 Alba Muixí1
Alba Muixí1 Sergio Zlotnik
Sergio Zlotnik Alberto García-González
Alberto García-González- 1Centre Internacional de Mètodes Numèrics a l’Enginyeria (CIMNE), Barcelona, Spain
- 2Laboratori de Càlcul Numèric (LaCàN), Universitat Politècnica de Catalunya, Barcelona, Spain
In the field of bone regeneration, insertion of scaffolds favours bone formation by triggering the differentiation of mesenchymal cells into osteoblasts. The presence of Calcium ions (Ca2+) in the interstitial fluid across scaffolds is thought to play a relevant role in the process. In particular, the Ca2+ patterns can be used as an indicator of where to expect bone formation. In this work, we analyse the inverse problem for these distribution patterns, using an advection-diffusion nonlinear model for the concentration of Ca2+. That is, given a set of observables which are related to the amount of expected bone formation, we aim at determining the values of the parameters that best fit the data. The problem is solved in a realistic 3D-printed structured scaffold for two uncertain parameters: the amplitude of the velocity of the interstitial fluid and the ionic release rate from the scaffold. The minimization in the inverse problem requires multiple evaluations of the nonlinear model. The computational cost is alleviated by the combination of standard Proper Orthogonal Decomposition (POD), to reduce the number of degrees of freedom, with an adhoc hyper-reduction strategy, which avoids the assembly of a full-order system at every iteration of the Newton’s method. The proposed hyper-reduction method is formulated using the Principal Component Analysis (PCA) decomposition of suitable training sets, devised from the weak form of the problem. In the numerical tests, the hyper-reduced formulation leads to accurate results with a significant reduction of the computational demands with respect to standard POD.
1 Introduction
Material-associated osteoinduction is the process by which steam cells differentiate into osteoblasts due to their interaction with the material conforming bone graft substitutes or scaffolds. Scaffolds are biocompatible structures that support bone formation when inserted into a proper physiological environment. The causes behind osteoinduction are not completely understood, and identifying the material properties that stimulate cell differentiation and favour bone regeneration is of major interest in tissue engineering. Some of the factors behind osteoinduction have been related to the architecture or morphology of the material (that is, its microstructure and porosity), its chemical composition, and the presence of calcium (Ca2+) and phosphate ions in the interstitial fluid (Ripamonti et al., 2007; Danoux et al., 2015; Habraken et al., 2016; Bohner et al., 2022). Also, Ca2+ gradients are related to cell migration and osteoinductive differentiation (Tang et al., 2018). Analysing the distribution of ions through scaffolds is therefore crucial to determine the effect that different physical and geometrical parameters can have on osteoinduction.
Numerical simulation enables to test different designs and compositions while reducing experimental costs, with the final objective of reducing in vivo and in vitro experimentation to a minimum (Santamaría et al., 2013; Guyot et al., 2014; Van hede et al., 2021). In this framework, a multiparametric advection-diffusion nonlinear model for the concentration of Ca2+ ions across calcium phosphate scaffolds is proposed in Muixí et al. (2022). The Ca2+ steady-state distribution is there viewed as an indicator of where to expect bone formation for different material configurations. Actually, the highly-crowded regions in the numerical simulations qualitatively agree with the patterns of bone growth in experimental observations by Barba et al. (2017). The model in Muixí et al. (2022) accounts for six physical parameters which are difficult to estimate, related to the diffusivity of the ions, the velocity and the viscosity of the interstitial fluid and the release rate of ions from the scaffold. The value of each parameter ranges in a large interval accounting for uncertainty in the input data.
The goal of this work is to study the associated inverse problem: given a set of observables or observational data for a final Ca2+ distribution, we aim to identify the value of the parameters in the model that best fit the observations. With this, we would be able to estimate the value of uncertain parameters given the experimental outcome for some configuration. This is done through the definition of a cost functional that quantifies the misfit between the outcome of the simulation and the observables. The minimization of this functional requires multiple evaluation of the parametric model, which leads to a high computational cost. For illustrative purposes, we restrict ourselves to the identification of two parameters: the velocity amplitude of the interstitial fluid and the release rate of Ca2+ from the scaffold, which are the parameters leading to more differentiated patterns.
The numerical efforts in the minimization can be reduced with a Reduced Order Modelling (ROM) formulation of the problem. Here, we apply the widely used Proper Orthogonal Decomposition (POD) (Berkooz et al., 1993; Patera and Rozza, 2007; Quarteroni and Rozza, 2014; Díez et al., 2021). POD discovers a linear space of low dimension embedding the manifold of parametric solutions by doing a Principal Component Analysis (PCA) of a precomputed family of solutions (the training set). Afterwards, the PCA low-order basis is used to approximate the solution in subsequent evaluations of the model, significantly reducing the number of degrees of freedom.
Nevertheless, in the case of nonlinear models, POD fails to drastically reduce the computational cost. In a standard POD formulation, we first build the full-order system of equations and then project it into the PCA reduced space. For nonlinear systems, this means assembling a full-order system at every iteration of, for instance, the Newton’s method scheme. To remedy this issue, several hyper-reduction methods have been proposed, including the Discrete Empirical Interpolation Method (DEIM) (Chaturantabut and Sorensen, 2010; Negri et al., 2015), the Best Points Interpolation Method (BPIM) (Nguyen and Peraire, 2008), among others. Here, the POD is combined with an adhoc hyper-reduction technique to estimate the nonlinear contributions, which is also based in the PCA of suitable training sets and offers an easy-to-implement strategy to build the reduced systems in the Newton’s formulation of the problem.
This paper is structured as follows. In Section 2, the forward and the inverse problems are presented, as well as the employed reduced-order methodology. The POD formulation is summarized in Section 2.2.1 and the adhoc hyper-reduction technique is described in 2.2.2. In Section 3, numerical results for the inverse problem are shown in a realistic domain, based on a 3D-printed calcium phosphate structured scaffold. Finally, the main results and the limitations of the strategy are discussed in Section 4.
2 Materials and methods
2.1 Problem statement
We consider the multiparametric advection-diffusion nonlinear model proposed in Muixí et al. (2022) for the concentration of Ca2+ in the interstitial fluid that passes through a scaffold. The model accounts for the scaffold releasing ions in the interstitial fluid and the fluid dragging them, changing the concentration distribution. Bone formation is expected in regions with a high concentration of Ca2+. Here, the parametrisation is given by the velocity amplitude of the fluid, υ, and the Ca2+ release rate from the scaffold into the surrounding fluid, r, which are parameters with a significant effect on the amount of expected bone formation.
We aim to infer the value of the parameters, υ and r, given a set of observables (or outcomes) associated to the concentration of Ca2+, by solving the corresponding inverse problem. The multiple model evaluation needed to solve the inverse problem motivates the use of a ROM technique to accelerate the computation. Due to the nonlinear character of the model, we combine the Proper Orthogonal Decomposition (POD) to reduce the dimension of the systems, with an adhoc hyper-reduction strategy to make the assembly process more efficient.
The problem is solved in a realistic domain based on a 3D-printed structured calcium phosphate scaffold, see Figure 1. This geometry was first developed and experimentally tested for osteoinduction in intramuscular implantation by Barba et al. (2017). The scaffold has a geometrically structured distribution, with regular pores with an average size of 289 μm and a porosity of 54.1%. We consider a representative volume of dimensions 1930 × 2040 × 1960μm3.
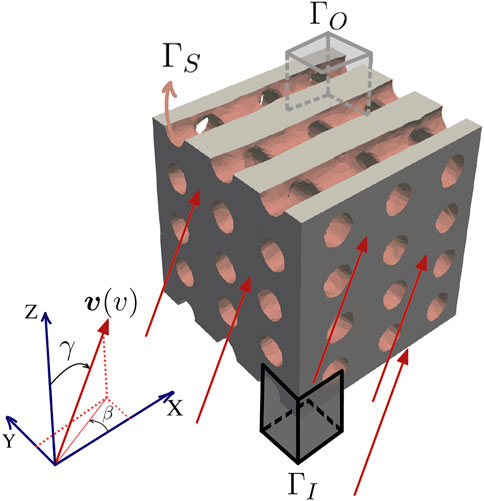
FIGURE 1. Domain for the interstitial fluid across a representative volume of the 3D-printed structured scaffold. The three dark grey faces (through the origin) mark the inlet faces, ΓI, where Dirichlet conditions are set to 0. The opposite light grey faces correspond to the outlet, ΓO. Light red surfaces indicate the scaffold-fluid interface, ΓS, where the release Robin conditions are imposed.
2.1.1 Forward problem and parametrization
The steady nonlinear advection-diffusion problem reads
where c is the adimensional concentration of Ca2+ (normalized to the maximum value of 1), and Ω ⊂ IR3 is the domain through the scaffold occupied by the intersitital fluid. The boundary ∂Ω is partitioned into
On the inlet ΓI, Dirichlet boundary conditions are set to zero to simulate the entry of clean interstitial fluid in the domain and to avoid upstream diffusion against the flow direction. On the outlet ΓO, homogeneous Neumann boundary conditions are imposed. On ΓS, which is the solid-fluid interface, we impose Robin boundary conditions with ionic release rate r. A higher (positive) value of r implies a faster relase of ions from the scaffold into the fluid. Note that the Robin condition sets a saturation concentration of c = 1. For this analysis, r is parametrised in the range Ir = [5, 20]μm/s.
The expression for the concentration-dependent diffusivity ν(c) is
where DSE is the constant Stokes-Einstein diffusion coefficient for Ca2+, obtained as
with kB = 1.38 ⋅ 10–23 JK−1 the Boltzmann constant, T = 37°C the temperature, ρ = 114 pm the ionic radius of Ca2+ (Manhas et al., 2017) and η = 1.2 ⋅ 10–3 Pa⋅s the viscosity of the fluid, which is taken in the range of blood plasma’s viscosity (Késmárky et al., 2008). With the diffusivity law in (Eq. 2), an increase in the concentration c implies a decrease in the diffusivity. Actually, diffusivity is reduced by one order of magnitude in fully crowded regions (where c = 1), when compared to regions without Ca2+ (where c = 0).
The advection velocity υ is an input for the problem. It is expressed as a combination of normalized velocity fields υx, υy and υz, coming from potential flows in X, Y and Z directions, respectively, that is
with υ the velocity amplitude and combination angles
The intervals for the two parameters, namely Ir and Iυ, are chosen in Muixí et al. (2022) by numerical experimentation, covering cases in which the final distribution presents highly differentiated patterns.
2.1.2 Newton’s method formulation
The nonlinear Boundary Value Problem (BVP) (Eq. 1) is solved using Newton’s method. Given an initial guess to the solution, c0, we seek a succession of approximations ck+1 = ck + δc for k = 0, 1, … until convergence. For parameters υ and r, the weak form of the kth Newton iteration reads: given an approximation ck ∈ V, with
with
and then set ck+1 = ck + δc. We use the notation
The discretization of (Eq. 5) leads to a system of the form
with ck and δc the vectors of nodal values for ck and δc, respectively, and μ = (υ, r) the parameters in the model. Convergence is reached when both the relative values of the Euclidean norm of δc and of the residual f(ck; μ) are below some tolerance, here set to 10–6. Due to the nonlinear dependence on c of the weak form of the problem (Eq. 6), the system has to be assembled at every iteration k. In order to effectively reduce the cost, we reduce the number of unknowns in (Eq. 7) using POD. In a nonlinear context, POD reduction is not sufficient and in order to properly approximate the nonlinear contributions in K(ck; μ) and f(ck; μ), an adhoc hyper-reduction technique is devised in Section 2.2.
2.1.3 Observables
Regions with high concentrations of Ca2+ are the regions where we expect bone formation. Actually, in Muixí et al. (2022), highly-concentrated regions present qualitatively similar patterns to those of bone growth in the experiments by Barba et al. (2017). Thus, we assume that the amount of formed bone for a parametric setting is characterized through the volumes of regions with a minimum Ca2+ concentration and the total concentration in the domain.
We define four observables, or quantities of interest, for a given concentration field c. Three observables account for the relative volumes occupied with minimum concentration thresholds β = 0.1, 0.5 and 0.9, namely
where
The normalized total concentration of Ca2+ in the domain is computed as
where the normalization accounts for the maximum value of concentration, c = 1, as stated by the Robin boundary condition on ΓS in the system of Eq. 1.
The vector containing the observables for a given concentration field c(υ, r) is denoted by
Note that these four observables are adimensional and take values between 0 and 1.
2.1.4 Inverse problem
The inverse problem consists in identifying the parameters υ and r that minimize the discrepancy between some given observables V∗ and the outcome of the parametric model V(υ, r). This discrepancy is quantified through the functional
where ‖⋅‖ stands for the Euclidean norm. Thus, the inverse problem over the parametric space reads: given V∗, find υ∗ ∈ Iυ and r∗ ∈ Ir such that
The minimization requires multiple evaluations of the forward problem (Eq. 1), corresponding to different values of the parameters. The numerical methodology described in Section 2.2 aims at making this computation efficient.
2.2 Numerical methodology
The multiple evaluations required in solving the inverse problem (Eq. 13) call for the use of a reduced-order strategy to reduce the computational cost. For any given parameters μ = (υ, r), the solution is computed with the Newton’s method, iteratively solving the linear system of Eq. 7 until convergence. In order to make each evaluation more efficient, we propose:
• using the Proper Orthogonal Decomposition (POD) to reduce the number of unknowns in Eq. 7, and
• approximating the nonlinear contributions in K(ck; μ) and f(ck; μ) with an adhoc hyper-reduction technique, thus avoiding the assembly of the full-order system at every iteration.
2.2.1 Proper orthogonal decomposition
Solutions of a parametric problem with np parameters lie in a manifold of low dimension, equal to the number of independent parameters, which is embedded in the larger space
The training set is defined as the solutions of the nonlinear full-order problem (Eq. 1) corresponding to a representative sampling of the parametric space, given by μi for i = 1, …, nS, with nS < nd. These solutions or snapshots are denoted by xi = c(μi). Snapshots are centered as
for i = 1, …, nS, where
Centered snapshots are then collected in a matrix
Centering the snapshots is recommended to improve the numerical properties of PCA.
The PCA, which is based on the Singular Value Decomposition (SVD), is used to eliminate redundancies in X. The SVD of X reads
with
for some tolerance ɛ. The linear space spanned from the nk first columns of U, assembled in a matrix
For a new parametric point μ which is not in the training set, the solution c is approximated by
for some coefficients
in the nd × nd system of Eq. 7, with z the new vector of unknowns. The POD reduced system becomes
which is a system with nk equations and nk unknowns.
2.2.2 Adhoc hyper-reduction strategy based on PCA
The nk × nk POD reduced system (21) depends on the solution ck from the previous iteration in the Newton scheme, as well as on the parameters of the model μ = (υ, r). Using standard POD, we need to assemble the full-order K (ck; μ) and f(ck; μ) at every iteration of the Newton scheme, as the approximation of the solution ck is updated, and then reduce them by multiplying by
In order to circumvent the computational expense from assembling the full-order system at every iteration, we propose an adhoc hyper-reduction strategy to approximate the nonlinear contributions in K(ck; μ) and f(ck; μ). Following the same philosophy as in POD, we aim to approximate the nonlinear contributions as a linear combination of reduced precomputed matrices and vectors, of dimension nk × nk and nk × 1, respectively. These matrices and vectors are assembled from the PCA reduced bases of suitable training sets, which are defined next based on the expressions of the bilinear forms in the Newton weak formulation (Eq. 5).
All terms in formulation (Eq. 5) are linear with respect to ck, ν(ck) or ν(ck)
To simplify the notation, we define
and
The nodal evaluation of these expressions leads to vectors
In the Newton’s algorithm, matrices and vectors that are linear with respect to ck are approximated using the POD approximation of ck in (Eq. 19), which is obtained from the snapshots xi, with i = 1, …, nS, through the PCA decomposition of the training set matrix
First, we consider yi = y(xi), for i = 1, …, nS, computed by the nodal evaluation of the diffusivity law (Eq. 2). Following the same notation as in Section 2.2.1, these vectors are centered with mean
The SVD decomposition of Y leads to
where zY is computed as
Similary, we define gi = g(xi), for i = 1, …, nS. These snapshots are centered with mean
With analogous notation, the nodal vector gk = g(ck) is approximated by
with
Approximation of the reduced matrix
Denoting by Aj the matrix associated to the form aj in (Eq. 5), with j = 1, …, 4, we are able to split the contributions in the matrix of the system as
Note that matrices A1 and A2 have to be updated at every iteration k of the Newton scheme. On the contrary, matrices A3 and A4 depend only on the parameters and remain constant. The dependence on μ is omitted for the sake of clarity. Equivalently, the nk × nk matrix in the POD reduced system (Eq. 21) reads
with
From the expression for a1 in (Eq. 6), matrix
Matrices
Matrix
in this case, using the PCA reduced space for training set G since the bilinear form a2 (Eq. 6) is linear with respect to gk.
By approximating the Jacobian, the convergence of Newton’s method slightly deteriorates and it needs more iterations. Nevertheless, we still experience an improvement in efficiency: instead of assembling the finite element nd × nd matrix at every iteration, we compute the projections zY and zG and approximate the system matrix as a linear combination of precomputed matrices of dimension nk × nk, with nk ≪ nd. Moreover, in our experience, approximating the Jacobian leads to the same accuracy for POD than assembling the full-order matrices, as discussed in Section 3.
Approximation of the reduced vector
We denote by fj the right-hand side vector associated to the form aj in (Eq. 5), with j = 1, 3, 4. The vector of the system is
where each term can be computed as
The POD reduction of the system leads to the system vector
Note that
which follows from approximating the solution by (Eq. 19). The contributions related to
All nk-dimensional vectors in combination (Eq. 40) are also computed and stored as a preprocess.
It is worth mentioning that, in some implementations, assembling the vector on the right-hand side is very efficient. In this cases, we recommend to approximate the system matrix as described above while assembling the full-order system vector at every iteration of the Newton scheme, since approximating the residual implies a loss of accuracy in the POD solution, as explained in Section 3.
2.2.3 Algorithmic description
In this section, we summarize the steps of the ROM strategy described in Sections 2.2.1, 2.2.2 to solve nonlinear problem (Eq. 1). We distinguish an offline phase and an online (real-time) phase. The offline phase is executed once, given a sampling of the parametric space and a tolerance ɛ. It consists of the computation of the three training sets (X, Y and G), the corresponding PCA dimensionality reductions and the computation of the reduced matrices
Algorithm 1. Offline phase.
Input: Sampled parameters μi = (vi, ri), for i = 1, …, nS, tolerance ɛ
POD approximation
1: Compute the snapshots xi by solving the full-order problem K(ci; μi) xi = f(μi), for i = 1, …, nS
2: Center the snapshots and assemble them in matrix X as in (16)
3: dimensionality reduction of X: from the SVD factorization X = UΣVT, choose nk by applying criterion (18) and define U⋆ with the first nk columns of U
Additional training sets
4: Build matrix Y as in (25)
5: PCA dimensionality reduction of Y: from the SVD factorization of Y, choose nkY by applying criterion (18) and define
6: Build matrix G as in (28)
7: PCA dimensionality reduction of G: from the SVD factorization of G, choose nkG by applying criterion (18) and define
Save reduced matrices and vectors
8: Compute and store the nk × nk matrices
9: Compute and store the the nk × 1 vectors
Output: matrices U⋆,
Algorithm 2. Online phase.
Input: new parametric point μ, matrices U⋆,
Newton iterative scheme
1: Set k = 0 and take c0 as the closest snapshot in the parametric space
2: Assemble A3 and reduce
3: Assemble A4 and reduce
4: Compute
5: Assemble f4(1; r) and reduce
6: while stopping criterion is not satisfied do
7: Compute
8: Compute
9: Compute
10: Compute
11: Compute
12: Solve the reduced system Az = f
13: Compute δc = U⋆z and ck+1 = ck + δc
14: if ‖δc‖2 < tol then
15: Stop iterating
16: else
17: k = k + 1
18: end if
19: end while
Output: reduced-order solution ck+1 ≃c(μ)
3 Results
This section assesses the performance of the ROM strategies described in Section 2.2 to approximate the solution of the inverse problem in (Eq. 13). First, we show the accuracy of standard POD for the forward problem in Section 3.1. The hyper-reduced POD formulation is tested in Section 3.2. Finally, the inverse problem is solved in Section 3.3 for some values of the parameters.
Throughout the section, the values for the amplitude υ and the release rate r are expressed in μm/s. The tolerance for convergence of the Newton scheme is set to 10–6, and the initial approximation is taken as the closest snapshot in the training set (closeness is measured with Euclidean distance in the parametric space). The truncation tolerance in criterion (Eq. 18) to approximate the solution in (Eq. 20) is ɛ = 10–3. All errors are measured with the relative Euclidean norm with respect to the full-order finite element (FE) solution. Computations are performed using the open-source solver FEniCS (Alnaes et al., 2015; Langtangen and Logg, 2017).
3.1 POD for the forward problem (without hyper-reduction)
We test the accuracy of a standard POD approximation for the forward problem in (Eq. 1), as described in Section 2.2.1. The FE discretization of the domain leads to full-order solutions with dimension nd = 45,542. The goal is to reduce the number of degrees of freedom from nd to nk, using the PCA reduced space of a training set X (Eq. 16). In this case, we assemble the full-order nd × nd matrices K (ck; μ) and vectors f (ck; μ) at every iteration k of the Newton scheme, and we project them into the reduced space as in (21). This is, even though we assemble the full-order system, we end up solving a nk × nk system at every iteration.
We consider three training sets with 16, 42 and 208 snapshots. These correspond to all possible combinations of parameters in the following sets:
1) 16 snapshots: υ ∈ {1, 20, 40, 60}, r ∈ {5, 10, 15, 20},
2) 42 snapshots: υ ∈ {1, 10, 20, …, 60}, r ∈ {5, 8, 11, …, 20},
3) 208 snapshots: υ ∈ {1, 5, 10, …, 60}, r ∈ {5, 6, 7, …, 20}.
The PCA dimensionality reduction of these training sets with tolerance ɛ = 10–3 leads to reduced dimensions nk = 12, 16 and 18, respectively. The reduction in the number of degrees of freedom is significant in the three cases, from nd = 45,542 to nk ≪ nd.
Table 1 shows the relative errors obtained with the three training sets, for the nodal solution and two of the observables, V0.9 and VT, when approximating the solutions corresponding to some parameters which are not in the training sets, namely, for (v, r) = (12, 18.5) (25, 9.5) and (53, 6.5). As expected, errors on the nodal solution decrease with the number of snapshots in the training set: for the poorer training set errors are of the order of 10–3, while for the most-populated training set errors become of the order of 10–5. We observe a similar behaviour for the observables when computed from the reduced-order solutions. However, the definition of V0.9 using a threshold value accentuates the discrepancies between the reduced-order and the reference full-order solution.
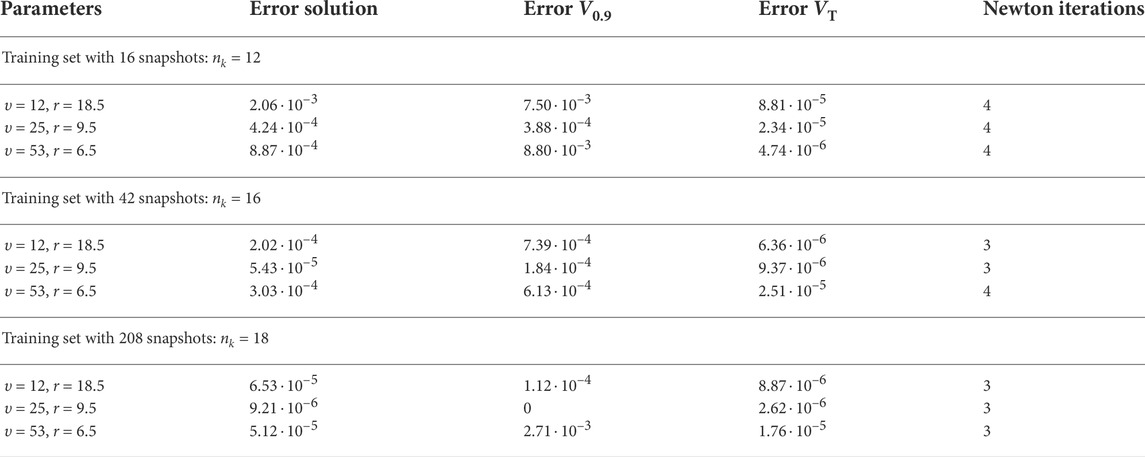
TABLE 1. Relative errors and number of Newton iterations of standard POD when solving the BVP in (Eq. 1). Training sets with 16, 42 and 208 snapshots are used to approximate solutions for parameters (υ, r) = (12, 18.5) (25, 9.5) and (53, 6.5). The truncation tolerance in POD is ɛ = 10–3, and the tolerance for convergence in the Newton scheme is 10–6.
The accuracy is remarkable in all cases given the number of snapshots. Also, note that the number of Newton iterations needed to converge is below five in all cases. These results validate the suitability of POD to solve the forward problem.
3.2 Performance of the hyper-reduction strategy
Next, we use the hyper-reduction strategy presented in Section 2.2.2 to assemble the system in the POD formulation. We consider the intermediate training set with 42 snapshots, reducing the number of degrees of freedom to nk = 16.
Test 1: Hyper-reduction of (only) the matrix
The first test consists in hyper-reducing only the Jacobian in the Newton formulation, while keeping the standard POD assembly and projection of the residual. This is, we approximate the nonlinear dependences on ck in matrix K(ck; μ) with the hyper-reduction strategy based on tranining sets Y and G, but the full-order vector f(ck; μ) is assembled at every iteration of the Newton scheme.
The accuracy of the hyper-reduced formulation is compared with that of standard POD in Table 2 for the previous parametric points (v, r) = (12, 18.5), (25, 9.5) and (53, 6.5). We take different truncation tolerances in the matrix approximations (Eq. 34) and (Eq. 35). We consider the approximation of A1 and A2 given by only their evaluation on the means
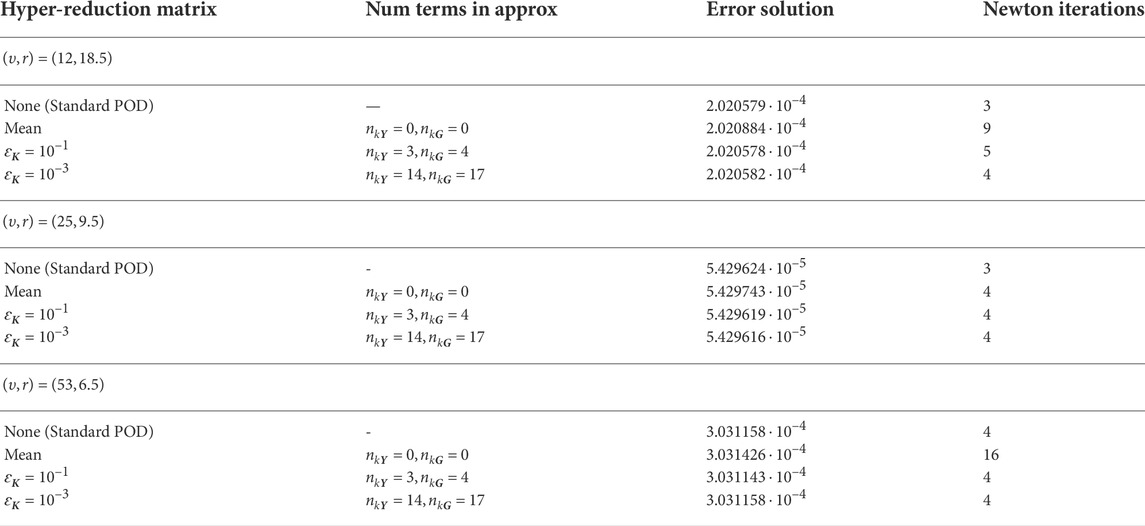
TABLE 2. Relative errors and number of Newton iterations when approximating only the matrix in the POD formulation with hyper-reduction. The hyper-reduction takes nkY and nkG terms in approximations (Eq. 34) and (Eq. 35) for A1 and A2, respectively. Solutions corresponding to parameters (υ, r) = (12, 18.5), (25, 9.5) and (53, 6.5). Training set with 42 snapshots, which leads to reduced systems of dimension nk = 16.
Note that all options lead to the same relative error in the reduced-order solution up to (at least) 7 decimals. Indeed, the accuracy of the solution is dictated by the residual of the system, which here is computed with the standard POD approach. The number of iterations needed to converge increases for rough approximations of the matrix. In particular, we observe the highest number of iterations when the matrix is approximated by its mean. However, we remark that in this case the scheme less computationally demanding.
Indeed, for nkY > 0 and nkG > 0, the coefficients in the linear combination of terms are updated as the solution of the Newton scheme is modified. The computational expense of assembling a full-order matrix at every iteration is replaced by the computation of yk = y (ck) and gk = g (ck) and the linear combination of precomputed nk × nk matrices. Contrarily, approximating the matrices for their evalution on the means implies taking a constant matrix for all iterations k of the Newton scheme, with no additional computations.
Test 2: Hyper-reduction of the vector
From the previous test, we deduce that the hyper-reduced approximation of the matrix is robust in terms of accuracy. Next, we study the effect of applying the hyper-reduction strategy to the right-hand side vector, approximating the contribution of
Approximating the residual is more critical since we may converge to a different solution. Accuracy is then affected by both the POD approximation of the solution and the approximation of the residual. Table 3 lists the errors and the number of Newton iterations for the previous parametric points, when using standard POD and for the hyper-reduced residual formulation with tolerance ɛf = 10–3. For the matrix, we consider its approximation using the mean values
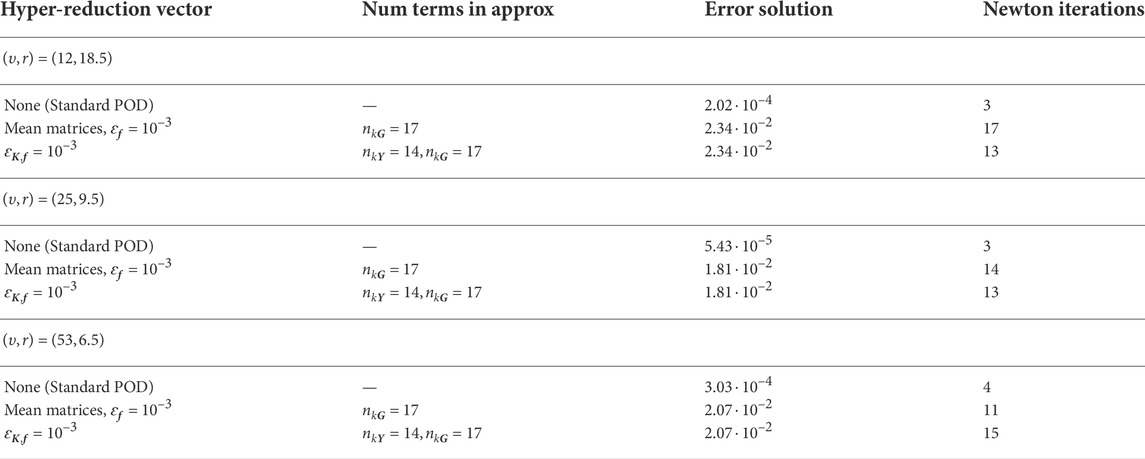
TABLE 3. Relative errors and number of Newton iterations when approximating the matrix and the vector in the POD formulation with hyper-reduction, with tolerance ɛf for the vector and mean matrices, and tolerance ɛK,f for approximating both the matrix and the vector. Solutions corresponding to parameters (υ, r) = (12, 18.5) (25, 9.5) and (53, 6.5). Training set with 42 snapshots.
We observe again that the accuracy of the reduced-order solution is determined by the approximation of the residual. With the same tolerance ɛf, we obtain the same relative error for both approximations of the matrix. As expected, errors increase when approximating the residual: for standard POD errors are of the order of 10–4, while errors from the hyper-reduced formulation are of the order of 10–2. The number of Newton iterations also increases, being below 20 in all cases. However, it is worth mentioning that we avoid assembling the full-order matrices and vectors, which is beneficial in terms of efficiency.
3.3 Inverse problem: Parameter identification
We define V* as the observables computed from the full-order FE solution for parameters υ = 35 and r = 12.5. We aim at recovering an approximation for the parameters, υ⋆ and r⋆, by solving the corresponding inverse problem (Eq. 13). In order to minimize the discrepancy functional
In the Fenics implementation, assembling and projecting the residual of the system is very efficient. Thus, in our case, the most suitable option is to hyper-reduce the matrix, approximating the nonlinear dependences on ck by their evaluation on the means
Figure 2A shows the value of the functional
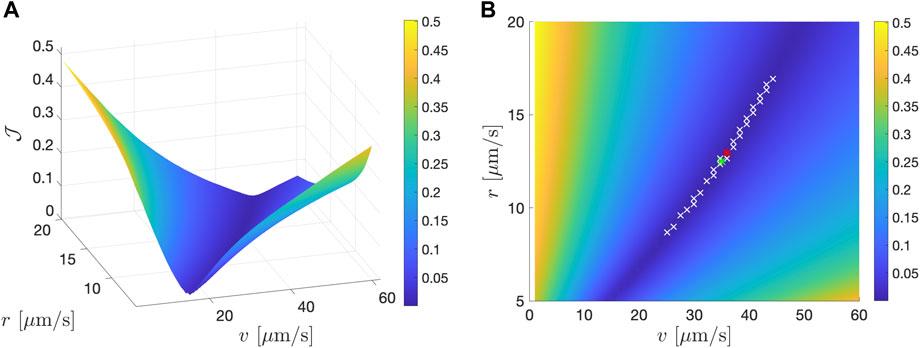
FIGURE 2. (A) Discrepancy functional
We repeat the process by minimizing with respect to each one of the parameters separately. First, we fix r = 12.5 and discretize Iυ with 50 equispaced points. The value of the functional with respect to υ is plotted in Figure 3A. In this case, the minimization problem is well-defined, and leads to the opitmal υ* = 34.7143. Setting υ = 35 and discretizing for r, the minimum is also optimal, r* = 12.6531, Figure 3B.
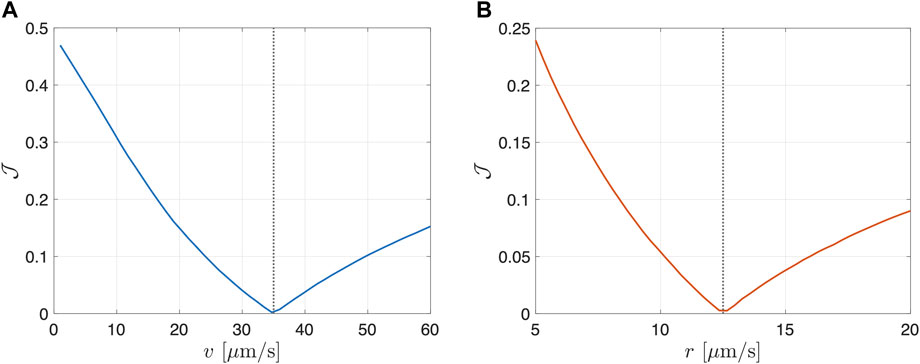
FIGURE 3. (A) Discrepancy functional
4 Discussion and conclusion
We solve the inverse problem associated to the Ca2+ concentration in the intersitital fluid across a realistic 3D-printed structured scaffold. Given the values of some observables that characterize the expected bone formation, we aim at recovering the value of two parameters: the velocity amplitude, υ, and the ionic release rate from the scaffold, r.
The nonlinearity of the model and the multiple evaluations required to solve the inverse problem motivate the definition of a ROM strategy. We combine POD, to reduce the number of degrees of freedom, with a novel adhoc hyper-reduction strategy to accelerate the assembly of the full-order system at every iteration of the Newton method. The hyper-reduction is based on the PCA reduction of two additional training sets, which are derived from the weak form of the problem at hand. The idea is to approximate the nonlinear contributions in the matrices and vectors in the Newton scheme by linear combinations of precomputed matrices and vectors of reduced dimension. The formulation is exclusive for this problem, but it can be easily extended to other nonlinear problems with a suitable definition of the training sets. This strategy is applicable in cases in which the nonlinearity is explicitly described in the equations.
From the numerical tests, we conclude that the accuracy of the reduced-order solution is only dictated by the hyper-reduction of the vector of the system. For a fixed approximation of the residual, we obtain the same accuracy independently of the number of terms in the approximation of the Jacobian. In particular, replacing the nonlinear contributions of the matrix by their evaluation on the mean of the training sets is a competitive option in terms of accuracy and efficiency. The hyper-reduction of the matrix increases the number of Newton iterations needed to converge, but it still implies a gain in efficiency since the assembly of the full-order system is avoided. The hyper-reduction of the residual is more critical since it affects the accuracy of the reduced-order solution. However, we still obtain reasonable errors below 5%.
The solution of the inverse problem indicates a relation between the two parameters, υ and r. In order to obtain a well-posed minimization problem, we need to fix one of them and minimize with respect to the other. However, from a practical point of view, obtaining a relation between the parameters (instead of some unique values) that lead to the desired observables is also of interest.
Data availability statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author contributions
AM, SZ, AG-G, and PD worked on the conceptualisation, methodology and formal analysis. AM and AG-G worked on the investigation. AM wrote the draft of the manuscript. AG-G, SZ, and PD contributed to project supervision, manuscript revision, read and approved submitted version.
Funding
The authors acknowledge the financial support from the Ministerio de Ciencia e Innovación (MCIN/AEI/10.13039/501100011033) through the grants PID2020-113463RB-C32, PID2020-113463RB-C33 and CEX2018-000797-S.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Alnaes, M. S., Blechta, J., Hake, J., Johansson, A., Kehlet, B., Logg, A., et al. (2015). The FEniCS project version 1.5. Arch. Numer. Softw. 3. doi:10.11588/ans.2015.100.20553
Barba, A., Diez-Escudero, A., Maazouz, Y., Rappe, K., Espanol, M., Montufar, E. B., et al. (2017). Osteoinduction by foamed and 3D-printed calcium phosphate scaffolds: effect of nanostructure and pore architecture. ACS Appl. Mater. Interfaces 9, 41722–41736. doi:10.1021/acsami.7b14175
Berkooz, G., Holmes, P., and Lumley, J. L. (1993). The proper orthogonal decomposition in the analysis of turbulent flows. Annu. Rev. Fluid Mech. 25, 539–575. doi:10.1146/annurev.fl.25.010193.002543
Bohner, M., Maazouz, Y., Ginebra, M.-P., Habibovic, P., Schoenecker, J., Seeherman, H., et al. (2022). Sustained local ionic homeostatic imbalance (SLIHI) caused by calcification modulates inflammation to trigger ectopic bone formation. Acta Biomater. 145, 1–24. doi:10.1016/j.actbio.2022.03.057
Chaturantabut, S., and Sorensen, D. (2010). Nonlinear model reduction via discrete empirical interpolation. SIAM J. Sci. Comput. 32, 2737–2764. doi:10.1137/090766498
Danoux, C., Bassett, D., Othman, Z., Rodrigues, A., Reis, R., Barralet, J., et al. (2015). Elucidating the individual effects of calcium and phosphate ions on hmscs by using composite materials. Acta Biomater. 17, 1–15. doi:10.1016/j.actbio.2015.02.003
Díez, P., Muixí, A., Zlotnik, S., and García-González, A. (2021). Nonlinear dimensionality reduction for parametric problems: a kernel proper orthogonal decomposition. Int. J. Numer. Methods Eng. 122, 7306–7327. doi:10.1002/nme.6831
Guyot, Y., Papantoniou, I., Chai, Y. C., Van Bael, S., Schrooten, J., Geris, L., et al. (2014). A computational model for cell/ECM growth on 3D surfaces using the level set method: a bone tissue engineering case study. Biomech. Model. Mechanobiol. 13, 1361–1371. doi:10.1007/s10237-014-0577-5
Habraken, W., Habibovic, P., Epple, M., and Bohner, M. (2016). Calcium phosphates in biomedical applications: materials for the future? Mater. Today 19, 69–87. doi:10.1016/j.mattod.2015.10.008
Késmárky, G., Kenyeres, P., Rábai, M., and Tóth, K. (2008). Plasma viscosity: a forgotten variable. Clin. Hemorheol. Microcirc. 39, 243–246. doi:10.3233/CH-2008-1088
Langtangen, H. P., and Logg, A. (2017). Solving PDEs in Python. The FEniCS tutorial. Springer. doi:10.1007/978-3-319-52462-7
Manhas, V., Guyot, Y., Kerckhofs, G., Chai, Y. C., and Geris, L. (2017). Computational modelling of local calcium ions release from calcium phosphate-based scaffolds. Biomech. Model. Mechanobiol. 16, 425–438. doi:10.1007/s10237-016-0827-9
Muixí, A., Zlotnik, S., Calvet, P., Espanol, M., Lodoso-Torrecilla, I., Ginebra, M.-P., et al. (2022). A multiparametric advection-diffusion reduced-order model for molecular transport in scaffolds for osteoinduction. Biomech. Model. Mechanobiol. 21, 1099–1115. doi:10.1007/s10237-022-01577-2
Negri, F., Manzoni, A., and Amsallem, D. (2015). Efficient model reduction of parametrized systems by matrix discrete empirical interpolation. J. Comput. Phys. 303, 431–454. doi:10.1016/j.jcp.2015.09.046
Nguyen, N., and Peraire, J. (2008). An efficient reduced-order modeling approach for non-linear parametrized partial differential equations. Int. J. Numer. Methods Eng. 76, 27–55. doi:10.1002/nme.2309
Patera, A. T., and Rozza, G. (2007). Reduced basis approximation and A-posteriori error estimation for parametrized partial differential equations. Cambridge, MA, USA: MIT Pappalardo Graduate Monographs in Mechanical Engineering, Massachusetts Institute of Technology.
Quarteroni, A., and Rozza, G. (2014). Reduced order methods for modeling and computational reduction, 9. Springer. doi:10.1007/978-3-319-02090-7
Ripamonti, U., Richter, P. W., and Thomas, M. E. (2007). Self-inducing shape memory geometric cues embedded within smart hydroxyapatite-based biomimetic matrices. Plastic Reconstr. Surg. 120, 1796–1807. doi:10.1097/01.prs.0000287133.43718.89
Santamaría, V. A. A., Malvè, M., Duizabo, A., Tobar, A. M., Ferrer, G. G., Aznar, J. G., et al. (2013). Computational methodology to determine fluid related parameters of non regular three-dimensional scaffolds. Ann. Biomed. Eng. 41, 2367–2380. doi:10.1007/s10439-013-0849-8
Tang, Z., Li, X., Tan, Y., Fan, H., and Zhang, X. (2018). The material and biological characteristics of osteoinductive calcium phosphate ceramics. Regen. Biomater. 5, 43–59. doi:10.1093/rb/rbx024
Keywords: reduced-order models, parameter identification, inverse problem, proper orthogonal decomposition, hyper-reduction, scaffold, osteoinduction
Citation: Muixí A, Zlotnik S, García-González A and Díez P (2022) Physics-based manifold learning in scaffolds for tissue engineering: Application to inverse problems. Front. Mater. 9:957877. doi: 10.3389/fmats.2022.957877
Received: 31 May 2022; Accepted: 12 July 2022;
Published: 03 October 2022.
Edited by:
Chady Ghnatios, Notre Dame University—Louaize, LebanonReviewed by:
Ilige Hage, Notre Dame University—Louaize, LebanonIvan Giorgio, University of L'Aquila, Italy
Copyright © 2022 Muixí, Zlotnik, García-González and Díez. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Alberto García-González , YmVydG8uZ2FyY2lhQHVwYy5lZHU=