 Hao Zhang
Hao Zhang Desheng Wei1
Desheng Wei1 Jiansheng Fan
Jiansheng Fan
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Mater. , 14 December 2023
Sec. Smart Materials
Volume 10 - 2023 | https://doi.org/10.3389/fmats.2023.1331081
This article is part of the Research Topic Advanced Materials and Techniques for Structural Monitoring, Analysis and Control View all 16 articles
Finite element model updating provides an important supplement for finite element modelling. However, some studies have shown that if the tested structure involves local nonlinearities due to damages, material properties and large deformation et al., it is difficult to achieve an accurate modified model using conventional model updating methods that are based on the assumption of linear structures. To address this issue, a two-stage model updating method separating the effects of local nonlinearities is proposed in this paper. Firstly, the underlying linear frequency response function is obtained by using the conditioned reverse path method. Then, combined with the Sherman-Morrison-Woodbury formula and the model updating objective function established by the frequency response function similarity metric, then structural model updating and damage detection are carried out as the second stage. Three numerical examples are given to illustrate the effectiveness of the proposed method. This method can not only accurately identify the location and quantify the extent of structural damages, but also has the advantages of not based on sensitivity, not depending on the selection of frequency points, not repeatedly calling the initial model et al. The proposed method has high computational efficiency and avoids the numerical problems often encountered by conventional frequency response function-based model updating methods.
Model updating theories use structural characteristics through static or dynamic testing to establish optimization objective functions, and then the finite element models continuously approach the actual structures driven by the constrained optimization process, which is an important supplement to the finite element analysis and has become one of the main means of structural damage identification under the theoretical framework of structural health monitoring (Friswell and Mottershead, 1995; Hou and Xia, 2022). However, conventional model updating methods based on linear assumptions are no longer effective for the structures with local nonlinearities originated from material properties, boundary conditions and large deformation et al. The full-scale shaking table testing of a 7-story shear wall structure conducted by Moaveni et al. (2010) shows that as the extent of damages increase, the tested structure displays features of nonlinear dynamics, and the linear numerical model cannot accurately represent the actual structure.
Nonlinear model updating has been rapidly developing in recent years, and its technical roadmap can be seen as an extension of conventional linear model updating theories. But due to the multi-dimensional nature, nonlinear characteristics such as nonlinear normal modes (NNMs) and generalized frequency response functions (GFRFs) are arduous to directly applied for nonlinear model updating (Kerschen et al., 2006; Noel and Kerschen, 2017). Therefore, researchers tend to use degradation forms of the higher-order nonlinear characteristics mentioned above such as frequency-energy plot (FEP) and nonlinear output frequency response function (NOFRF) to address the issue (Zhu et al., 2022). But they are not yet as mature as the modal theories of linear structures due to the sophisticated experimental process (Zhang et al., 2020), and the effectiveness of applying them for nonlinear model updating and structural damages identification is also limited, especially in identifying damages of linear and nonlinear parts separately in tested structures with local nonlinearities (Li et al., 2021).
Nonlinearities are generally located in local regions of actual structures, and the positions are mostly known (Ewins et al., 2015). Therefore, it is reasonably expected to separate the nonlinear effects and obtain the linear parts of structures with local nonlinearities, namely, the underlying linear system (ULS), and then linear model updating methods can be used and achieve structural damages identification. Some researchers think that most nonlinear behavior is dependent on vibration amplitude, so the linear model updating methods are available for modifying linear parts of structures with local nonlinearities under the condition of low vibration amplitude (Wang et al., 2018). Nonetheless, some researchers consider that it is difficult to control the degree of nonlinear behavior, and approximating linearity under the condition of low vibration amplitude may not be reliable (Richards and Singh, 1998). A nonlinear system identification method, conditioned reverse path (cRP) method developed by Richards and Singh (1998), is able to separate local nonlinear effects in frequency domain and obtains the underlying linear frequency response functions (FRFs) of the tested structure’s ULS, and several studies have verified its effectiveness in extracting the linear FRFs and identifying nonlinear parameters (Wu et al., 2015; Huang and Ferguson, 2018).
If the underlying linear FRFs of structures with local nonlinearities can be obtained, then FRFs-based linear model updating methods can be applied for modifying initial numerical models and handling structural damages identification. FRF data can avoid errors introduced by modal analysis (Friswell and Mottershead, 1995) and ensure relatively high-quality data due to the property of anisotropy. Therefore, FRFs-based model updating methods have received widespread attention. Lin and Ewins (1994) proposed a model updating method based on FRFs’ sensitivity earlier and Lin and Zhu (2006) subsequently extended it to the modification of damping matrices. Lin (2017) further proposed the FRFs-based model updating method using the sensitivity with weighted function, which avoids the requirement for the accuracy of initial modeling and expands the applicability of the FRFs’ sensitivity-based method. Cong et al. (2022) proposed a FRFs-based model updating method using the zero-pole decomposition of FRFs, which achieved simultaneous modification of mass, stiffness, and damping matrices. In addition, researchers have conducted in-depth research on some detailed issues in FRFs-based model updating. For examples, Hassani and Shadan (2022) proposed a FRFs-based model updating method for the issues of dense modes and incomplete modal data. Arora et al. (2023) established a FRFs-based model updating method for the issue of non-proportional damping. Nevertheless, FRFs-based model updating methods, like other conventional model updating methods based on sensitivity, may encounter issues such as low computational efficiency of iterative mechanisms, artificial frequency points selection and ill-conditioned matrices et al. Which to some extent need further development.
This paper presents a novel two-stage FRFs-based model updating method for structures with local nonlinearities. Firstly, underlying linear FRFs of ULS obtained through the first phase of the cRP method. Then during the model updating process, the proposed method combines Sherman-Morrison-Woodbury (SMW) formula and the optimization objective function established by the FRF similarity metric. It only requires partial FRFs, and has the advantages of not asking frequency point selection, not reusing the initial model, and not depending on sensitivity. The effectiveness of this method is verified by three numerical examples.
The cRP method is a two-stage nonlinear system identification method, and only the first stage is implemented here to extract the underlying linear FRF of the ULS of structures with local nonlinearities serving as the first stage of the proposed method. The cRP method’s main conclusions related to this paper will be discussed as follows. For more detailed contents, please refer to the reference provided (Richards and Singh, 1998). Firstly, the nonlinear structural motion equation is expressed as,
where M, C, and K are the structural mass, damping, and stiffness matrices of the linear parts respectively.
where
According to the theory of conditioned power spectral density (cPSD), cPSD which is the conventional power spectral density (PSD) in linear structural dynamics separating nonlinear effects can be recursively calculated by the equations as follows (Bendat and Piersol, 2010),
where G represents PSD or cPSD, when the matrix G has a bracket label, it signifies the cPSD, or conditioned PSD. Otherwise, it is the classic PSD in linear structural dynamics without any conditions. L is a transitional matrix. i and j are the labels related to response or excitation of underlying linear parts, and r is the label related to nonlinear response. Labels with brackets indicate the conditions. For instance, (−1: r) represents the condition that the PSD is independent of the first to rth type of nonlinearities. Specifically, when r = 1, (−1: 1) equals (−1), then the cPSD is the PSD separating the first type of nonlinearity, and (−1: 0) is the unconditional PSD calculated by linear theory, Gij(-1:0) = Gij. After calculating the required cPSD, the cPSD-based underlying linear FRF estimation can be derived from the PSD-based linear FRF estimation theory (Bendat and Piersol, 2010),
where X and F are related to responses and excitations respectively similar to the counterparts in PSD-based FRF estimation theories in linear structural dynamics. The process of using the equations (4) and (5) to calculate the underlying linear FRFs will be further illustrated in case 1.
If underlying linear FRFs are obtained by the cRP method presented above, the FRF-based model updating methods are available to modify the linear parts of structures with local nonlinearities and conduct structural damage identification. Correlation analysis is an effective tool for evaluating the accuracy of numerical models and is also a common objective function in model updating. The correlation analysis methods for FRF data mainly including the frequency domain assurance criterion (FDAC) and the frequency response assurance criterion (FRAC) (Lee et al., 2018),
where H1, H2 represents two different FRFs to be compared, Np, Nf are the number of frequency points in the FRFs. FDAC, also known as frequency domain MAC, is widely used in frequency domain correlation analysis. However, FDAC is a frequency-dependent metric, which may lead to the issue of frequency points selection (Gang et al., 2014). FRAC describes the overall similarity between two FRFs by providing a single value in [0,1], which is more suitable for model updating as an objective function (Zhan et al., 2019). However, FRAC is not sensitive to differences in the amplitudes of the FRFs. Therefore, Lee et al. (2018) proposed a new FRF correlation analysis metric named frequency response function similarity metric (FRFSM), which is also a single-valued metric in the interval of [0,1] applied for evaluating the overall similarity between FRFs but more sensitive to amplitude differences than FRAC. FRFSM is defined as follows,
where the function f represents the probability density function of the standard normal distribution,
where H1 and H2 can be understand as the FRFs calculated by the finite element model and the FRF data obtained from experiments respectively in model updating. From equations (8) to (11), it can be seen that FRFSM is equivalent to assigning weights to the differences between FRFs at the standard normal distribution probability density function scale.
Based on the single-value similarity metric FRFSM, this paper defines the following model updating objective function,
where i, j refers to the labels of the corresponding FRF curves used for model updating. For example, S21 describes the FRFs’ similarity of 1 excitation and 2 responses between the FRF from the numerical model and the FRF from testing in the model updating framework. Complete FRF data measurement and frequency point selection are unnecessary.
Like other conventional model updating methods, FRF-based model updating may encounter the issue of computational efficiency due to reusing the initial numerical model in the iterative optimization mechanism. Structural reanalysis theories aim to achieve fast calculation by utilizing initial structural information once and calculating subsequent responses after structural modification (Li et al., 2023). Therefore, this paper combines structural reanalysis theories with model updating to avoid recalling the initial model, thereby improving the computational efficiency of model updating process.
The SMW formula is widely used in structural reanalysis. Akgun et al. (2001) have investigated that several common structural reanalysis methods are actually equivalent to the SMW formula under certain conditions. The SMW formula mainly solves the issue of taking inverse matrices of locally modified matrices. Fortunately, the dynamic stiffness matrix of Equation 3 and FRF matrices are exactly a pair of inverse matrices, H(ω) = B(ω)−1, and dynamic stiffness matrix includes structural characteristic matrices. Therefore, the SMW formula can be reasonably combined with FRF-based model updating. If the dynamic stiffness B is modified by ΔB with rank p, andΔB = UVT, the mathematical expression of the SMW formula is (Akgun et al., 2001)
If the rank of ΔB is 1 and ΔB = uvT, the SMW formula degenerates into the Sherman-Morrison (SM) formula, which is mathematically expressed as (Akgun et al., 2001)
It can be seen that if this formula is applied to FRF-based model updating, it can avoid repeatedly calling the overall finite element model and only the initial model is used to calculate the FRFs after each modification.
Additionally, it should be noted that when applying the SMW formula to FRF-based model updating, a key step is how to decompose the dynamic stiffness modification matrix ΔB in a reasonable manner to satisfy Eq. 13 or (14). This paper selects sub-matrix parameterization for the parameters to be updated (Friswell and Mottershead, 1995). Taking the stiffness matrix as an example, the modified stiffness matrix Ku can be represented as,
where pi is the sub-matrix parameter, and each sub-matrix
where matrix Q is a real orthogonal matrix, and each column is composed of the eigenvectors of matrix ΔB. Matrix
This paper establishes a two-stage model updating method for the linear parts of structures with local nonlinearities. Firstly, cRP method is employed to separate nonlinear effects to obtain the underlying linear FRFs. Secondly, the FRFSM metric is utilized to establish the model updating objective function. Meanwhile, based on the relationship of inverse matrices between FRF and dynamic stiffness matrix, the symmetric Schur decomposition of the structural sub-matrix is taken as the modification matrix in the SMW formula, and the SMW formula is reasonably integrated into the model updating process. The flowchart of the proposed method as seen in Figure 1. To further illustrate the details of the method and validate its efficacy in model updating and structural damage identification, three numerical examples are provided below.
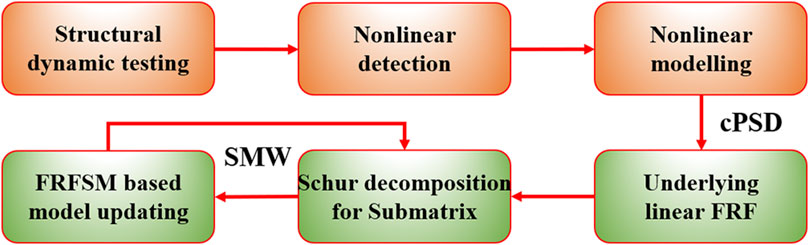
FIGURE 1. Process of the underlying linear model updating for structures with local nonlinearities.
This example is primarily employed to demonstrate the intricate details of the proposed method, with the model data being sourced from reference (Richards and Singh, 1998). The three DOFs spring-mass structure shown in Figure 2 is a structure with local nonlinearities of single location and multiple types. Quadratic and cubic types of nonlinearities are positioned between the second and third DOFs. The underlying linear structural mass M, damping C, and stiffness K matrices are
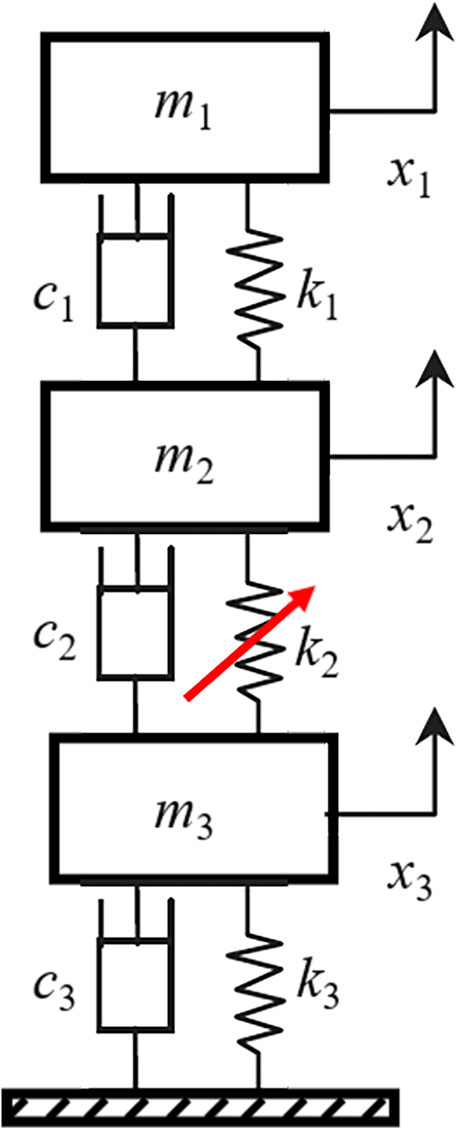
FIGURE 2. Three DOFs mass-spring structure.
The restoring force between the second and the third DOF is expressed as,
The first step is to extract the underlying linear FRFs using the cRP method. Convert Equation 4 into a block diagram as shown in Figure 3, and take the H2 estimation of Equation 5 as an example. Based on this block diagram, cPSD can be hierarchically solved. Due to the existence of two types of nonlinearities, it is necessary to firstly calculate the cPSD that is independent of the first type of nonlinearity, i.e., cPSD with the condition of (−1), and then further calculate the cPSD independent of the second type of nonlinearity, i.e., cPSD with the condition of (−1:2). The subscripts 1 and 2 in Figure 3 represent nonlinearity, and the labels between the two types of nonlinearities can be arbitrarily assigned. All PSD are solved according to relevant linear theories. It is worth noting that the calculation of the L matrix of the first layer in the block diagram only requires conventional PSD data, while the L matrix of the second layer in the block diagram requires the corresponding cPSD. The calculation of L matrix process is similar to the block diagram shown in Figure 3 and will not be repeated.
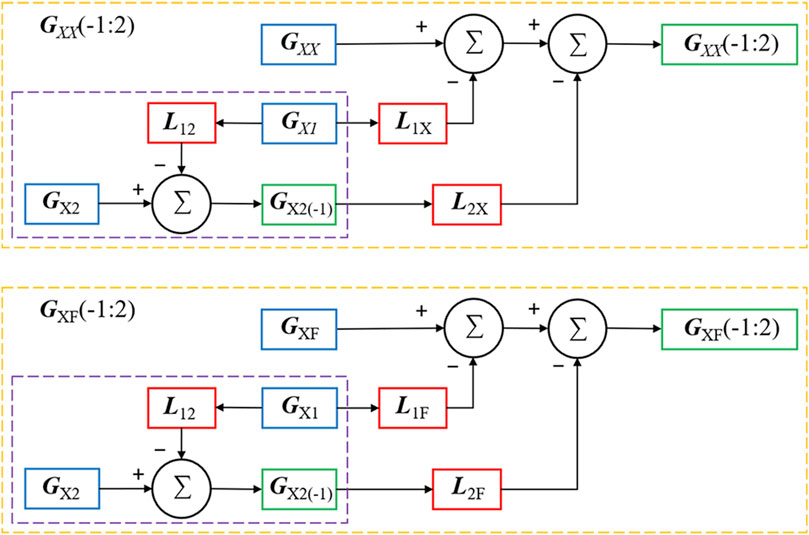
FIGURE 3. Calculation flow chart of cPSD.
A zero-mean Gaussian white noise excitation with a mean square value of 5 kN is applied at the first DOF. Taking the FRF calculated from the response of the second DOF as an example, the FRF calculated using PSD data directly, namely, H21 and the FRF calculated using cPSD data using the cRP method, namely, Hc21 are compared with the underlying linear FRF calculated theoretically, as shown in Figure 4. It can be seen that the presence of nonlinearities causes significant distortion in the estimated FRF. In contrast, the conditioned FRF after cRP operation is very close to the theoretical FRF, indicating that the cRP method can effectively extract the underlying linear FRF of structures with local nonlinearities.
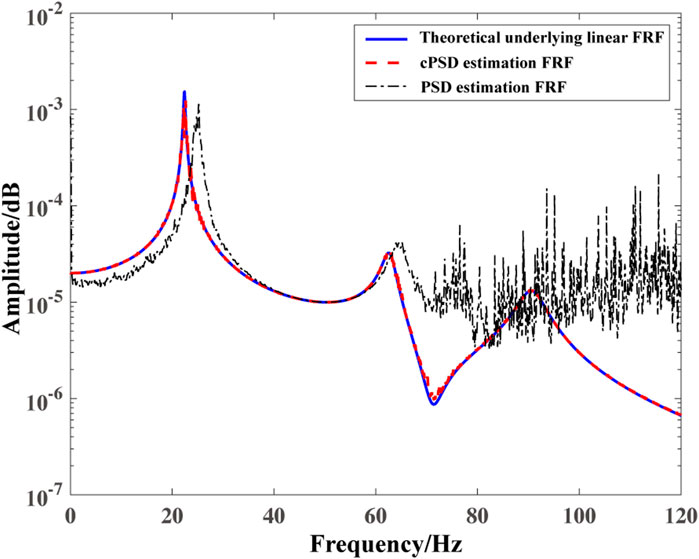
FIGURE 4. Comparison between FRFs by cPSD and PSD and theoretical FRF.
Subsequently, the model updating method proposed in this paper is applied for structural damage identification. Assuming that there is 30% damage to k1. Then the damaged FRF is taken as the experimental data, and the undamaged FRF is taken as the numerical data. Taking the FRF data excited at the first and the second DOF as an example, before the process of model updating, the comparison between the experimental FRF estimated by cPSD and the theoretically calculated FRF is shown in Figure 5. The difference between the FRF curves indicates the need for model updating. Taking the standard deviation
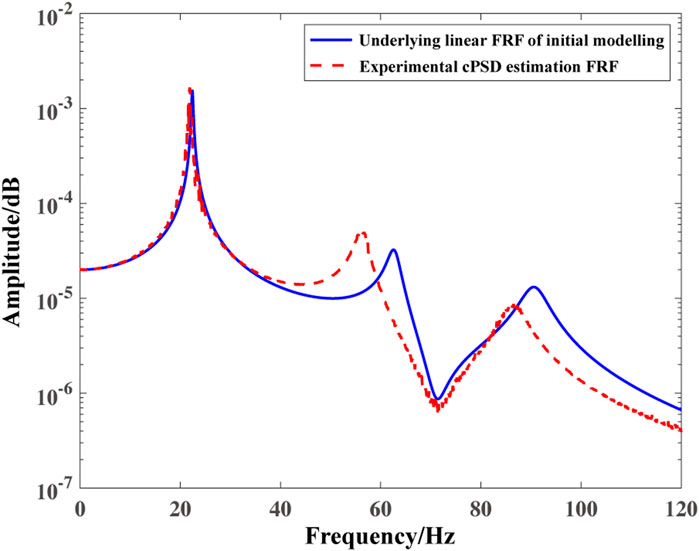
FIGURE 5. Comparison of underlying linear FRFs before model updating.
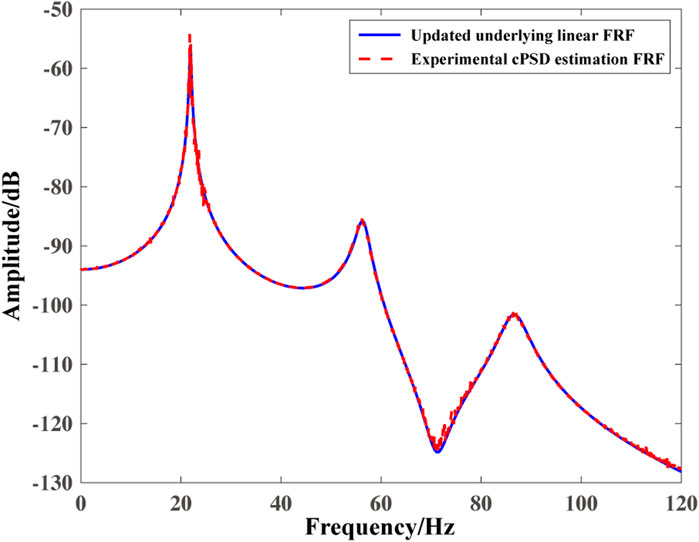
FIGURE 6. Comparison of underlying linear FRFs after model updating.
The six DOFs spring-mass structure depicted in Figure 7 constitutes a multi-type multi-location nonlinear system, where the cubic and quadratic nonlinearities located at the first and the fourth DOFs respectively, both of which are grounded nonlinear springs. The model data comes from the reference (Zhang et al., 2017), and the stiffness coefficients of the two nonlinear springs are knl1 = 1010 N/m3, knl2 = 107 N/m2, respectively. The elements of the underlying linear structural mass M, damping C, and stiffness K matrices are,
Assuming that k3 and k5 sustain 20% and 30% damage, respectively. Apply a zero-mean Gaussian white noise excitation with a mean square value of 5 kN at the sixth DOF. Similarly, the cRP method is first used to estimate the experimental FRF from cPSD. Taking the FRF calculated from the response of the third DOF as an example, the comparison between the initial modeling FRF and the experimental FRF is shown in Figure 8, where the FRFSM value is 0.6368. Take the second to fifth sub-matrix parameters as the parameters to be updated. The experimental FRF data used is the sixth column of the overall FRF matrix representing the excitation at the sixth DOF within the frequency range of [0, 500] Hz; Similarly, the fmincon function in the Matlab (2021a) optimization toolbox is used to optimize Equation 12, and the standard deviation
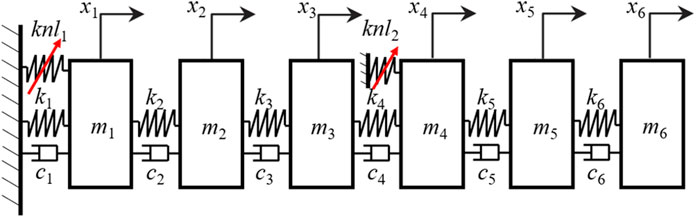
FIGURE 7. Six DOFs mass-spring nonlinear structure.
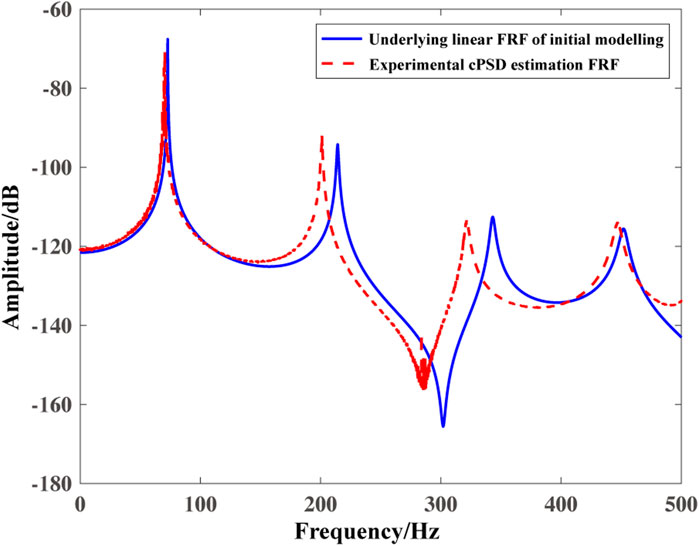
FIGURE 8. Comparison of underlying linear FRFs before model updating.
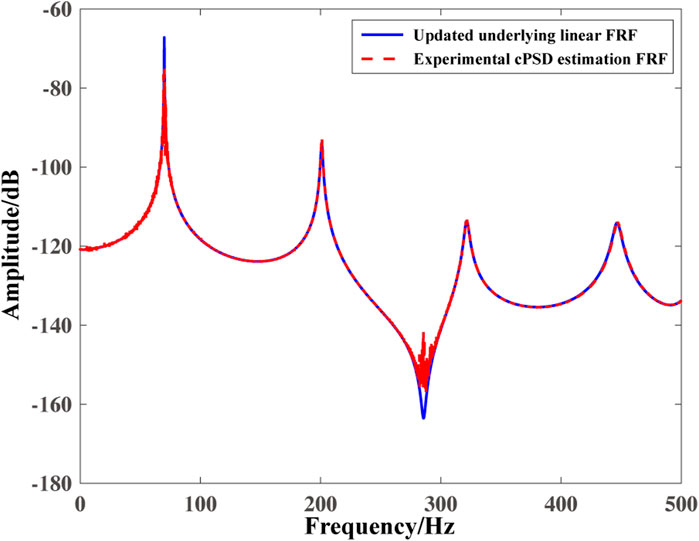
FIGURE 9. Comparison of underlying linear FRFs after model updating.
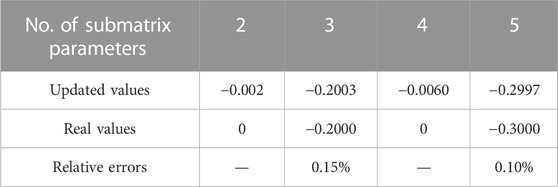
TABLE 1. Model updating results of submatrix parameters.
Figure 10 is a widely used numerical model for nonlinear system identification (Kerschen et al., 2003), which represents a nonlinear cantilever beam structure consisting of 6 Euler beam elements and 12 DOFs. At the beam end, there is a cubic stiffness grounded spring with a stiffness coefficient of 108 N/m3. An excitation of zero-mean Gaussian white noise with a mean square value of 50 N is imposed at the 11th DOF of the beam end. The basic parameters of the model are presented in Table 2, and the data is adopted from the reference (da Silva et al., 2010).
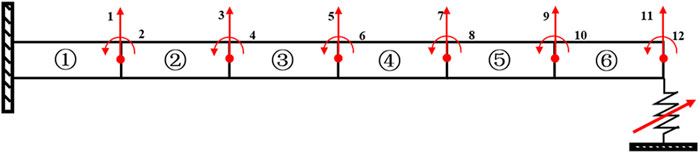
FIGURE 10. Nonlinear cantilever beam structure.

TABLE 2. Numerical model parameters for the nonlinear cantilever beam model.
Assuming a 30% stiffness damage occurs at the fourth element, and the sub-matrix parameters of the third to fifth elements are used as the parameters to be updated. Taking the FRF from the response of the third DOF as an example, before model updating, the comparison between the FRF estimated by the cPSD of the damaged model and the FRF from the initial modeling without damage is shown in Figure 11. The frequency band is taken as [0.500] Hz, and the FRFSM value at this time is 0.8970; The comparison of the two FRFs after model updating is shown in Figure 12. Under the same frequency range for analysis, the FRFSM value is 0.9994. The stiffness sub-matrix parameters of the third to fifth elements after updating are shown in Table 3. It can be seen that the proposed method in this paper accurately identifies the location and the extent of damages for structures with local nonlinearity.
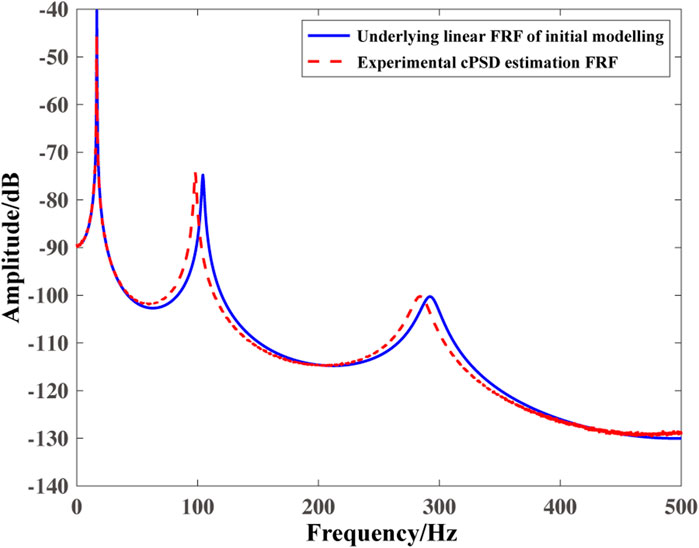
FIGURE 11. Comparison of underlying linear FRFs before model updating.
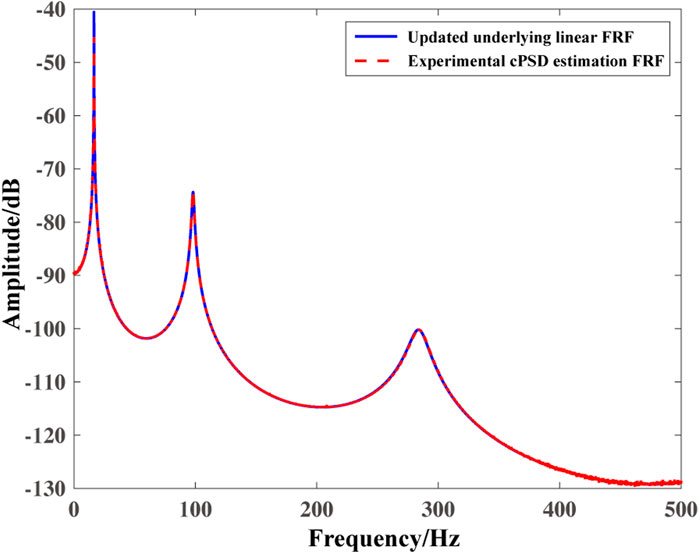
FIGURE 12. Comparison of underlying linear FRFs after model updating.

TABLE 3. Model updating results of sub-matrix parameters.
This paper proposes a novel two-stage model updating method for structures with local nonlinearities and applies it to structural damage identification. In the first stage, the method utilize the cRP method to extract the underlying linear FRF of tested structures, and then uses the FRFSM-based model updating objective function to conduct the constrained optimization process as the second stage. Simultaneously, based on the theoretical relationship between the FRF and the dynamic stiffness matrix, which is the inverse matrix of each other, the SMW formula is appropriately integrated into the model updating constrained optimization process. Owing to utilization of the sub-matrix parameterization and the symmetric Shur decomposition theorem in this paper, modification matrices at each iterative step during the optimization process can consistently meet the requirement of the SMW equation. Three numerical cases demonstrate that the proposed method can accurately identify the location and extent of damages in the presence of nonlinearities. Meanwhile, as an FRF-based model updating method, it has the advantages of not requiring frequency point selection, not depending on sensitivity, not recalling the initial finite element model, which avoids ill-conditioned issues and has high computational efficiency. Furthermore, benefiting from the excellent performance of the objective function for model updating, the proposed method is capable of achieving satisfactory results using even incomplete FRF data. Therefore, the method proposed in this paper can effectively and reliably conduct the tasks of model updating and damage identification in the structural health monitoring framework, and its application to more complex actual structures will be further expanded in subsequent research. Notably, nonlinearities discussed in this paper are belong to the weak nonlinearities. Additionally, research on the impact of noise is beyond the scope of this paper due to its involvement in nonlinear random vibration issues, but will also be a focus of future study.
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
HZ: Conceptualization, Data curation, Formal Analysis, Funding acquisition, Investigation, Methodology, Project administration, Resources, Software, Supervision, Writing–original draft, Writing–review and editing. DW: Formal Analysis, Resources, Supervision, Writing–review and editing. LZ: Project administration, Supervision, Writing–review and editing. LH: Project administration, Supervision, Writing–review and editing. LL: Funding acquisition, Supervision, Writing–review and editing. HQ: Funding acquisition, Supervision, Writing–review and editing. DL: Supervision, Writing–review and editing. JF: Supervision, Writing–review and editing.
The author(s) declare financial support was received for the research, authorship, and/or publication of this article. This research work is jointly supported by the National Natural Science Foundation of China (52078284), Guangdong Foundation for Program of Science and Technology Research (STKJ2023067), Foundation of Department of Housing and Urban-Rural Development of Jiangsu Province for Science and Technology Research (2023JH01008) and R&D Program of China Construction Second Engineering Bureau Co. Ltd. (2021ZX000001, 2021ZX000002, 2022QN000001, 2022ZX020001).
Authors HZ, DW, LZ, LH, LL, and HQ were employed by China Construction Second Engineering Bureau Co., Ltd.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The handling editor CXQ declared a past co-authorship with the author DL.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Akgun, M. A., Garcelon, J. H., and Haftka, R. T. (2001). Fast exact linear and non-linear structural reanalysis and the Sherman-Morrison-Woodbury formulas. Int. J. Numer. Methods Eng. 50, 1587–1606. doi:10.1002/nme.87
Arora, V., Adhikari, S., and Vijayan, K. (2023). FRF-based finite element model updating for non-viscous and non-proportionally damped systems. J. Sound. Vib. 552, 117639. doi:10.1016/j.jsv.2023.117639
Bendat, J. S., and Piersol, A. G. (2010). Random data: analysis and measurement procedures. Hoboken: John Wiley and Sons.
Cong, S., Hu, S., and Li, H. J. (2022). FRF-based pole-zero method for finite element model updating. Mech. Syst. Signal Process. 177, 109206. doi:10.1016/j.ymssp.2022.109206
da Silva, S., Cogan, S., and Foltête, E. (2010). Nonlinear identification in structural dynamics based on Wiener series and Kautz filters. Mech. Syst. Signal Process. 24, 52–58. doi:10.1016/j.ymssp.2009.05.017
Ewins, D. J., Weekes, B., and delli Carri, A. (2015). Modal testing for model validation of structures with discrete nonlinearities. Philos. Trans. R. Soc. A 373, 20140410. doi:10.1098/rsta.2014.0410
Friswell, M. I., and Mottershead, J. E. (1995). Finite element model updating in structural dynamics. Dordrecht: Springer-Science+Business Media.
Gang, X. Y., Chai, S., Allemang, R. J., and Li, L. (2014). A new iterative model updating method using incomplete frequency response function data. J. Sound. Vib. 333 (9), 2443–2453. doi:10.1016/j.jsv.2013.12.008
Golub, G. H., and van Loan, C. F. (2013). Matrix computations. 4th Edition. Baltimore: The Johns Hopkins University Press, 439–512.
Hassani, S., and Shadan, F. (2022). Using incomplete FRF measurements for damage detection of structures with closely-spaced eigenvalues. Measurement 188, 110388. doi:10.1016/j.measurement.2021.110388
Hou, R. R., and Xia, Y. (2022). Review on the new development of vibration-based damage identification for civil engineering structures: 2010-2019. J. Sound. Vib. 491, 115741. doi:10.1016/j.jsv.2020.115741
Huang, Y., and Ferguson, N. S. (2018). Identification of biomechanical nonlinearity in whole-body vibration using a reverse path multi-input-single-output method. J. Sound. Vib. 419, 337–351. doi:10.1016/j.jsv.2018.01.002
Kerschen, G., Lenaerts, V., and Golinval, J. C. (2003). VTT benchmark: application of the restoring force surface method. Mech. Syst. Signal Process. 17 (1), 189–193. doi:10.1006/mssp.2002.1558
Kerschen, G., Worden, K., Vakakis, A. F., and Golinval, J. C. (2006). Past, present and future of nonlinear system identification in structural dynamics. Mech. Syst. Signal Process. 20 (3), 505–592. doi:10.1016/j.ymssp.2005.04.008
Lee, D., Ahn, T. S., and Kim, H. S. (2018). A metric on the similarity between two frequency response functions. J. Sound. Vib. 436, 32–45. doi:10.1016/j.jsv.2018.08.051
Li, Q. K., Liao, M. F., and Jing, X. J. (2021). Transmissibility function-based fault diagnosis methods for beam-like engineering structures: a review of theory and properties. Nonlinear Dynam 106 (3), 2131–2163. doi:10.1007/s11071-021-06883-5
Li, W. X., Chen, S. Y., and Huang, H. (2023). System reduction-based approximate reanalysis method for statically indeterminate structures with high-rank modification. Structures 55, 1423–1436. doi:10.1016/j.istruc.2023.06.063
Lin, R. M. (2017). Function-weighted frequency response function sensitivity method for analytical model updating. J. Sound. Vib. 403, 59–74. doi:10.1016/j.jsv.2017.05.031
Lin, R. M., and Ewins, D. J. (1994). Analytical model improvement using frequency response functions. Mech. Syst. Signal Process. 8 (4), 437–458. doi:10.1006/mssp.1994.1032
Lin, R. M., and Zhu, J. (2006). Model updating of damped structures using FRF data. Mech. Syst. Signal Process. 20 (8), 2200–2218. doi:10.1016/j.ymssp.2006.05.008
Moaveni, B., He, X., Conte, J. P., and Restrepo, J. I. (2010). Damage identification study of a seven-story full-scale building slice tested on the UCSD-NEES shake table. Struct. Saf. 32 (5), 347–356. doi:10.1016/j.strusafe.2010.03.006
Noel, J. P., and Kerschen, G. (2017). Nonlinear system identification in structural dynamics: 10 more years of progress. Mech. Syst. Signal Process. 83, 2–35. doi:10.1016/j.ymssp.2016.07.020
Richards, C. M., and Singh, R. (1998). Identification of multi-degree-of-freedom non-linear systems under random excitations by the “reverse path” spectral method. J. Sound. Vib. 213 (4), 673–708. doi:10.1006/jsvi.1998.1522
Wang, X., Hill, T. L., Neild, S. A., Shaw, A. D., Haddad Khodaparast, H., and Friswell, M. I. (2018). Model updating strategy for structures with localised nonlinearities using frequency response measurements. Mech. Syst. Signal Process. 100, 940–961. doi:10.1016/j.ymssp.2017.08.004
Wu, Z. G., Yang, N., and Yang, C. (2015). Identification of nonlinear structures by the conditioned reverse path method. J. Aircr. 52 (2), 373–386. doi:10.2514/1.C032424
Zhan, M., Guo, Q. T., Yue, L., and Baoqiang, Z. (2019). Finite element model updating of jointed structure based on modal and strain frequency response function. J. Mech. Sci. Technol. 33 (10), 4583–4593. doi:10.1007/s12206-019-0902-0
Zhang, H., Li, D. S., and Li, H. N. (2020). Novel criterion for evaluation of stationarity in nonlinear structural dynamics. J. Aerosp. Eng. 33 (4), 06020001. doi:10.1061/(ASCE)AS.1943-5525.0001141
Zhang, M. W., Wei, S., Peng, Z. K., Dong, X., and Zhang, W. (2017). A two-stage time domain subspace method for identification of nonlinear vibrating structures. Int. J. Mech. Sci. 120, 81–90. doi:10.1016/j.ijmecsci.2016.11.008
Keywords: model updating, damage detection, nonlinear system identification, frequency response function, structural reanalysis
Citation: Zhang H, Wei D, Zhai L, Hu L, Li L, Qin H, Li D and Fan J (2023) A two-stage model updating method for the linear parts of structures with local nonlinearities. Front. Mater. 10:1331081. doi: 10.3389/fmats.2023.1331081
Received: 31 October 2023; Accepted: 30 November 2023;
Published: 14 December 2023.
Edited by:
Chun-Xu Qu, Dalian University of Technology, ChinaReviewed by:
Yabin Liang, China Earthquake Administration, ChinaCopyright © 2023 Zhang, Wei, Zhai, Hu, Li, Qin, Li and Fan. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Hao Zhang, bXpoYW5naGFvQG1haWwudHNpbmdodWEuZWR1LmNu; Dongsheng Li, bGlkc0BzdHUuZWR1LmNu
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.