 Ying Zhou1,2
Ying Zhou1,2 Xinjian Wang
Xinjian Wang- 1Navigation College, Dalian Maritime University, Dalian, China
- 2Key Laboratory of Navigation Safety Guarantee of Liaoning Province, Dalian Maritime University, Dalian, China
- 3Liverpool Logistics, Offshore and Marine (LOOM) Research Institute, Liverpool John Moores University, Liverpool, United Kingdom
- 4Seafarers Research Institute, Dalian Maritime University, Dalian, China
- 5Maritime Safety Administration, Ministry of Transport, Beijing, China
To address human errors in collision avoidance tasks of remotely controlled ships, this study aims to develop a comprehensive framework for human error analysis within the context of autonomous ships. Firstly, the Hierarchical Task Analysis method is utilized to identify crew collision avoidance tasks associated with the traditional ship, and these tasks are then dissected into different operational stages using the Information Decision Action in a Crew cognitive model. Secondly, a combination of the fault hypothesis method and expert opinions are used to identify potential human error that may occur during collision avoidance operations of remotely controlled ships. Thirdly, an integrated approach is proposed to build a quantitative risk assessment model, which combines Failure Mode and Effects Analysis, Evidential Reasoning, and Belief rules-based Bayesian Network. Then, axiomatic analysis is used to verify the robustness and applicability of the risk assessment model. Finally, based on the results of quantitative risk assessment, specific measures are proposed for enhancing the safety of collision avoidance process of remotely controlled ships. The findings show that uncoordinated interactions of human-computer systems during the decision-making stage are a pivotal factor in the collision avoidance process. Therefore, future design efforts for remote-control centre should prioritize improving the clarity of human-computer interaction interfaces.
1 Introduction
1.1 Background
With the advent of the Industry 4.0 era, many industries and sectors are aiming at the goal of autonomous driving (Jovanović et al., 2024; Li et al., 2023). The development of technologies such as Data Analysis, Pattern Recognition, Artificial Intelligence, Internet of Things, Global Navigation Satellite System, etc., further promotes a more efficient and energy-saving smart shipping industry, which offers unlimited possibilities to realise the goal of fully autonomous ships (Guo et al., 2024c; Liu et al., 2024). In this context, the development of Maritime Autonomous Surface Ships (MASS) becomes an inevitable trend in the shipping industry, and is expected to usher in a greener and safer era in shipping practices (Guo et al., 2024a).
The application of MASS is likely to be reduced human errors, a pivotal factor in the pursuit of safer and more reliable navigation practices (Kim et al., 2020). Yet, there are questions as to if the addition of autonomy necessarily equates to enhanced safety in navigation and if it signifies the complete elimination of the human element. It has been extensively discussed and analysed in the recently published MASS-related literatures (Tao et al., 2024). Although it is widely acknowledged that the majority of maritime accidents are, to some extent, attributable to human error, the impact of such errors is arguably not tangible (Feng et al., 2024; Zhang et al., 2025).
Furthermore, MASS operate in uncertain environments, encountering challenges such as extreme weather conditions, unexpected obstacles, and equipment failures (Fan et al., 2024b). This demands strong technical skills, sound decision-making, and resilience from operators. Consequently, there is a distinct need for further research in the field of MASS and the assessment of human error (Johansen and Utne, 2024). By conducting a comprehensive evaluation of human error in MASS, root causes can be identified and effective training and intervention strategies can be developed to enhance the safety operation of MASS. Additionally, this study offers theoretical guidance for future manoeuvring system designs, ensuring that the risks associated with human error are effectively mitigated as automation levels rise.
1.2 The ship’s autonomous level
The current classification of the MASS Degree of Autonomy (DoA) is primarily based on the level of ship automation. This means that decision support and autonomous control capabilities are stronger with higher levels of automation. However, upon reviewing the literatures on autonomy level classification standards, it is clear that several national or international organisations (e.g. Lloyd’s Register, Det Norske Veritas, Bureau Veritas, International Maritime Organization) consider MASS to require human-system collaboration for various navigation functions, such as monitoring, authorisation, and approval. From a regulatory standpoint, IMO has adopted the recommendation proposed by the Danish Maritime Authority (DMA) to categorise MASS into four classes. These classes are known as DoA1 to DoA4, representing ships equipped with automated systems and auxiliary decision support (DoA1), remotely controlled ships with crews on board (DoA2), remotely controlled ships without crews on board (DoA3), and fully autonomous ships (DoA4), respectively. Among them, DoA2 and DoA3 MASS have realised remote control, allowing personnel to control and operate the ship from other places.
Both conventional ships and MASS have a certain level of automation and auxiliary decision support systems. The research related to DoA1 MASS can be compared or analogised to a fully functional conventional ship in many aspects. Fully automated ships, such as DOA4 MASS, operate with minimal human involvement during navigation. This decreased dependence on human operators poses significant challenges to existing laws and regulations, which need to be revised. As a result, experts in academia and industry have reservations about the widespread use of such ships in the foreseeable future (Zhou et al., 2020). Therefore, DoA2 and DoA3 MASS, transitioning to a high level of automation, have become the focus of attention and research in the shipping and academic communities. Currently, DoA2 and DoA3 MASS are in the sea trial stage, with the essential difference between the two being the presence or absence of the crew on board. In the foreseeable future, the DoA2 MASS, with the crew still on board, will be the first to enter the public eye.
Compared with conventional ships, the evolving mission scenarios of DoA2 MASS have necessitated a fresh evaluation of the associated risks (Chang et al., 2021). Although the reduction in the number of person at DoA2 MASS may reduce the frequency of errors directly caused by personnel operations, the types of human errors may increase (Utne et al., 2017). For instance, operators distanced from the physical scene are coupled with the absence of direct sensory perception of their surroundings. This absence of sensory input hinders their ability to accurately identify target ships and gather sufficient information about navigational situations, ultimately impeding their capacity to make precise judgments in complex or hazardous situations (Huang and van Gelder, 2020); the division of responsibilities between the operator and the crew is ambiguous, and procedures for transferring control lack clarity, leading to problems such as prolonged decision-making times (Fan et al., 2022).
1.3 MASS risk assessment
MASS has a new and distinctive system involving many theories and technologies, such as sensors, intelligent decision-making, telecommunication and shore-based remote control. Increased automation and the development of emerging technology systems present new risks that cannot be anticipated (Li et al., 2023).
In response to these challenges, researchers have diligently explored various dimensions of MASS safety, such as mixed navigation risks (Wróbel et al., 2017), network factors (Hassani et al., 2017), system reliability and maintenance (Lager and Topp, 2019). Once MASS are in commercial operations, they will coexist with conventional ships for a long time, and the uncertainties and potential risks of its operation process will become more complicated. In complex and changing navigational environments, the interaction between unmanned and manned ships will become increasingly complicated (Wróbel et al., 2017).
Network factors are also an important component of MASS security. Data exchange is the primary risk factor affecting the network security of the MASS system. This dynamic process encompasses the potential for intruders to launch cyber-attacks or transmit false signals, thereby disrupting data exchange channels, such as control systems, inter-system functions, and interfaces on board a ship (Hassani et al., 2017). In principle, anyone with access to a ship’s database system can take control of an autonomous ship and change its navigational tasks to suit their objectives. It is essential to recognize that MASS’ safety is affected not only by the external environment, such as navigational (Guo et al., 2024b) and network environment (Longo et al., 2023), but also by its equipment and systems (Fan et al., 2024b). MASS rely on autonomous systems and associated equipment to ensure the stability of information transmission, and to make judgements and warnings about possible contingencies (Lager and Topp, 2019).
Risks are diverse and dynamically changing. Recent studies conducted by the IMO on MASS Risk and Safety Evaluation (RSE) have indicated that the field is still in its nascent stages of research. Mature models still need to be implemented, and the testing and validation of security aspects need to be improved. For the time being, the identification of navigational hazards of MASS mainly originates from expert knowledge and the experience of navigational officers, or the analysis of traditional ship navigation and simulation data, which lacks the support of real navigational data and makes it difficult to put forward specific navigational technical requirements and risk prevention measures for MASS.
Inspired by previous researchers’ explorations of risks on conventional ships (Liu et al., 2023) and risk discussion during the MASS sea trial (Fan et al., 2024a; Veitch and Andreas Alsos, 2022), there has been a marked increase in the research on MASS safety in recent years. Existing studies attribute the main cause of ship accidents to human errors (Feng et al.; Johansen and Utne, 2024). Despite the continuous development of science and technology, the enhancement of ship automation capability cannot eliminate the influence of human beings on the safety of MASS navigation, and the human factor is still the focus of the research on the risk of MASS (Chae et al., 2020; Man et al., 2018). In view of the above research status and shortcomings, this study takes remotely controlled ships as the research object, identifies the hazards during collision avoidance operations, and evaluates the risk influential factors affecting the safety of the ships to enhance their safety.
2 Literature review
The Annual Report on Maritime Casualties 2021, revealed that 81.1% of maritime casualties were related to human behavioural events (European Maritime Safety Agency, 2022) and human behavioural factors (Aydin et al., 2023), and the main accident resulting in loss of life and injury is a ship collision (Shi et al., 2024). Ship collision avoidance is a widely discussed topic, and although collision avoidance methods have been improving, ship collisions are still a common accident in the maritime sector. Therefore, it is necessary to improve the supporting technology of MASS development, especially the collision avoidance decision-making technology (Burmeister et al., 2014).
2.1 The collision risk research of MASS
Since 2017, the IMO has advocated for the maritime sector to discuss the application of International Regulations for Preventing Collisions at Sea (COLREGs) to MASS. Miyoshi et al. (2022) explained the applicability of COLREGs in the operation of MASS from the perspective of seafarers, and discussed whether the application of MASS would require a change in the existing rules. Bakdi and Vanem (2022) put forward the application barriers and implementation challenges posed by COLREGs to MASS from the perspective of navigational practices, and pointed out that the COLREGs need to be elaborated and revised.
In pursuit of enhancing the research of ship collision risk assessment, Zhou et al. (2020) developed a MASS safety domain model by improving the collision scenarios of traditional ships using full hybrid causal logic. The experimental results demonstrated that the inclusion of MASS can reduce the risk of ship collision, but it did not mean the risk factors would be linearly less and disappeared. Based on an existing collision model, Guo et al. (2021) used Belief rules based Bayesian Network (BBN) to quantify the risk in an autonomous ferry collision scenario to explore how the collision risk had changed. It was concluded that changes occurred in the representation of accident types, and accident rates shifted to varying degrees. Based on the field theory and ship collision scenarios, Qiao et al. (2021) proposed a quantitative risk assessment method, which overcame the shortcomings of traditional risk analyses, and had a large potential for application. Zhang et al. (2021) proposed a novel collision avoidance trajectory search and optimisation algorithm, which can effectively generate free collision avoidance trajectories, realise multi-ship real-time collision avoidance in uncertain environments. Additionally, based on the ship manoeuvring process, combined with the recovery navigation model, Zhang et al. (2022) proposed an adaptive autonomous collision avoidance scheme for MASS, which can make MASS return to its original course after completing the collision avoidance task. Liu et al. (2022b) proposed a fuzzy logic-based multi-model spatial data fusion and accident data mining approach to trajectory risk perception and developed a risk perception system. It can be applied to collision avoidance training for MASS operators.
Existing studies have shown that researchers have developed a variety of control algorithms, and successfully applied simple logic to the collision avoidance process of MASS (Lee et al., 2023). However, given the complexity of the practical operation of ship collision avoidance, the feasibility of collision avoidance methods remains questionable, and the issue of ship collision avoidance is still far from being solved (Wróbel et al., 2022). The challenges are due to the high uncertainty involved due to various influential factors beyond the currently available literature including climate change, emerging technologies and the associated retrofitting of ships, and regulatory adaptation to such changes. Therefore, adopting scientific and reasonable methods to improve the collision avoidance capability of MASS is a primary objective.
2.2 The human errors research of MASS
The existing studies pointed that a fully autonomous level of ship is unlikely to be realised at this stage, with onboard crew (OCs) and remote operators (ROs) still playing an important role in MASS navigation (Man et al., 2018). While MASS is expected to reduce the number of ship collisions attributed to human error, it is essential to acknowledge that human error remains an inherent factor (Utne et al., 2017; Wróbel et al., 2017). Given MASS’ unique nature, human error’s impact on potential ship accidents remains uncertain.
Some studies have underscored the significance of human errors concerning the safety of MASS; it is worth noting that they have primarily focused on qualitative analyses rather than quantitative assessments. Ahvenjärvi (2016) discussed human errors related to MASS development, and mentioned that the lack of ability to adapt to unexpected situations is a potential weakness of MASS operators. Abilio Ramos et al. (2019) assessed the likelihood of operator error during MASS navigation, analysed interactions between ROs and personnel on board. The study showed that although MASS can disengage a degree of personnel from ship operations, it still relies on personnel for supervision and remote manoeuvring. Wróbel et al. (2021) developed a Human Factors Analysis and Classification System-Maritime Accidents (HFACS–MA) Framework to analyse the human errors of MASS in remote control mode. The study showed that the operator’s behaviour is a key factor affecting the safety of MASS, which prevented the eventual occurrence of accidents.
Regarding specific events, some researchers have focussed on Human Computer Interaction (HCI) failures and have combined several methods to assess the human error of MASS. Zhang et al. (2020) proposed an error probability model for ROs, emphasising human-machine coordination, and they quantified the human errors in the emergency response process of DoA3 MASS using human error rate prediction (THERP) and Bayesian network (BN) methods. This work offered a flexible reference for theoretical remote-control centre construction and operator training. Moreover, by monitoring the process of MASS operators interacting with the system, Liu et al. (2022a) quantitatively analysed operational errors in human–machine interfaces (HMIs) using the Success Likelihood Index Method (SLIM). The results showed that poor personnel conditions could easily induce operational errors.
The above studies have shown that human capabilities such as fitness for duty, experience and communication are still important factors affecting the safety of MASS in remote control mode. However, the existing literature does not sufficiently investigate how operators interact with the system when encountering possible failure or emergency scenarios. In particular, in the DoA2 MASS collision avoidance context, human error modelling and interaction analysis must be based on crew, operator and system. Therefore, when developing a MASS risk assessment tool, it is important to consider the potential errors in the operation of the crew on board and ROs.
2.3 Research gaps and contributions
The review of MASS literatures has revealed some areas for improvement in the current research. Many researchers are committed to analysing MASS collision risk but have only given a framework for collision risk analysis and have yet to pay in-depth attention to human errors. A preponderance of the existing studies has placed a primary focus on refining collision avoidance techniques, developing collision risk detection methods, and exploring collision avoidance rule applicability, focusing on providing conflict detection and collision avoidance decisions. However, they do not consider the time-dependent and avoidable characteristics of collisions, nor the inevitable link between accidents and human behaviour in the operation of MASS.
Unlike previous studies, this study selects DoA2 MASS as the research object, and identifies human errors in the collision avoidance process by using a comprehensive hazard identification methods. Focusing on personnel operations during collision avoidance process, human errors leading to ship collisions are identified from the crew on board and ROs’ perspective, respectively. Then, a new risk assessment framework is developed to quantify human error during the emergency response of collision avoidance process, and targeted risk prevention and control measures are proposed to reduce the probability of human error and the frequency of collision accidents. This study can be distilled into several key contributions, which include:
1. An innovative combination of ship collision avoidance operations and an HTA framework is used to identify the sequence tasks of ship collision accidents, determine the actions or measures taken by the crew on board and ROs to avoid collision, and identify the human errors during the emergency response process.
2. Based on the cognitive behavioural analysis of the dynamic response process of the collision avoidance operation actions of the crew on board and ROs, a fault hypothesis method is used to analyse the operational differences between MASS and conventional ships, and then establish a human error analysis framework applicable to the identification of the collision risk of DoA2 MASS.
3. A risk assessment model integrating Failure Mode Effect Analysis (FMEA), Belief Bayesian Network (BBN), Evidential Reasoning (ER) and utility function methods is proposed to account for the uncertainty of expert knowledge, and then sensitivity analyses are used to verify the applicability and robustness of the risk assessment model.
3 Materials and method
3.1 The human errors identification of DoA2 MASS collision avoidance process
While the roles of personnel may vary across different autonomy levels of MASS, their overarching objective of ensuring ship safety remains consistent. Valuable insights from research on human errors in conventional ships, can serve as a foundation for understanding and addressing RO errors in MASS.
This study draws on human error studies of traditional ships, and affirms the importance of cognitive functions in ensuring ship safety. Firstly, ship collision accident reports and HTA are used to derive the possible failures of the crew, and generalise nine human tasks during collision avoidance on traditional ships. Secondly, the nine main tasks are classified based on the Information Decision Action in a Crew (IDAC) cognitive model and then migrated into DoA2 MASS through failure hypothesis analysis. Finally, the human errors in the collision avoidance process of DoA2 MASS are identified following expert panel discussions. Figure 1 illustrates the technical flow.
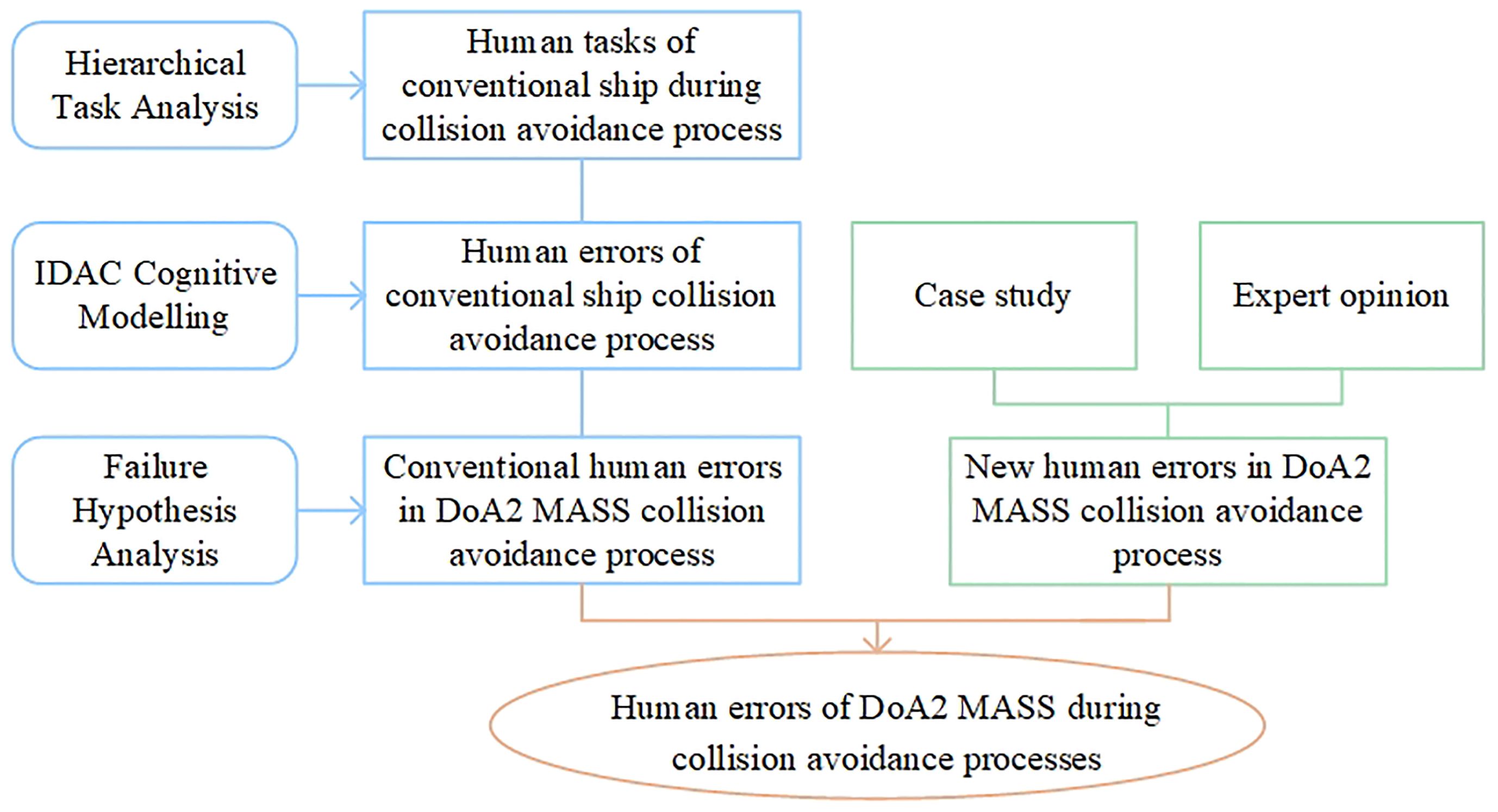
Figure 1. The human errors identification process of DoA2 MASS.
As a top-down task analysis method, HTA can reproduce the progression of tasks from top to bottom, helping researchers start from the highest level of the task and understand the details of the task and the execution process step by step. In the IDAC, a hierarchical structure is used to solve complex system issues. This can be seen as a causal model covering the various dynamic response stages of personnel, i.e., information acquisition, decision-making and action among members. The process is repeated until the task is associated with only one stage of the cognitive model IDAC.
3.1.1 Collision avoidance tasks for conventional ships
In this study, accident reports involving ship collisions are selected from China Maritime Safety Administration (China MSA), and the pre-accident collision avoidance tasks are extracted using HTA. Establishing the correspondence between collision avoidance tasks and operator behaviours through deductive reasoning helps researchers understand the cognitive and decision-making processes involved, and obtain the behavioural information that operators need to perform the collision avoidance task (Mandal et al., 2015).
During a ship’s voyage, the crew consistently detects and evaluates the ship’s navigational position. Objective evaluations are necessary at all times. If a ship poses a collision risk, the topside task opens, and the crew must act to prevent the collision. The collision avoidance actions taken by the crew depend on several variables, including but not limited to, the type of ship, the number of ships, and the type of encounter. Ship collision accident reports demonstrate that crew members have full knowledge of the ship’s condition and complete all or some of the following tasks, which are important for early detection and prevention of accidents: Monitor ship traffic situation during the navigation; Identify potential routes and conditions of target ships; Indicate distances and routes through audible warnings; Predict the likelihood of collision risk; Decide whether to take action; Communicate with the target ship to understand its intentions; Develop an appropriate collision avoidance plan; Execute it properly; Monitor the subsequent status of the ship.
To be sure, the crew should conduct condition evaluations beforehand to ascertain operational procedures and adverse conditions that may impact safety, this will give them ample time to create evasive strategies based on the current situation.
3.1.2 IDAC cognitive modelling
The tasks that crews need to perform to avoid collisions are divided into three distinct parts by type: information acquisition, decision-making, and action. This classification helps in understanding the sequential flow of tasks from gathering information, to making decisions based on that information, and finally executing actions based on those decisions. Information acquisition is the process of processing incoming information by the crew. This process encompasses information comprehension, correlation, and prioritisation. Decision-making considers all the acquired information as a whole and performs situation assessment and diagnosis. The action stage focuses on accomplishing the actions developed in the decision-making stage. These actions are based on the crew’s skills and do not require much mental involvement.
This study utilises the IDAC model to categorize the tasks identified in Section 3.1.1 into three distinct categories: perception tasks, decision-making tasks, and execution tasks. To classify human errors, personnel actions are linked to tasks and then segmented according to corresponding stages:
1. During the information gathering process, there may be inaccuracies or failures in data collection (Stage I).
2. Personnel have accurate and comprehensive information. However, there may be an inaccurately evaluated situation regarding the ship or an inadequate solution to the problem (Stage D).
3. Personnel have accurate and comprehensive information and make sound decisions, but errors occur during the implementation process (Stage A).
Based on the IDAC model and considering the actual collision avoidance operation process of the ship, the categorization of human error in this study is limited to three stages of the cognitive action model. There are no further distinguishment between skill-based, rule-based, or knowledge-based error types.
3.1.3 Fault hypothesis
Although MASS are still in the developmental and trial operation stage, conducting risk prevention and control research is of great necessity. There is a lack of research in the existing literature analysing the risks associated with MASS in emergencies, particularly when personnel are manoeuvring the ship in different positions. To address this gap, based on the 9 main tasks of the traditional ship collision avoidance process extracted in Section 3.1.1, the task appropriate for DoA2 MASS is formulated by applying a Failure Hypothesis Analysis method. It is evaluated whether these task activities will still be present during the MASS collision avoidance process, and if their failures will inevitably result in an accident.
To review the matter, 10 experts in the field were invited for brainstorming. They include senior researchers specialising in ship safety, shipmasters, and ship navigators with practical experience, details of the experts are shown in Table 1. Drawing upon their extensive knowledge and experience, these experts thoroughly discussed the human errors that can occur during collision avoidance about the 9 tasks outlined in Section 3.1.1.
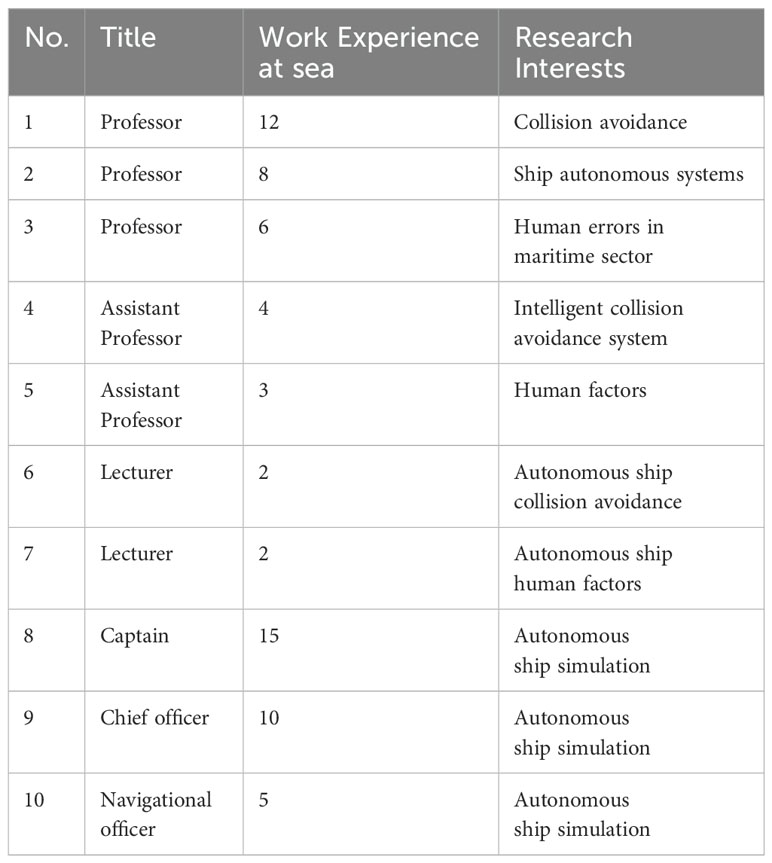
Table 1. The basic information of the invited experts.
Compared to traditional ships, DoA2 MASS has a higher level of autonomy. The use of situational awareness and autonomous navigation systems enables personnel to avoid repetitive and meaningless tasks (van de Merwe et al., 2024). However, collision avoidance events inherently follow a consistent time series, and the pattern of human influence on safety remains largely consistent. As can be seen in the collision avoidance process of traditional ships, human behaviour presents a complex factor that necessitates consideration in the emergency response for MASS. Although MASS typically only require fewer crew on board, and the system performs collision avoidance tasks under the operator’s supervision, there will still be occasions where personnel must take control and intervene the operational system. When there is an emergency that requires real-time monitoring and response tasks, the system alone or in conjunction with personnel will be responsible for these tasks. During this process, ROs will be an important part of ensuring navigational safety.
Therefore, the tasks listed in Section 3.1.1 still exist in the MASS collision avoidance process, with only a change in the location where these tasks are carried out. The tasks initially executed by the crew will now be undertaken by the ROs, transferring human errors from the ship to ROC. Operator’s behaviour covers multiple tasks such as remote monitoring and manual control, which still significantly impact hazardous events (Rodseth and Tjora, 2015).
3.1.4 Case study
Despite the inclusion of autonomous systems, MASS sailing states are still set by people to a certain extent, essentially a transition from human to computer control. Human-computer interaction is crucial during the early operational stages of MASS (Song et al., 2024). Therefore, in mixed navigational scenarios, some new types of risks arise in addition to the traditional collision risks. For example, the frequent change of operating modes requires operators to have good professional skills and to improve their ability to cope with the risks.
This section aims to identify the expected personnel behaviours associated with MASS collisions and discuss the importance of these behaviours for safety in highly autonomous situations. The importance of risk modelling can be seen in the extensive risk assessment literatures (Thieme et al., 2018). Therefore, based on Sections 3.1.2 and 3.1.3, the tasks that personnel need to perform during collision avoidance are derived and the behaviours are modelled. The ship collision accidents are analysed using HTA to refine the collision avoidance tasks of personnel, and then the task stages and associated human errors are delineated (Chang and Mosleh, 2007). The collision scenario starts with detecting the target ship by the own ship, in conjunction with the accident report and expert opinion, and the sequence of tasks performed by the system, operator and crew is shown in Figure 2. When the system believes that there is a target ship, it triggers the ROC’s alarm using audible and/or visual alarms (Martins and Maturana, 2013). The operator must respond to the alarm and, if the situation is too complex, hand over control to the crew on board. Simultaneously, the ROs can also detect the target ship before the system does and respond before an alarm is received. However, in scenarios where operators supervise multiple ships simultaneously, they often rely on the results detected and plans formulated by the autonomous system. This allows them to efficiently distribute their attention across various monitoring tasks (Pedersen et al., 2020).
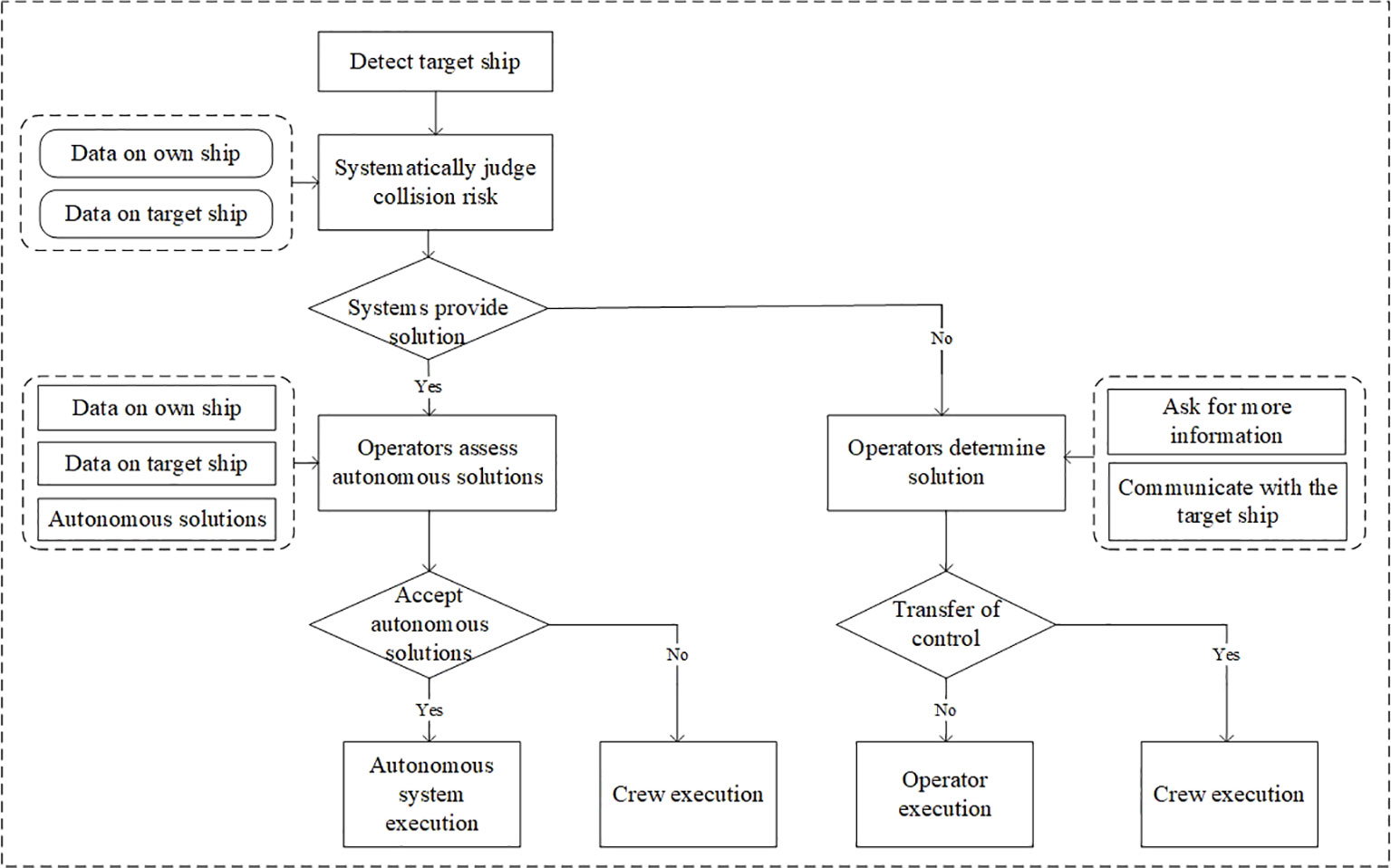
Figure 2. Sequence of tasks performed by the personnel during collision avoidance.
Beyond the sequence of tasks, it is crucial to examine how personnel interact with the system and analyse the repercussions of interaction failure. Figure 3 illustrates four potential forms of HCI:
● Interaction Form 1: The system detects the target and successfully alerts the operator, but the operator does not adopt the solution.
● Interaction Form 2: The target ship is successfully detected and alarmed, but the system does not provide an autonomous solution.
● Interaction Form 3: The system fails to detect or detects successfully, but the alarm fails, the operator starts to take over the monitor and intervention tasks.
● Interaction Form 4: The operator takes over and assesses complex situations, requiring control transfer to the crew on board.
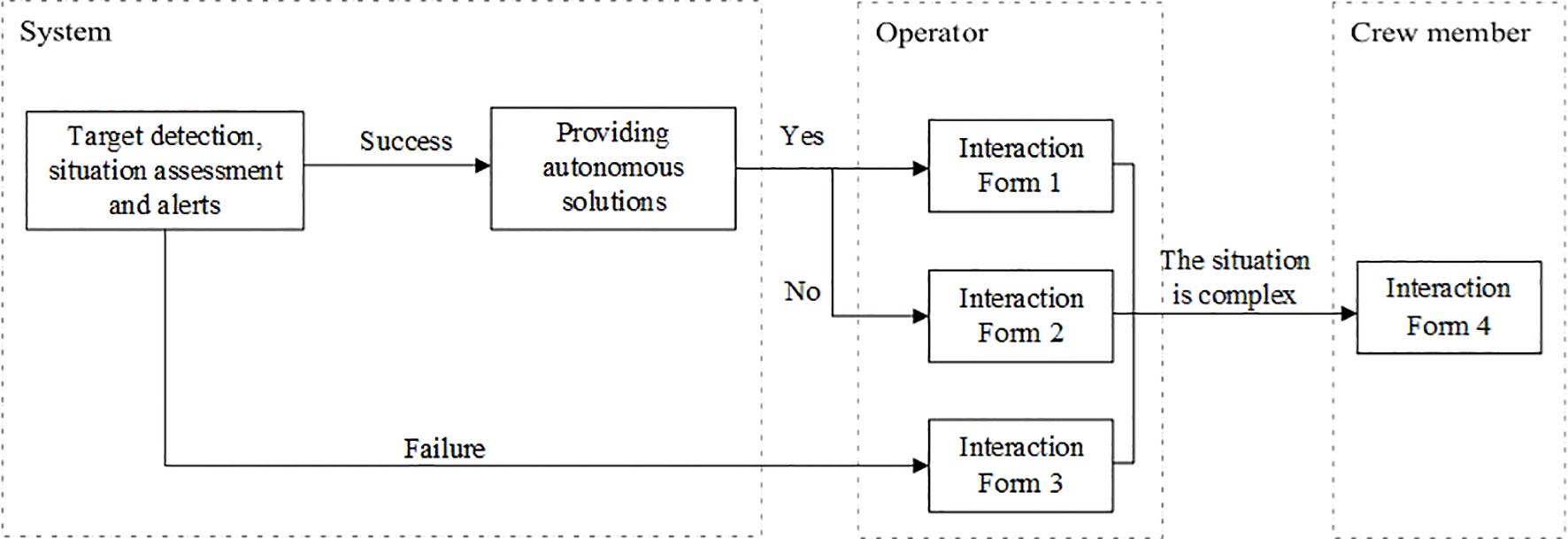
Figure 3. Four forms of interaction in a collision scenario.
By analysing the collision avoidance tasks and the forms of interaction, personnel behaviours are classified into three categories: perception behaviours, decision-making behaviours and execution behaviours.
1. Perception behaviour: Operators employ equipment such as Radar or AIS to monitor the ship’s real-time situation during navigation, including detecting target ships, assessing their distance, heading, and speed, and identifying potential collision risks with ships on or near own ship’s route.
2. Decision-making behaviours: Upon detecting a target ship, operators assess the collision risk based on the current situation and then act in compliance with COLREGs and local waterway regulations. Operators may communicate with the target ship to ascertain their intentions and then determine the ship’s next course of action.
3. Execution behaviours: Operators execute the manoeuvre tasks determined during the decision-making stage by regulations. They continuously monitoring and observing the situation until the ship is no longer at risk of collision.
By analysing specific scenarios, the behaviours that crew need to perform during information acquisition, situation assessment, and action are identified. Subsequently, identify human errors that precede accidents, including errors related to personal skills, organizational communication, and situational awareness. The human error model of DoA2 MASS, based on IDAC-HTA, is illustrated in Figure 4.
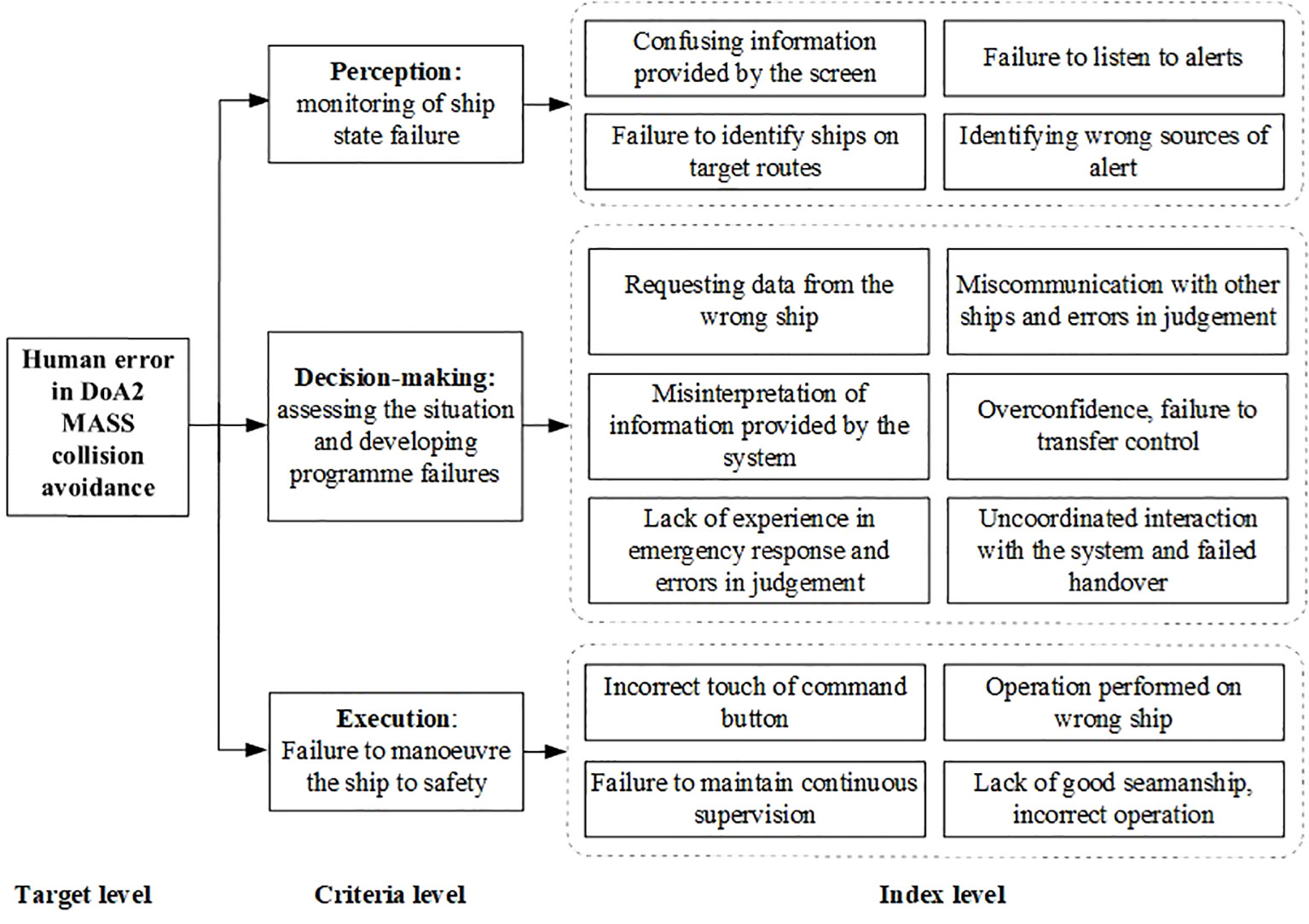
Figure 4. The human error model of DoA2 MASS based on IDAC-HTA.
The human error model of DoA2 MASS consists of three levels. The top-level constitutes the primary focus of the study, referred to as the target level. The second level is divided into three stages: perception, decision-making, and execution. It outlines the critical stages of the evaluation process, as the criteria level. The third level corresponds to the criteria level, and combines different tasks and accident causation chains to capture personnel error behaviours, as the index level.
3.2 Risk assessment method
For a systematic and comprehensive analysis of human errors in the collision avoidance process of DoA2 MASS, this study develops a risk index hierarchy system based on the IDAC-HTA model. To assess the risk indexes in this system, considering that the current risk analysis of MASS requires expert knowledge to compensate for the lack of objective data, FMEA, BBN, and ER algorithms are combined to develop a risk assessment model. The quantification and ranking process are visually depicted in Figure 5.
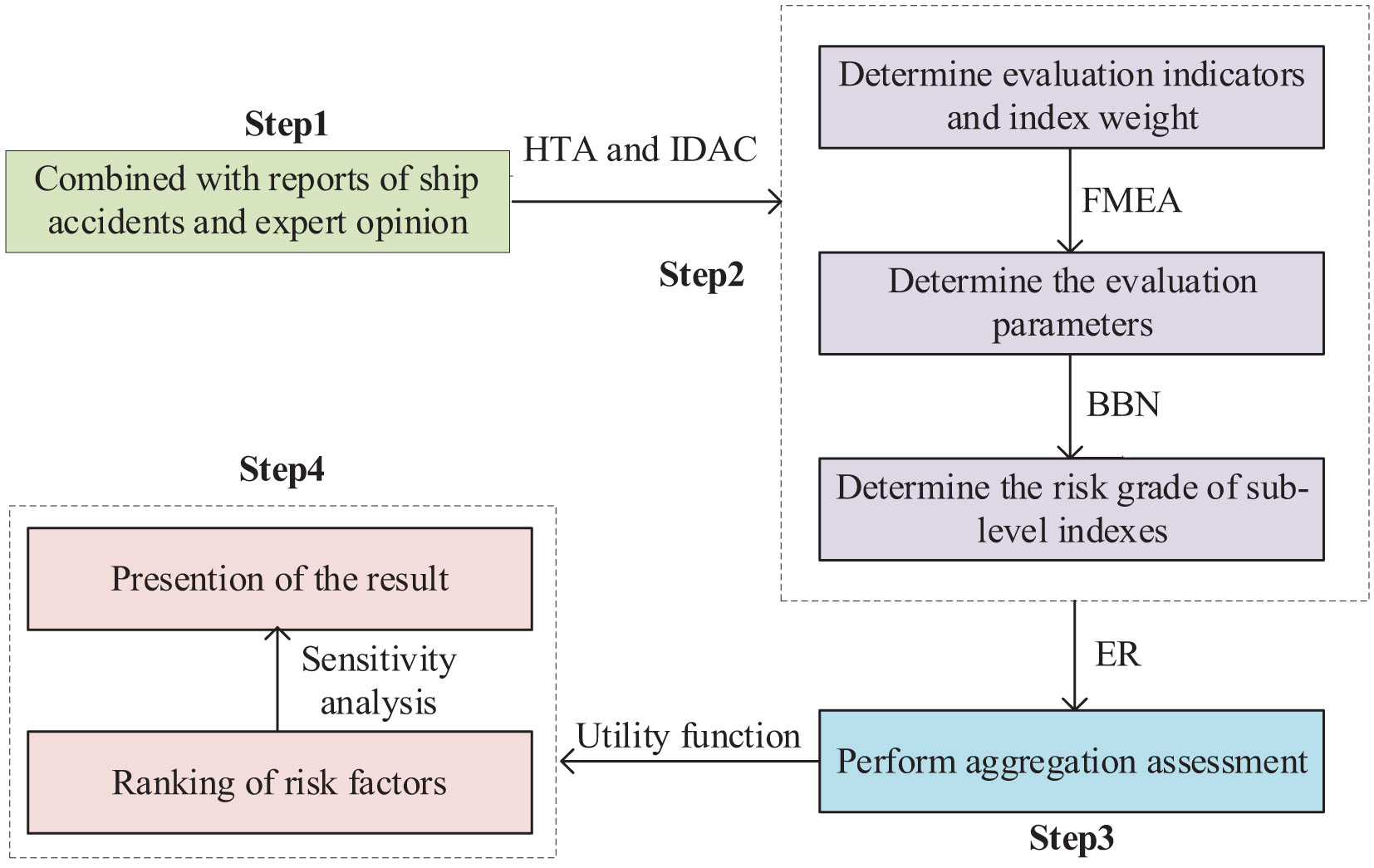
Figure 5. Risk assessment process for human errors in DoA2 MASS collision avoidance.
3.2.1 FMEA
FMEA finds extensive application in various industries, from automotive and aerospace to business management (Xia et al., 2023). This general assessment method is widely used to investigate how a single element affects the failure of an entire system or process (Chang et al., 2021). FMEA offers a comprehensive list of known and potential initialisation errors, to delve into the root causes of failures. From there, mitigation measures are proposed that eliminate or reduce the likelihood of high-risk incidents. This study uses FMEA to analyse the tasks taken by personnel in DoA2 MASS collision avoidance process and investigate the risk probability of collision due to human error. The traditional FMEA method has three basic attributes in calculating the Risk Action Priority (RAP) for each failure mode: the frequency of occurrence of the failure mode (Occurrence, O), the severity of the impact (Severity, S), and the probability that the failure cannot be detected (Detection, D), and the RAP is defined as in Equation 1.
The FMEA method has gained widespread adoption in human error analysis due to its straightforward use and effectiveness (Wan et al., 2019). However, it has also been subjected to many criticisms, particularly in the use of the RAP concept (Liu et al., 2011; Yang et al., 2008). The distinction between the different levels is low; the concepts are vaguely defined and lack a solid scientific foundation. For example, in Equation 1, although the hidden meanings of the risk parameters may be completely different, different combinations of the three parameters may produce precisely the same RAP value. Besides, when a single risk can lead to multiple potential failure modes, developing relevant mitigation measures should be prioritized. However, the mathematical formulation of RAP is based on a risk perspective only (Wang et al., 2023). The calculation process does not consider the relative importance of O, S and D.
To overcome these inherent shortcomings, this study combines ER with BBN to improve the performance of FMEA. This combined methodology offers a robust solution to the complexity and uncertainty of risk parameters, especially in MASS where limited empirical data is available. Furthermore, the IDAC-HTA model is qualitative in nature, and it relies on expert knowledge to assist in the judgment and quantification of linguistic variables. In this study, five linguistic levels are used to assess these indexes. Table 2 provides the linguistic descriptions associated with each parameter, namely O, S, D, and P, with P as an output indicating the risk status of the sub-index.
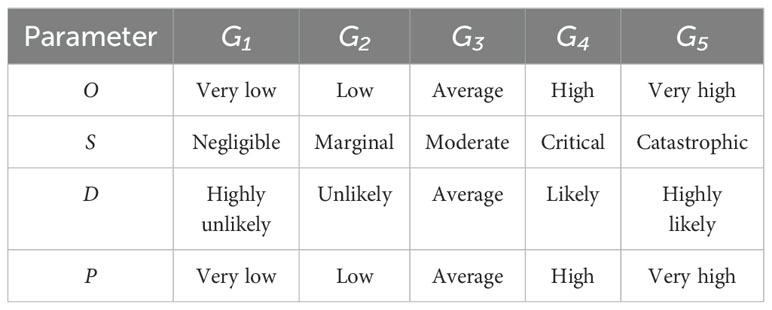
Table 2. Linguistic scale for parameters O, S, D and P.
3.2.2 FMEA-based Bayesian networks
The shipping industry widely uses the BN as a risk analysis tool (Aydin et al., 2024). Yang et al. (2008) proposed a BN approach based on a fuzzy rule base that fully utilises Bayesian representation and reasoning for uncertain knowledge. The risk assessment information described by experts in natural language is transformed into deterministic values, compensating for the shortcomings of FMEA, such as the inability to reflect the failure correlation of failure causes. The yth IF-THEN rule in the traditional fuzzy rule base is shown in Equation 2.
where is the rule under the condition y; and denotes the reference value of the ith premise attribute, and after the traditional fuzzy rule output, the result of the yth rule is . However, the characteristic of a single output of a traditional fuzzy rule system leads to the fact that cannot reflect the small changes of semantic variables in .
Hence, some researchers have introduced the notion of confidence in response to this challenge. They have put forward a novel knowledge representation approach based on rules, where all possible outcomes are linked to a confidence level (Wang et al., 2023). This innovation bolsters its capacity to grapple with uncertainty within complex systems. Based on this, the rules in Equation 2 are extended into confidence rules, as shown in Equation 3.
In the new rule knowledge representation, indicates that is considered as the confidence distribution of all possible outcomes.
When using Bayesian networks for risk inference, expressing these rules in the form of conditional probabilities is imperative. This transformation allows the incorporation of these confidence rules into the broader framework of confidence levels. For example, the yth rule in Equation 3 can be expressed as “the probability that the different assessment levels of risk state are included in all possible outcomes of , if the premise attributes of a factor satisfy Equation 2”, as shown in Equation 4.
Among all possible outcomes, M denotes the number of individuals and "" denotes the conditional probability of different individuals.
Bayesian modelling can simplify the complex risk inference process by transforming the confidence rule base into a network graph with N child nodes and one parent node. The risk status of a risk factor can be derived by first taking the assessment information of the risk parameter as the prior probability of each child node and then deriving the marginal probability based on Equation 5.
where denote the premise attributes in the confidence rule base, indicate the number of reference values associated with each premise attribute. denotes the probability that the premise attribute A in the confidence rule base takes the ith reference value and is the probability that the risk state P takes the mth reference value.
3.2.3 Evidential reasoning algorithms
ER is a multi-criteria decision analysis method that is used to aggregate uncertain subjective data (Yang and Wang, 2015). ER algorithms are widely used to handle uncertainty and quantify complex systems’ integrity, which makes the results more accurate (Jian-Bo and Dong-Ling, 2002; Wan et al., 2019). In the ER-based risk assessment process, firstly, the factors at each level of the IDAC-HTA model are compared two by two with the help of expert judgement, and the degree of mutual influence of the index levels is analysed using AHP. Then, based on the analysis in Section 3.2.2 to obtain the expert’s evaluation of the confidence level of the risk status, the ER method is used to aggregate the factors of the index levels to obtain the confidence level of the risk factors in the three stages.
To obtain the confidence level of each index with respect to the evaluation level, evaluation levels and confidence functions have to be established. It is assumed that there are Q indexes associated with the criterion . Equation 6 and Equation 7 give the set of indexes and the normalised weights, respectively.
Taking the perception stage as an example, its weight is denoted by and ; is the weight of the 3rd sub-factor (Information provided by the confusion screen) under the perception stage and . The rest of the stages and factors are analogous.
Assuming that denotes the confidence level of the stage for evaluation level , where , are the evaluations of the available options under that stage, this assessment can be expressed by Equation 8. When the sum of the confidence levels is 1, then the evaluation of that stage is complete, i.e., .
where is the quality of the probability that stage is assessed as . It represents the extent to which a subfactor supports the assumption that the stage to which it belongs is a grade , and can be expressed as Equation 9. For sub-factors, Equation 9 can be rewritten as Equation 10. Then, is defined as the set of sub-factors under criterion , as shown in Equation 11.
where is defined as the probability that all subfactors in support the stage being assessed as a grade . is the residual probability that is considered unevaluable after the evaluation of . and can be generated by combining the underlying probabilities and for all . Thus, the evidential reasoning algorithm can be represented by Equations 12 to 15.
where is a normalisation factor that , aggregates the evaluation portfolio confidence of the stage. It is important to note that for all , the probability of evaluating at different levels is not correlated with the order in which the subfactors are aggregated. In other words, the results will not change if they are aggregated in a different order.
3.2.4 The ranking of risk value
In order to accurately rank all risk factors, it becomes essential to aggregate the confidence levels of the factors and introduce the RAP, as shown in Equation 16, where represents the result of the confidence level being assigned to . Obviously, the higher the RAP value of a factor represents, the higher its combined risk level. Meanwhile, it also means that the factor is more likely to lead to collisions in DoA2 MASS.
Regarding the utility function involved in Equation 17, , , , , .
3.2.5 Verification
When a new model is developed, it needs to be carefully tested for reliability. The BBN model can use changes in RAP values as a judgement criterion, aiming to assess the model’s sensitivity in output (i.e., RAP values of risk factors) to minor adjustments in input (i.e., the assessment of risk parameters). Provided that the established confidence rule base is dependable and the Bayesian inference process is rational, the analysis results should meet a minimum of three axioms (Chang et al., 2021; Yu et al., 2021).
Axiom 1: When adjusting the initial probability of any risk factor, the final probability of the parent/target node will inevitably respond correspondingly, either increasing or decreasing.
Axiom 2: If changes in the subjective probability distribution of a given risk factor are considered, the impact on the parent/target node value should accurately reflect the weight assigned to that particular factor.
Axiom 3: The influence of modifying the assessment level of a risk factor (indicated by u pieces of evidence) on the RAP value of its associated stage, always outweighs the effect of altering any arbitrary subset within that combination (v pieces of sub-evidence, v ∈ u).
Building upon the validation principles discussed above, a sensitivity analysis is conducted for the aggregation process using the ER algorithm. If the data aggregation process is both sound and practical, the results of the sensitivity analysis should conform to at least two basic axioms (Cui et al., 2023):
Axiom 1: An upward or downward adjustment in the confidence level associated with the state of risk factor in the system will inevitably lead to an increase or decrease in the RAP value of the risk for the corresponding risk stage.
Axiom 2: A combination of changes in the confidence of risk factors in the system will always have a more significant effect on the RAP value of the corresponding risk stage than changes in any subset of that combination.
4 Calculation and ranking of risk factors
4.1 Calculation of the value at risk for the sub-indexes
The assessment is performed in this stage (e.g. S1: perception, S2: decision-making and S3: execution) using five hierarchical rating scales. Each risk factor consists of parameters O, S and D, i.e., the risk factor’s antecedent attributes. For example, an expert might assess the frequency of “S11: Confusing information provided by the screen” as “Very high, 0.0%; High, 38.0%; Average, 40.0%; Low, 20.0%; Very low, 2.0%”, the severity of consequence as “Catastrophic, 0.0%; Critical, 0.0%; Moderate, 42.0%; Marginal, 46.0%; Negligible, 12.0%”, and the probability of failure not being detected as “Highly likely, 2.0%; Likely, 34.0%; Average, 46.0%; Unlikely, 18.0%; Highly unlikely, 0.0%”. Based on this, the evaluation values of all risk factors are obtained. The evaluation results are shown in Figure 6, where O1, O2…… O5 are the level of frequency, i.e. very high, high, average, low and very low respectively.
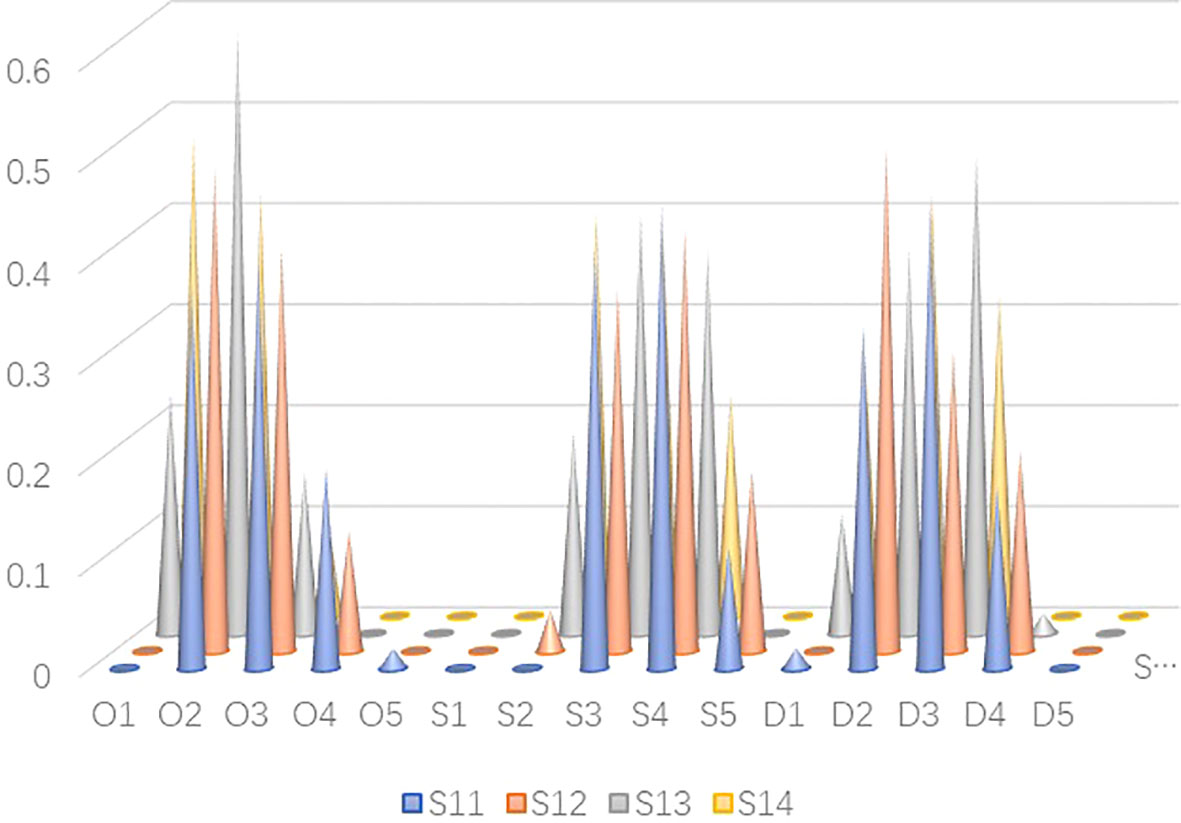
Figure 6. Distribution of the brief degree of risk parameters of in S1 stage.
According to the rules formulated in Equations 2 and 3, a belief structure is established to convert the expert’s confidence in a specific risk factor. Then, the risk state of the sub-factors in the perception stage is calculated using Equation 5. Taking the factor “ S11: Confusing information provided by the screen” in Figure 6 as an example, the inference process of the risk state can be implemented through Bayesian modelling software, as shown in Figure 7. Similarly, the risk states of the four sub-factors in Figure 6 can be computed, as demonstrated in Table 3.
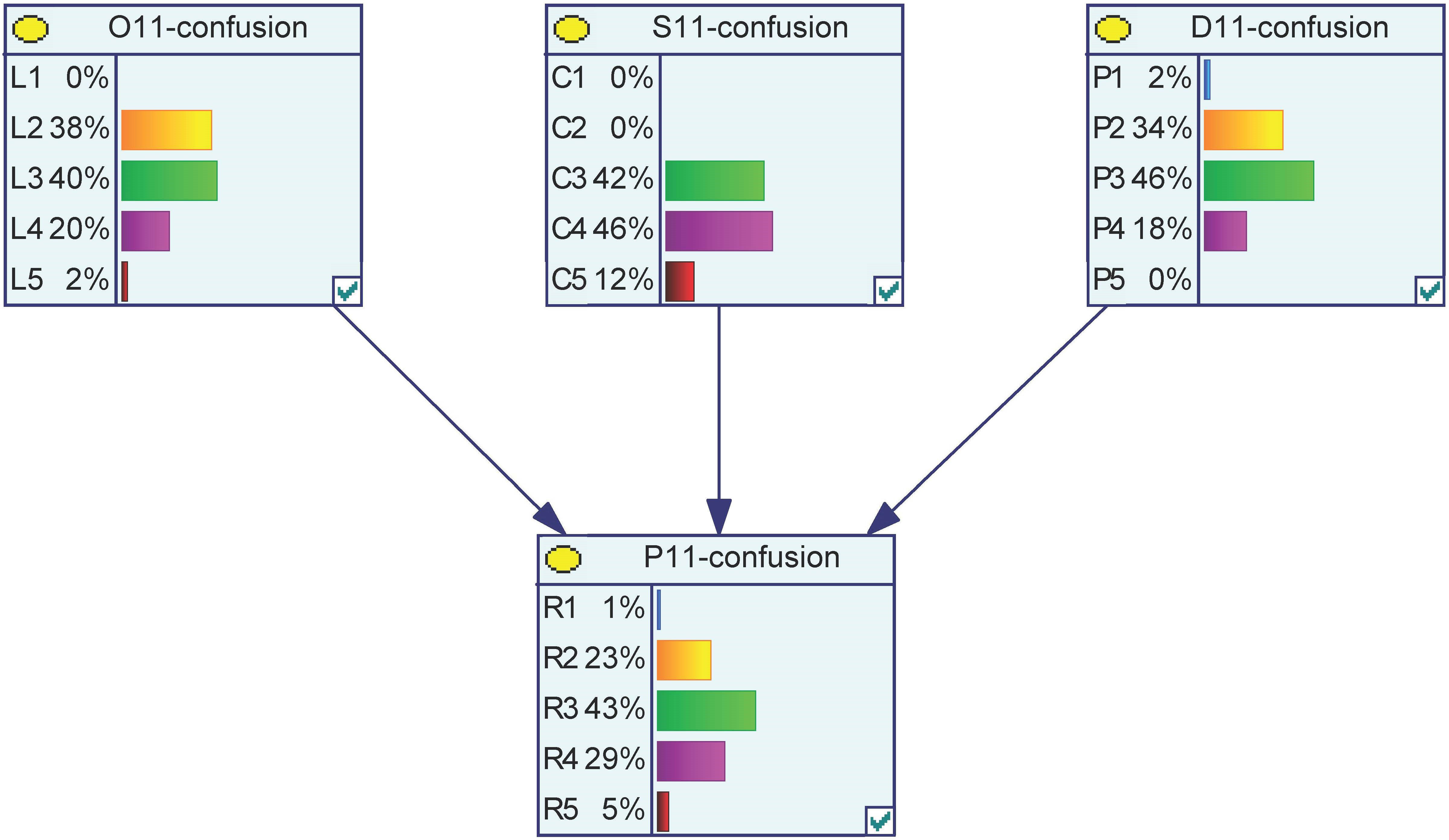
Figure 7. Risk inference process for “S11: Confusing information provided by the screen”.

Table 3. Distribution of the brief degree of risk values in S1 stage.
4.2 Calculation of evaluation index weights
A questionnaire survey of domain experts was conducted to obtain a pairwise comparison matrix for each factor. Then, the weights of the factors in the assessment model were derived and tested for consistency. Based on the equivalent working background and judgment of expert, the relative weight values are uniformly distributed in the normalization process. After subjecting all stages and factors to a similar process, the distribution of weights of each factor at different stages is shown in Table 4.
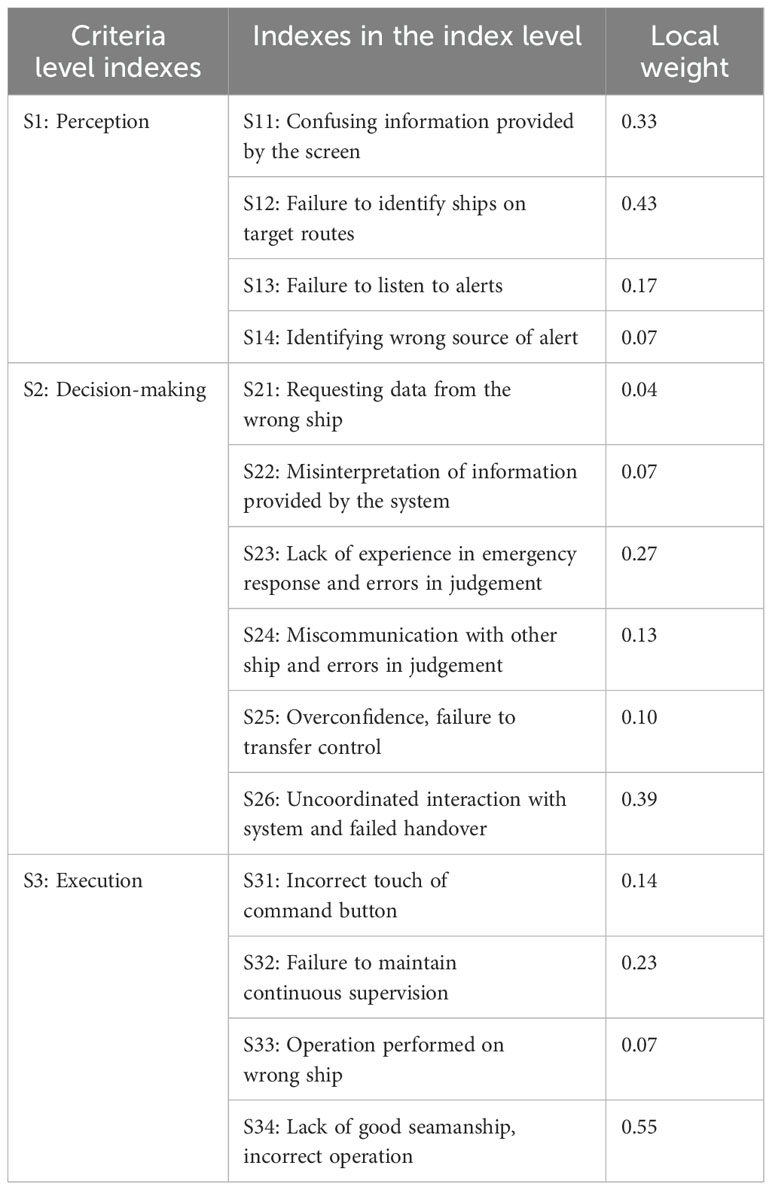
Table 4. Weights of each index of the assessment model in different stages.
4.3 Integrated assessment based on ER algorithm
Once the risk status of the sub-factors and the factor weights are secured, the aggregation of risk status across three stages is performed through the ER algorithm, as outlined in Equations 6-15. To illustrate this, the data provided in Table 3 is used to calculate the risk status value for the S1 stage. The reasoning process can be achieved and the results are shown in Figure 8. Similarly, the risk status value for stage S2 is (0.0029, 0.1510, 0.4395, 0.3083, 0.0983) and the risk status result for stage S3 is (0.0272, 0.3149, 0.4008, 0.2571, 0).
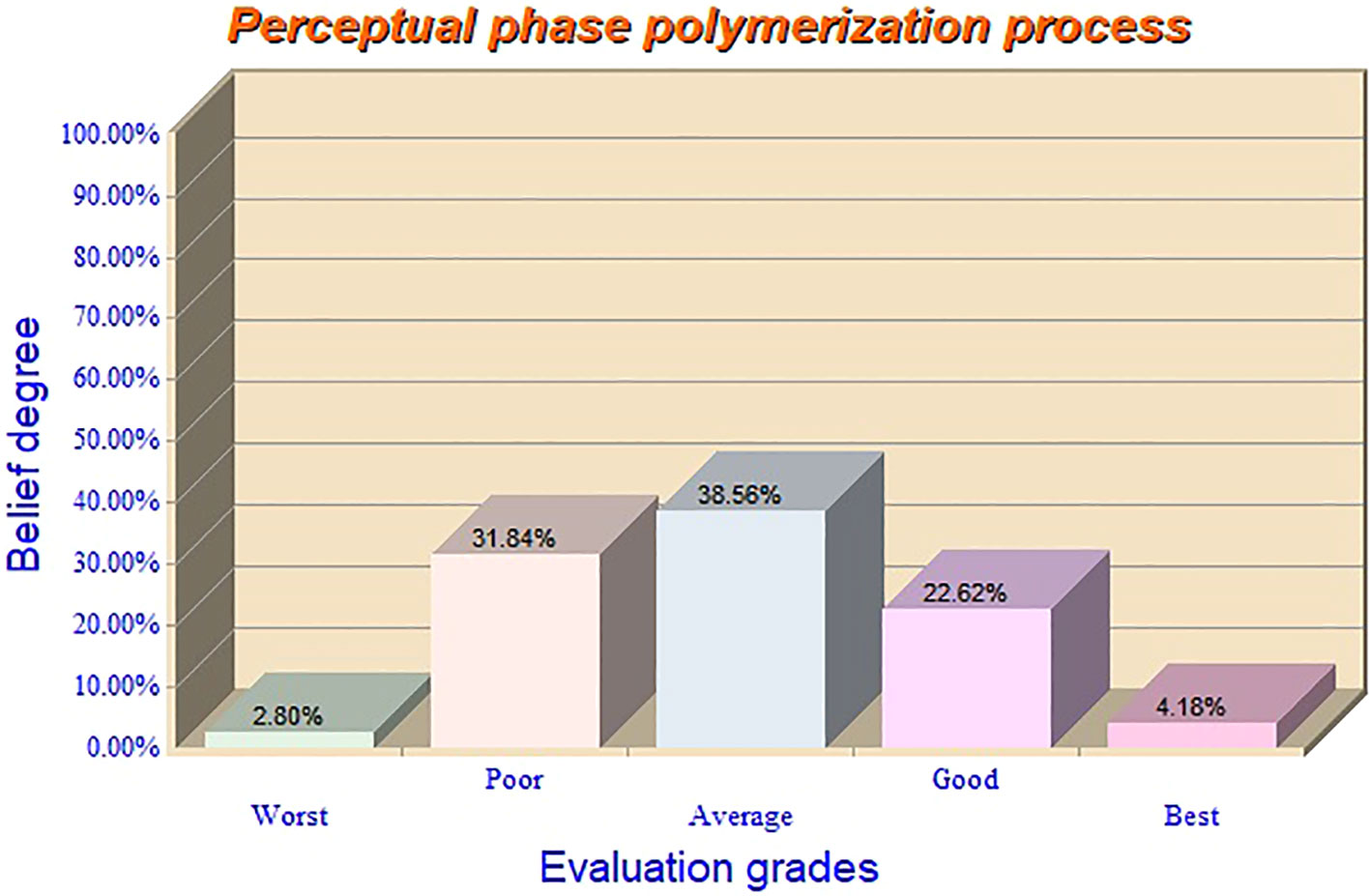
Figure 8. Perception stage S1 risk aggregation process.
4.4 Calculation and analysis of utility values
To compare the magnitude of risk for factors and stages, utility functions are used to convert the confidence distribution of risk states into clear numerical values. Taking the “S11: Confusing information provided by the screen” in the perception stage as an example, the utility value of risk can be calculated through the confidence level data in Table 3, using Equations 16 and 17, as shown below.
In this way, risk-utility values can be calculated for all factors and stages, and the results of the risk ranking are summarised in Table 5.
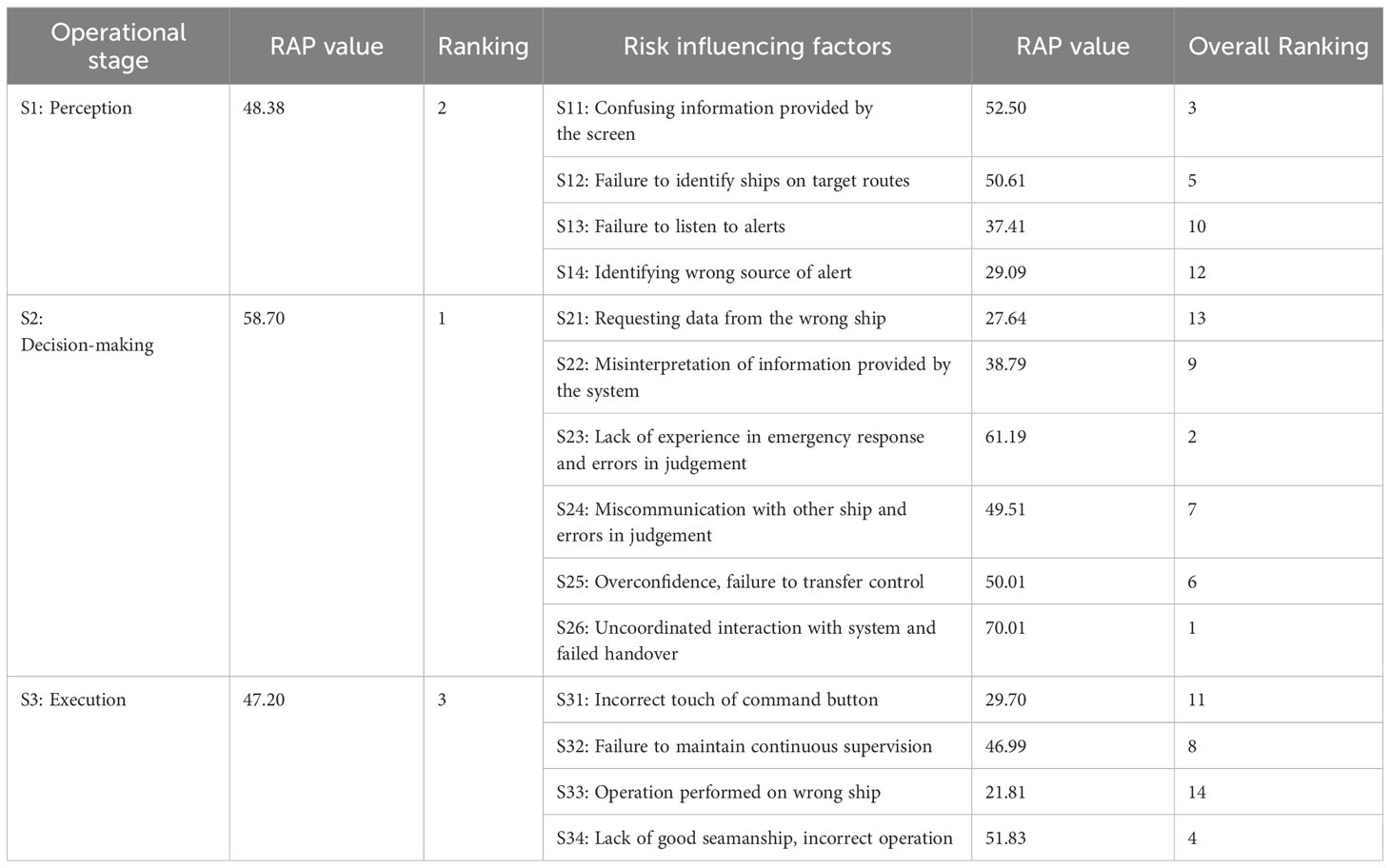
Table 5. Comprehensive ranking of risks in operation stage and risk influencing factors.
The results in Table 5 show that “Uncoordinated interaction with the system and failed handover”, “Lack of experience in emergency response and errors in judgement”, “Confusing information provided by the screen”, “Lack of good seamanship, incorrect operation”, and “Failure to identify ships on target routes” ranked in the top five. These factors are essential for ensuring the operation performance of the HCI system, operator proficiency, and the accuracy and clarity of the system’s information. When a DoA2 MASS is exposed to collision hazards, these human errors are more closely related to accidents. Factors such as “Overconfidence, failure to transfer control”, “Miscommunication with other ship and errors in judgement”, and “Failure to maintain continuous supervision” are medium risks and need to be considered when developing training programmes or assessment criteria. The other factors have lower RAP values and have less impact on MASS safety, but still have some negative impact.
4.5 Verification
To ensure the model’s application is valid in the risk evaluation process, it is imperative to initially confirm the fulfilment of axioms detailed in Section 3.2.5. Simultaneously, relevant results from other human factors studies are cited in Section 4.6 to minimise any potential bias or uncertainty caused by expert subjectivity.
The validation of BBN model is based on three primary axioms. The model’s sensitivity to discrete changes is tested based on Axiom 1. Through reassigning a confidence level of 0.1 to each sub-factor and moving in the direction, that produces the most significant change in the RAP value of the stage. If the model reflects the reasoning logic, the RAP value increases accordingly. The model’s adaptability to continuous change is tested based on Axiom 2. It aims to gauge the impact of various changes in prerequisite attributes on the outcomes. A subjective probability of 0.02 is reassigned incrementally to each attribute, then shifting each prerequisite attribute’s RAP value to its maximum increment, and the subjective probability is observed to vary between the interval [0, 0.1]. The results of the numerical changes in the RAP values are shown in Figure 9, which reveals significant disparities in the influence of subjective probability changes across the prerequisite attributes. Numerical changes are directly proportional to the weights assigned to these attributes, thereby confirming the alignment with Axiom 2.
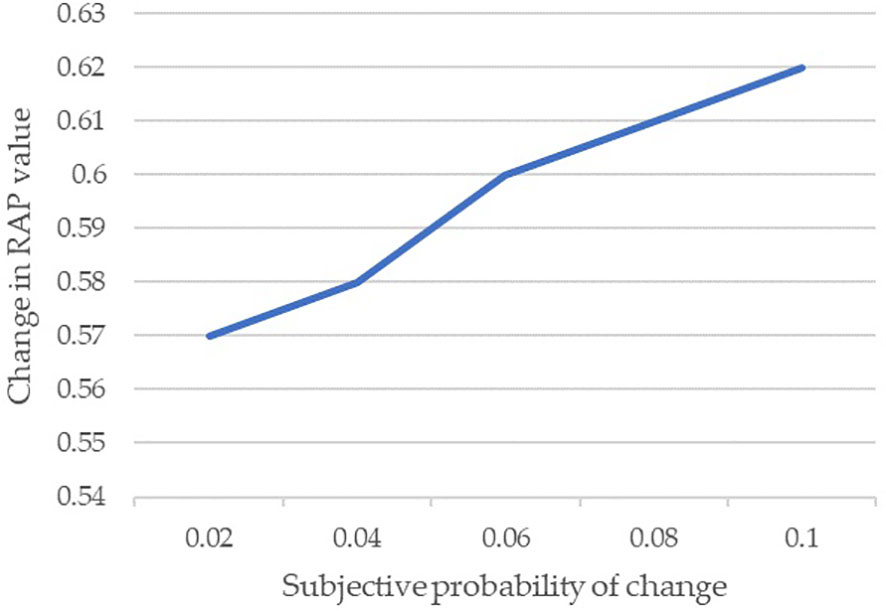
Figure 9. Sensitivity analysis of how changes in the probability values of risk parameters affect the results.
Based on Axiom 3, the effect of changes in subjective probability on outcomes is determined for different combinations of prerequisite attributes. The three risk parameters of subjective probability are reassigned to examine the effect of changes in risk parameters on RAP values, and the seven possible changes are divided into three groups. For example, Group 1 considers only changes in the value of a single risk parameter. Group 2 involves two risk parameter values and observes the impact of changes in combinations of the two parameters.
This research supposes the model with a good reflection of the actual situation. In such a scenario, it becomes clear that the combination impact of a specific set of alterations on the RAP value surpasses the influence of any smaller subset within that particular set. For ease of explanation, the change in the RAP value for “Confusing information provided by the screen” is used as an example. With regard to each risk parameter, a subjective probability of 0.1 is reassigned to different reference values to maximise the change in RAP values. The effects of parameter variations in different combinations on the RAP values are shown in Table 6. Combination #0 represents the initial RAP value, which serves as the reference base for this round of sensitivity analysis. The remaining seven combinations of subjective probability of change are shown in combinations #1 to #7. Taking combination #4 as an illustration, the impact of this specific combination on the RAP value is quantified at 4.18, subsequently, observing the influence of a subset of combination #4 on the RAP value. In the context of this combination, its subsets are combinations #1 and #2. The changes in RAP values for these two subsets are calculated to be 2.52 and 1.64, respectively. Notably, these changes are less than the original 4.18, aligning with the expectations laid out in Axiom 3, affirming the soundness and dependability of this model.
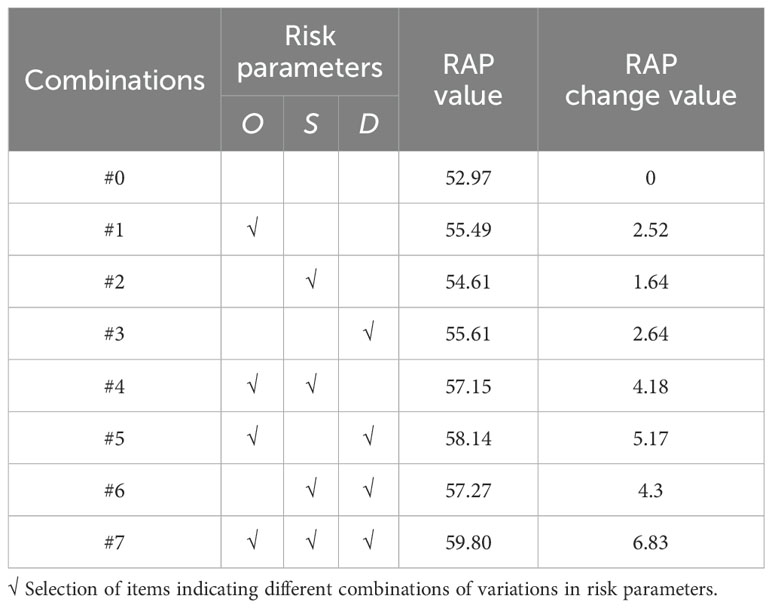
Table 6. Extent of the impact of changes in different combinations of risk parameters on RAP values for S11.
The ER algorithm is used in the risk state aggregation operation to perform sensitivity analysis. Taking the aggregation process of the “perception stage” at the criterion level as an example, a confidence level of 0.1 is assigned to the different levels of P (Confusing information provided by the screen) in a way that would change the risk state more. When the confidence level of P1 is decreased by 0.1, and the confidence level of P5 is increased by 0.1, the RAP value for the “perception stage” increases from 48.38 to 60.63. Similarly, a confidence level of 0.1 is assigned to different levels of P (Failure to identify ships on target routes), and the RAP values for the “perception stage” increased from 48.38 to 51.69. All the aggregation processes for analysing the risk status of the target level are tested by Axiom 1, which indicates that the logic of ER aggregation algorithms carried out in this study is well-found. Furthermore, the output results exhibit high sensitivity, indicating that the ER aggregation algorithm performs in this study is logical.
Again, using the “perception stage” as an example, there are 15 possible combinations of confidence level changes for the four risk factors. These 15 combinations are grouped into four categories according to the number of changes in risk confidence levels. Category 1 considers only the change in the confidence level of a single risk. Category 2 considers the change in the confidence level of two risks. The remaining two categories are varied in combination in the same way. Categories 1 and 2 assign the 0.1 confidence level to the different levels to maximise shifts in risk status. The results of the changes are shown in Table 7. Combination #0 is the reference value for sensitivity validation, i.e., the case where no change is made.
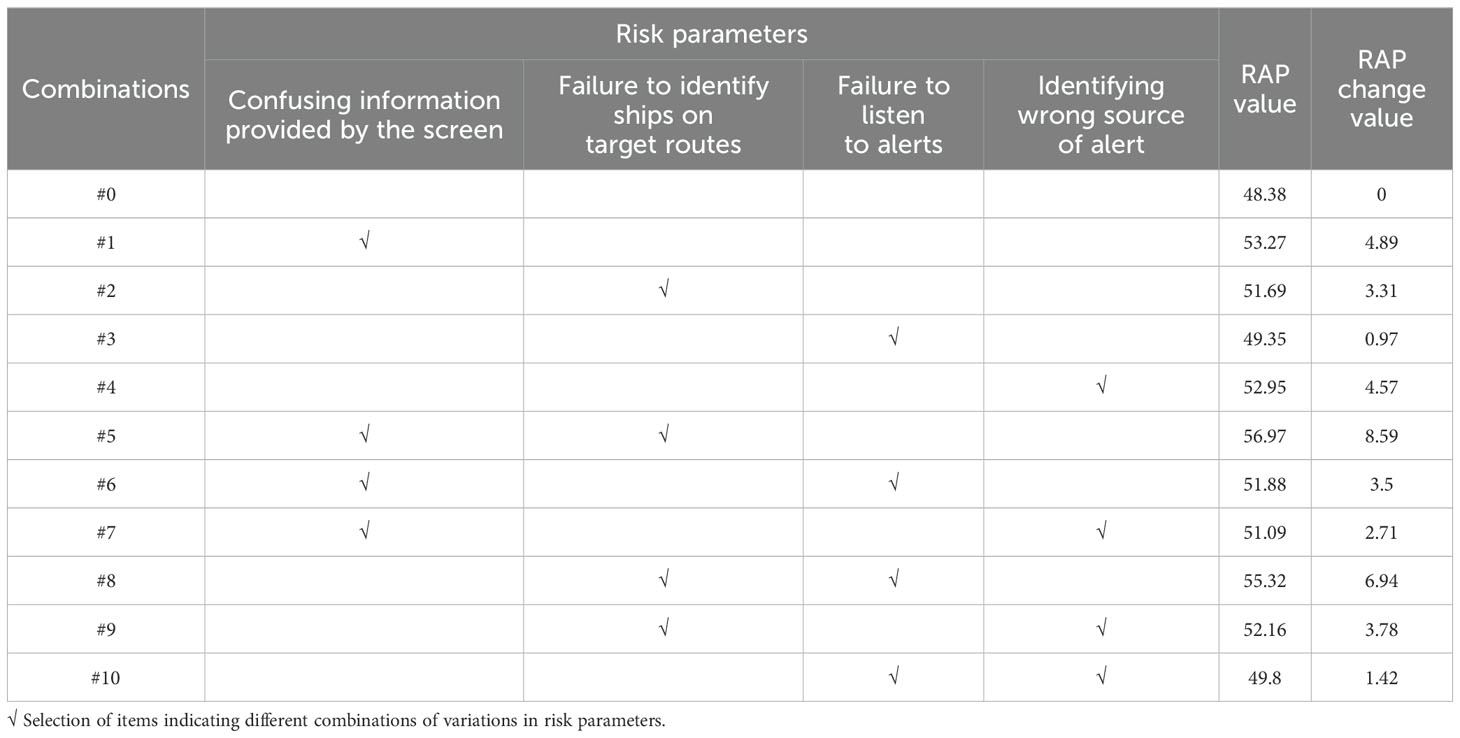
Table 7. Extent to which changes in different combinations of risk parameters affect the RAP value of S1.
In Table 7, combinations #1 and #2 are subsets of combination #5. The corresponding RAP value changes of the former two are 4.89 and 3.31, respectively. These values are smaller than the RAP value change of combination #5 of 8.84, which is consistent with Axiom 2. Similarly, the results obtained from the test and analysis of the aggregation concerning other associated risk factors at the criterion level are consistent with Axiom 2, which indicates that the aggregation operation carried out in this study is reasonable and effective, and the ER method has good operability and feasibility.
4.6 Discussion and implications
Despite the continuous technological advances in autonomous systems, the indispensability of human involvement in the safety of MASS navigation is still undeniable. This view has been validated in studies in different fields, from the skills and experience of the operators to the quality of their interaction with the autonomous system, all of which fall under the purview of human error (Liu et al., 2022a; Man et al., 2018). Operators require the HCI system as an intermediary in the process of controlling the MASS remotely, and the safety operation largely depends on the HCI system. A detailed analysis of the human error associated with autonomous systems is provided as follows, focusing specifically on their impact on overall system performance and safety operation.
“Uncoordinated interaction with the system and failed handover” indicates that, in practice, there are problems with the coordination and transfer of information between the operator and the autonomous system. This may be due to the operator’s failure to fully understand the system’s functions and workings or to the system’s inadequacy in interacting with the operator.
“Confusing information provided by the screen” emphasises the potential for operators to be overloaded with information when monitoring multiple ships, increasing the workload and leading to operator errors in information processing (Abilio Ramos et al., 2019). To solve this problem, the initial step is to enhance the HCI interface and guarantee that information is exhibited to operators understandably and intuitively, consequently minimising information interference. Secondly, a standardised control transfer process is used to ensure a smooth transition of control and improve the controllability of transfer process.
“Failure to identify ships on target routes” indicates that autonomous systems may have deficiencies in target detection and identification. This can also be attributed to operators being distracted from their monitor tasks and failing to make effective use of the information provided by the system. Addressing this issue will require continuous improvement of the sensor technology and recognition algorithms of autonomous systems. Additionally, ensuring that personnel undergo regular and comprehensive training is essential for enhancing their monitoring capabilities.
Operators’ decision-making and response skills are critical to MASS safety. “Lack of experience in emergency response and errors in judgement” underscores the possibility that operators may be unable to rapidly make the correct decisions and take appropriate actions in the face of unforeseen or complicated circumstances. This may be attributed to a lack of practical experience leading to errors in judgment. To enhance the situation, it is imperative to hasten the improvement of emergency plans, augment the number of emergency disposal drills, and refine operators’ emergency response speed and decision-making abilities.
In addition, “Lack of good seamanship, incorrect operation” highlights the potential decline in operator skills stemming from the extended execution of a single task (Man et al., 2018). To avoid this, operators need to be provided with diverse tasks and training to ensure that they maintain a high level of skills and good working conditions. Developing the general qualities of the operators and increasing their safety awareness and vigilance should be a focus.
In summary, both the HCI system and the operator hold pivotal roles in guaranteeing the safety of DoA2 MASS during collision avoidance operational process. These two elements are intertwined and inseparable and together form the core of DoA2 MASS navigation safety. The incorporation of personnel and their synergism with autonomous systems aid in mitigating potential risks of maritime accidents, improving risk control, and enhancing the safety of autonomous ships.
5 Conclusion
The model proposed in this study refines the existing assessment system of maritime autonomous surface ships, enriches the homogeneous human error indexes, and effectively represents the dynamic nature of human computer interaction. This approach presents an effective method for remotely controlled ships in mitigating potential risks in a proactive manner during collision avoidance process. It can also improve the interaction design of the remote-control centre to provide a certain reference value in ship inspection standards. By analysing the likelihood of human error during the emergency response process of remotely controlled ships, it is possible to improve the psychological quality of personnel, facilitate the development of remedial measures, and provide informative decision-making recommendations for the safe navigation of maritime autonomous surface ships.
Identifying risk factors of remotely controlled ships from conventional ship accident reports is one commonly used method to address the current lack of maritime autonomous surface ship data. However, using accident reports solely to identify risk factors is not sufficient. Navigational tasks and accident causation are constantly changing and iterating as new technologies are introduced in maritime autonomous surface ships. Even with a certain number of collision accidents to be reported, these data still cannot provide all the relevant factors. Furthermore, due to the limited number of individuals who have extensively studied safety and human failure of maritime autonomous surface ships, experts are carefully selected to avoid extreme or erroneous judgements. As a result, the collected sample data is limited, which can be further addressed in future with more relevant data being available.
Compared to traditional models, there are differences in human error in the future operation model of maritime autonomous surface ships, especially regarding tasks such as human computer interaction. For example, when operators rely on varying levels of automation for navigation and decision-making, their interactions with these systems evolve significantly. Consequently, the operators’ cognitive processes, situational awareness, and coping strategies are also affected. This study’s predictions of human errors and conclusions serve only as a reference for designing staffing and risk prevention and control measures for the remote-control centre.
In the future, the human error model can be further investigated when the remote-control centre is operational. Human error in maritime autonomous surface ships needs to be analysed from multiple sources, with an identification process that satisfies the principles of mutual exclusion and exhaustion and continuous optimisation.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material. Further inquiries can be directed to the corresponding author.
Author contributions
YZ: Writing – original draft, Visualization, Methodology, Investigation, Conceptualization. ZL: Writing – review & editing, Validation, Supervision, Funding acquisition, Conceptualization. XW: Methodology, Writing – review & editing, Writing – original draft, Funding acquisition, Formal analysis, Conceptualization. HX: Funding acquisition, Data curation, Writing – original draft, Validation. JT: Visualization, Writing – review & editing, Validation, Methodology. JW: Writing – review & editing, Methodology, Formal analysis, Validation, Visualization. ZY: Writing – review & editing, Methodology, Formal analysis, Investigation, Visualization, Software.
Funding
The author(s) declare financial support was received for the research, authorship, and/or publication of this article. The authors gratefully acknowledge support from the National Natural Science Foundation of China (Grant No. 52101399), the Fundamental Research Funds for the Central Universities (Grant No. 3132024139) and the Bolian Research Funds of Dalian Maritime University (Grant No. 3132023617). This work was also supported by the EU H2020 ERC Consolidator Grant program (TRUST Grant No. 864724).
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abilio Ramos M., Utne I. B., Mosleh A. (2019). Collision avoidance on maritime autonomous surface ships: Operators’ tasks and human failure events. Saf. Sci. 116, 33–44. doi: 10.1016/j.ssci.2019.02.038
Ahvenjärvi S. (2016). The human element and autonomous ships. TransNav: Int. J. Mar. Navigation Saf. Sea Transportation 10, 517–521. doi: 10.3390/jmse8010041
Aydin M., Akyuz E., Boustras G. (2024). A holistic safety assessment for cargo holds and decks fire & explosion risks under fuzzy Bayesian network approach. Saf. Sci. 176, 106555. doi: 10.1016/j.ssci.2024.106555
Aydin M., Kamal B., Çakir E. (2023). Evaluation of human error in oil spill risk in tanker cargo handling operations. Environ. Sci. AND pollut. Res. 31, 3976–3994. doi: 10.1007/s11356-023-31402-x
Bakdi A., Vanem E. (2022). Fullest COLREGs evaluation using fuzzy logic for collaborative decision-making analysis of autonomous ships in complex situations. IEEE Trans. Intelligent Transportation Syst. 23, 18433–18445. doi: 10.1109/TITS.2022.3151826
Burmeister H.-C., Bruhn W., Rødseth Ø.J., Porathe T. (2014). Autonomous Unmanned Merchant Vessel and its Contribution towards the e-Navigation Implementation: The MUNIN Perspective. Int. J. e-Navigation Maritime Economy 1, 1–13. doi: 10.1016/j.enavi.2014.12.002
Chae C.-J., Kim M., Kim H.-J. (2020). A study on identification of development status of MASS technologies and directions of improvement. Appl. Sci. 10, 4564. doi: 10.3390/app10134564
Chang C.-H., Kontovas C., Yu Q., Yang Z. (2021). Risk assessment of the operations of maritime autonomous surface ships. Reliability Eng. System Saf. 207, 107324. doi: 10.1016/j.ress.2020.107324
Chang Y. H. J., Mosleh A. (2007). Cognitive modeling and dynamic probabilistic simulation of operating crew response to complex system accidents: Part 5: Dynamic probabilistic simulation of the IDAC model. Reliability Eng. System Saf. 92, 1076–1101. doi: 10.1016/j.ress.2006.05.012
Cui R., Liu Z., Wang X., Fuchi M., Konishi T., Zhou Y., et al. (2023). The evaluation of seafarer fatigue as a performance-shaping factor in the maritime HRA method. ASCE-ASME J. Risk Uncertainty Eng. Systems Part A: Civil Eng. 9, 04023034. doi: 10.1061/AJRUA6.RUENG-1092
European Maritime Safety Agency (2022). Annual overview of marine casualties and incidents. (Lisbon, Portugal: European Maritime Safety Agency
Fan C., Bolbot V., Montewka J., Zhang D. (2024a). Advanced Bayesian study on inland navigational risk of remotely controlled autonomous ship. Accident Anal. Prev. 203, 107619. doi: 10.1016/j.aap.2024.107619
Fan C., Montewka J., Bolbot V., Zhang Y., Qiu Y., Hu S. (2024b). Towards an analysis framework for operational risk coupling mode: A case from MASS navigating in restricted waters. Reliability Eng. System Saf. 248, 110176. doi: 10.1016/j.ress.2024.110176
Fan C., Montewka J., Zhang D. (2022). A risk comparison framework for autonomous ships navigation. Reliability Eng. System Saf. 226, 108709. doi: 10.1016/j.ress.2022.108709
Feng Y., Wang X., Chen Q., Yang Z., Wang J., Li H., et al. (2024). Prediction of the severity of marine accidents using improved machine learning. Transportation Res. Part E: Logistics Transportation Rev. 188, 103647. doi: 10.1016/j.tre.2024.103647
Feng Y., Wang H., Xia G., Cao W., Li T., Wang X., et al. (2024). A machine learning-based data-driven method for risk analysis of marine accidents. J. Mar. Eng. Technol. 1–12. doi: 10.1080/20464177.2024.2368914
Guo C., Haugen S., Utne I. B. (2021). Risk assessment of collisions of an autonomous passenger ferry. Proc. Institution Mechanical Engineers Part O: J. Risk Reliability 237 (2), 425–435. doi: 10.1177/1748006X211050714
Guo Q., Zhang X., Wang X. (2024c). Adaptive dynamic surface control for trajectory tracking of autonomous surface vehicles with input and output constraints. J. Mar. Eng. Technol. 23, 113–121. doi: 10.1080/20464177.2024.2314765
Guo M., Zhou X., Guo C., Liu Y., Zhang C., Bai W. (2024a). Adaptive federated filter–combined navigation algorithm based on observability sharing factor for maritime autonomous surface ships. J. Mar. Eng. Technol. 23, 98–112. doi: 10.1080/20464177.2024.2305721
Guo M. Z., Zhou X. M., Guo C., Liu Y. C., Zhang C., Bai W. W. (2024b). Adaptive federated filter-combined navigation algorithm based on observability sharing factor for maritime autonomous surface ships. J. Mar. Eng. Technol. 23, 98–112. doi: 10.1080/20464177.2024.2305721
Hassani V., Crasta N., Pascoal A. (2017). Cyber Security Issues in Navigation Systems of Marine Vessels From a Control Perspective (Trondheim, Norway: The American Society of Mechanical Engineers (ASME)), 2017 V07BT06A029.
Huang Y., van Gelder P.H.A.J.M. (2020). Collision risk measure for triggering evasive actions of maritime autonomous surface ships. Saf. Sci. 127, 104708. doi: 10.1016/j.ssci.2020.104708
Jian-Bo Y., Dong-Ling X. (2002). On the evidential reasoning algorithm for multiple attribute decision analysis under uncertainty. IEEE Trans. Systems Man Cybernetics - Part A: Syst. Humans 32, 289–304. doi: 10.1109/TSMCA.2002.802746
Johansen T., Utne I. B. (2024). Human-autonomy collaboration in supervisory risk control of autonomous ships. J. Mar. Eng. Technol. 23, 135–153. doi: 10.1080/20464177.2024.2319369
Jovanović I., Perčić M., BahooToroody A., Fan A., Vladimir N. (2024). Review of research progress of autonomous and unmanned shipping and identification of future research directions. J. Mar. Eng. Technol. 23, 82–97. doi: 10.1080/20464177.2024.2302249
Kim M., Joung T.-H., Jeong B., Park H.-S. (2020). Autonomous shipping and its impact on regulations, technologies, and industries. J. Int. Maritime Safety Environ. Affairs Shipping 4, 17–25. doi: 10.1080/25725084.2020.1779427
Lager M., Topp E. A. (2019). Remote supervision of an autonomous surface vehicle using virtual reality. IFAC-PapersOnLine 52, 387–392. doi: 10.1016/j.ifacol.2019.08.104
Lee P., Theotokatos G., Boulougouris E., Bolbot V. (2023). Risk-informed collision avoidance system design for maritime autonomous surface ships. Ocean Eng. 279, 113750. doi: 10.1016/j.oceaneng.2023.113750
Li Z., Zhang D., Han B., Wan C. (2023). Risk and reliability analysis for maritime autonomous surface ship: A bibliometric review of literature from 2015 to 2022. Accident Anal. Prev. 187, 107090. doi: 10.1016/j.aap.2023.107090
Liu J., Achurra A., Zhang C., Bury A., Wang X. (2024). A long short term memory network-based, global navigation satellite system/inertial navigation system for unmanned surface vessels. J. Mar. Eng. Technol. 23, 316–328. doi: 10.1080/20464177.2024.2334029
Liu J., Aydin M., Akyuz E., Arslan O., Uflaz E., Kurt R. E., et al. (2022a). Prediction of human–machine interface (HMI) operational errors for maritime autonomous surface ships (MASS). J. Mar. Sci. Technol. 27, 293–306. doi: 10.1007/s00773-021-00834-w
Liu H.-C., Liu L., Bian Q.-H., Lin Q.-L., Dong N., Xu P.-C. (2011). Failure mode and effects analysis using fuzzy evidential reasoning approach and grey theory. Expert Syst. Appl. 38, 4403–4415. doi: 10.1016/j.eswa.2010.09.110
Liu T., Wang S., Lei Z., Zhang J., Zhang X. (2022b). Trajectory risk cognition of ship collision accident based on fusion of multi-model spatial data. J. Navigation 75, 299–318. doi: 10.1017/S0373463322000066
Liu T., Xu X., Lei Z., Zhang X., Sha M., Wang F. (2023). A multi-task deep learning model integrating ship trajectory and collision risk prediction. Ocean Eng. 287, 115870. doi: 10.1016/j.oceaneng.2023.115870
Longo G., Martelli M., Russo E., Merlo A., Zaccone R. (2023). Adversarial waypoint injection attacks on Maritime Autonomous Surface Ships (MASS) collision avoidance systems. J. Mar. Eng. Technol. 23 (3), 184–195. doi: 10.1080/20464177.2023.2298521
Man Y., Weber R., Cimbritz J., Lundh M., MacKinnon S. N. (2018). Human factor issues during remote ship monitoring tasks: An ecological lesson for system design in a distributed context. Int. J. Ind. Ergonomics 68, 231–244. doi: 10.1016/j.ergon.2018.08.005
Mandal S., Singh K., Behera R. K., Sahu S. K., Raj N., Maiti J. (2015). Human error identification and risk prioritization in overhead crane operations using HTA, SHERPA and fuzzy VIKOR method. Expert Syst. Appl. 42, 7195–7206. doi: 10.1016/j.eswa.2015.05.033
Martins M. R., Maturana M. C. (2013). Application of Bayesian Belief networks to the human reliability analysis of an oil tanker operation focusing on collision accidents. Reliability Eng. System Saf. 110, 89–109. doi: 10.1016/j.ress.2012.09.008
Miyoshi T., Fujimoto S., Rooks M., Konishi T., Suzuki R. (2022). Rules required for operating maritime autonomous surface ships from the viewpoint of seafarers. J. Navigation 75, 384–399. doi: 10.1017/S0373463321000928
Pedersen T. A., Glomsrud J. A., Ruud E.-L., Simonsen A., Sandrib J., Eriksen B.-O. H. (2020). Towards simulation-based verification of autonomous navigation systems. Saf. Sci. 129, 104799. doi: 10.1016/j.ssci.2020.104799
Qiao Z., Zhang Y., Wang S. (2021). A collision risk identification method for autonomous ships based on field theory. IEEE Access 9, 30539–30550. doi: 10.1109/ACCESS.2021.3059248
Rodseth O. J., Tjora A. (2015). A risk based approach to the design of unmanned ship control systems (Lille, France: CRC Press), 153–162.
Shi J., Liu Z., Feng Y., Wang X., Zhu H., Yang Z., et al. (2024). Evolutionary model and risk analysis of ship collision accidents based on complex networks and DEMATEL. Ocean Eng. 305, 117965. doi: 10.1016/j.oceaneng.2024.117965
Song R., Papadimitriou E., Negenborn R. R., van Gelder P. (2024). Safety and efficiency of human-MASS interactions: towards an integrated framework. J. Mar. Eng. Technol., 1–20. doi: 10.1080/20464177.2024.2414959
Tao J., Liu Z., Wang X., Cao Y., Zhang M., Loughney S., et al. (2024). Hazard identification and risk analysis of maritime autonomous surface ships: A systematic review and future directions. Ocean Eng. 307, 118174. doi: 10.1016/j.oceaneng.2024.118174
Thieme C. A., Utne I. B., Haugen S. (2018). Assessing ship risk model applicability to Marine Autonomous Surface Ships. Ocean Eng. 165, 140–154. doi: 10.1016/j.oceaneng.2018.07.040
Utne I. B., Sorensen A. J., Schjolberg I., Asme (2017). “Risk management of autonomous marine systems and operations,” in Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering. [Trondheim, Norway: The American Society of Mechanical Engineers (ASME)]. V03BT02A020.
van de Merwe K., Mallam S., Nazir S., Engelhardtsen Ø. (2024). Supporting human supervision in autonomous collision avoidance through agent transparency. Saf. Sci. 169, 106329. doi: 10.1016/j.ssci.2023.106329
Veitch E., Andreas Alsos O. (2022). A systematic review of human-AI interaction in autonomous ship systems. Saf. Sci. 152, 105778. doi: 10.1016/j.ssci.2022.105778
Wan C., Yan X., Zhang D., Qu Z., Yang Z. (2019). An advanced fuzzy Bayesian-based FMEA approach for assessing maritime supply chain risks. Transportation Res. Part E: Logistics Transportation Rev. 125, 222–240. doi: 10.1016/j.tre.2019.03.011
Wang X., Xia G., Zhao J., Wang J., Yang Z., Loughney S., et al. (2023). A novel method for the risk assessment of human evacuation from cruise ships in maritime transportation. Reliability Eng. System Saf. 230, 108887. doi: 10.1016/j.ress.2022.108887
Wróbel K., Gil M., Chae C.-J. (2021). On the influence of human factors on safety of remotely-controlled merchant vessels. Appl. Sci. 11, 1145. doi: 10.3390/app11031145
Wróbel K., Gil M., Huang Y., Wawruch R. (2022). The vagueness of COLREG versus collision avoidance techniques—A discussion on the current state and future challenges concerning the operation of autonomous ships. Sustainability 14, 16516. doi: 10.3390/su142416516
Wróbel K., Montewka J., Kujala P. (2017). Towards the assessment of potential impact of unmanned vessels on maritime transportation safety. Reliability Eng. System Saf. 165, 155–169. doi: 10.1016/j.ress.2017.03.029
Xia G., Wang X., Feng Y., Cao Y., Dai Z., Wang H., et al. (2023). Navigational risk of inland water transportation: A case study in the Songhua River, China. ASCE-ASME J. Risk Uncertainty Eng. Systems Part A: Civil Eng. 9, 04023042. doi: 10.1061/AJRUA6.RUENG-1158
Yang Z., Bonsall S., Wang J. (2008). Fuzzy rule-based bayesian reasoning approach for prioritization of failures in FMEA. IEEE Trans. Reliability 57, 517–528. doi: 10.1109/TR.2008.928208
Yang Z., Wang J. (2015). Use of fuzzy risk assessment in FMEA of offshore engineering systems. Ocean Eng. 95, 195–204. doi: 10.1016/j.oceaneng.2014.11.037
Yu Q., Liu K. Z., Yang Z. S., Wang H. B., Yang Z. L. (2021). Geometrical risk evaluation of the collisions between ships and offshore installations using rule-based Bayesian reasoning. Reliability Eng. System Saf. 210, 107474. doi: 10.1016/j.ress.2021.107474
Zhang K., Huang L., Liu X., Chen J., Zhao X., Huang W., et al. (2022). A novel decision support methodology for autonomous collision avoidance based on deduction of manoeuvring process. J. Mar. Sci. Eng. 10, 765. doi: 10.3390/jmse10060765
Zhang M., Taimuri G., Zhang J., Zhang D., Yan X., Kujala P., et al. (2025). Systems driven intelligent decision support methods for ship collision and grounding prevention: Present status, possible solutions, and challenges. Reliability Eng. System Saf. 253, 110489. doi: 10.1016/j.ress.2024.110489
Zhang X., Wang C., Chui K. T., Liu R. W. (2021). A real-time collision avoidance framework of MASS based on B-spline and optimal decoupling control. Sensors 21, 4911. doi: 10.3390/s21144911
Zhang M., Zhang D., Yao H., Zhang K. (2020). A probabilistic model of human error assessment for autonomous cargo ships focusing on human–autonomy collaboration. Saf. Sci. 130, 104838. doi: 10.1016/j.ssci.2020.104838
Keywords: maritime safety, maritime autonomous surface ships, human error, risk analysis, FMEA, evidential reasoning
Citation: Zhou Y, Liu Z, Wang X, Xie H, Tao J, Wang J and Yang Z (2024) Human errors analysis for remotely controlled ships during collision avoidance. Front. Mar. Sci. 11:1473367. doi: 10.3389/fmars.2024.1473367
Received: 14 August 2024; Accepted: 21 October 2024;
Published: 12 November 2024.
Edited by:
Ryan Wen Liu, Wuhan University of Technology, ChinaReviewed by:
Maohan Liang, National University of Singapore, SingaporeTao Liu, Shanghai Maritime University, China
Muhammet Aydin, Recep Tayyip Erdoğan University, Türkiye
Copyright © 2024 Zhou, Liu, Wang, Xie, Tao, Wang and Yang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Xinjian Wang, d2FuZ3hpbmppYW5AZGxtdS5lZHUuY24=