 Kosta Jovanović
Kosta Jovanović Tadej Petrič
Tadej Petrič Toshiaki Tsuji
Toshiaki Tsuji Calogero Maria Oddo
Calogero Maria Oddo
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
EDITORIAL article
Front. Neurorobot., 16 October 2019
Volume 13 - 2019 | https://doi.org/10.3389/fnbot.2019.00085
This article is part of the Research TopicHuman-Like Advances in Robotics: Motion, Actuation, Sensing, Cognition and ControlView all 10 articles
Editorial on the Research Topic
Human-Like Advances in Robotics: Motion, Actuation, Sensing, Cognition and Control
Robots have significantly contributed to the quality of human lives by alleviating exhausting, repetitive and monotonous industry jobs in untidy and risky environments. They have increased the efficiency of logistics in warehouses and factories. Inspection of infrastructures has been advanced by robotics. Just now, robots contribute to state-of-the-art surgery, rehabilitation, and medical diagnostics. However, one of the robotics markets with greatest growth expectations—home and service robotics (Litzenberger, 2018), apart for specialized devices such as cleaning robots or cooking assistants, is still struggling to find and adopt a robot which could respond to most challenges and demands in our homes. Our homes are unstructured, with space- and time- variant environments adapting to human needs and commodity. In order to fit such designed human-centered environment, service robots of tomorrow might be human-like machines. Such service robots could not only look like humans, but move and behave like humans which means that they also have to sense and act in a human manner. To that end, understanding biomechanics and sensorimotor control of humans has been a subject of scientific research for centuries. Making an artificial human is a dream of humanity even longer. In modern history this is demonstrated, as an example, by the Mechanical Turk, a human-like machine developed in 1770 by Wolfgang von Kempelen at the House of Habsburg which apparently was automatedly playing chess but was actually operated, through elegant mechanisms, by a chess master hidden inside. The Mechanical Turk has been a source of inspiration for scientists, popular culture, and the business sector, as confirmed by the Amazon Mechanical Turk web-based crowd work platform. This dream to reproduce human capabilities, combined with market needs, in the last few decades, resulted in the rapid progress of humanoid robotics as a scientific discipline. Consequently, bionics of human sensing capabilities, human motion performances, and human behavior patterns, is perceived as an essential part of robotics research.
Working in the field of humanoid robotics we all face typical questions:
• Could we design engineering counterparts for corresponding body parts which have been mastered through human evolution?
• Do we really need to strive for faithful engineering replicas of a human body, the way it moves and behaves, or we could just undertake engineering design of robot parts which resemble key functionalities of humans?
This Research Topic brings theoretical and experimental findings and outlines guidelines to research activities in the field of human-like robotics. It aims at giving insights in the latest related scientific investigations and at presenting some samples of the current level of developed technologies importing those concepts in robotics with a science for robotics and robotics for science methodology (Yang et al., 2016). The main research lines addressed are:
• Biomechanics and actuation mechanisms: robot actuation units which are fully designed to copy the structure of human muscle-tendon unit (Wittmeier et al., 2013) or actuators which resemble human actuation functionality by adjusting its mechanical impedance to specific tasks (Wolf et al., 2016); the papers of the Research Topic mainly pertaining to this cluster present an arm-exoskeleton (Petrič et al.), an actuator with variable stiffness for biped robots (Rodriguez-Cianca et al.) and a robot leg with series elastic actuator (Lee and Oh).
• Sensing and perception systems: biomimetic transducers and associated neurocomputational architectures inspired by physiological models for humanoid robotics (Dahiya et al., 2010) or for replacing lost sensory functions in bionic prostheses (Oddo et al., 2016); the papers of the Research Topic mainly pertaining to this cluster present a system for classification of upper limb posture and force for prosthetics (Leone et al.), tactile sensorization of a robust gripper for precise manipulation tasks (Massari et al.), and a study on manipulation of delicate objects under different sensory feedback strategies and variable grasp stiffness (Haas et al.).
• Cognition and behavior patterns of humans: as the most complex system to be engineered which cannot distinguish and separate the morphological shape, experience and intelligence (Pfeifer and Bongard, 2006), but to do comprehensively research and investigation on how to define and develop the “brain” for future robots through the interaction of perception, control, learning, and cognition as summarized in the work of Li et al. (2019); the papers of the Research Topic mainly pertaining to this cluster present a neurocomputactional architecture for spike-based tactile encoding-decoding of surface features (Rongala et al.), a path planning and walking strategy for humanoids (Raković et al.), and a central patter generator with Hebbian plasticity for human-robot interaction (Jouaiti et al.).
According to these categories, a possible clustering of the papers published within the present Research Topic is proposed in Figure 1.
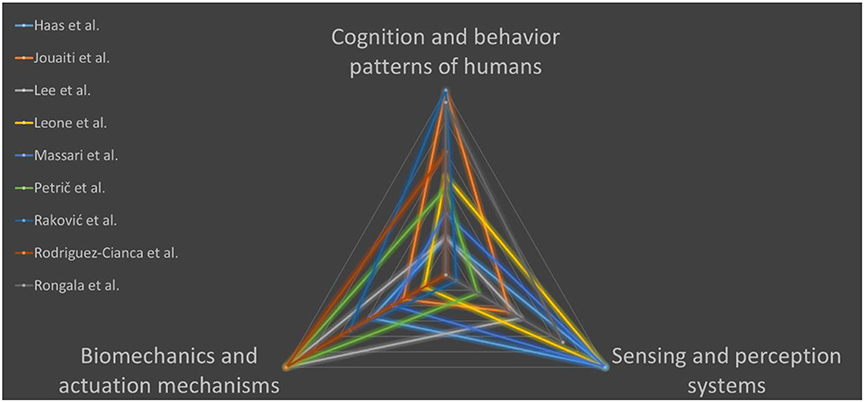
Figure 1. Clustering of the papers published within the Research Topic on human-like robotics.
The elaborated topics will lead us to a current answer on how far away state of the art humanoids are from humans in terms of mechanics, intelligence, and communication (Fukuda et al., 2001). Papers presented in the Research Topic depict useful pieces of research toward an ultimate goal of all roboticists: to build a fully functional autonomous robot which matches shape and performance of a human in a human-centered stochastic and unstructured environment. Since the Research Topic spans through numerous scientific disciplines, multidisciplinary research activities and variety of engineering and scientific issues, it is not possible to gather all results which will give a comprehensive insight into it. However, we should remember the words of Isaac Asimov in his novel Robots of Down: “A knotty puzzle may hold a scientist up for a century, when it may be that a colleague has the solution already and is not even aware of the puzzle that it might solve.”
All authors listed have made a substantial, direct and intellectual contribution to the work, and approved it for publication.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
We thank all authors and reviewers contributing with their work to this Research Topic. Guest editor CO thanks Dr. Alberto Mazzoni for meaningful conversations.
Dahiya, R. S., Metta, G., Valle, M., and Sandini, G. (2010). Tactile sensing—from humans to humanoids. IEEE Trans. Robot. 26, 1–20. doi: 10.1109/TRO.2009.2033627
Fukuda, T., Michelini, R., Potkonjak, V., Tzafestas, S., Valavanis, K., and Vukobratovic, M. (2001). How far away is "artificial man. IEEE Robot. Autom. Magaz. 8, 66–73. doi: 10.1109/100.924367
Li, J., Li, Z., Chen, F., Bicchi, A., Sun, Y., and Fukuda, T. (2019). Combined sensing, cognition, learning, and control for developing future neuro-robotics systems: a survey. IEEE Trans. Cogn. Dev. Syst. 11, 148–161. doi: 10.1109/TCDS.2019.2897618
Litzenberger, G. (2018). Welcome to the IFR Press Conference. Tokyo. Available online at: https://ifr.org/downloads/press2018/WR_Presentation_Industry_and_Service_Robots_rev_5_12_18.pdf
Oddo, C. M., Raspopovic, S., Artoni, F., Mazzoni, A., Spigler, G., Petrini, F., et al. (2016). Intraneural stimulation elicits discrimination of textural features by artificial fingertip in intact and amputee humans. Elife 5:e09148. doi: 10.7554/eLife.09148
Pfeifer, R., and Bongard, J. (2006). How the Body Shapes the Way We Think: A New View of Intelligence. Cambridge: MIT Press.
Wittmeier, S., Alessandro, C., Bascarevic, N., Dalamagkidis, K., Devereux, D., Diamond, A., et al. (2013). Toward anthropomimetic robotics: development, simulation, and control of a musculoskeletal torso. Artif. Life 19, 171–193. doi: 10.1162/ARTL_a_00088
Wolf, S., Grioli, G., Eiberger, O., Friedl, W., Grebenstein, M., Hoppner, H., et al. (2016). Variable stiffness actuators: review on design and components. IEEE ASME Trans. Mechatron. 21, 2418–2430. doi: 10.1109/TMECH.2015.2501019
Keywords: motor control, human-like perception and cognition, human-like sensing and actuation, musculoskeletal robots, digitalization of human
Citation: Jovanović K, Petrič T, Tsuji T and Oddo CM (2019) Editorial: Human-Like Advances in Robotics: Motion, Actuation, Sensing, Cognition and Control. Front. Neurorobot. 13:85. doi: 10.3389/fnbot.2019.00085
Received: 30 August 2019; Accepted: 30 September 2019;
Published: 16 October 2019.
Edited and reviewed by: Florian Röhrbein, Technical University of Munich, Germany
Copyright © 2019 Jovanović, Petrič, Tsuji and Oddo. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Tadej Petrič, dGFkZWoucGV0cmljQGlqcy5zaQ==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.