 Yuan Li1,2
Yuan Li1,2 Bingqian Wang
Bingqian Wang Haitao Xu
Haitao Xu
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Phys., 07 May 2024
Sec. Social Physics
Volume 12 - 2024 | https://doi.org/10.3389/fphy.2024.1387709
This article is part of the Research TopicReal-World Applications of Game Theory and OptimizationView all 17 articles
Maritime area detection technology applies equipment such as high-orbit satellites, gateway ships and Unmanned Aerial Vehicles to detection. In this scenario, real-time uploading and analysis of maritime data is crucial. In the existing scenario, UAV data are gathered to the gateway ship and uploaded to the shore-based cloud via the high-orbit satellite, because the communication distance of the high-orbit satellite is far, and when the uploaded data volume is large or the access to the equipment increases, the propagation delay of the uploading of the data from the gateway ship to the satellite and the forwarding of the data from the satellite to the shore-based cloud is longer, and the processing delay of the shore-based cloud is increased, and the efficiency of the data transmission and communication will be affected as well. Aiming at the problem of increasing delay caused by communication limitations in maritime area detection, this paper proposes a maritime area detection scheme based on cloud-side collaboration. The scheme solves the problem of communication limitation from the following two aspects. First, the edge computing nodes are deployed on the ship side of the gateway, and the optimal offloading ratio is sought through game theory to offload a part of the tasks from the center cloud to the edge cloud for processing, which improves the efficiency of processing data and thus reduces the data transmission latency and data processing delay. Secondly, low-orbit (LEO) satellites are introduced to provide communication services, because low-orbit satellites have low orbital altitude and short propagation delay, which can transmit the data at the gateway ship to the shore-based cloud more quickly and improve the data transmission efficiency. Finally, it is also verified by designing experiments that the proposed scheme adopts the optimal offloading ratio and has a lower total delay than the original scheme, thus proving the effectiveness of the proposed scheme.
Timely mastery of the enemy’s accurate real-time military intelligence is the key to the navy’s military decision-making. UAV-based sea area detection technology has the advantages of wide detection area, high real-time intelligence acquisition, low detection cost, etc., which can comprehensively enhance the navy’s ability to detect the sea area, and the technology has been widely used in sea area detection [1, 2].
The maritime area detection mission requires the shore-based cloud to send the maritime area target detection mission to the gateway ship through high-orbit satellite communication, and the UAV-carrying gateway ship receives the mission instruction and then sends the UAV to detect the formulated area at sea [3, 4]. The UAV arrives at the designated position and altitude to carry out the detection and returns the detection data, including video, infrared images, radar detection signals, and data collected by the mounted sensor equipment, etc., and each UAV has a fixed collection frequency. Among them, ultra-short wave communication is used between the gateway ship and the UAV. The gateway ship summarizes the data collected by the drones, after which the data is transmitted back to the shore-based cloud center via satellite for data processing, and the powerful arithmetic capability of the cloud center is used to realize functions such as pattern recognition and trend prediction [5]. Through the above process, the UAV can quickly and efficiently complete the detection task, provide timely decision support for the command center, and assist the commander in quickly carrying out the subsequent task arrangement [6].
Currently, high-orbit satellite communication is used between the gateway ship and the shore-based cloud terminal [7]. However, as high-orbit satellites are far from the ground, they need to overcome a large spatial distance when transmitting data, resulting in long propagation delays for the uploading of data from the gateway ship to the satellite and for the forwarding of data from the satellite to the shore-based cloud. This may reduce the real-time nature of the data, which in turn affects the decision-making ability of the command center. Second, the current communication scheme needs to upload all the data collected by the UAVs pooled by the gateway ship via satellite to the shore-based cloud for processing. If the amount of data to be uploaded is large, it will increase the transmission delay of data uploading, which increases the pressure on the network bandwidth, making the utilization of limited network resources somewhat challenged, and the data may face the risk of being intercepted or tampered with in the transmission process. This may affect the decision-making efficiency of the command center and the security of the transmitted data. In addition, the efficiency of data transmission and communication may also be affected in the case of increased access to devices. In addition, when uploading data from gateway ships to satellites and forwarding data from satellites to shore-based clouds, the communication bandwidth of high-orbit satellites is relatively limited, and especially when processing a large amount of data, transmission bottlenecks may be encountered, which affects the speed and stability of data transmission. Based on the above, the use of high-orbit satellites for maritime area exploration missions, where a large amount of data is transmitted from the gateway ship via the high-orbit satellites to the shore-based cloud for complex processing and analysis, affects the temporal complexity and spatial complexity of the data processed by the shore-based cloud and affects the effectiveness and validity of the data.
In this paper, we have conducted an in-depth study on the maritime area detection scheme and proposed a cloud-edge cooperative-based maritime area detection scheme, which solves the existing communication limitation problem from two aspects, including the deployment of edge computing nodes on the ship side of the gateway. In addition, to shorten the communication distance and reduce the latency, the new scheme also replaces the high-orbit satellites with low-orbit satellites. The main contribution of this paper:
1) First, a detailed description of the cloud-side collaboration-based maritime area detection scheme is presented, including two aspects to solve the problem of increased latency due to limited communication. The latency of each process is calculated from data acquisition to decision support based on data processing results.
2) Secondly, the performance of the proposed scheme is verified, and the latency is selected as the verification metric and the latency of each part of the service processing is calculated. The effectiveness of the improved scheme is verified by comparing the latency of the original scheme and the improved scheme.
The whole paper is organized as follows. The related work is summarized in Section 2. The system model is given in Section 3 and the experiment is given in Section 4. The conclusions are presented in section 5.
The maritime area detection task requires fast and efficient uploading of the data collected by the UAVs pooled on the ship side of the gateway to the shore-based cloud for data processing and target identification, to ensure that the whole process of maritime UAV detection can quickly and efficiently complete the detection task, to provide timely decision-making support for the command center, and to assist the commander in quickly carrying out the subsequent task arrangements. Therefore, the requirements for communication and computing capability are very high.
Aiming at the communication-computing resource collaboration problem, Ref. [8] proposed a computation offloading framework to offload computation or data to nearby devices. To reduce energy and time consumption, a multi-objective computation offloading method for cloud-edge on-dispersion in the Internet of Vehicles (IoV) is proposed to shorten the processing time of computation tasks by offloading them to edge computing devices [9]. An efficient computation offloading and resource allocation scheme in edge computing networks for the Internet of Vehicles is proposed to achieve low complexity and significantly improve system performance [10]. A collaborative computation offloading scheme is proposed to shorten the total service time for the problem of limited computation capability of underwater sensor nodes [11]. The authors in the paper [12] proposed a heterogeneous edge–cloud computing framework, in which a novel collaborative offloading scheme was designed to minimize the task execution latency. In Ref. [13], the authors formulated an optimization problem for edge–cloud computing networks, where the service placement and the power control of the base station were jointly considered, to enhance the resource efficiency.
For the cloud-network convergence scenario, considering that the general cloud center is far away from the end side and there is a latency problem. Therefore, it is necessary to offload the data and computational tasks of maritime area detection to the edge side for processing collaboratively to form a cloud-side collaboration model to reduce the latency. A cloud-edge collaboration approach is proposed to perform maintenance of critical vehicle components, which improves maintenance efficiency and safety [14]. A cloud-edge collaboration approach is proposed to improve the availability and effectiveness of safety supervision and inspection of power operations [15]. In MEC-enabled networks, Ref. [16] presented a two-level bargaining-based incentive mechanism for collaborative computing, aiming to maximize the offloading utilities of both edge cloud and central cloud. The authors in the paper [17] investigated a dynamic offloading scheme for an edge-cloud collaboration system and formulated an optimization problem to minimize the average cost under a series of constraints. In the paper [18], a collaborative cloud-edge computation offloading method was designed by considering both computing and transmission energy consumption.
Aiming at the communication limitation problem faced by the current maritime area detection, this paper proposes a maritime area detection scheme based on cloud-side collaboration. The scheme solves the problem of increased latency caused by communication limitations from the following two aspects. First, the edge computing nodes need to be deployed on the gateway ship side, so that when the gateway ship collects the data collected by the UAV, it can process some of the data, and therefore reduce the amount of data transmission from the gateway ship to the cloud center as a way to alleviate the communication limitation problem. Secondly, the introduction of low-orbit satellites in this program, low-orbit satellites are close to the ground, which can greatly reduce the data propagation delay, and low-orbit satellites have small path loss and high data transmission rate, which can further alleviate the problem of communication limitation. The core idea of the program is to use arithmetic resources to make up for the problem of limited bandwidth resources. It should be noted that the data processing capacity of the gateway ship side is also limited, so this scheme also faces the same problem of limited arithmetic power. If the gateway ship processes the data completely locally, it may cause the local processing delay of the gateway ship side to increase due to the limited processing capacity of the gateway ship side, which ultimately affects the processing delay of the whole task. If the gateway ship offloads the data completely to the cloud, it may cause a delay increase problem due to the limitation of network bandwidth, so it is necessary to offload part of the data measured by the gateway ship to the cloud for processing, which also indicates that the arithmetic power collaboration between the cloud center and the gateway ship is necessary.
The scenario of the program is shown in Figure 1. In it, the UAV can be used as a terminal, whose task is to collect relevant monitoring data by utilizing various types of sensor devices it carries. The gateway ship side can be viewed as an edge cloud by deploying edge servers, and therefore can provide part of the data processing and storage capabilities. The LEO satellite is mainly used as a relay for data transmission to realize the data communication between the shore-based cloud and the gateway ship at sea. The cloud center is located at the shore, which can provide powerful data processing and storage capabilities. Therefore, the cloud-side collaboration in this scenario refers to the collaborative data processing between the gateway ship and the shore-based cloud center.
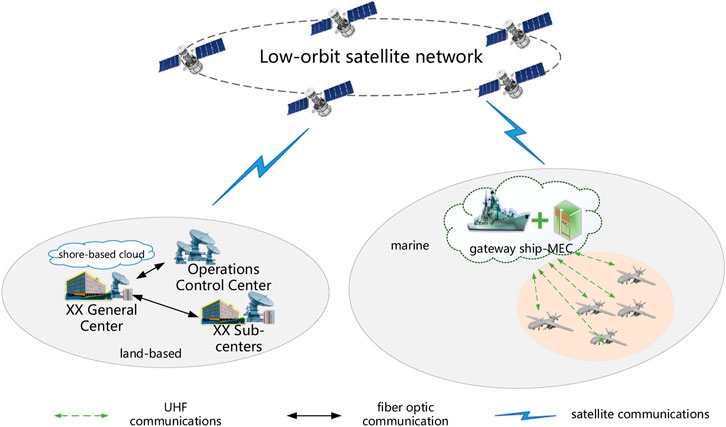
Figure 1. Cloud-side collaboration-based maritime area detection scheme.
The following is the business processing flow of the maritime area detection scheme based on cloud-side collaboration, which mainly consists of six parts: 1) the gateway ship collects the data collected by each UAV through UHF communication; 2) the gateway ship calculates the optimal offloading scheme and divides the total collected data into two parts, and one part of the data completes the data processing on the local gateway ship side; 3) the gateway ship forwards the remaining data to the remote cloud center through the low orbit satellite network; 4) the ground cloud center processes the data sent by the gateway ship; 5) the gateway ship completes the data processing and sends the results to the ground cloud center through the low-orbit satellite network; 6) the cloud center synthesizes the results of the processing of the various parts and gives the final decision.
First, the gateway ship needs to collect data from the UAVs, and the amount of data collected by each UAV
Ultra-short wave communication is used between the UAV and the gateway ship, and its data propagation delay is negligible due to the relative proximity of the UAV and the gateway ship.
The gateway ship collects data from multiple UAVs, and N is the total number of UAVs, at which point the total amount of data pooled by the gateway ship is
Where
Since LEO satellites are located at a distance of about
Simplify Equation 2 and define the unloading factor as
Where
Therefore, the data processing delay on the ship side of the gateway is:
The gateway ship needs to send the data of size
The satellite needs to send the data to the cloud center via downlink with a transmission rate of
There is still a propagation delay in the above process, which has a value of approximately
The center cloud receives the data and starts processing the data with its data processing latency:
Note that after the gateway ship has processed some of the data, it needs to transmit the result to the cloud center, whose latency can be ignored because the amount of data to process the result is very small. Considering that the gateway ship and the center cloud can process the user’s data in parallel, the total delay of their task processing is:
In this section, the validity of the proposed scheme is verified. Firstly, the simulation parameters are set and then each validation process is described. Finally, the effectiveness of the proposed algorithm is verified by comparing the experimental results.
In this section, we will give some common simulation parameter settings. Specifically, the radius of the detection range of the UAV is about 14 km [19], take the radius of the detection range of 28 km as an example, 4 UAVs are needed to perform the detection task, the data volume collected by the UAV is about 16 Mbit [20]. The distance from the ground to the low-orbit satellite is about 1,150 km [21], and the propagation speed of the satellite communication is 3 × 108 m/s [22]. The more detail of simulation parameters is given in Table 1.
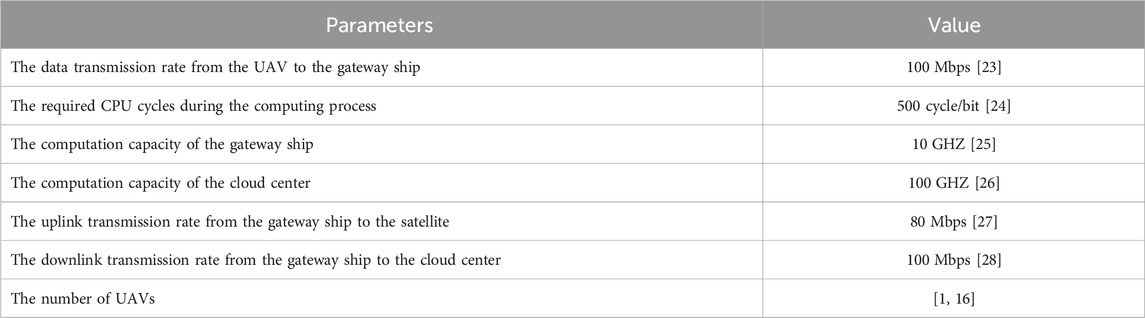
Table 1. Parameters of simulation.
Based on the above description of the scheme, the performance of the proposed scheme needs to be validated, and here the delay is selected as the validation index, so it is necessary to calculate the delay of each part of the business processing. The validation process of the maritime area detection scheme based on cloud-edge collaboration is given below, which mainly includes the following steps:
Calculating the data collection latency: the communication between the UAV and the gateway ship is based on ultra-shortwave communication, and the communication rate is known. Each UAV has a fixed detection range, the video collected by the UAV is determined based on a combination of the collected image resolution (pixels), color depth (bits), and frame rate, and the amount of data collected by the UAV is also known. Based on the above information, the transmission delay for the UAV to upload the data to the gateway ship can be calculated. The delay is the ratio of the data volume to the transmission rate.
Calculating the optimal offloading ratio: In the cloud-edge collaboration scheme, in order to improve the efficiency of processing data, both the gateway ship and the cloud center need to process a certain proportion of the data, and this offloading ratio is optimal only if the cloud center and the gateway ship complete the data processing at the same moment as far as possible, for this reason, it is necessary to adjust the offloading ratio so that the latency of the data processing at the edge of the gateway ship is equal to the total latency of offloading part of the data to the cloud for processing. To have a higher efficiency.
Calculation of data offloading delay: Gateway ships need to upload part of the data via LEO satellites to the shore-based cloud for processing. It should be noted that the gateway ship needs to take into account the delay of each part of the satellite in data offloading, including the uplink delay, downlink delay and propagation delay. Among them, the uplink delay is the delay between the gateway ship and the LEO satellite, which can be expressed as the ratio of the unloaded data volume to the uplink transmission delay; the downlink delay is the delay between the LEO satellite and the cloud center, which can be expressed as the ratio of the unloaded data size to the downlink transmission rate; the propagation delay is related to the distance between the LEO satellite and the gateway ship, and the delay can be expressed as the ratio of the distance to the speed of light. In summary, the offloading delay of the data can be derived, which is the sum of the above three parts of the delay.
Calculating the data processing delay: both the gateway ship and the cloud center need to process some of the data. In data processing, images need to be recognized, analyzed, etc. For this task type, it is necessary to determine the arithmetic resources required for each unit of the data volume of the task, therefore, after the size of each part of the processed data is known, its data processing delay can be expressed as the ratio of the total computational resource demand of the task to the capacity of the computational node. Where the total computational resource requirement is the product of the total data volume of the task and the arithmetic resources required per unit of data volume.
Calculate the total processing delay of the task: note that after the gateway ship has processed some of the data, it needs to transmit the result to the cloud center, and its delay can be ignored because the amount of data to process the result is very small. Considering that the gateway ship and the center cloud can process the user’s data in parallel, the total delay of its task processing should be larger of the total data processing delay of the gateway ship side and the total data processing delay of the cloud center. Among them, the total data processing delay on the gateway ship side is mainly the delay of the gateway ship utilizing local arithmetic power for data processing. The total data processing delay of the cloud center includes the data offloading delay and the data processing delay of the cloud center.
The UAV performs the maritime area detection mission by first using the sensors and equipment carried by the UAV itself to effectively and comprehensively detect the target area, then pooling the collected data through the gateway ship and uploading the data to the shore-based command post for data processing through satellite communications to obtain information about maritime activities for to provide decision support to the command center. To verify the effectiveness of the regional detection program based on cloud-side collaboration, the following objectives need to be verified.
1) Coverage range and latency: as the detection range increases, the processing latency of the data increases, the main reason for this is that a larger detection range needs to be accomplished by more than one UAV, and with the increase in the number of UAVs, the gateway ship-side collection of data from the UAVs increases and is sent to the shore-based cloud, and this process increases the processing latency of the data. To validate the above process, it is necessary to increase the coverage range and then calculate the total latency of the business processing, observe the relationship between the coverage range of the detection area and the latency, and expect to achieve the following results, as shown in Figure 2.
2) Performance comparison of different schemes: to verify the effectiveness of the proposed area detection scheme based on cloud-side collaboration, it is necessary to analyze the data processing latency under different schemes. For this purpose, different target area coverage radii need to be adjusted to calculate the total delay of business processing, and the following results are expected to be achieved, as shown in Figure 3. The original scheme refers to the gateway ship pooling the data collected by UAVs and then transmitting them to the cloud center for data processing via high-orbit satellites; the improved scheme refers to the scheme proposed in this paper, i.e., deploying an edge computing node on the side of the gateway ship, completing the data processing of a portion of the data collected by the gateway ship at the local gateway ship through the optimal offloading ratio, and the remaining data being forwarded to the cloud center through the low-orbit satellite network for data processing. Under the same coverage, the proposed scheme greatly reduces the data processing latency and meets the latency requirements for monitoring different ranges, thus saving valuable time for detection.
3) Cloud computing capability and data processing: we investigate the relationship between the performance of cloud servers and the amount of data processed by the servers. We assume that the computing power of edge nodes remains unchanged. With the improvement of cloud computing capabilities, the total processed data volume of the cloud will continue to increase, but the total processed data volume of edge nodes will continue to decrease, as shown in Figure 4. We can conclude that the computing power of nodes affects the proportion of data processing. This is because as cloud computing capabilities improve, the computing performance advantage of edge nodes will gradually decrease.
4) Cloud Computing Capability and System Latency: As shown in Figure 2, we analyze the impact of cloud computing capability on system latency. We fix the data processing capability of edge nodes. With the improvement of cloud computing capabilities, the data processing latency of the system will continue to decrease and tend toward balance, as shown in Figure 5. The main reason is that the latency of data processing is inversely proportional to the data processing capability, but the latency of data processing is also affected by network transmission performance. When the computing performance reaches a certain level, network transmission capacity will become the main factor affecting the total latency.
5) Optimal task offloading ratio: when designing the cloud-side collaboration scheme, the task processing ratio between the cloud center and the gateway ship is extremely critical, to verify this conclusion, the detection range can be set to 28 km, the offloading ratio can be adjusted, and the service processing delay under different offloading ratios can be calculated and expected to reach the following results, as shown in Figure 6. From the figure, it can be seen that the proposed scheme can achieve optimal performance when the offloading ratio is about 0.5. If the tasks are all processed on the gateway ship or completely offloaded to the cloud for processing, the monitoring delay requirement may not be guaranteed, which also shows the necessity of cloud-side collaboration.
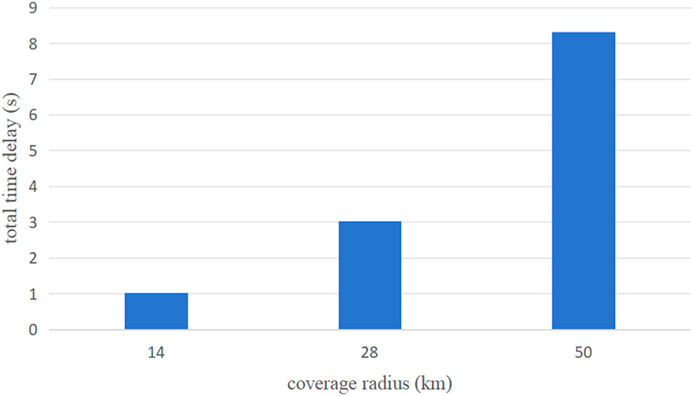
Figure 2. Relationship between coverage and delay.
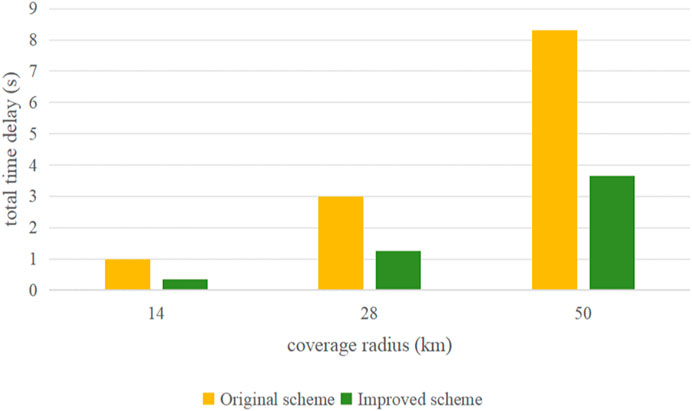
Figure 3. Comparison of different programs.
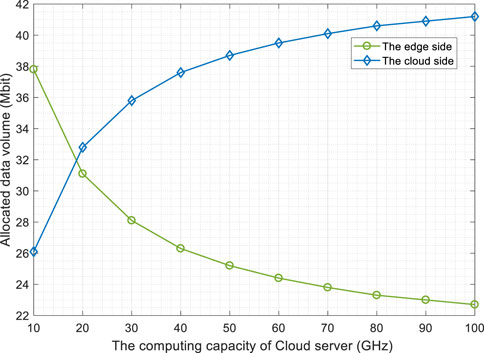
Figure 4. The impact of cloud computing capability on data processing.
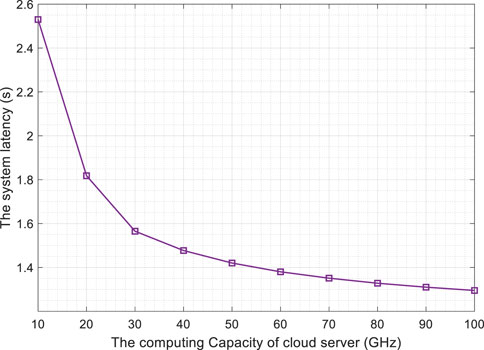
Figure 5. The impact of cloud computing capability on the system latency.
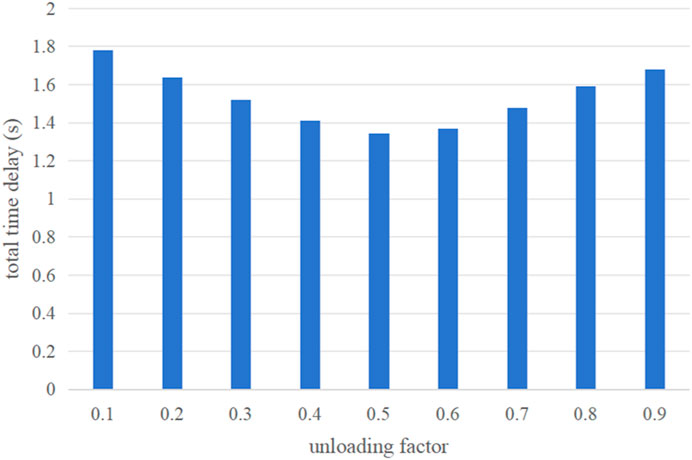
Figure 6. Performance comparison of schemes with different unloading ratios.
In this paper, we propose a cloud-edge collaboration-based maritime area detection scheme that addresses the current problem of increased latency due to limited communication from two aspects. One of the aspects is to deploy the edge computing nodes on the ship side of the gateway. On the other hand, low-orbit satellites can also be used instead of high-orbit satellites to shorten the communication distance. In this paper, the effectiveness of the maritime area detection scheme based on cloud-edge collaboration is also experimentally verified by using the time delay as a calculation index.
The original contributions presented in the study are included in the article/Supplementary material, further inquiries can be directed to the corresponding author.
YL: Writing–original draft, Writing–review and editing, Software, Supervision. BW: Formal Analysis, Writing–original draft. YX: Writing–original draft, Writing–review and editing, Conceptualization, Data curation, Formal Analysis, Methodology. HX: Funding acquisition, Project administration, Writing–original draft.
The author(s) declare that no financial support was received for the research, authorship, and/or publication of this article.
Author YL was employed by company Beijing Spaceiot Technology Development Co., Ltd.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
1. Yuan S, Li Y, Bao F, Xu H, Yang Y, Yan Q, et al. Marine environmental monitoring with unmanned vehicle platforms: present applications and future prospects. Sci Total Environ (2023) 858:159741. doi:10.1016/j.scitotenv.2022.159741
2. Wang Z, Yang T, Zhang H. Land contained sea area ship detection using spaceborne image. Pattern Recognition Lett (2020) 130:125–31. doi:10.1016/j.patrec.2019.01.015
3. Nie W, Han ZC, Zhou M, Xie LB, Jiang Q. UAV detection and identification based on WiFi signal and RF fingerprint. IEEE Sensors J (2021) 21(12):13540–50. doi:10.1109/jsen.2021.3068444
4. Dong Y, Ma Y, Li Y, Li Z. High-precision real-time UAV target recognition based on improved YOLOv4. Comp Commun (2023) 206:124–32. doi:10.1016/j.comcom.2023.04.019
5. Canello G, Mignardi S, Mikhaylov K, Buratti C, Hänninen T. Data collection from LoRaWAN sensor network by UAV gateway: design, empirical results and dataset. In: 2023 Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit); July 2023; Gothenburg, Sweden. IEEE.
6. Pirmagomedov R, Kirichek R, Blinnikov M, Koucheryavy A. UAV-based gateways for wireless nanosensor networks deployed over large areas. Comp Commun (2019) 146:55–62. doi:10.1016/j.comcom.2019.07.026
7. Zhou H, Wang X, Zhong S. A satellite orbit maneuver detection and robust multipath mitigation method for GPS coordinate time series. Adv Space Res (2023). doi:10.1016/j.asr.2023.08.006
8. Bajaj K, Sharma B, Singh R. Implementation analysis of IoT-based offloading frameworks on cloud/edge computing for sensor generated big data. Complex Intell Syst (2022) 8(5):3641–58. doi:10.1007/s40747-021-00434-6
9. Xu X, Gu R, Dai F, Qi L, Wan S. Multi-objective computation offloading for internet of vehicles in cloud-edge computing. Wireless Networks (2020) 26:1611–29. doi:10.1007/s11276-019-02127-y
10. Liu S, Tian J, Zhai C, Li T. Joint computation offloading and resource allocation in vehicular edge computing networks. Digital Commun Networks (2022) 9:1399–410. doi:10.1016/j.dcan.2022.12.002
11. Liu X, Du X, Zhang S, Han D. Cooperative computing offloading scheme via artificial neural networks for underwater sensor networks. Appl Sci (2023) 13(21):11886. doi:10.3390/app132111886
12. Hua W, Liu P, Huang L. Energy-efficient resource allocation for heterogeneous edge-cloud computing. IEEE Internet Things J (2023) 11:2808–18. doi:10.1109/jiot.2023.3293164
13. Han P, Liu Y, Zhang X, Guo L. Energy-efficient service placement based on equivalent bandwidth in cell zooming enabled mobile edge cloud networks. IEEE Trans Vehicular Tech (2022) 71(11):12275–90. doi:10.1109/tvt.2022.3194543
14. Shen B, Lin J, Jia Y. Data-driven urban rail vehicle critical parts maintenance system based on cloud-edge collaboration. J Phys : Conf Ser (2023) 2649(1):012057. doi:10.1088/1742-6596/2649/1/012057
15. Fei Z, Zhou H, Wang K. Cloud-edge collaboration based methods in improving the safety inspection efficiency on electric operation scenes. J Phys : Conf Ser (2023) 2584(1):012026. doi:10.1088/1742-6596/2584/1/012026
16. Chen G, Chen Y, Mai Z, Hao C, Yang M, Du L. Incentive-based distributed resource allocation for task offloading and collaborative computing in MEC-enabled networks. IEEE Internet Things J (2022) 10(10):9077–91. doi:10.1109/jiot.2022.3233026
17. Hu H, Wu D, Zhou F, Zhu X, Hu RQ, Zhu H. Intelligent resource allocation for edge-cloud collaborative networks: a hybrid DDPG-D3QN approach. IEEE Trans Vehicular Tech (2023) 72:10696–709. doi:10.1109/tvt.2023.3253905
18. Su Q, Zhang Q, Li W, Zhang X. Primal-dual-based computation offloading method for energy-aware cloud-edge collaboration. IEEE Trans Mobile Comput (2023) 1–15. doi:10.1109/tmc.2023.3237938
19. Li J, Zhang G, Zhang X, Zhang W. Integrating dynamic event-triggered and sensor-tolerant control: application to USV-UAVs cooperative formation system for maritime parallel search. IEEE Trans Intell Transportation Syst (2023) 1–13. doi:10.1109/tits.2023.3326271
20. Xu G, Yang Z, Liu H. Pursuit and evasion game between UVAs based on multi-agent reinforcement learning. In: 2019 Chinese Automation Congress (CAC); November 2019; Hangzhou, China. IEEE.
21. Yong D, Song J, Dayang W, Yang B, Huichen X, Jincheng Z. A stk-based constellation architecture implementation for 5g low-orbit satellites. In: 2022 IEEE 4th International Conference on Power, Intelligent Computing and Systems (ICPICS); September 2022; Shenyang, China. IEEE.
22. Qi Y, Meng W, Zeng C, He Q, Xu G, Wen X. Influence of Co-frequency interference on transmission performance in satellite communication. In: 2023 8th International Conference on Communication, Image and Signal Processing (CCISP); November 2023; Chengdu, China. IEEE.
23. Du P, Shi Y, Zeng Q, Zhang X. Joint trajectory design and transmit power control in NOMA-aided UAV communication systems. In: 2022 International Conference on Computing, Communication, Perception and Quantum Technology (CCPQT); August 2022; Xiamen, China. IEEE.
24. Farooq MO. Priority-based servicing of offloaded tasks in mobile edge computing. In: 2021 IEEE 7th World Forum on Internet of Things (WF-IoT); June 2021; New Orleans, LA, USA. IEEE.
25. Wang B, Tong F, Huang D. A joint computation offloading and resource allocation strategy for LEO satellite edge computing system. In: 2020 IEEE 20th International Conference on Communication Technology (ICCT); December 2020; Nanning, China. IEEE.
26. Tang Z, Zhou H, Ma T, Yu K, Shen XS. Leveraging LEO assisted cloud-edge collaboration for energy efficient computation offloading. In: 2021 IEEE Global Communications Conference (GLOBECOM); February 2021; Madrid, Spain. IEEE.
27. Hui LZ, Yang GQ. Uplink user power control for low-orbit satellite communication systems. In: 2018 IEEE 4th International Conference on Computer and Communications (ICCC); December 2018; Chengdu, China. IEEE.
Keywords: game theory, cloud edge collaboration, maritime regional exploration, low-orbit satellites, edge computing
Citation: Li Y, Wang B, Xu Y and Xu H (2024) Game theory based maritime area detection for cloud-edge collaboration satellite network. Front. Phys. 12:1387709. doi: 10.3389/fphy.2024.1387709
Received: 18 February 2024; Accepted: 15 April 2024;
Published: 07 May 2024.
Edited by:
Jianrong Wang, Shanxi University, ChinaReviewed by:
Yunyun Yang, Taiyuan University of Technology, ChinaCopyright © 2024 Li, Wang, Xu and Xu. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Haitao Xu, eHVoYWl0YW9AdXN0Yi5lZHUuY24=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.