 Hu Cheng
Hu Cheng Xin-Chi Yan
Xin-Chi Yan Li Fu
Li Fu
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Phys. , 23 June 2021
Sec. Interdisciplinary Physics
Volume 9 - 2021 | https://doi.org/10.3389/fphy.2021.714381
This article is part of the Research Topic Advanced Sensing, Materials and Intelligent Algorithms for Multi-Domain Structural Health Monitoring View all 23 articles
In this study, safety margin explicit equation has been established using random variables (i.e., the engineering conditions, structure parameters, structural strength, and external load), and the genetic algorithm (GA)–based structural reliability optimization design has been addressed subsequently. Though the conventional adaptive GA can change automatically with fitness, it is still not unsatisfactory in sufficiently improving the algorithm convergence speed, especially for complex structures. This article presents an improved adaptive technology termed as the distant relative genetic algorithm (DRGA), in which the distant relative pointer and immunity operators can effectively improve the search performance of the GA. In early evolution, by means of cross controlling and avoiding pairing between individuals with the same genes, the methodology prevents the isogenic individuals expanding locally. Besides, the revised algorithm is able to jump out of the local optimal solution, thus ensuring the realization of a fast global convergence. An example based on wing box structure optimization has been demonstrated using the improved method, and the calculation results show that this strategy makes the GA more effective in dealing with the constraint optimization issues.
With the rapid development of large and complex structures, more and more attention has been paid to the structural safety, such as the structural control and health monitoring [1, 2], the long-term performance deterioration [3, 4], and the structural optimization [5, 6], where the reliability-based structural optimization (RBSO) with multiple stochastic variables is always a difficult problem [7]. The weight and material cost of a structure can be effectively reduced by selecting the structural reliability index as the constraint of the optimization problem and adopting the element cross-sectional area, length, strength, and external load as the stochastic variables. Meanwhile, the structure strength, stiffness, and resistance to vibration and stability can also be improved. An optimized RBSO design, which is beneficial to make structures meet the requirements of economy and safety, has essential application value.
In the past few decades, much attention has been paid to the standard genetic algorithm (SGA) [8, 9]. However, since actual structures are usually large-scale and complicated, shortcomings such as premature convergence and poor computational efficiency frequently appear when the SGA is applied to the RBSO [10]. The above limitations make many researchers and engineers doubt about whether the genetic algorithm (GA) can be applied to the optimization design for actual structures [11].
The selection, crossover, and mutation operations of the GA are random, which ensure the evolution of population. The individual degradation phenomenon, however, appears due to the arrangement of the algorithm. Crossover and mutation probabilities are the two genetic parameters that are key to the performance of the GA. Srinivas and Patnaik [12] proposed that the adaptive genetic algorithm (AGA) can change automatically with fitness. But, the conventional AGA methodology is still unsatisfactory in sufficiently improving the algorithm convergence speed.
To deal with such aforementioned drawbacks, an improved adaptive technology, termed as the distant relative genetic algorithm (DRGA), is proposed in this study. In the following, the element safety margin function and system failure analysis are introduced, focusing on the optimization problem of an ideal elastic–plastic beam–slab structure system. Then the improved adaptive technology is presented, followed by the detailed operation process. After that, a wing box structure is taken as the numerical example for the validation of the proposed method, and finally, conclusions are drawn.
An ideal elastic–plastic beam–slab structure system is focused on for the optimization problem. The considered material parameters are mainly the strength and elastic modulus. As for the geometrical parameter, it includes the slab (i.e., the length, width, and thickness) and the beam (the area, length, and moment of inertia).
The safety margin of the slab element can be expressed as follows:
where
where
Let
where
It can be seen that the safety margin of the slab element
When any left end section of the beam element fails, the safety margin of the beam can be determined by adopting the criterion of linear approximation as follows:
where
where
In a similar way, the safety margins can also be deduced when the right end section of the beam fails to
When the components of the system fail, the stress redistribution will occur to the structure. The reduced stiffness matrix of system members must be reconsidered. Once the number of failed components reaches to a particular number
where
Structure fails means that the structure turns into machinery. In order to calculate the system reliability index, all failure modes or integrated failure paths should be identified, but it is impossible and unnecessary in the analysis for complex structures. Alternatively, the typical failure modes can be adopted. The branch-and-bound method [14] is regarded as a proper approach to identify the typical failure modes. By boundary function operations, the number of subsystems can be reduced for structural reliability analysis. When all typical failure modes are identified, the system reliability index can be figured out by using the probability network evaluation technique [15]:
where
The typical adaptive strategy makes the crossover probability
where
The sufficient conditions of a global optimization ability are as follows: 1) a local search ability and 2) the ability of suddenly jumping from one local optimization to the next better one. However, the local search ability of the conventional AGA is inefficient in the early evolution because the optimal individual in the population almost does not change. Meanwhile, in the later evolution process, the optimal individual does not have the capability to jump out of the local optimal solution, leading to local convergence rather than global convergence eventually.
According to Eqs. 8, 9, when the population tends to be consistent, the AGA tends to increase pc and pm. However, in fact the consistence may be caused by any super individual existing in the population. Selecting operation may cause these individuals to overwhelm repeatedly in the new generations of population. An important consequence of this is a destroyed diversity of the population and consequently a premature convergence. The AGA alone cannot accommodate this phenomenon that once an overwhelming individual exists in the population, increasing pc cannot generate new models nor make the calculation jump out of the local optimal solution. On the other hand, increasing the variability (e.g., the pm) of the AGA may cause the algorithm to degrade into random search with fewer poor individuals depending on variability. Accordingly, convergence in this case is inefficient and unstable.
In order to enhance the global optimization ability of the GA, individual expansion phenomenon must be mitigated, which has to be done at the early cross operation. Setting distant relative pointer is essential, and the detailed calculation process is performed as follows.
Assume that the population is denoted by
The proposed distant relative pointer can effectively avoid any individual to dominate in the population. Meanwhile, the best individuals will not be damaged. This strategy has the capability to generate a new model, and the overall operation is simple. The algorithm also assures a diversity of the population, and at the same time, it is able to avoid local optimization and ensure the global convergence of the GA.
In order to prevent an individual from degenerating in basic operations via the GA, the immunity operator is adopted, which consists of a vaccine inoculation and immunity selection.
A vaccine is a basic indicator of the specific question involved. In the RBSO, a vaccine can be a calculation result or a theoretical deduction. Figure 1 shows a scheme of the extraction and inoculation processes. Assume the t th generation is being calculated, the corresponding population is
where
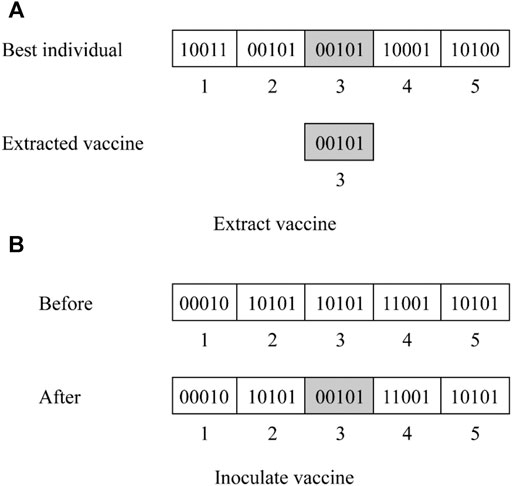
FIGURE 1. Schematic diagram for the extraction and inoculation processes.
The individuals that have been inoculated with the vaccine will be inspected subsequently. If their fitness is worse than that of the last generation, they will be replaced by their “fathers.” If their fitness is better than that of the last generation, it means the inoculation is successful. The appeared new optimal individual will be selected in the new generation.
Based on the above research, this article presents a distant relative genetic algorithm (DRGA) method to solve the RBSO question. Figure 2 shows the flowchart of the computer program, and the significant procedures are performed as follows.
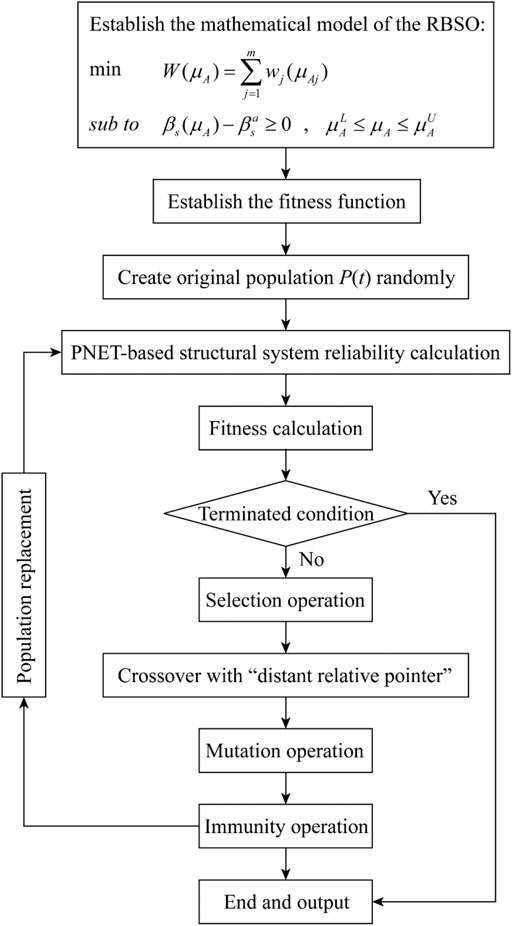
FIGURE 2. Flowchart of the DRGA method.
In this step, constraints function must be expressed definitely. For an RBSO question, it is usually expressed as
Lagrange multiplier method [16] is adopted to deduce the fitness function, which can be expressed as follows:
where F is the fitness value, C is a large constant, which can be adopted as 1.25 times the mass of the structural system when all design variables equal the maximum values, W is the structural mass,
After deducing the safety margin explicit equation, the branch-and-bound method is adopted to search the main failure modes, and the probabilistic network evaluation technique (PNET) is adopted to calculate the system reliability index.
Except for the first three primary operators, the immunity operator and distant relative pointer are necessary to be created in this method, and then an efficient GA iterative loop is established accordingly. The method searches a global optimal solution by loop calculating until the convergence criterion is satisfied. Two conditions can be adopted to terminate the calculation process. First, the difference between the results of two sequential calculations is small enough (e.g., less than 0.0001). Alternatively, enough loop iterations have been made (e.g., the iteration number exceeds 100).
The improved adaptive immune system is built based on the improved adaptive methodology and the introduced immunity operator and distant relative pointer. The simulative aircraft wing box structure, which is an ideal spatial beam–slab structure system, is taken as a typical example to verify the proposed DRGA method. The reliability-based structural optimization is calculated using the improved strategy as follows.
Figure 3 displays the finite element model (FEM) of a simulative aircraft wing box. The allowable stress is 66.89 kN/cm2, and the coefficient of variation (Cov) for the element resistance is 0.05. The elastic and shear modulus of the material are 6,689 and 2,300 kN/cm2, respectively. The density of the material is adopted as 2,700 kg/cm3. All these above parameters are constant in the calculation process. In addition, the average of the external load is 44.45 kN, and the corresponding Cov is 0.2.
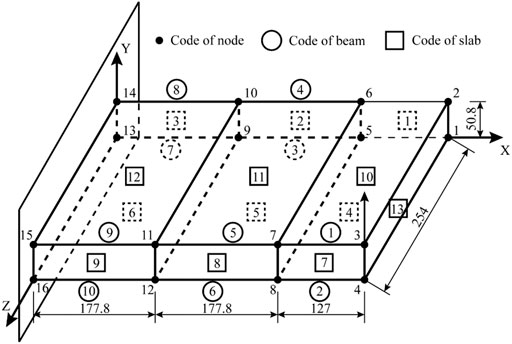
FIGURE 3. Wing box structure (mm).
As shown in Figure 3, the FEM of the wing box consists of 10 beam elements and 13 slab elements. Let Ai be the cross-sectional area of the beam element, and it varies from 0.5 to 15 cm2. The thickness of the slab element is denoted by Bi, which ranges from 0.1 to 0.8 cm. The resistance of components is independent to each other. The system reliability is limited by
The RBSO question can be illustrated as follows:
where W is the structural mass, Li is the length of beam i, Mi is the area of slab i, and
According to Eq. 11, C can be determined as 910.4 kg when Ai and Bi equal the maximum values. Accordingly, the fitness function (Eq. 11) turns into the following:
Real number coding is adopted in the calculation, and the individual length is 23. The population size is selected as 30. The circle terminates when the genetic evolution generation runs up to 110. The selection method adopts fitness proportion roulette. The optimization results of the wing box structure are summarized in Tables 1, 2, including the cross-sectional areas of beams and the thicknesses of slabs.

TABLE 1. Optimized cross-sectional areas of beams.
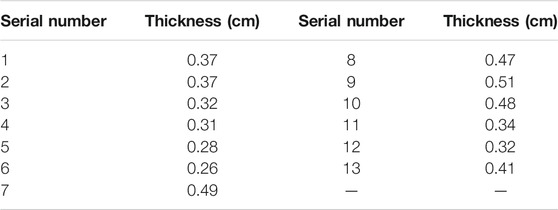
TABLE 2. Optimized thicknesses of slabs.
After optimization, the system reliability index is 3.5. The mass of the system is 302.47 kg, while the original assumed mass of the structure (Ai = 15 cm2; Bi = 0.8 cm) is 728.32 kg. It indicates that the overall mass of the system is decreased by 425.85 kg via optimization, which ensures the system 58.5% lighter.
In order to analyze the performance of the proposed algorithm, the optimization statistical diagram obtained by the DRGA is compared with that obtained by the SGA, as shown in Figure 4. It is obvious that the average fitness is attained earlier based on the DRGA, which means a higher convergence efficiency.
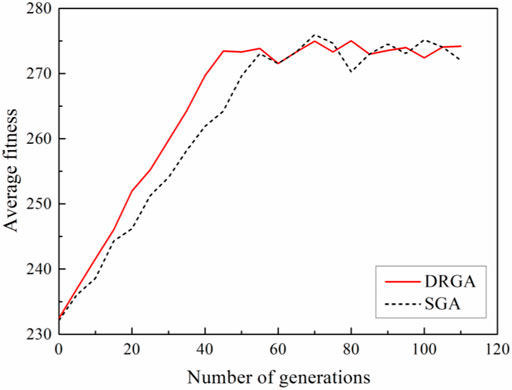
FIGURE 4. Average fitness of every generation.
This article mainly proposes an improved adaptive technology, termed as the distant relative genetic algorithm (DRGA), to enable the genetic algorithm (GA) to jump out of the local optimal solution, overcoming its associated precocious shortcoming and making a fast and stable convergence. A wing box structure is taken as the example to verify the proposed method. The results demonstrate that a more stable average fitness can be achieved earlier after introducing the distant relative control to the adaptive genetic algorithm, compared to the conventional standard genetic algorithm (SGA). Besides, the control of cross in the early genetic operations by the distant relative pointer can effectively avoid individual expansion, enabling the algorithm to jump out of local optimal solution and increase local search ability. A better global convergence and convergence efficiency have been achieved as a consequence.
The original contributions presented in the study are included in the article/supplementary material; further inquiries can be directed to the corresponding author.
Conceptualization: HC and X-CY. Methodology: X-CY. Software: HC and X-CY. Formal analysis: LF. Data curation: X-CY. Writing—original draft preparation: HC and X-CY. Writing—review and editing: HC and LF. Project administration: X-CY. Funding acquisition: HC. All authors have read and agreed to the published version of the manuscript.
This research is supported by the National Natural Science Foundation of China (Grant No. 52008186), the Natural Science Foundation of Jiangsu Province (Grant No. BK20200605), the Scientific Research Fund of Institute of Engineering Mechanics, China Earthquake Administration (Grant No. 2019D08), the Open Fund of State Key Laboratory of Coastal and Offshore Engineering, Dalian University of Technology (Grant No. LP2011), and the Fundamental Research Funds for the Central Universities (JUSRP12043). The authors greatly appreciate the financial supports.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
1. Qu CX, Li HN, Huo LS, Yi TH. Optimum Value of Negative Stiffness and Additional Damping in the Civil Structures. J Struct Eng (2017) 143(8):04017068. doi:10.1061/(asce)st.1943-541x.0001805
2. Qu CX, Yi TH, Li HN. Mode Identification by Eigensystem Realization Algorithm through Virtual Frequency Response Function. Struct Control Health Monit (2019) 26(10):e2429. doi:10.1002/stc.2429
3. Cheng H, Li H-N, Yang YB, Wang D-S. Seismic Fragility Analysis of Deteriorating RC Bridge Columns with Time-Variant Capacity index. Bull Earthquake Eng (2019) 17(7):4247–67. doi:10.1007/s10518-019-00628-x
4. Cheng H, Wang DS, Li HN. Investigation on Ultimate Lateral Displacements of Coastal Bridge Piers with Different Corrosion Levels along Height. J Bridge Eng (2021) 26(4):04021015. doi:10.1061/(asce)be.1943-5592.0001696
5. Sajedi S, Huang Q. Reliability-based Life-Cycle-Cost Comparison of Different Corrosion Management Strategies. Eng Structures (2019) 186:52–63. doi:10.1016/j.engstruct.2019.02.018
6. Mishra M, Keshavarzzadeh V, Noshadravan A. Reliability-based Lifecycle Management for Corroding Pipelines. Struct Saf (2019) 76:1–14. doi:10.1016/j.strusafe.2018.06.007
7. Santoro R, Muscolino G, Elishakoff I. Optimization and Anti-optimization Solution of Combined Parameterized and Improved Interval Analyses for Structures with Uncertainties. Comput Structures (2015) 149:31–42. doi:10.1016/j.compstruc.2014.11.006
9. Goldberg DE. Computer-aided Gas Pipeline Operation Using Genetic Algorithms and Rule Learning. Ann Arbor, MI: Department of Civil Engineering, University of Michigan (1983).
10. Luo Y, Kang Z. Layout Design of Reinforced Concrete Structures Using Two-Material Topology Optimization with Drucker-Prager Yield Constraints. Struct Multidisc Optim (2013) 47(1):95–110. doi:10.1007/s00158-012-0809-1
11. Barone G, Frangopol DM. Life-cycle Maintenance of Deteriorating Structures by Multi-Objective Optimization Involving Reliability, Risk, Availability, Hazard and Cost. Struct Saf (2014) 48:40–50. doi:10.1016/j.strusafe.2014.02.002
12. Srinivas M, Patnaik LM. Adaptive Probabilities of Crossover and Mutation in Genetic Algorithms. IEEE Trans Syst Man Cybern (1994) 24(4):656–67. doi:10.1109/21.286385
13. Yan XC, An WG, Chen WD. Reliability Analysis for Large-Scale Ship Structure. J Harbin Eng Univ (2004) 25(2):147–52. (in Chinese).
14. Thoft-Christensen P, Murotsu Y. Application of Structural Systems Reliability Theory. Berlin: Spinger Press (1986). doi:10.1007/978-3-642-82764-8
Keywords: reliability-based structural optimization, genetic algorithm, wing box structure, distant relative pointer, immunity operator
Citation: Cheng H, Yan X-C and Fu L (2021) Distant Relative Genetic Algorithm–Based Structural Reliability Optimization. Front. Phys. 9:714381. doi: 10.3389/fphy.2021.714381
Received: 25 May 2021; Accepted: 04 June 2021;
Published: 23 June 2021.
Edited by:
Yang Zhang, Dalian University of Technology, ChinaReviewed by:
Ying Ma, North China University of Water Conservancy and Electric Power, ChinaCopyright © 2021 Cheng, Yan and Fu. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Xin-Chi Yan, c2t5d2Fsa2VyQGppYW5nbmFuLmVkdS5jbg==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.