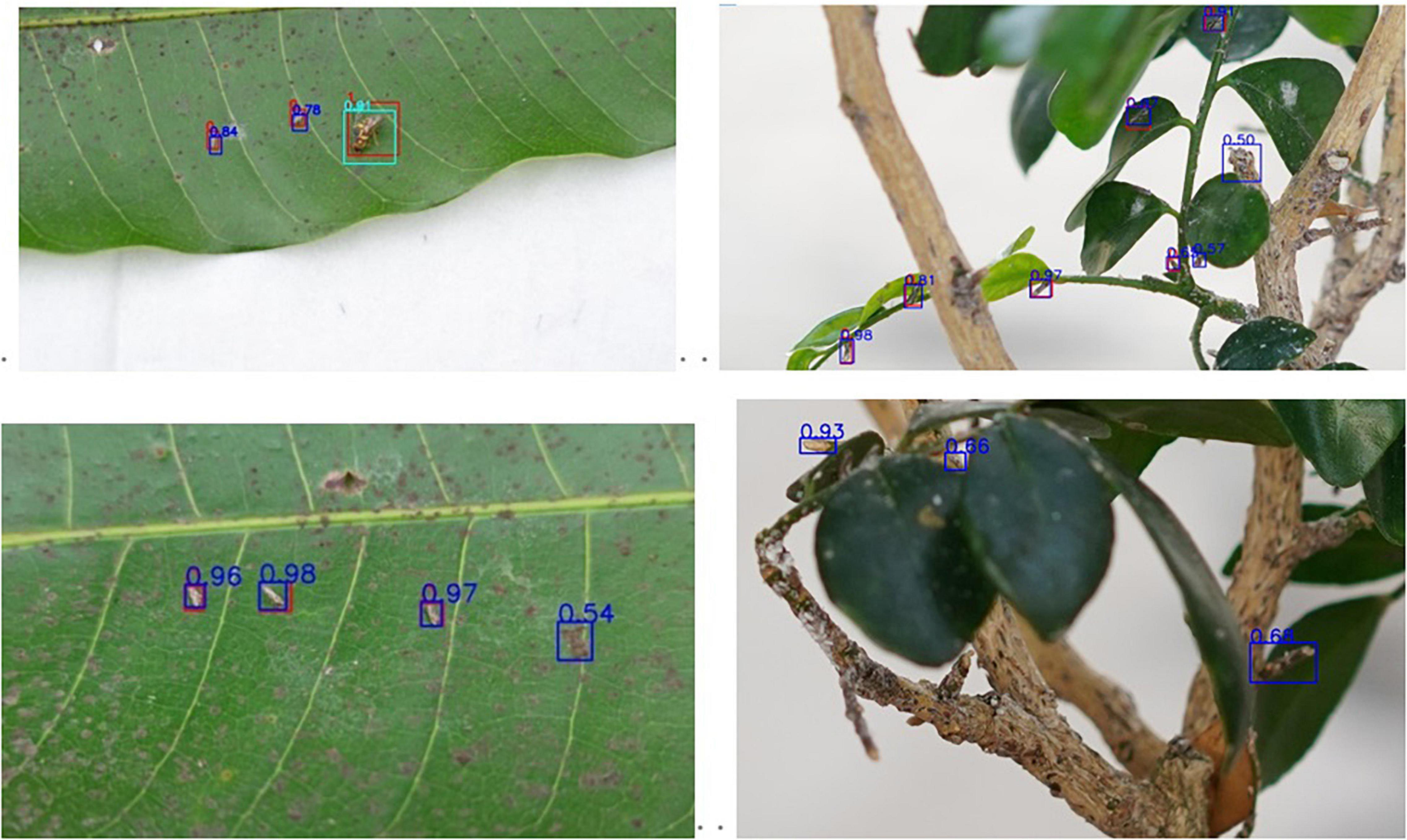
Figure 12. Prediction results.
Agricultural pests are small and difficult to be found, and traditional neural networks cannot meet the recognition of small target agricultural pests such as citrus psyllids. This study explores a suitable network and solution for the identification of citrus psyllids. The model proposed in this study can achieve a good recognition effect when the target is larger or slightly smaller than the size of the citrus psyllids, and there are some or no objects similar to the target in the background. Unfortunately, if the detection target is too small, much smaller than the psyllids, such as the red spider citrus (average size of 0.39 mm), the detection effect is not satisfactory using the proposed method of this article. Also, if the detection target is difficult to capture, such as the rice stem borer whose larvae burrow into the rice stalk to eat, it is hard to identify without manual intervention. Besides, if the plant background has a large number of parts that are very similar to the characteristics of the detection target, the recognition accuracy of the method proposed in this article might be reduced.
The use of RGB camera shooting in this study has a good promotion ability without costly equipment and professionals. Outdoor acquisition of RGB images is affected by lighting conditions. When the weather is cloudy, the general brightness of the image will be low due to the lack of light, which will lead to a decrease in the accuracy of target recognition. Besides, the different angles between the camera and the object will affect the recognition accuracy to a certain extent, and these problems can be solved by adding training data sets. If light conditions during acquisition are of interest, there is always the possibility of using scanners (Taheri-Garavand et al., 2021b). In this experiment, the model is trained by inputting pictures with different illumination conditions, distances, and angles. The complexity of the data sources in this experiment shows that this model can be applied to various environments, including laboratory environments and complex external environments, so the model has good generalization ability.
The proposed citrus psyllid detection method based on machine vision can be applied to the actual field monitoring of orchards, and the detection model can be deployed on edge computing devices to help orchard managers more easily monitor the occurrence of orchard pests and summarize the changes. Also, the proposed model can be deployed on terminal devices such as RGB cameras, mobile phones, and cameras mounted on an insect trapper or mobile platform to monitor pests in real time, greatly reducing labor costs, time costs, and resources.
The citrus psyllid has the characteristics of small size, similar color, and shape to branches, stems, and dead leaves, which causes difficulties to actual field monitoring based on machine vision. To detect citrus psyllids effectively, a comprehensive detection solution based on a high-definition camera for field detection is introduced in this paper. In view of uneven distribution of a small target in the image, a sample enhancement method to increase the number of target samples was first proposed. The detection model was built based on cascade R-CNN, which was improved by using HRNet as the feature extraction network, adding a lightweight attention mechanism CBAM in HRNet to make the network pay more attention to the citrus psyllid features, adding the ASPP structure to extract the high-resolution features from different scales, and integrating the features of different scales with FPN structure. In view of the similarity between citrus and tree branches, tree stems, and dead leaves, online hard sampling mining strategy was adopted. The results show that the improved cascade R-CNN detection model achieved 90.21% mAP on the test set, which is much higher than that of other models for the recognition of small targets. After deploying the detection model on edge computing devices, the proposed comprehensive solution can provide real-time detection of citrus psyllids in practical application, reducing the cost of artificial patrol and waste of resources. The solution proposed in this article provides a reference for field camera detection and identification of pests. In addition, early detection and treatment of citrus psyllids can reduce and prevent the occurrence of citrus HLB in citrus orchards.
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
FD conceptualized the experiments, selected the algorithms, collected and analyzed the data, and wrote the manuscript. FW and DY trained the algorithms and collected and analyzed the data. SL and XC wrote the manuscript. XD and YL supervised the project and revised the manuscript. All authors discussed and revised the manuscript.
This work was supported by the Key-Area Research and Development Program of Guangzhou (grant number 202103000090), Key-Area Research and Development Program of Guangdong Province (grant number 2019B020214003), Key-Areas of Artificial Intelligence in General Colleges and Universities of Guangdong Province (grant number 2019KZDZX1012), Laboratory of Lingnan Modern Agriculture Project (grant number NT2021009), National Natural Science Foundation of China (grant number 61675003), National Natural Science Foundation of China (grant number 61906074), and Guangdong Basic and Applied Basic Research Foundation (grant number 2019A1515011276).
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
HLB, citrus Huanglongbing; CNN, convolutional neural network; CBAM, convolution block attention module.
Arnal Barbedo, J. G. (2019). Plant disease identification from individual lesions and spots using deep learning. Biosyst. Eng. 180, 96–107. doi: 10.1016/j.biosystemseng.2019.02.002
Behrendt, K., Novak, L., and Botros, R. (2017). A Deep Learning Approach to Traffic Lights: Detection, Tracking, and Classification. Piscataway, NJ: IEEE. doi: 10.1109/ICRA.2017.7989163
Cai, Z., and Vasconcelos, N. (2017). Cascade R-CNN: Delving into High Quality Object Detection. Ithaca: Cornell University Press. doi: 10.1109/CVPR.2018.00644
Chen, C., Liu, M. Y., Tuzel, O., and Xiao, J. (2016). “R-CNN for small object detection,” in Proceedings of the Computer Vision – ACCV 2016. ACCV 2016. Lecture Notes in Computer Science, eds S. H. Lai, V. Lepetit, K. Nishino, and Y. Sato (Cham: Springer). doi: 10.1016/j.neucom.2017.09.098
Chen, J., Chen, J., Zhang, D., Sun, Y., and Nanehkaran, Y. A. (2020). Using deep transfer learning for image-based plant disease identification. Comput. Electron. Agric. 173:105393. doi: 10.1016/j.compag.2020.105393
Chen, L., Papandreou, G., Schroff, F., and Adam, H. (2017). Rethinking atrous convolution for semantic image segmentation. arXiv [Preprint]. Available online at: https://arxiv.org/abs/1706.05587 (accessed September 24, 2020).
Chen, Y., Zhang, P., Li, Z. L. Y., Zhang, X., and Meng, G. (2020). Feedback-driven data provider for object detection. arXiv [Preprint]. Available online at: https://arxiv.org/abs/2004.12432 (accessed January 10, 2021).
Cheng, X., Zhang, Y., Chen, Y., Wu, Y., and Yue, Y. (2017). Pest identification via deep residual learning in complex background. Comput. Electron. Agric. 141, 351–356. doi: 10.1016/j.compag.2017.08.005
Dala-Paula, B. M., Plotto, A., Bai, J., Manthey, J. A., Baldwin, E. A., Ferrarezi, R. S., et al. (2019). Effect of huanglongbing or greening disease on orange juice quality, a review. Front. Plant Sci. 9:1976. doi: 10.3389/fpls.2018.01976
Gallinger, J., and Gross, J. (2018). Unraveling the host plant alternation of cacopsylla pruni – adults but not nymphs can survive on conifers due to Phloem/Xylem composition. Front. Plant Sci. 9:484. doi: 10.3389/fpls.2018.00484
Ghiasi, G., Cui, Y., Srinivas, A., Qian, R., Lin, T.-Y., Cubuk, E. D., et al. (2020). Simple Copy-Paste is a strong data augmentation method for instance segmentation. arXiv [Preprint]. Available online at: https://arxiv.org/abs/2012.07177 doi: 10.1109/CVPR46437.2021.00294 (accessed January 25, 2021).
Han, H.-Y., Cheng, S.-H., Song, Z.-Y., Ding, F., and Xu, Q. (2021). Citrus huanglongbing drug control strategy. J. Huazhong Agric. Univ. 40, 49–57. doi: 10.13300/j.cnki.hnlkxb.2021.01.006
He, K., Zhang, X., Ren, S., and Sun, J. (2016). “Deep residual learning for image recognition,” in Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (Las Vegas, NV: IEEE Computer Society), 770–778. doi: 10.1109/CVPR.2016.90
Jiang, P., Chen, Y., Liu, B., He, D., and Liang, C. (2019). Real-time detection of apple leaf diseases using deep learning approach based on improved convolutional neural networks. IEEE Access 7, 59069–59080. doi: 10.1109/ACCESS.2019.2914929
Kisantal, M., Wojna, Z., Murawski, J., Naruniec, J., and Cho, K. (2019). “Augmentation for small object detection,” in Proceedings of the 9th International Conference on Advances in Computing and Information (Reston: AIAA). doi: 10.3390/s21103374
Liu, J., and Wang, X. (2020). Tomato diseases and pests detection based on improved yolo v3 convolutional neural network. Front. Plant Sci. 11:898. doi: 10.3389/fpls.2020.00898
Liu, W., Anguelov, D., Erhan, D. S. C., Reed, S., and Fu, C. Y. (2016). SSD: Single shot MultiBox Detector. Cham: Springer. doi: 10.1007/978-3-319-46448-0_2
Nasiri, A., Taheri-Garavand, A., Fanourakis, D., Zhang, Y., and Nikoloudakis, N. (2021). Automated grapevine cultivar identification via leaf imaging and deep convolutional neural networks: a Proof-of-Concept study employing primary iranian varieties. Plants 10:1628. doi: 10.3390/plants10081628
Ngugi, L. C., Abelwahab, M., and Abo-Zahhad, M. (2021). Recent advances in image processing techniques for automated leaf pest and disease recognition – a review. Inform. Process. Agric. 8, 27–51. doi: 10.1016/j.inpa.2020.04.004
Pan, H., Chen, G., and Jiang, J. (2019). Adaptively dense feature pyramid network for object detection. IEEE Access 7, 81132–81144. doi: 10.1109/access.2019.2922511
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A. (2016). “You only look once: unified, real-time object detection,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (New Jersy: IEEE). doi: 10.1109/CVPR.2016.91
Ren, S., He, K., Girshick, R., and Sun, J. (2017). Faster R-CNN: towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach Intell. 39, 1137–1149. doi: 10.1109/TPAMI.2016.2577031
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-Net: Convolutional Networks for Biomedical Image Segmentation. Berlin: Springer International Publishing. doi: 10.1007/978-3-319-24574-4_28
Shrivastava, A., Gupta, A., and Girshick, R. (2016). “Training region-based object detectors with online hard example mining,” in Proceedings of the IEEE Conference On Computer Vision & Pattern Recognition (San Juan: IEEE), 761–769. doi: 10.1109/CVPR.2016.89
Simonyan, K., and Zisserman, A. (2014). Very deep convolutional networks for Large-Scale image recognition. arXiv [Preprint]. Available online at: https://arxiv.org/abs/1409.1556 doi: 10.3390/s21082852 (accessed September 20, 2020).
Singh, U. P., Chouhan, S. S., Jain, S., and Jain, S. (2019). Multilayer Convolution Neural Network for the Classification of Mango Leaves Infected by Anthracnose Disease. Piscataway, NJ: IEEE. doi: 10.1109/ACCESS.2019.2907383
Sun, K., Xiao, B., Liu, D., and Wang, J. (2019). Deep High-Resolution representation learning for human pose estimation. arXiv [Preprint]. Available online at: https://arxiv.org/abs/1902.09212 (accessed August 10, 2020).
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S., Anguelov, D., et al. (2014). Going deeper with convolutions. arXiv [Preprint]. Available online at: https://arxiv.org/abs/1409.4842 (accessed August 20, 2020).
Taheri-Garavand, A., Nasiri, A., Fanourakis, D., and Fatahi, S. (2021a). Automated in situ seed variety identification via deep learning: a case study in chickpea. Plants 10:1406. doi: 10.3390/plants10071406
Taheri-Garavand, A., Rezaei Nejad, A., Fanourakis, D., Fatahi, S., and Ahmadi Majd, M. (2021b). Employment of artificial neural networks for non-invasive estimation of leaf water status using color features: a case study in Spathiphyllum wallisii. Acta Physiol. Plant. 43:78. doi: 10.1007/s11738-021-03244-y
Woo, S., Park, J., Lee, J. Y., and Kweon, I. S. (2018). “CBAM: convolutional block attention module,” in Proceedings of the Computer Vision – ECCV 2018. ECCV 2018. Lecture Notes in Computer Science, eds V. Ferrari, M. Hebert, C. Sminchisescu, and Y. Weiss (Cham: Springer). doi: 10.1007/978-3-030-01234-2_1
Xia, G., Bai, X., Ding, J., and Zhu, Z. (2017). DOTA: a large-scale dataset for object detection in aerial images. arXiv [Preprint]. Available online at: https://arxiv.org/abs/1711.10398 (accessed October 10, 2020).
Xie, S., Girshick, R., Dollár, P., Tu, Z., and He, K. (2016). Aggregated residual transformations for deep neural networks. arXiv [Preprint]. Available online at: https://arxiv.org/abs/1611.05431 (accessed October 1, 2020).
Yu, X., Gong, Y., Jiang, N., Ye, Q., and Han, Z. (2020). “Scale match for tiny person detection,” in Proceedings of the 2020 IEEE Winter Conference On Applications of Computer Vision (WACV) (Piscataway, NJ: IEEE). doi: 10.1001/archneur.1994.00540150054016
Zhang, S., Benenson, R., and Schiele, B. (2017). CityPersons: a diverse dataset for pedestrian detection. arXiv [Preprint]. Available online at: https://arxiv.org/abs/1702.05693 doi: 10.1109/CVPR.2017.474 (accessed October 20, 2020).
Keywords: citrus psyllids, deep learning, small target detection, cascade R-CNN, small target enhancement
Citation: Dai F, Wang F, Yang D, Lin S, Chen X, Lan Y and Deng X (2022) Detection Method of Citrus Psyllids With Field High-Definition Camera Based on Improved Cascade Region-Based Convolution Neural Networks. Front. Plant Sci. 12:816272. doi: 10.3389/fpls.2021.816272
Received: 16 November 2021; Accepted: 06 December 2021;
Published: 24 January 2022.
Edited by:
Hanno Scharr, Helmholtz Association of German Research Centres (HZ), GermanyReviewed by:
Dimitrios Fanourakis, Technological Educational Institute of Crete, GreeceCopyright © 2022 Dai, Wang, Yang, Lin, Chen, Lan and Deng. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yubin Lan, eWxhbkBzY2F1LmVkdS5jbg==; Xiaoling Deng, ZGVuZ3hsQHNjYXUuZWR1LmNu
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.