 Yu Qi
Yu Qi Jiajun Chen
Jiajun Chen Yueming Wang
Yueming Wang
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
PERSPECTIVE article
Front. Neurosci., 12 May 2023
Sec. Neuroprosthetics
Volume 17 - 2023 | https://doi.org/10.3389/fnins.2023.1153985
This article is part of the Research TopicBrain Functional Analysis and Brain-like IntelligenceView all 11 articles
Brain-machine interfaces (BMI) have developed rapidly in recent years, but still face critical issues such as accuracy and stability. Ideally, a BMI system would be an implantable neuroprosthesis that would be tightly connected and integrated into the brain. However, the heterogeneity of brains and machines hinders deep fusion between the two. Neuromorphic computing models, which mimic the structure and mechanism of biological nervous systems, present a promising approach to developing high-performance neuroprosthesis. The biologically plausible property of neuromorphic models enables homogeneous information representation and computation in the form of discrete spikes between the brain and the machine, promoting deep brain-machine fusion and bringing new breakthroughs for high-performance and long-term usable BMI systems. Furthermore, neuromorphic models can be computed at ultra-low energy costs and thus are suitable for brain-implantable neuroprosthesis devices. The intersection of neuromorphic computing and BMI has great potential to lead the development of reliable, low-power implantable BMI devices and advance the development and application of BMI.
Brain-machine interface (BMI) is a technology that enables direct interaction between the brain and external devices such as cursors, robotic arms, and prosthetic limbs, which has demonstrated great potential in various applications, including gaming, smart homes, and neural or motor rehabilitation (Hochberg et al., 2012).
Most recently, intracortical brain-machine interfaces (iBMI), which decode information from single-neuron-level neural signals, have seen rapid progress and enabled new forms of neuroprosthesis, such as brain-to-handwriting (Willett et al., 2021), BMI-based speech synthesis (Moses et al., 2021), and implantable neural therapies for epilepsy (Berényi et al., 2012) and depression (Scangos et al., 2021). The emergence of BMI technology companies, represented by Neuralink, has sparked a wave of rapid development of brain-implantable hardware and devices, boosting the clinical application of BMIs.
Ideally, an iBMI system would take the form of brain-implantable neuroprosthesis and would work collaboratively with the brain, like an extension of the brain (Wu et al., 2016). The brain and the iBMI-based neuroprosthesis should be closely connected and integrated, with both sides adapting to, learning with, and compensating for each other as one. However, such a deep connection is difficult to achieve, given the fundamental difference between the brain and the machine. Specifically, from the side of the biological brain, information is encoded in spike trains of neurons. While from the side of computing machines, the basic unit for computation is vectors in real values. The gap between representation and computing lays a barrier to deep fusion between brain and machine, degrading the performance of iBMI systems. Lacking the deep connection between the brain and the machine, the existing iBMI systems still face critical challenges that have seriously hindered clinical application, including:
Most motor iBMIs can only control 2–3 degrees of freedom at the same time, typical applications include 2D cursors and 3D robotic arms. The accuracy of the online control process is around 60–90% with full brain control with a path efficiency of 0.4–0.8 (Collinger et al., 2013; Wodlinger et al., 2014), which still cannot meet the clinical use requirements.
Most existing BMI systems lack the ability to adapt over time and exhibit limited cross-day or long-term performance (Qi et al., 2019; Degenhart et al., 2020). Since brain signals change dynamically over time, a BMI system usually has to be recalibrated every day to maintain its performance, which seriously affects the user experience (Brandman et al., 2018).
In particular, brain signals are high-throughput data, and neural decoding approaches are commonly energy-intensive, leading to issues such as low battery life. Thus, most existing brain-implantable devices only contain a limited number of channels (usually below 50 recording channels) (Rosenthal and Reynolds, 2019; Shupe et al., 2021). Especially, for brain-implantable devices, existing wireless devices usually cannot continuously work for more than 1–2 days (Shaikh et al., 2019).
Neuromorphic computing models, which mimic the structure and mechanism of biological neural circuits, provide a promising new option for building high-performance neuroprosthesis (Figure 1).
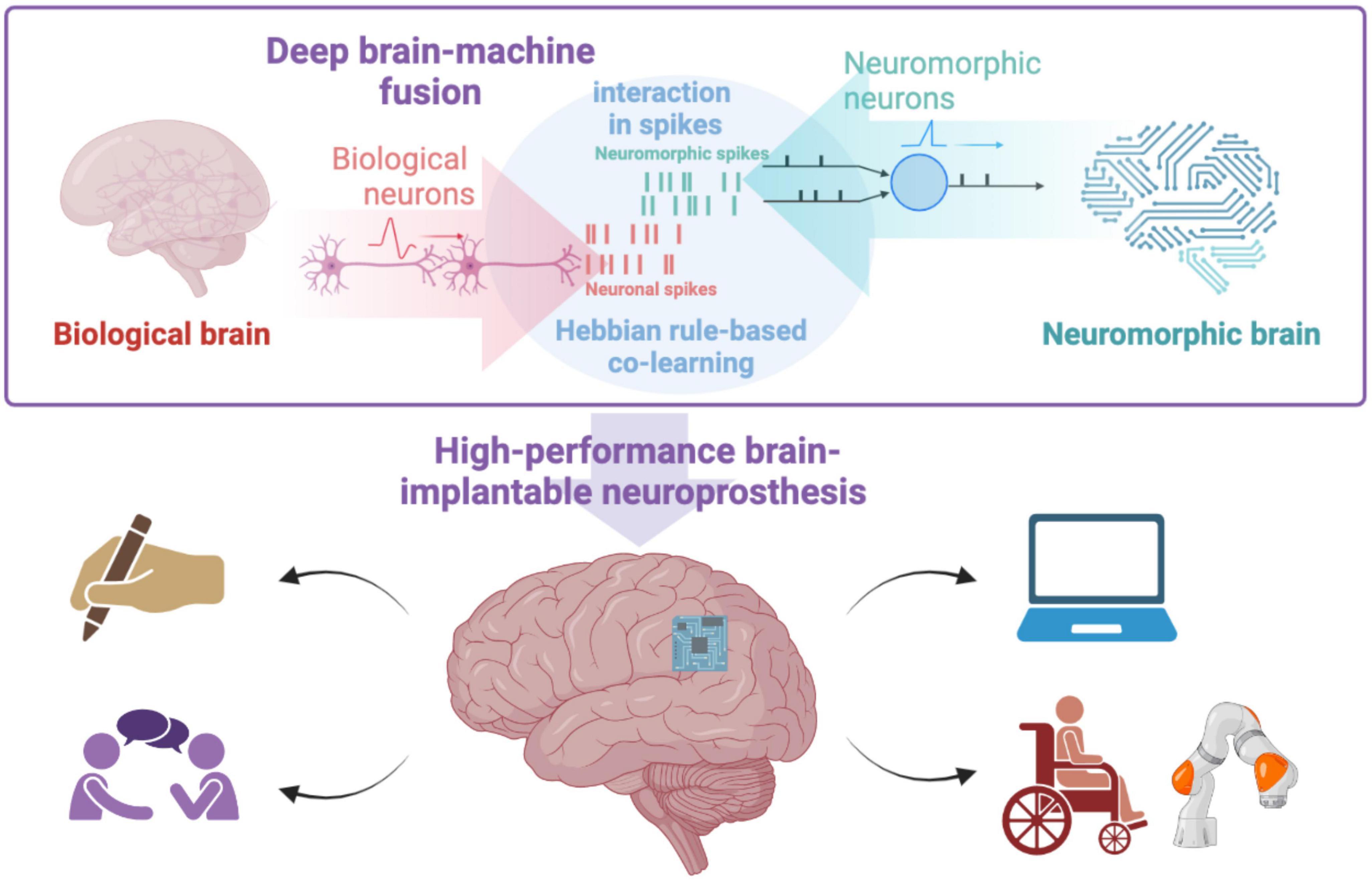
Figure 1. Neuromorphic computing facilitates deep brain-machine fusion.
Neuromorphic computing technologies, such as spiking neural networks (SNNs), simulate neuron models of the brain and compute in the form of discrete spikes (Maass, 1997). Computational neuron models, such as the Hodgkin–Huxley model, spike response model, and leaky integrate-and-fire (LIF), mimicking the behavior of biological neurons, are the basic unit for information representation and computation. And the learning process is based on discrete spikes generated by the neuromorphic neurons, following the Hebbian rules and spike timing-dependent plasticity (STDP) rule that resemble biological nervous systems. Additionally, supervised algorithms like tempotron and resume (Gütig and Sompolinsky, 2006), which are derived from artificial neural network technologies, can also be utilized in the learning process.
Another advantage of neuromorphic computing is the ability of ultra-low-cost computing. The spike-based computing is an event-driven asynchronous process, which greatly saves computing energy consumption and realizes ultra-low power consumption computing deployed on neuromorphic chips. Taking partial integro-differential equations solving task as an example, the neuromorphic computing systems simulate the brain’s neural processes, the neuromorphic computing chip TrueNorth (Merolla et al., 2014) demonstrates a much lower power consumption (10–3 to 10–1 W) than commodity server-class computing chips (such as the Intel Xeon E5-2662, which consumes around 102 W) (Smith et al., 2022), while still achieving comparable performance.
These features make the neuromorphic computing model a suitable option for developing such high-performance neuroprosthesis.
With the natural biological plausibility, neuromorphic models enable homogeneous information representation and computation between brain and machine, by direct information transfer in the form of spike trains, which can potentially enclose the connection between both sides. Traditionally, neuronal spike trains are transformed into continuous values in temporal bins to be fed into decoders (Hochberg et al., 2012; Willett et al., 2021), where the precise timing and spike order between neurons are inevitably lost. The direct spike-based interaction between brain and machine enables more precise information transfer, thus can boost the accuracy and stability of BMI systems.
With the Hebbian learning rule that is shared between biological neurons and neuromorphic neurons, BMI systems can learn and develop adaptively with the brain in an online process, which is able to bring new breakthroughs for long-term BMI systems. Besides, neuromorphic models are also expected to overcome the issue of “catastrophic forgetting,” which is prevalent in current machine learning models (Imam and Cleland, 2020). They thus are able to perform continuous learning, and facilitate long-term and stable BMIs.
With the assistance of neuromorphic chips, neuromorphic models can compute with ultra-low energy cost (Basu et al., 2018), providing an ideal solution for wireless fully brain-implantable neuroprosthesis devices (Shaikh et al., 2019).
Currently, although there are only a few studies on the intersection of neuromorphic computing and BMI, they demonstrate the potential advantages of neuromorphic-model-based neural decoding. Imam and Cleland (2020) proposed a neuromorphic olfactory circuit for online learning of odor recognition and demonstrated the superiority of neuromorphic models in online one-shot learning and continuous learning. Li et al. (2019) proposed a “bioelectronic nose” using SNN decoder to decode odor information from neural activities recorded from the olfactory bulb of rats, demonstrating that neuromorphic models have improved performance and sensitivity (quicker response) compared to traditional machine learning approaches. Kasabov (2014) proposed a special neuromorphic model called NeuCube, which has demonstrated superior performance in brain signal processing tasks. Dethier et al. (2013) implemented a Kalman filter with spike computing and constructed a real-time cursor control BMI system, and found that a neuromorphic network with 2,000 neurons can achieve a success rate of over 94%, and the performance is stably maintained for at least 1 h in a pinball task. These studies demonstrated the advantages of neuromorphic model-based BMIs to some extent, while the deep fusion between the brain and machine, and the close intersection between neuromorphic computing and BMI is to be studied. Especially, with the advantages of neuromorphic computing models, the performance of BMI can be improved in both accuracy and stability, and BMI devices can hopefully meet the requirements of being small, energy-efficient, and fully brain-implantable, which could greatly benefit the clinical use and commercialization of BMIs.
The field of BMI is currently in a period of rapid development. Neuromorphic computing, with its advantages of biological plausibility, continuous learning, and ultra-low energy consumption, perfectly aligns with the core challenges that BMI faces. The intersection of neuromorphic computing and BMI holds immense promise for the development of reliable and low-power implantable BMI devices and would significantly improve the long-term stability and usability of BMIs.
The original contributions presented in this study are included in the article/supplementary material, further inquiries can be directed to the corresponding authors.
YQ proposed the perspective and wrote the manuscript. JC contributed to the manuscript writing. YW provided funding and contributed to the paper manuscript. All authors contributed to the article and approved the submitted version.
This work was partly supported by grants from the National Key R&D Program of China (2018YFA0701400), the Key R&D Program of Zhejiang (2022C03011), the Lingang Laboratory (LG-QS-202202-04), the National Natural Science Foundation of China (62276228), the Fundamental Research Funds for the Central Universities, and the Starry Night Science Fund of Zhejiang University Shanghai Institute for Advanced Study (SNZJU-SIAS-002).
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Basu, A., Acharya, J., Karnik, T., Liu, H., Li, H., and Seo, J. -S. (2018). Low-power, adaptive neuromorphic systems: Recent progress and future directions. IEEE J. Emerg. Sel. Topics Circuits Syst. 8, 6–27. doi: 10.1109/JETCAS.2018.2816339
Berényi, A., Belluscio, M., Mao, D., and Buzsáki, G. (2012). Closed-loop control of epilepsy by transcranial electrical stimulation. Science 337, 735–737. doi: 10.1126/science.1223154
Brandman, D. M., Hosman, T., Saab, J., Burkhart, M., Shanahan, B., Ciancibello, J., et al. (2018). Rapid calibration of an intracortical brain–computer interface for people with tetraplegia. J. Neural Eng. 15:026007. doi: 10.1088/1741-2552/aa9ee7
Collinger, J. L., Wodlinger, B., Downey, J. E., Wang, W., Tyler-Kabara, E., Weber, D., et al. (2013). High-performance neuroprosthetic control by an individual with tetraplegia. Lancet 381, 557–564. doi: 10.1016/S0140-6736(12)61816-9
Degenhart, A. D., Bishop, W. E., Oby, E. R., Tyler-Kabara, E., Chase, S., Batista, A., et al. (2020). Stabilization of a brain–computer interface via the alignment of low-dimensional spaces of neural activity. Nat. Biomed. Eng. 4, 672–685. doi: 10.1038/s41551-020-0542-9
Dethier, J., Nuyujukian, P., Ryu, S. I., Shenoy, K., and Boahen, K. (2013). Design and validation of a real-time spiking-neural-network decoder for brain–machine interfaces. J. Neural Eng. 10:036008. doi: 10.1088/1741-2560/10/3/036008
Gütig, R., and Sompolinsky, H. (2006). The tempotron: a neuron that learns spike timing–based decisions. Nat. Neurosci. 9, 420–428. doi: 10.1038/nn1643
Hochberg, L. R., Bacher, D., Jarosiewicz, B., Masse, N., Simeral, J., Vogel, J., et al. (2012). Reach and grasp by people with tetraplegia using a neurally controlled robotic arm. Nature 485, 372–375. doi: 10.1038/nature11076
Imam, N., and Cleland, T. A. (2020). Rapid online learning and robust recall in a neuromorphic olfactory circuit. Nat. Mach. Intell. 2, 181–191.
Kasabov, N. K. (2014). NeuCube: A spiking neural network architecture for mapping, learning and understanding of spatio-temporal brain data. Neural Netw. 52, 62–76. doi: 10.1016/j.neunet.2014.01.006
Li, M., Ruan, H., Qi, Y., Guo, T., Wang, P., and Pan, G. (2019). Odor recognition with a spiking neural network for bioelectronic nose. Sensors 19:993. doi: 10.3390/s19050993
Maass, W. (1997). Networks of spiking neurons: the third generation of neural network models. Neural Netw. 10, 1659–1671. doi: 10.1016/S0893-6080(97)00011-7
Merolla, P. A., Arthur, J. V., Alvarez-Icaza, R., Cassidy, A., Sawada, J., Akopyan, F., et al. (2014). Artificial brains. A million spiking-neuron integrated circuit with a scalable communication network and interface. Science 345, 668–673.
Moses, D. A., Metzger, S. L., Liu, J. R., Anumanchipalli, G., Makin, J., Sun, P., et al. (2021). Neuroprosthesis for decoding speech in a paralyzed person with anarthria. N. Engl. J. Med. 385, 217–227.
Qi, Y., Liu, B., Wang, Y., and Pan, G. (2019). Dynamic ensemble modeling approach to nonstationary neural decoding in brain-computer interfaces. Adv. Neural Inf. Process Syst. 32, 6089–6098.
Rosenthal, J., and Reynolds, M. S. (2019). A 1.0-Mb/s 198-pJ/bit Bluetooth Low-Energy compatible single sideband backscatter uplink for the NeuroDisc brain–computer interface. IEEE Trans. Microw. Theory Techn. 67, 4015–4022.
Scangos, K. W., Khambhati, A. N., Daly, P. M., Makhoul, G., Sugrue, L., Zamanian, H., et al. (2021). Closed-loop neuromodulation in an individual with treatment-resistant depression. Nat. Med. 27, 1696–1700.
Shaikh, S., So, R., Sibindi, T., Libedinsky, C., and Basu, A. (2019). Towards intelligent intracortical BMI (i 2BMI): Low-power neuromorphic decoders that outperform Kalman filters. IEEE Trans. Biomed. Circuits Syst. 13, 1615–1624.
Shupe, L. E., Miles, F. P., Jones, G., Yun, R., Mishler, J., Rembado, I., et al. (2021). Neurochip3: An autonomous multichannel bidirectional brain-computer interface for closed-loop activity-dependent stimulation. Front. Neurosci. 15:718465. doi: 10.3389/fnins.2021.718465
Smith, J. D., Hill, A. J., Reeder, L. E., Franke, B., Lehoucq, R., Parekh, O., et al. (2022). Neuromorphic scaling advantages for energy-efficient random walk computations. Nat. Electron. 5, 102–112.
Willett, F. R., Avansino, D. T., Hochberg, L. R., Henderson, J., and Shenoy, K. (2021). High-performance brain-to-text communication via handwriting. Nature 593, 249–254.
Wodlinger, B., Downey, J. E., Tyler-Kabara, E. C., Schwartz, A., Boninger, M., and Collinger, J. (2014). Ten-dimensional anthropomorphic arm control in a human brain- machine interface: difficulties, solutions, and limitations. J. Neural eng. 12:016011.
Keywords: brain-machine interface, brain-computer interface, neuromorphic model, brain-like computing, neuroprosthesis, brain-machine fusion
Citation: Qi Y, Chen J and Wang Y (2023) Neuromorphic computing facilitates deep brain-machine fusion for high-performance neuroprosthesis. Front. Neurosci. 17:1153985. doi: 10.3389/fnins.2023.1153985
Received: 30 January 2023; Accepted: 10 April 2023;
Published: 12 May 2023.
Edited by:
Zhiqiang Tian, Xi’an Jiaotong University, ChinaReviewed by:
Shoeb Shaikh, Siemens, SingaporeCopyright © 2023 Qi, Chen and Wang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yu Qi, cWl5dUB6anUuZWR1LmNu; Yueming Wang, eW1pbmd3YW5nQHpqdS5lZHUuY24=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.