G-Exos: A wearable gait exoskeleton for walk assistance
 Mouhamed Zorkot
Mouhamed Zorkot Léa Ho Dac
Léa Ho Dac Edgard Morya
Edgard Morya Fabrício Lima Brasil
Fabrício Lima Brasil- 1Neuroengineering Program, Edmond and Lily Safra International Institute of Neuroscience, Santos Dumont Institute, Macaiba, Brazil
- 2Swiss Federal Institute of Technology, School of Life Sciences, Lausanne, Switzerland
A corrigendum on
G-Exos: A wearable gait exoskeleton for walk assistance
by Zorkot, M., Dac, L. H., Morya, E., and Brasil, F. L. (2022). Front. Neurorobot. 16:939241. doi: 10.3389/fnbot.2022.939241
In the published article, there was an error in Figure 1 as published. For safety, the Figure 1 should be modified. The corrected Figure 1 and its caption appear below. The picture is of the authors' own authorship. Thus, the reference Palastanga et al. should be removed.
FIGURE 1
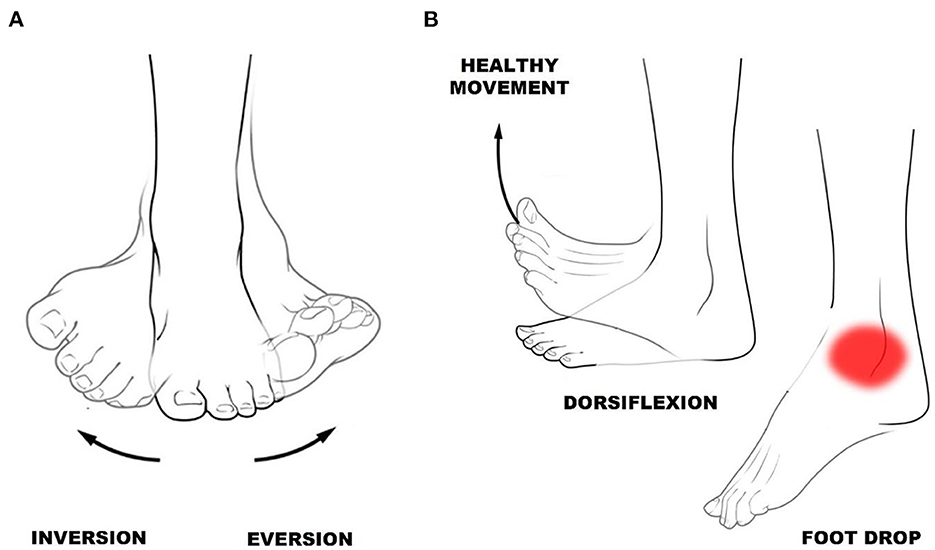
Figure 1. (A) Ankle inversion and eversion. (B) Ankle dorsiflexion—toes toward shins, and foot drop—difficulty lifting the forefoot.
In the published article, the reference for Palastanga and Soames (2011) [Palastanga, N., and Soames, R. (2011). Anatomy and Human Movement, Structure and Function with PAGEBURST Access, 6: Anatomy and Human Movement. Amsterdam: Elsevier Health Sciences] will not be used anymore as the figure in the original article was adapted from this paper. It should be removed.
The authors apologize for this error and state that this does not change the scientific conclusions of the article in any way. The original article has been updated.
Publisher's note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Keywords: exoskeleton, foot drop, gait, assistive technology, human–machine interaction
Citation: Zorkot M, Dac LH, Morya E and Brasil FL (2022) Corrigendum: G-Exos: A wearable gait exoskeleton for walk assistance. Front. Neurorobot. 16:1098880. doi: 10.3389/fnbot.2022.1098880
Received: 15 November 2022; Accepted: 22 November 2022;
Published: 01 December 2022.
Edited and reviewed by: Surjo R. Soekadar, Charité Universitätsmedizin Berlin, Germany
Copyright © 2022 Zorkot, Dac, Morya and Brasil. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Mouhamed Zorkot, bW91aGFtZWQuem9ya290QGVkdS5pc2Qub3JnLmJy