 Inam Ullah
Inam Ullah Farhad Ali
Farhad Ali Amin Sharafian
Amin Sharafian Ahmad Ali1,2
Ahmad Ali1,2 Xiaoshan Bai
Xiaoshan Bai- 1College of Mechatronics and Control Engineering, Shenzhen University, Shenzhen, China
- 2College of Computer Science and Software Engineering, Shenzhen University, Shenzhen, China
- 3Department of Accounting and Information Systems, College of Business and Economics, Qatar University, Doha, Qatar
- 4National Engineering Laboratory for Big Data System Computing Technology, Shenzhen University, Shenzhen, China
The underwater Internet of Things (UIoT) and remote sensing are significant for biodiversity preservation, environmental protection, national security, disaster assistance, and technological innovation. Assigning tasks to autonomous underwater vehicles (AUVs) is a fundamental challenge in underwater technology and exploration. Remote sensing and AUVs are vital for pollution detection, disaster prevention, marine observation, and ocean monitoring. This work presents an optimized network connectivity using a multi-attribute decision-making approach for underwater IoT deployment. A feature engineering approach highlights the significant characteristics of underwater things, incorporating remote sensing data, and a multi-objective optimization method is used to select optimal UIoT for effective task allocation in deep-sea environments. A balance between data transmission, energy economy, and operational performance is necessary for efficient task distribution. Effective communication algorithms and protocols are needed to maintain environmental sustainability, protect marine ecosystems, and improve underwater monitoring enhanced by remote sensing technologies. Multi-criteria decision-making (MCDM) is beneficial for addressing various challenges in underwater technology, considering factors such as mission objectives, energy efficiency, environmental conditions, vehicle performance, safety, and much more. The proposed criteria importance through intercriteria correlation (CRITIC) methodology will assess technical competencies like communication, resilience, navigation, and safety in an underwater environment, leveraging remote sensing and aiding decision-makers in selecting appropriate undersea devices and vehicles for enhancing communication and transportation. This method prioritizes characteristics and aligns them with specific objectives, improving decision-making quality in the marine environment.
1 Introduction
Emerging technologies such as the Internet of Things (IoT), machine learning, and big data analytics have revolutionized the lifestyles of common people. In essence, the term “IoT” solely pertains to the networking and communication stratum of the infrastructures in the Information Society, which establish connections between entities or devices and the Internet as well as among themselves. Through the linkage of entities that are ubiquitously present in our surroundings, the IoT has the potential to enhance our interactions with it (Jahanbakht et al., 2021; Gu et al., 2024). The term “underwater Internet of Things (UIoT)” describes an extensive worldwide network of networked underwater items that use embedded sensors, remote sensing technologies, tracking technologies, and the Internet to sense, understand, and react to their environment. Moreover, these gadgets can connect submerged and aboveground objects, including phones. Every underwater object has a fully functional virtual counterpart and is available to the public. Devices are connected to the Internet via the IoT, and underwater things are digitally identified via the underwater IoT (Domingo, 2012; Mariani et al., 2021). However, the lack of advanced sensors limits underwater surveillance technologies and sensor use. Low-power sensors, accompanied by remote sensing, can help address this issue, while marine sensors are crucial for ecological and environmental sustainability and saving lives (Refulio-Coronado et al., 2021).
The collaboration between remote sensing and underwater sensor networks (USNs) represents a significant advancement in marine technology, facilitating more precise and effective monitoring of oceanic conditions (Chen et al., 2022). USNs are employed for oceanography, pollution detection, underwater target detection, offshore exploration, and disaster prevention. These networks utilize unmanned underwater vehicles (UUVs) equipped with sensors specifically designed for underwater environments (Sun and Boukerche, 2018; Zacchini et al., 2022). The exchange of configuration, location, and motion information among these devices is made possible through underwater wireless acoustic networking. The UASN comprises diverse sensors and vehicles collaborating to monitor tasks within a designated area (Akyildiz et al., 2005). The next generation of USNs should have key characteristics such as reliability, robustness, adaptability, security, evaluability, efficiency, scalability, and intelligence, as illustrated in Figure 1 (Luo et al., 2018). Remote sensing is essential in these marine ecosystem procedures because it enables the gathering of data from underwater regions that are difficult to reach. The figure below depicts the fundamental characteristics essential for the future iteration of USNs. These characteristics guarantee that the USNs can operate efficiently and dependably in submerged surroundings.

Figure 1. Performance metrics of UWSNs.
Underwater communications necessitate the continuous monitoring of oceanic regions utilizing pre-existing technologies. However, such monitoring can lead to data loss during an interruption before recovery. To address this issue, it is imperative to establish instantaneous communication between the underwater instruments and the central control devices. This task is achieved by creating a rudimentary underwater acoustic network, which entails establishing a two-way acoustic connection between various devices, including autonomous underwater vehicles (AUVs) and sensors (Zhou et al., 2023). Remote sensing is essential for supplementing these acoustic networks by offering supplementary techniques for collecting data. This network is subsequently linked to a ground station, which can be connected to a host system via radio frequency (RF) communications, such as the Internet. Integrating the remote sensing data can augment the flexibility of such systems. Unlike terrestrial wireless sensor networks (WSNs), which trust radio waves for communication purposes, USNs use acoustic waves, which places a new research challenge in the scheme of MAC protocols. A comparison of various technologies for underwater communication and remote sensing is summarized in Table 1.
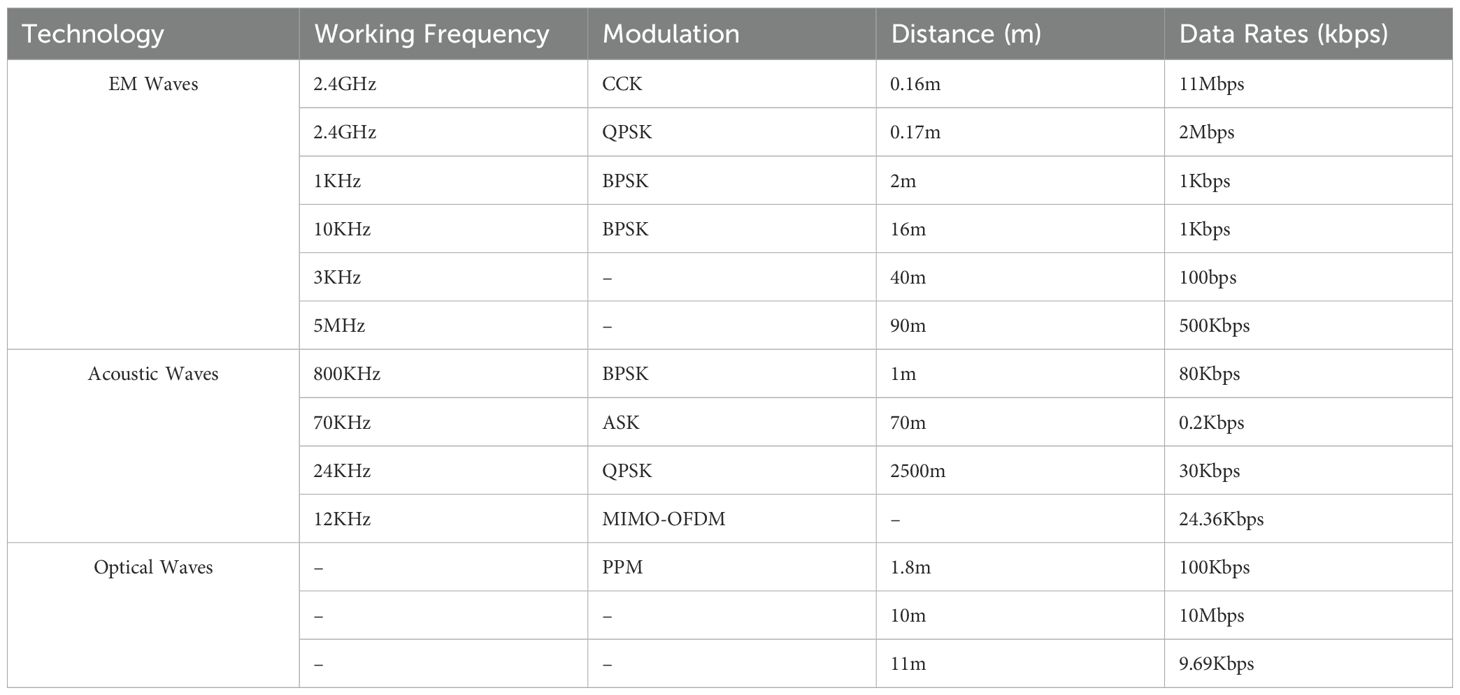
Table 1. Comparison of different technologies used for underwater communications and remote sensing.
Underwater IoT (UIoT) applications utilize various network layers, often defined by the open systems interconnection (OSI) model and TCP/IP protocols. Remote sensing technologies can enhance these applications by offering additional sources of data. The data link layer uses a water channel for reliable transmission, while the physical layer uses specialized underwater communication technology. The OSI architecture uses a unique protocol considering depth, distance, and energy efficiency for packet routing (Luo et al., 2021). Remote sensing data can enhance and refine these techniques. It also handles reliability issues at the transport layer, improving latency and packet loss. The application layer analyzes data from underwater sensor platforms and devices to enable the implementation of IoT applications and services (Jiang, 2018). The use of remote sensing at this layer enables a more thorough analysis of data and the development of applications. Figure 2 shows the data transmission between various layers. The lower four layers of the OSI model comprise the main functionalities required for reliable transfer, which are divided into link and path levels. Link-level function objective is to lessen transmission errors caused by interference, noise, and frame collision between neighboring nodes. Path-level functions endeavor to guarantee end-to-end consistent transfer via network pathways, particularly by addressing packet losses.
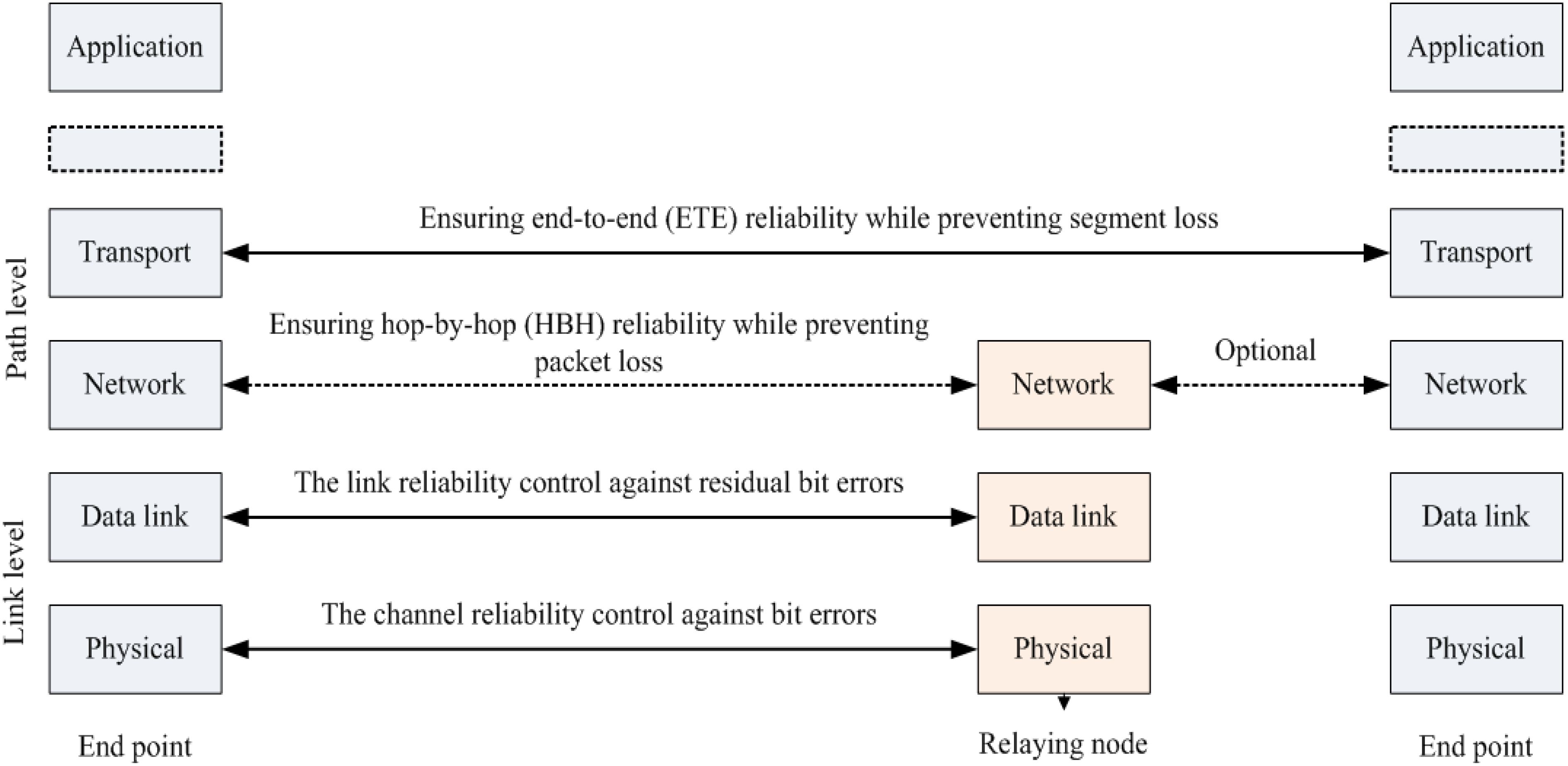
Figure 2. The data transmission between different layers (Zhou et al., 2023).
AUVs utilized on underwater networks possess a promising capability to enhance their operational reach by transmitting control and data signals across extensive networks. AUVs and remote sensing can increase this capability by adding data and improving situational awareness. However, it should be noted that the capacity of shallow water acoustic channels is constrained, and numerous time-varying paths can result in significant symbol interference, as well as notable dispersion and Doppler shifts. To attain the necessary level of energy efficiency, underwater networks necessitate a hierarchical architecture (Sozer et al., 2000). Figure 3 shows the taxonomy of UASN and remote sensing. Underwater wireless satellites, called UWSNs, are crucial in coastal activities such as fish farm control, seabed mining, and water monitoring. Various factors influence underwater ecosystem instability, including temperature, lack of sensing capability, pressure, noise, and water density fluctuations (Abelson et al., 2020). Coping with several challenges, namely transmission delays, high probability of bit errors, limited bandwidth, and occasional loss of connectivity, poses significant problems in this domain (Garcia et al., 2011; Lloret et al., 2011). Moreover, RF signals are attenuated underwater, resulting in lower data rates and lesson remote sensing at very low frequencies. Alternatively, optical signals may not be useful due to light scattering in the underwater remote sensing environment. Acoustic modems fill a gap in existing technologies and must be energy efficient and economical due to the limited energy resources in the aquatic environment remote sensing. The hardware required to transmit audio signals is inexpensive, but transmission times are much slower than electromagnetic (EM) modems, at about 1500 m/s (Frampton, 2006; Farr et al., 2010).
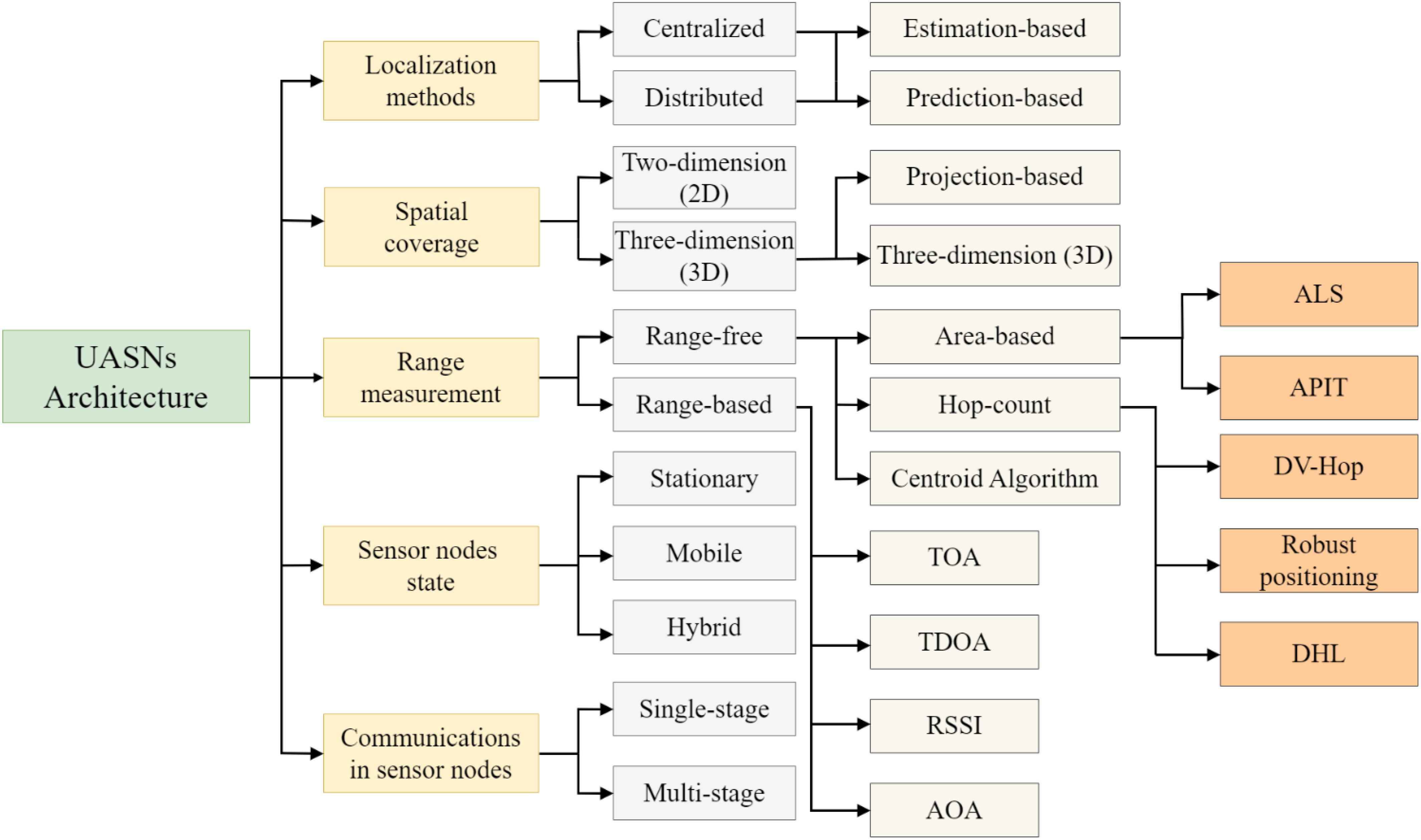
Figure 3. The taxonomy of underwater acoustics sensor networks (UASNs).
The UIoT and remote sensing haven’t received widespread attention due to their recent discovery and lack of scientific progress. Although 44% of the Earth’s people live 150 kilometers or less from the ocean, 95% of the ocean’s surface remains unexplored. Oceans cover 70% of the Earth’s surface and provide habitat for nearly 500 million people. The development and use of underwater exploration in UIoT can have a significant impact on people’s lives. Due to the advancement in remote sensing and WSNs, the IoT has gained popularity for monitoring various applications, including volcanic activity, forest fire detection, air quality assessment, and home automation systems. However, underwater applications face challenges like sensor deployment and maintenance, energy acquisition, manufacturing costs, sensing issues, and signal propagation issues. Advanced wireless communication and sensing techniques are needed for underwater applications, which can be achieved through three-dimensional (3D space and algorithm placement). These networks offer opportunities for systematic examination of the underwater environment, including climate change impacts, deep-sea habitat research, sensing applications, coral reef population observations, ecological observation, military applications, mine exploration, water quality monitoring, disaster prevention systems, aquaculture supervision, and oceanic data collection and navigation (Sendra et al., 2015; Khan et al., 2023). Thus, UWSNs present a promising solution for various applications of remote sensing in the open sea. This work’s key objectives are as follows:
● To expedite the use of modern technology for the AUV navigation and sensing system to enhance communication and networking.
● To collect and retrieve various parameters, such as water quality, pressure, etc., that directly influence the behaviors of aquatic life and the UIoT.
● Using feature engineering strategy to highlight the significant characteristics of underwater things for efficient and effective sensing and tracking operations.
● To design a multifaceted criteria importance through intercriteria correlation (CRITIC)-based approach to prioritize and assess the essential attributes of UIoT for efficient task allocation and sensing in UIoT.
The rest of the article is organized as follows: Section II presents the overall literature review in the domain of underwater things, whereas Section III presents the methodology of the proposed model. Moreover, Section IV illustrates the results and discussions, while Section V concludes this work.
2 Literature review
Examining the extensive oceans, which cover two-thirds of the Earth’s surface, requires UWSNs to understand this immense expanse fully. Future projections suggest that the market for AUVs is expected to grow substantially, with a compound annual growth rate (CAGR) of USD 1.638 billion by 2025. This represents a notable surge from the USD 638 million recorded in 2020. The applications of AUVs can be commercial, oceanographic, environmental, military, sensing, and more. Examples of commercial activities are surveying, port monitoring, and geophysical and archaeological research (Li et al., 2023; Wang et al., 2023). Scientific/oceanographic missions require seabed exploration, remote sensing, and water body exploration. Environmentally significant applications include habitat monitoring and water quality sampling. Anti-submarine warfare and border security are examples of military/defense activities. Shallow and medium water is the most typical deployments of AUVs in coastal waters (Brasier et al., 2020; Duan et al., 2020). Wireless charging in remote oceanic environments is expected to drive steady growth in the foreseeable future. The AUV Repository lists over 1,050 underwater platforms from over 350 universities, including standard components like battery modules, propulsion systems, sensing capacity, communication systems, navigation systems, and collision avoidance systems (Tian et al., 2023). However, the inertial navigation system’s long-term accuracy is limited by accelerometer drift. To address this, ultra-short baseline or long baseline transponder systems can be used, or simultaneous localization and mapping (SLAM) can be employed (Cao et al., 2021; Hoeher et al., 2021).
However, current networks are hardware-centric, rigid, and need more resource-sharing capabilities. New models, such as software-defined technologies, have emerged to improve UWSNs by providing robustness, flexibility, adaptability, programmability, resource sharing, and easy administration (Sun and Boukerche, 2018). These technologies include software-defined networking (SDN), software-defined radio (SDR), network function virtualization (NFV), cognitive acoustic radio (CAR), underwater IoT sensing, and sensor clouds, turning network resources into software, improving resource efficiency and simplifying network management. These technologies could transform traditional UWSNs into next-generation, software-based, programmable, customizable, and service-oriented networks.
Many challenges arise when deploying IoT devices and networks in aquatic environments or underwater IoT for remote sensing purposes. These include challenges related to signal propagation and transmission in water, building and maintaining robust underwater positioning and navigation systems, optimizing energy efficiency for long-term operation, data processing and retrieval in low-bandwidth environments, and manufacturing waterproof and durable hardware (Arul et al., 2021; Wei et al., 2021). The data rates and usual bandwidth for underwater channels with different ranges are shown in Table 2 (Moradi et al., 2012). The underwater environment is particularly harsh and corrosive, making it difficult to build long-lasting sensors, secure networks, and keep sensors working as intended. Addressing these issues is crucial for the successful implementation of underwater IoT applications, from environmental monitoring to underwater robotics and exploration.
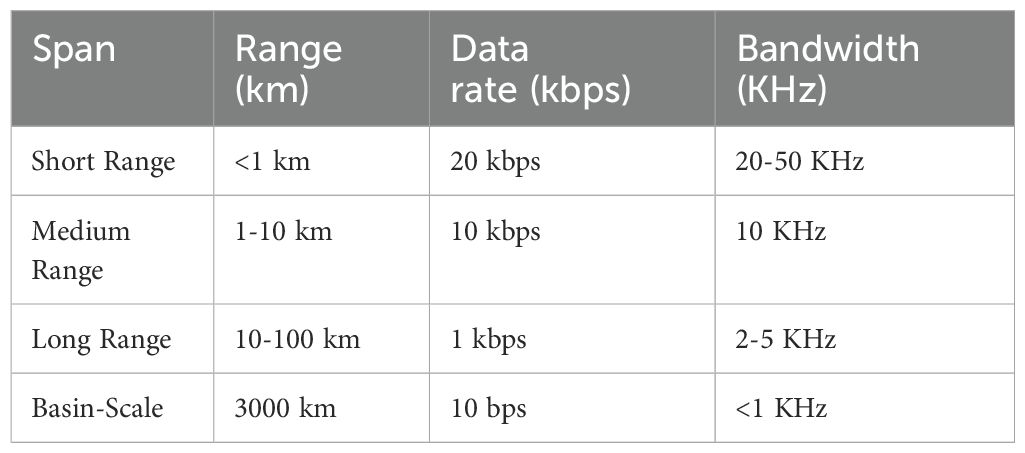
Table 2. Typical bandwidth and data rates for underwater channels with different ranges.
Autonomous underwater vehicles, or AUVs, are automated submersible platforms capable of operating at a maximum depth of three thousand meters. In 1957, the self-propelled underwater research vehicle (SPURV) became the inaugural AUV (Yang et al., 2021). Over the past six decades, AUV techniques have undergone significant advancements, enabling them to perform sensing tasks autonomously without human intervention (Bai et al., 2018). AUV navigation systems play a vital role in their operation by allowing computers and onboard sensors to govern and guide their movements. However, navigation and remote sensing can be exceedingly challenging due to the attenuation of GPS signals in submerged scenarios. Promising technologies, including cooperative navigation (CN) and SLAM, which can be swiftly implemented and adjusted with minimal infrastructure, are being proposed as potential solutions to this predicament. AUVs typically use batteries, but lithium batteries are now widely used due to their rechargeability and cost-effectiveness (Rymansaib et al., 2023). AUVs can serve as sensing platforms for various sensors, including echo sounders, underwater laser scanners, forward-looking sonars, and conductivity temperature depth sensors.
Ocean engineers are investigating over-actuated and under-actuated underwater vehicles. Over-actuated vehicles align with trajectories using surge, sway, and heave actuators, while under-actuated vehicles pitch and yaw. Tolerable thrust forces, damping limits, and inertia effects limit these models’ attitude. Marine vehicles are managed remotely by input, status, and output barriers. A supplementary system and Doppler Indicator (DI) optimization are applied to track a fully-actuated underwater vehicle (He et al., 2022). In the event of a tracking error occurring within a confined area, the vehicle simultaneously moves in both the rightward and forward directions. Through simulations and experiments conducted under three different scenarios, the efficiency of the proposed strategy has been demonstrated with the tracking error confined to a narrow zone (Cao et al., 2022). A novel open-water path planning strategy called UP4O is designed for AUVs operating in challenging water conditions (Yang et al., 2022). The strategy uses an environmental encoder module to bind local obstacle data and combine it with relative position, velocity, and ocean currents, resulting in continuous operational decision-making using local dynamic information. The system has a diverse state space with at least 26 actions, ensuring motion accuracy and minimizing deviations from ocean current vectors (Yan et al., 2014). Experimental results support UP4O’s ability to accelerate convergence and provide smoother paths in complex oceanic environments.
The domain of designing control systems for robotic arm systems and underwater vehicles is explained. The main focus is on the mathematical analysis of singular perturbation theory. Two control rules were proposed: one that is more straightforward and partially compensates for the sluggish subsystem and another that is a resilient nonlinear control not influenced by model parameters. The stability of both control rules is demonstrated using perturbation theory, and the performance of the suggested controller in a closed-loop system can be compared to that of a model-based correction (De Wit et al., 2000). Marine robotics has revolutionized the use of remotely operated underwater vehicles (ROVs) in science and industry, enabling humans to perform tasks like moving objects across long distances. The effectiveness of single- and multi-ROV systems depends on the right tracking controller. Issues related to individual ROV tracking include energy efficiency, Lyapunov-based model predictive control, feedback and linearization techniques, adaptive algorithms, proportional-derivative control, area tracking controllers, auto-tracking controller adjustment, multivariate control techniques, high-order adaptive sliding mode controllers, controllers based on models (Yan et al., 2019). Following the Deepwater Horizon disaster in 2010, public attention shifted to monitoring the subsurface sea environment (Vasilijević et al., 2017). Remote sensing technologies have proven effective for terrestrial disasters, but detecting and measuring underwater pollution requires field methods (Hao et al., 2022). A joint robotic system combining autonomous underwater and unmanned autonomous surface vehicles is proposed to rapidly detect/sense and quantify contaminants in the water column in situ. This system enables real-time contamination readings while minimizing human intervention and time commitments.
Autonomous underwater navigation relies on efficiency and autonomy, with dead reckoning techniques relying on proprioceptive data from compasses, Doppler Velocity Logs, and Inertial Navigation Systems. However, positioning errors tend to magnify over time, necessitating absolute georeferenced sources for precise positioning. Time-of-flight (ToF) acoustic positioning systems are the current method for correcting underwater positions and sensing (Li et al., 2018). As technology and hydroacoustic communication standards for AUVs continue to advance, CN may become a highly accurate method for locating multiple underwater vehicles. CN allows a group of AUVs to mutually estimate their current positions based on relative distance, velocity, and acceleration (Lyu et al., 2022). Figure 4 illustrates the USN and AUV architecture. The surface components like satellites, drones, ships, base stations, surface sinks, and servers aid communication and data management. AUVs communicate with stationary seabed sensors and other underwater mobile nodes. The Surface and underwater components communicate by two-way packet exchange and via wireless signals, safeguarding effective data collecting and network coordination in diverse underwater environments.
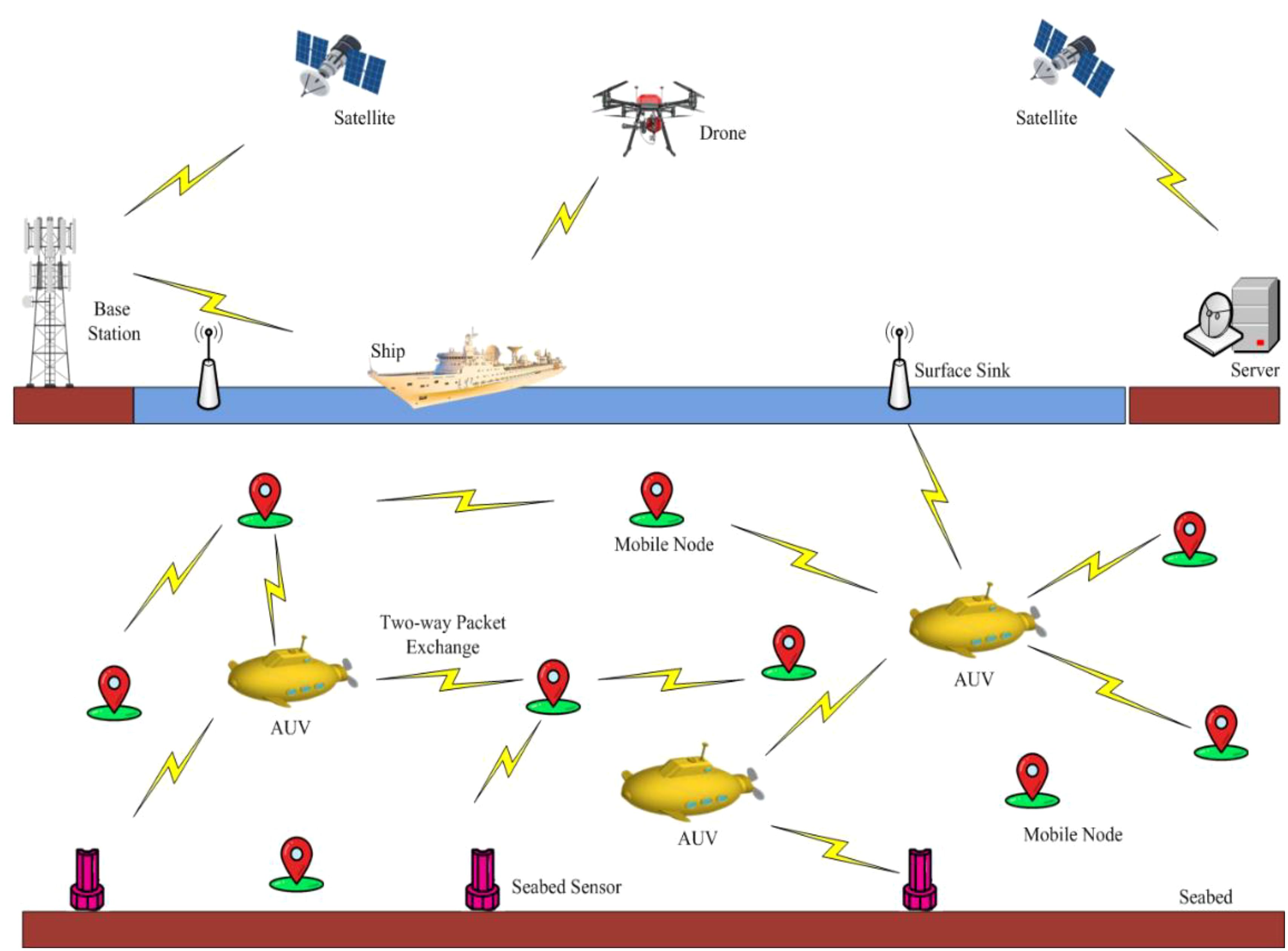
Figure 4. Remote sensing communication and navigation in deep-sea environment.
By utilizing ocean currents as control inputs during way-point tracking missions, the power consumption of the engine is reduced. The controller effectively considers multiple constraints, such as those related to the workplace, the vehicle’s maximum speed, sensing capacity, the saturation of control inputs, and the presence of rare obstacles. The proposed technology accounts for all the vehicle dynamics, including ocean currents, enabling optimal thrust determination to minimize errors in waypoint tracking (Heshmati-Alamdari et al., 2019). Utilizing the ocean currents for control inputs during waypoint tracking missions reduces the power consumption of the engine. Analytical guarantees for stability and convergence are established for closed-loop systems. The presented work focuses on utilizing AUVs to monitor underwater pipelines and gather data from submarine networks (SNs) within the transmission range. This collected data is transmitted to a surface borehole using acoustic communication technology. This approach reduces power consumption, and the need for costly data re-transmissions is avoided. This architectural framework is well-suited for data applications that can tolerate latency and provide flexibility in implementing submarine networks. Various algorithms for AUV motion and remote sensing are put forth, and an investigation is conducted to determine the impact of the system on network performance. Furthermore, the system can be optimized by considering design parameters, such as SN density, distance, network reliability, medium access control (MAC), communication channel conditions, security measures, and quality of service (QoS) requirements (Jawhar et al., 2018).
Despite development in AUVs and underwater wireless sensor networks (UWSNs), there are still several limitations. The existing hardware-focused networks cannot exchange resources or familiarize themselves with software-defined solutions. Accelerometer drift disturbs navigation system accuracy, necessitating further research. Due to energy efficiency, localization, sensing, and navigation system resilience issues in demanding underwater environments, IoT device installation and conservation must be enhanced. Current challenges include creating long-lasting, water-resistant sensors and efficient data processing in low-network settings. Novel control and path planning systems like UP4O must also be authenticated in complex marine surroundings. The existing problems must be addressed to increase the performance, reliability, and expandability of AUVs and UWSNs. This will enable future advanced, flexible, and effective marine systems.
3 Methodology
Multi-criteria optimization is crucial for selecting the most efficient UIoT for underwater task assignment and sensing (Song, 2020; Fang et al., 2021). These devices must be chosen based on energy efficiency, communication range, remote sensing capacity, data transmission capability, durability, and adaptability to dynamic oceanic environments. The effectiveness of IoT devices depends on the specific objectives of underwater operations, such as accurate data collection in oceanography and robust and durable devices for marine remote sensing infrastructure repair work. Multi-criteria optimization helps decision-makers select IoT devices that align with operational goals and requirements. It also addresses trade-offs between features like energy efficiency and data transmission capabilities, ensuring the efficiency and effectiveness of IoT deployments tailored to specific underwater sensing applications. The optimal selection of vehicles based on multi-criteria is shown in Figure 5. Starting with the UIoT, digital library articles are assessed. These articles undergo feature engineering to extract relevant features. The selected features are evaluated for sufficiency. After recognizing significant attributes, ideal vehicles are selected using multi-criteria evaluation.
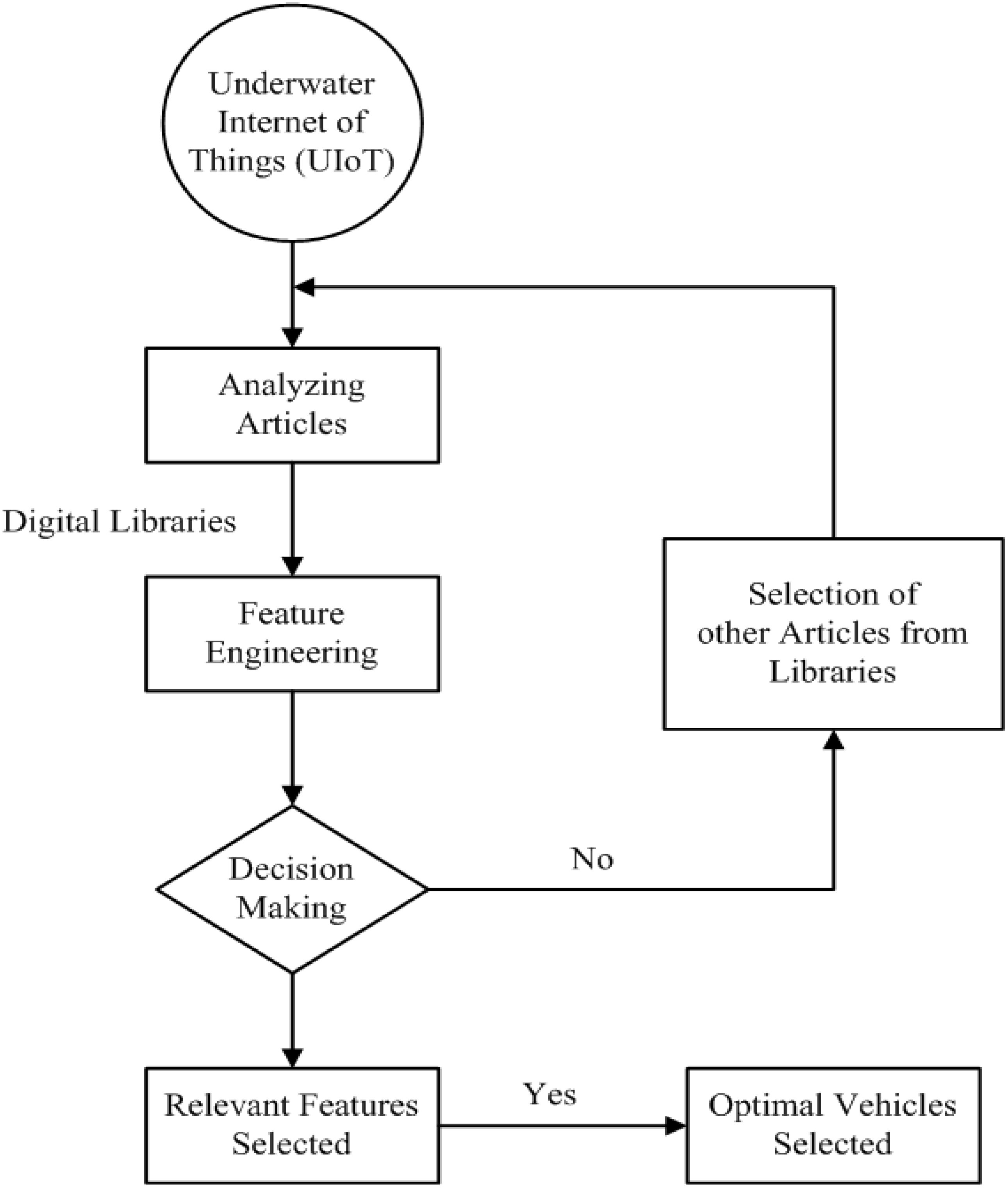
Figure 5. Optimal selection of vehicles based on multi-criteria.
3.1 Feature engineering
An important and challenging aspect of the UIoT is to identify the unique characteristics of the underwater sensing environment through an in-depth review of previous research (Zhu et al., 2023). These characteristics include energy efficiency, water pressure, contact closure, resistance to corrosion, salinity, sensing issues, and temperature. Understanding and specifying these characteristics is important for effectively deploying IoT devices in an oceanic environment, as they directly affect network performance and reliability. Functional engineering is essential for optimizing IoT devices for specific underwater tasks such as oceanography, where data accuracy is critical, or maritime/oceanic infrastructure maintenance, where reliability and durability are priorities. As feature development is versatile, IoT devices may be customized to meet specific remote sensing needs. Functional engineering also promotes using and integrating cutting-edge scientific innovations and findings.
Engineers and researchers may uncover new possibilities and chances that extend the remote sensing potential of IoT devices by evaluating relevant literature and considering the latest developments. In addition to revolutionizing IoT technology, this iterative approach to feature development will produce creative solutions for applications emerging in underwater or oceanic environments. Feature engineering is essential to underwater IoT, enabling decision-makers to select, modify, and design IoT devices tailored to underwater remote sensing applications’ needs and objectives. The UIoT is a network of submerged devices and systems that enable efficient communication, cooperation, and data transmission. These resilient and adaptable systems allow aquatic systems to withstand environmental pressures and recover from disturbances. Their flexibility allows them to respond to dynamic changes and gather oceanic research and exploration data.
Interoperability and integration are significant in the IoT, fostering collaboration and data exchange between devices. The dependability and efficiency of underwater technologies ensure consistent service provision, while their durability ensures functionality over time. Tolerance mechanisms and collision avoidance ensure secure sensing, navigation, and operations. Both bound and unbound deployment options allow flexibility in deployment. The visibility of the IoT enables real-time monitoring and visualization of underwater conditions, facilitating data analysis and seabed mapping for scientific research and exploration. These capabilities enable multitasking, responsiveness, and controllable sub-sea systems that provide essential services and data analytics, revolutionizing the way we explore and comprehend the vast depths of the ocean. The various key characteristics of underwater vehicles are illustrated in Figure 6.

Figure 6. Various key characteristics of underwater vehicles.
3.2 Decision making
Ocean engineering is a rapidly developing field that relies on decision-making to guide undersea technologies. Researchers, producers, and institutions are constantly improving underwater vehicles to sense, navigate, and explore deep oceans (Rolland et al., 2023). These vehicles are designed for security, resource exploitation, remote sensing, ecological protection, and scientific investigation. Their creation ensures wise choices for the submerged environment, preserving marine ecosystems for future generations and allowing exploration of mysterious deep-sea enclaves (Borja et al., 2020). The ultimate goal is to provide creative and effective solutions for the vast, unexplored oceans.
3.3 Feature selection
The UIoT faces challenges in identifying unique underwater characteristics like power usage efficiency, water pressure, sensing issues, contact closure, corrosion resistance, salinity, and temperature (Khalil et al., 2020). These factors directly impact the remote sensing network’s performance and reliability. Functional engineering promotes the use of state-of-the-art scientific discoveries and innovations, allowing engineers and researchers to assess the literature and consider recent advancements to uncover novel attributes and capabilities. This iterative approach revolutionizes IoT technology and provides innovative solutions for underwater/oceanic applications. Functional design is at the core of the UIoT, enabling decision-makers to choose, tailor, and design IoT devices to meet underwater remote sensing application requirements.
3.4 Multi-criterial decision making in UIoT
The Internet of vehicles (IoV) presents a challenge for policymakers and stakeholders in selecting optimal vehicle solutions to improve operations and productivity. Multi-criteria decision-making (MCDM) methodologies, such as the analytical hierarchy process (AHP) and Technique for Order of Preference by Similarity to Ideal Solution (TOPSIS), help assess and prioritize vehicles across various dimensions, including fuel effectiveness, connectivity, environmental impact, safety attributes, and cost efficiency. These approaches provide a structured framework for informed choices, enabling stakeholders to navigate various alternatives, ultimately leading to efficiency, sustainability, and innovation in the transformative sector.
The UIoT aims to revolutionize underwater activities by combining interconnectivity, data sharing, and real-time monitoring. It enhances operational efficiency and predictability by enabling effective task control, route tracking, sensing, and location determination. UIoT’s manoeuvrability, adaptability, multitasking, resource management, continuous integration, and efficient telemetry further enhance operational capabilities. It also provides durability, protection, safety, and resilience, promoting real-time monitoring and accountability in harsh environments. The responsiveness of IoT systems supports their reliability and interoperability, enabling seamless functioning and interaction. These capabilities can potentially revolutionize underwater remote sensing operations and usher in a new era of subsurface exploration and data collection. The overall methodology of this study is represented in Section 4, and the characteristics that are collected by properly analyzing existing approaches are presented in Table 3.
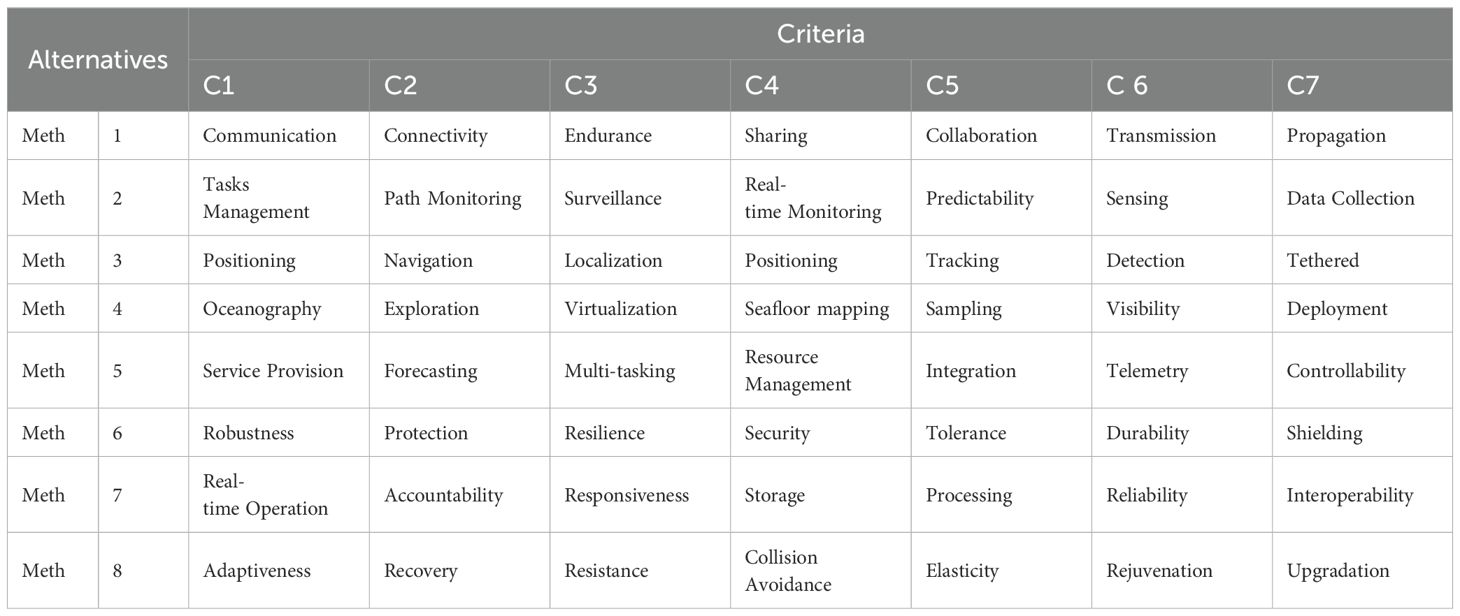
Table 3. Multi-criteria-based optimal feature selection of underwater vehicles.
4 Results and discussions
The detailed methodology and the evaluation results of the proposed approach are presented in the below subsections.
4.1 CRITIC approach
A technique utilized in MCDM to help with complex selection procedures where multiple factors require evaluation is called the CRITIC choice-making strategy. It works especially well when assessing and ranking choices or alternatives in situations where there is a lot of ambiguity and mutual dependence. Rather than considering each decision criterion separately, CRITIC focuses on their interrelatedness. Adapting to complicated and evolving decision situations, reducing subjectivity in weight distribution, and understanding hidden linkages between factors are only a few advantages of the CRITIC technique. It provides an organized and systematic manner to rank and incorporate multiple factors during the selection process, making it an extremely valuable tool across a wide range of industries, including sustainability management, engineering, finance, and healthcare. When everything is said and done, the CRITIC choice-making strategy offers a solid and methodical way to handle complicated problems that need a careful examination of criteria connections. These steps involved in the mechanism of the CRITIC calculation are portrayed in Figure 7.
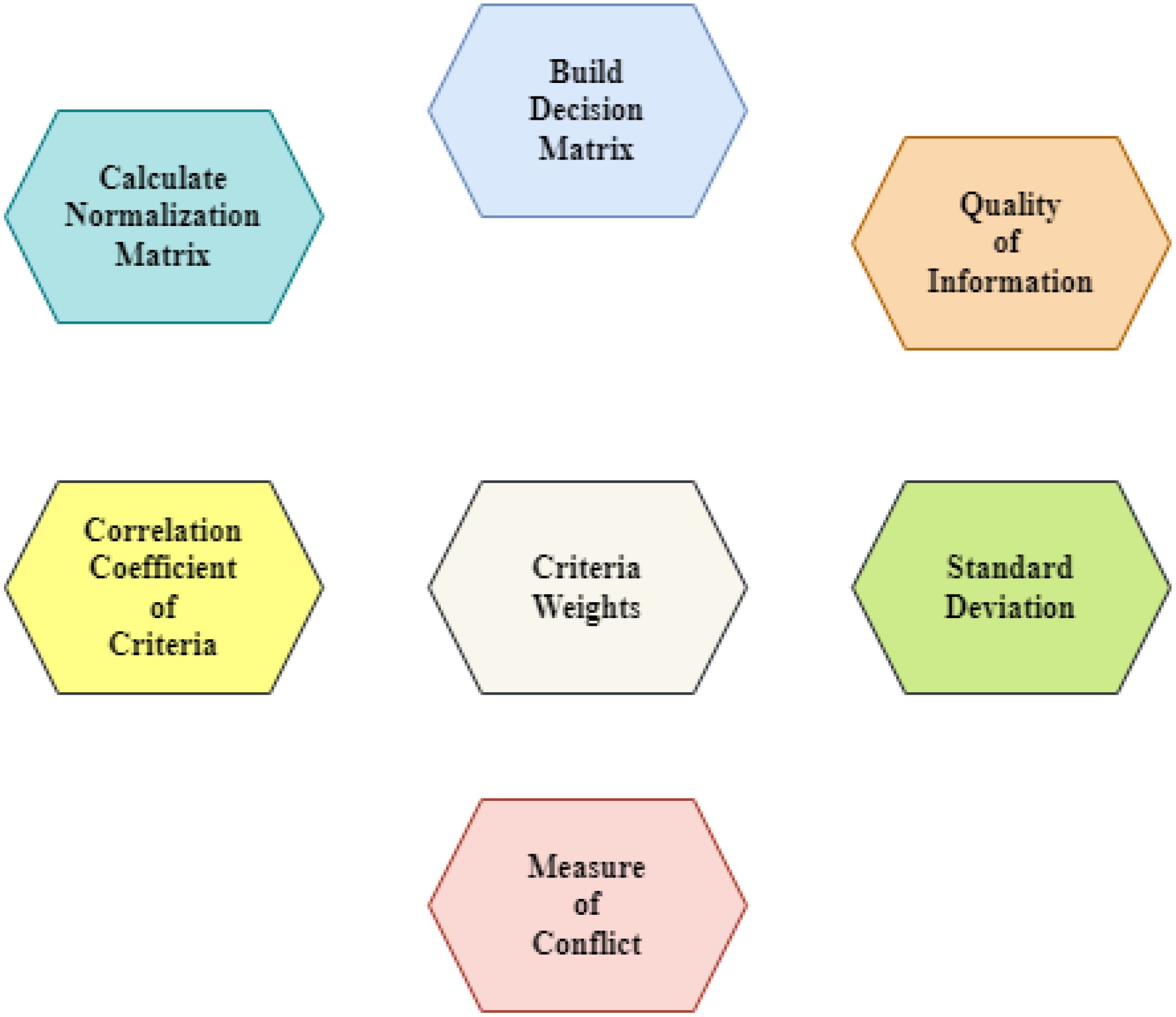
Figure 7. Representation of various (CRITIC approach) steps for underwater Things.
The CRITIC technique assesses every criterion’s significance by considering its relationships to other factors in addition to subjective perceptions. This implies that the method considers the possible consequences of altering one of the factors on others, resulting in a more accurate and comprehensive depiction of the decision problem. Decision-makers estimate every criterion’s relative importance to all other factors by comparing them pairwise, creating an inter-criteria correlation matrix. After that, the ultimate weights for the criteria are obtained by subjecting this matrix to a number of mathematical operations, many of which include dynamic investigation.
Furthermore, all the chosen factors in the proposed work are beneficial. The chosen factors impact the alternatives more, which we can find after determining their weightage. The weights were assigned to every criterion based on their importance, according to expert opinion, using a scale ranging from one (1) to nine (9). The one value illustrates the equal significance of one factor over another. In contrast, the nine values state the extreme significance of one factor over another while comparing them against each other using the CRITIC approach. A 7 * 7 matrix has been constructed using Equation 1, and weights are distributed among criteria as per expert opinion. These factors have been properly comprehensively compared against each other to determine the precise weightage of each criterion and determine their significance and impacts on the required alternatives. The evaluation matrix has been designed for eight alternatives based on specific factors. The maximum and minimum values have also been determined from every column, which states that every maximum value is the highest and the minimum is the lowest due to the beneficial nature of all the criteria. The alternatives have been set in rows, while the criteria have been set in columns, as depicted in Table 4.
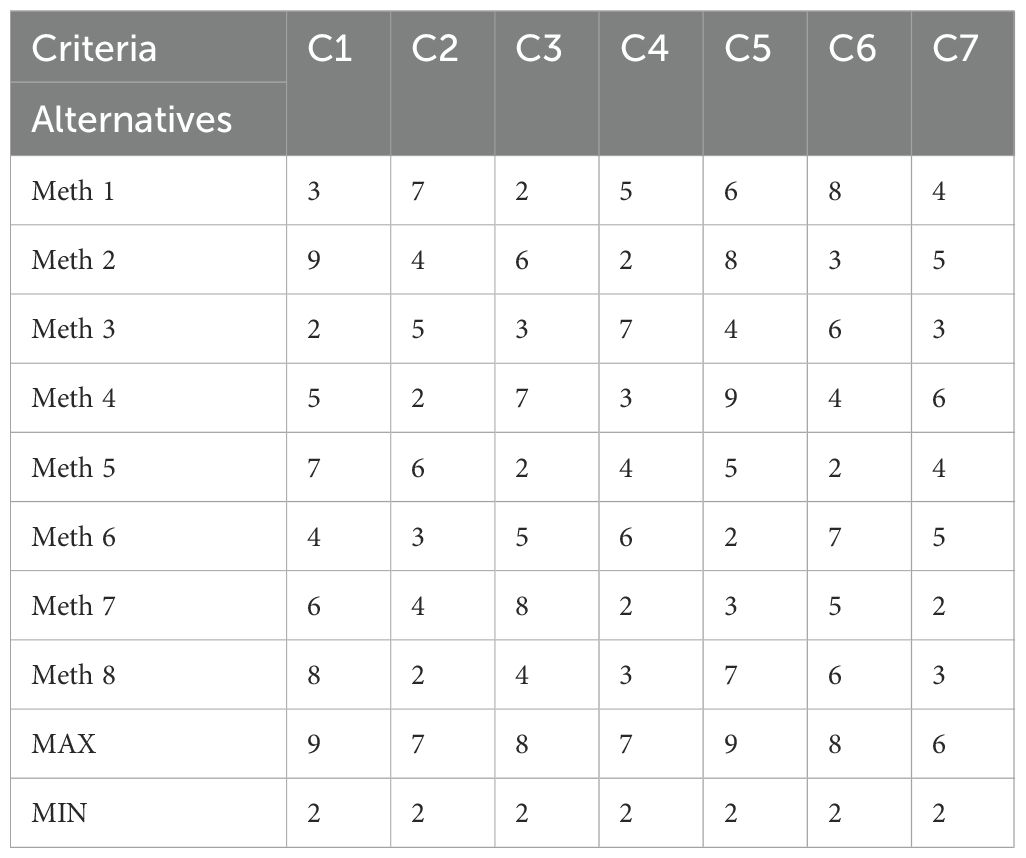
Table 4. Evaluation matrix.
Here, the original matrix has been normalized through the utilization of Equation 2, as given below;
Where, indicates the normalized outputs, and it is essential to realize that normalization does not account for the kind of criterion.
The constructed matrix has been undergone to normalize original values by utilizing Equation 2 to reduce subjectivity and remove errors. The outcomes obtained from the entire calculation of the normalization process are listed in Table 5.
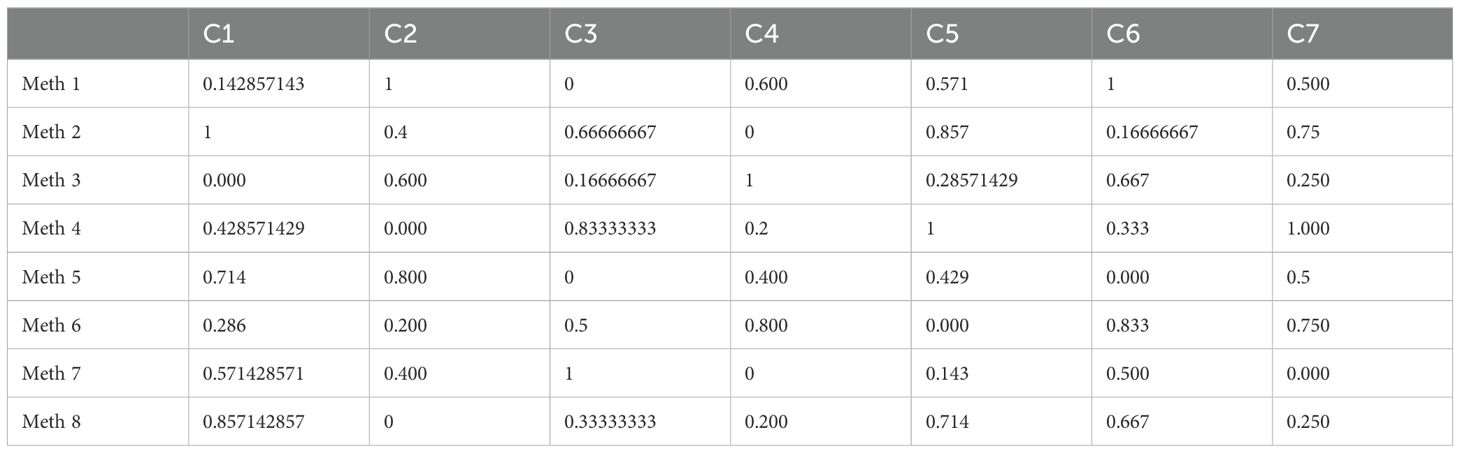
Table 5. Normalized matrix.
Equation 3 has been applied to the normalized matrix to obtain the standard deviation outputs. The entire calculation and obtained outputs are listed in Table 6.
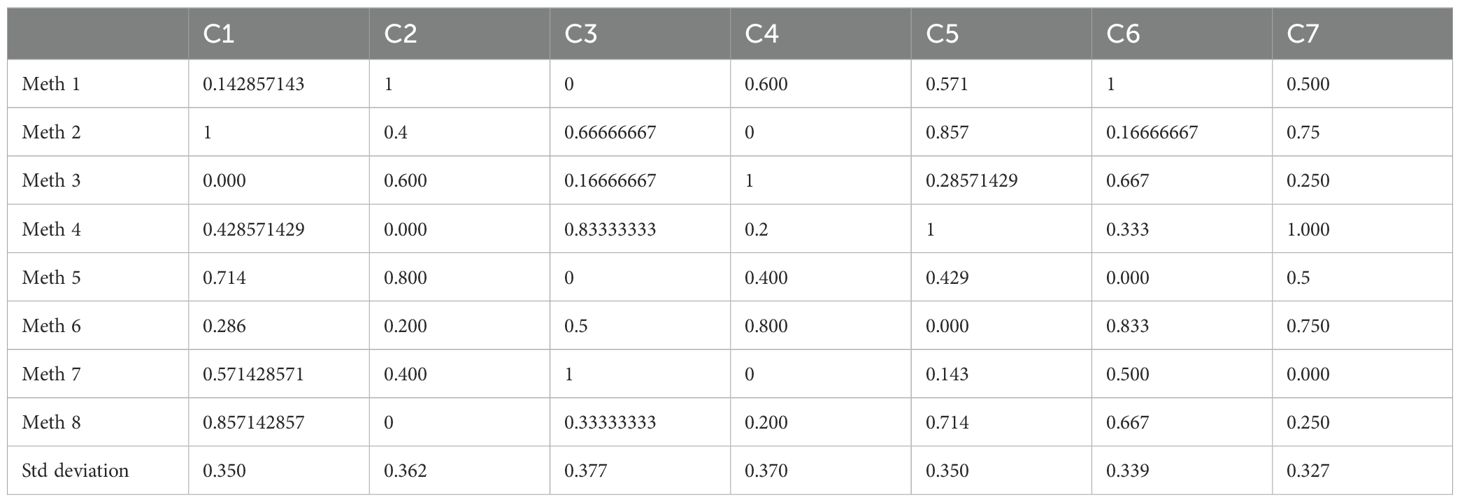
Table 6. Calculation of standard deviation.
Figure 8 plots the calculated standard deviation values for every criterion. The correlation coefficient outputs have been obtained by comparing two pairs of criteria in the normalized matrix. The required values of the correlation coefficient between pairs of criteria have been identified, as listed in Table 7 and Figure 9.
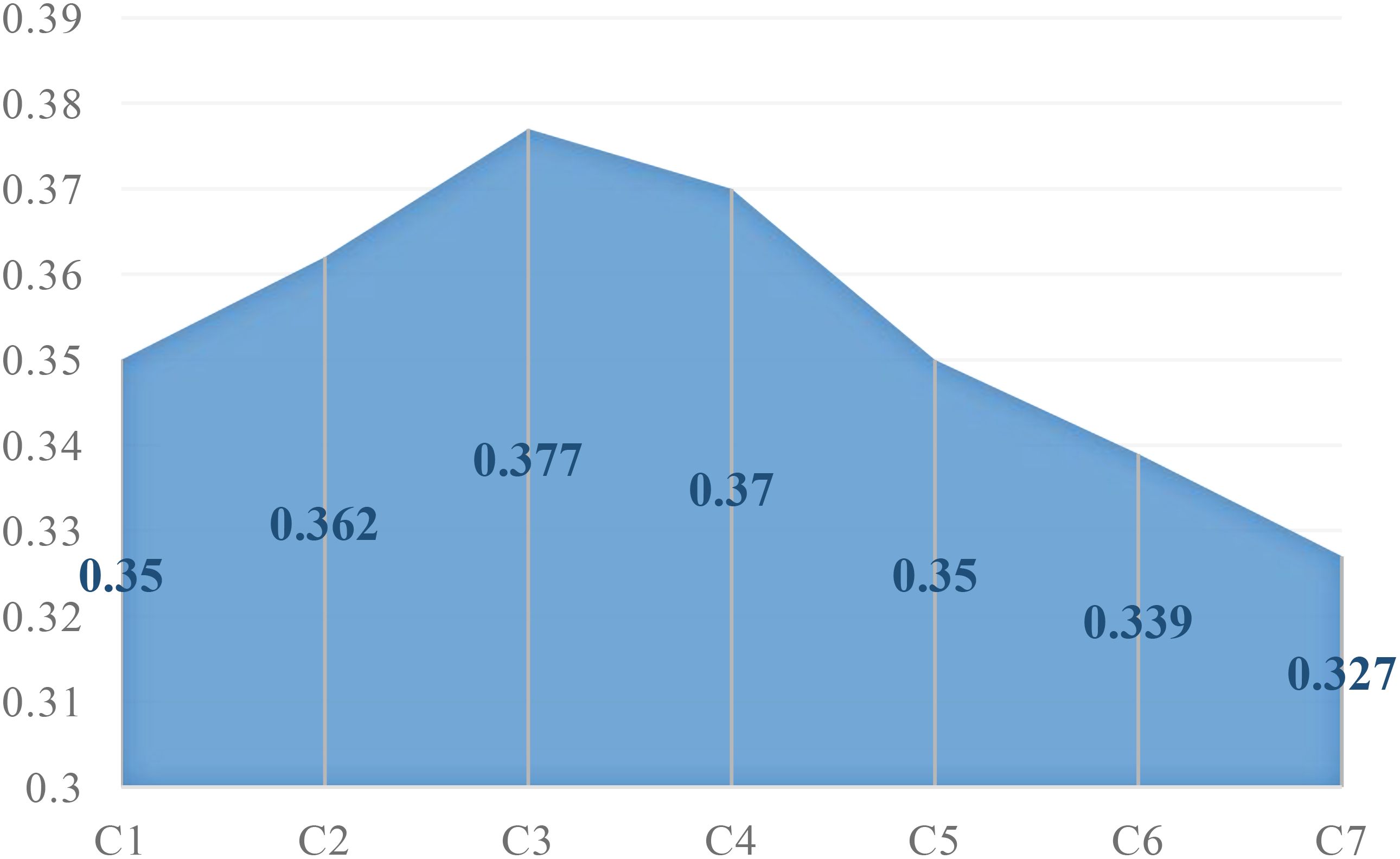
Figure 8. Standard deviation outputs.

Table 7. Calculation of correlation coefficient between criteria.
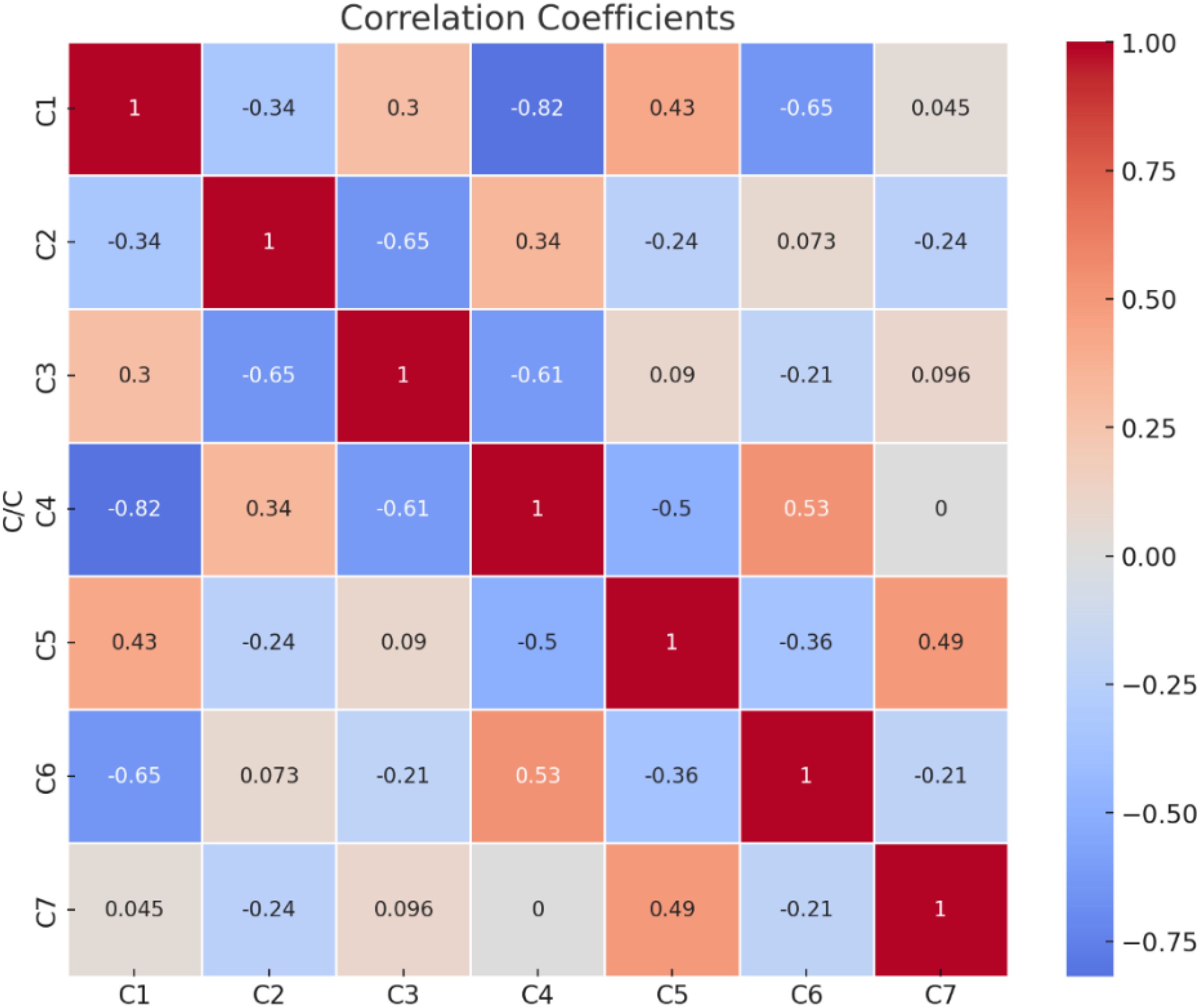
Figure 9. Correlation coefficients.
The required values have been achieved through the use of Equation 5. Every correlation coefficient value mentioned above has been subtracted from one, and then these values are added in a row-wise manner to get the required values according to the equation. The calculated outputs of the measure of conflict are outlined in Table 8.
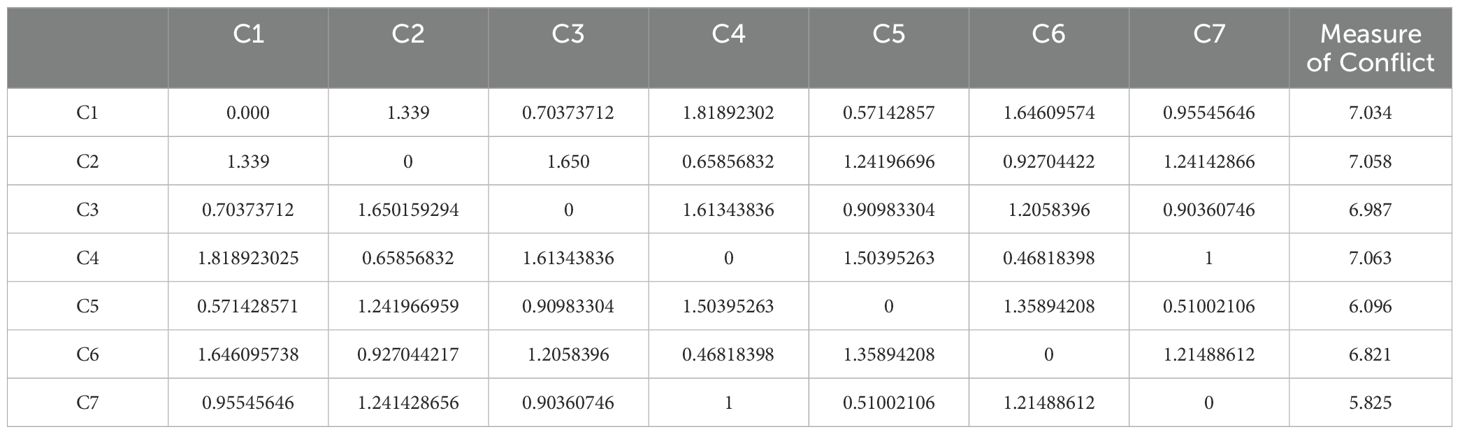
Table 8. Calculation of measure of conflict.
The calculated outcomes, known as the measure of conflict of every criterion, are plotted in Figure 10. The required outputs, known as the quantity of information, have been achieved through the application of (Equation 6). These values are obtained by multiplying the measure of conflict outputs with the standard deviation scores as per the quantity of information formula. The calculated outcomes of the quantity of information are listed in Table 9.
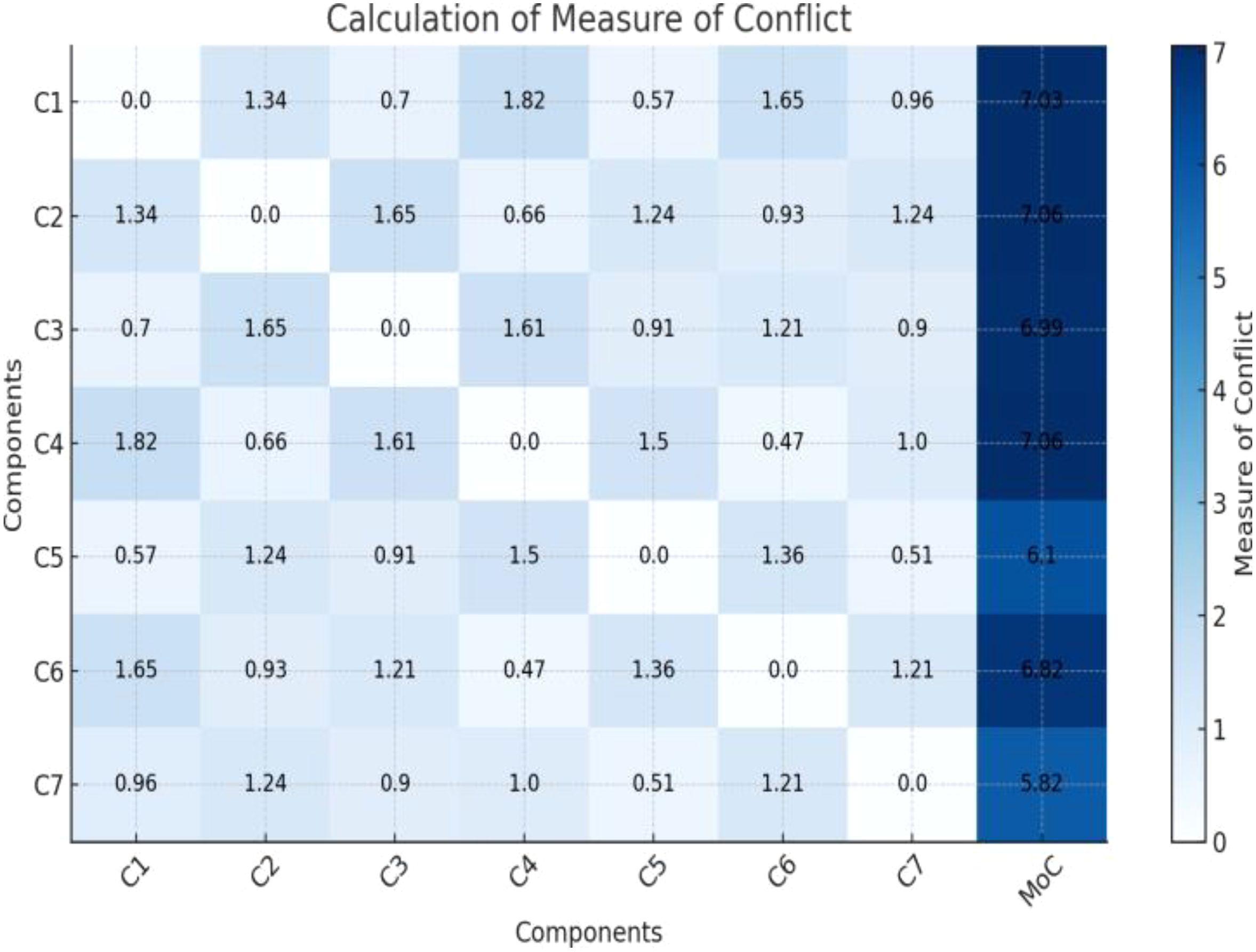
Figure 10. Measure of conflict outcomes.
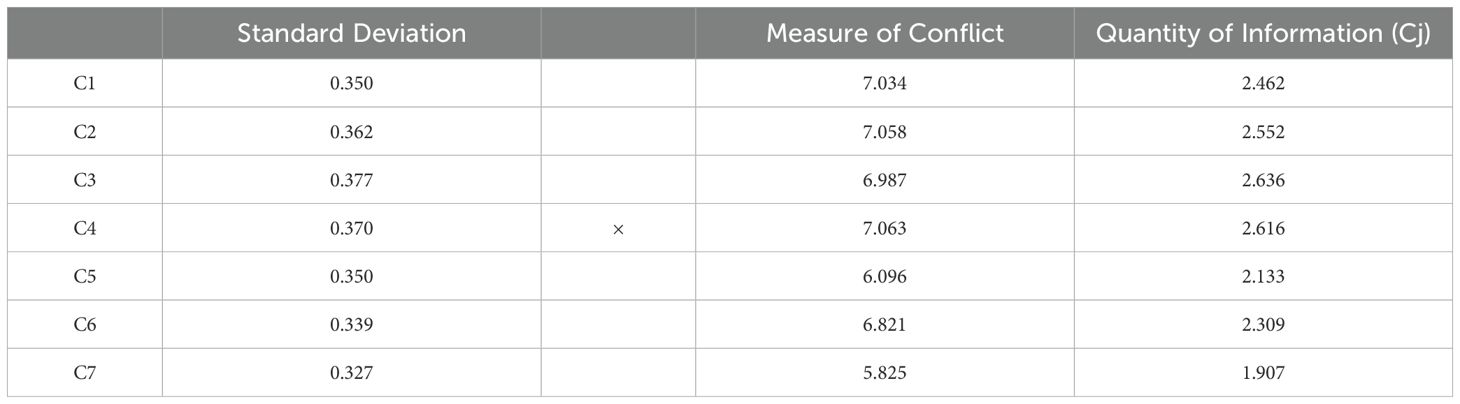
Table 9. Calculation of quantity of information.
The calculated scores of the quantity of information have been plotted in Figure 11, which improves visibility and understanding of the calculated outcomes.
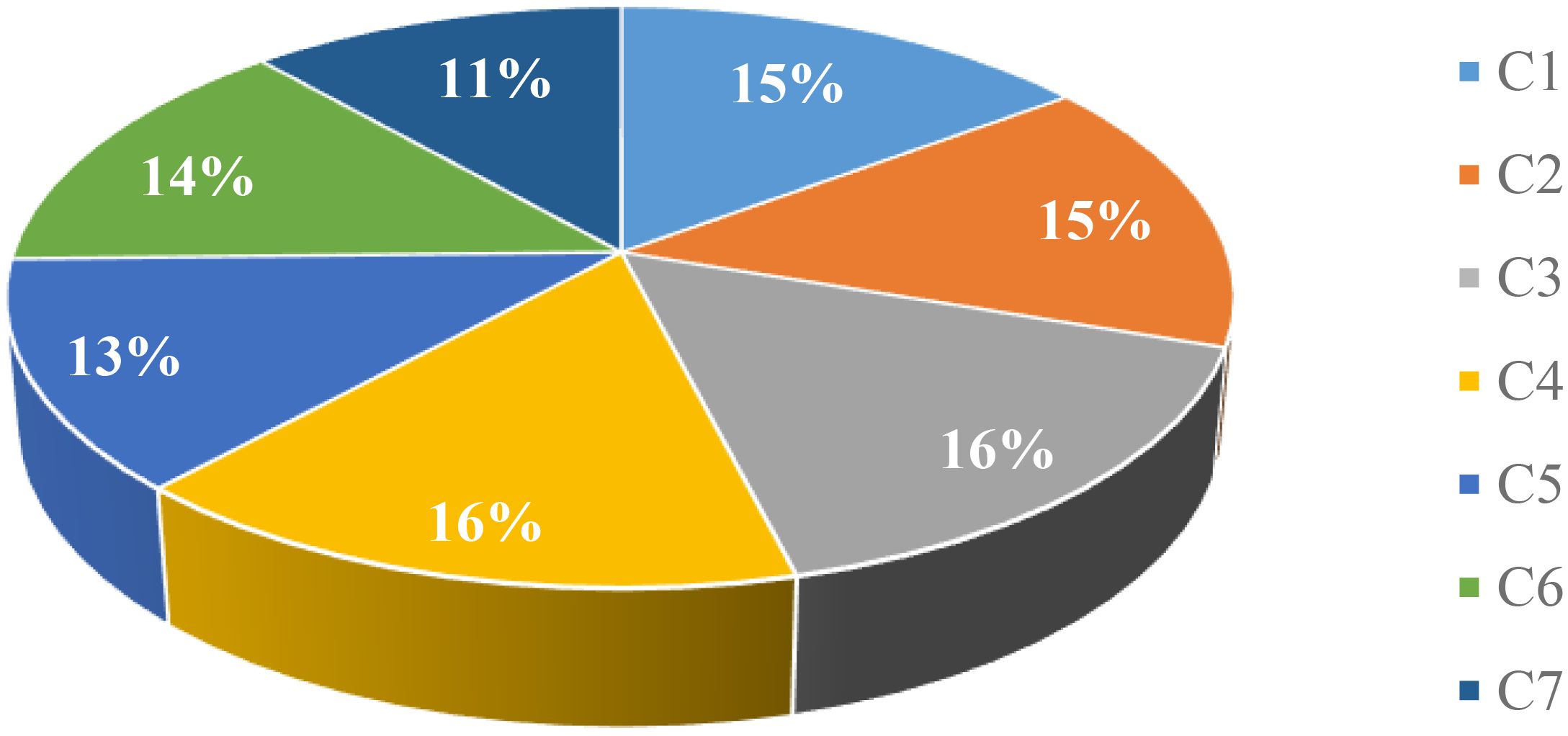
Figure 11. Quantity of information values.
According to Equation 7, every single value of the quantity of information has been divided by the total of the values of the quantity of information in order to get the required weights of every criterion to determine the relative importance of the factors and identify their effects on the numerous essential alternatives. The calculated weightage of each criterion in the study is displayed in Table 10.
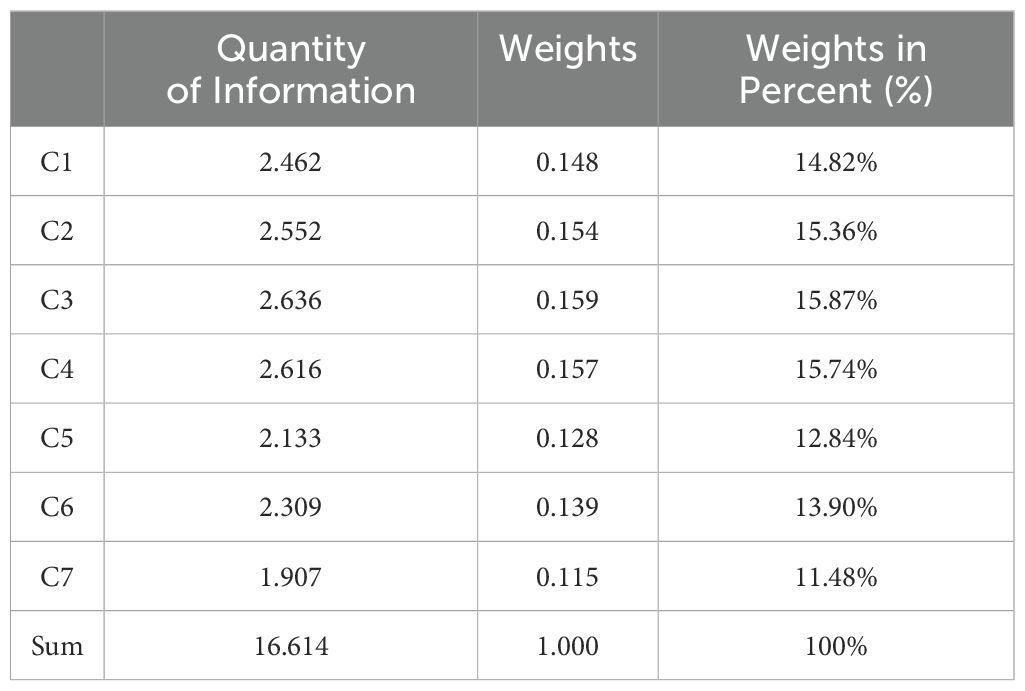
Table 10. Calculation of weights.
The weightage of each criterion calculated by the CRITIC procedure is plotted in graphical form, as shown in Figure 12 to increase the readability and clarity for the user to easily understand the relative importance of numerous essential criteria chosen and evaluated in the study. A criterion with the highest weight indicates a greater significance and high effect on the chosen alternatives, as followed by the remaining criteria in a sequence.
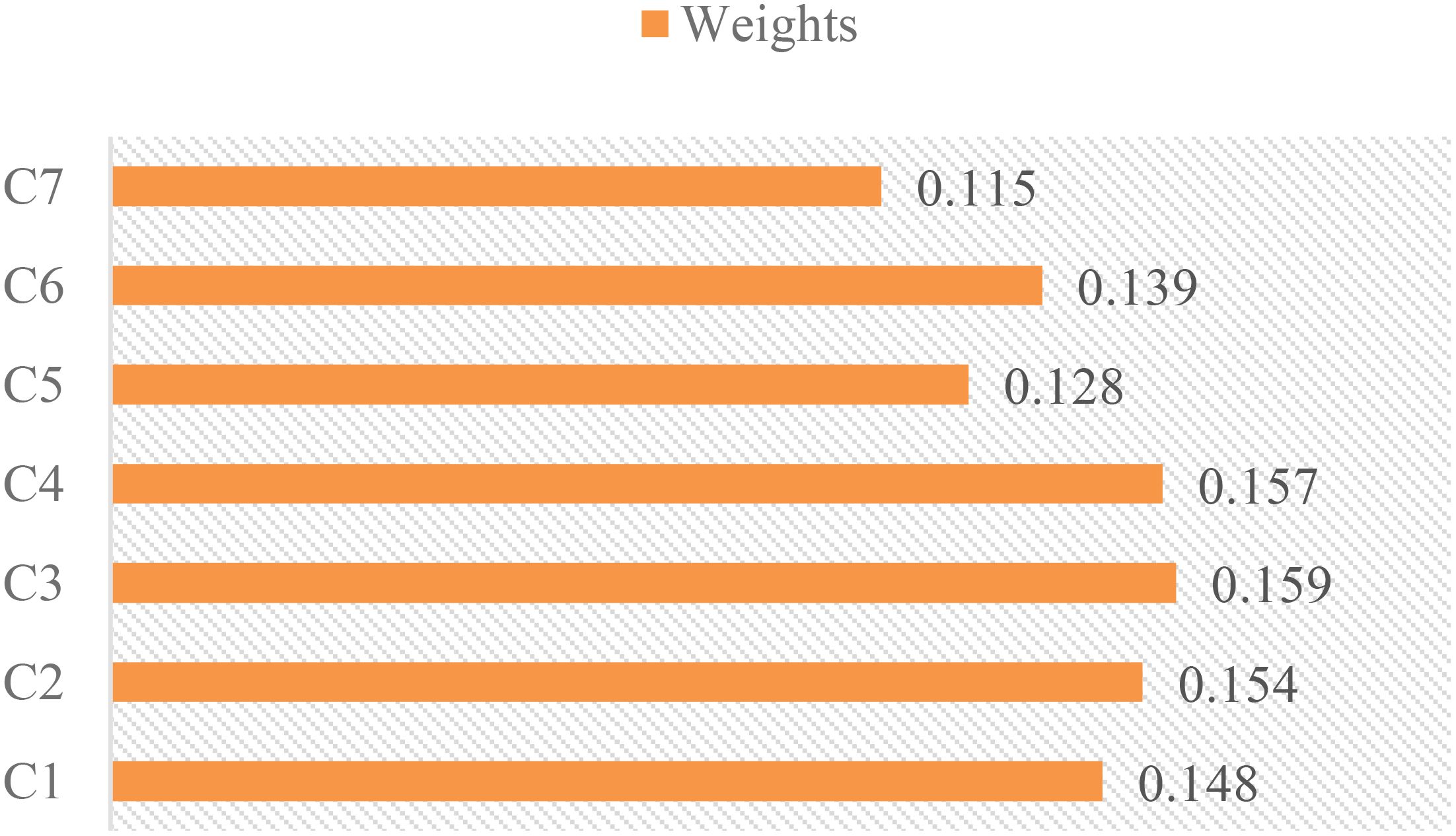
Figure 12. Illustration of criteria weights.
The CRITIC technique will prioritize the primary characteristics of submersible vehicles, enabling decision-makers to optimize vessel deployment. The appropriate vehicles will be selected, and tasks will be assigned to them, leading to higher success rates, enhanced security measures, efficient resource allocation, and improved underwater operations accuracy. The technique is valuable for investigating subsea technologies and enhancing vessel deployment in the undersea IoT.
Comparing the proposed work with previous systems shows notable differences in important performance measures, such as the distribution of trust values, the time it takes for data to go from one end to another, the lifespan of individual nodes, and the time it takes for the system to reach a stable state, see Table 11. The proposed technique showcases the most minimal end-to-end latency of 50 ms, suggesting very efficient data transfer, whereas the other alternatives display the highest delay of 65 ms. The proposed work exhibits the highest trust value distribution (0.95), indicating a greater level of reliability among network nodes. In contrast, the other approach demonstrates the lowest trust value distribution (0.85), implying inferior trust management. The suggested work has the greatest node lifespan, lasting for 200 hours, compared to the other job with a shorter node lifetime of 175 hours. This emphasizes the energy efficiency of the proposed work. In addition, the suggested work demonstrates the fastest convergence time of 30 seconds, which indicates a rapid stabilization of the network. In contrast, the comparison work has the slowest convergence time of 37 seconds, highlighting the superior performance of the proposed work. The data demonstrates that the suggested methodology surpasses other methods in all measurable dimensions, emphasizing reducing delay and maximizing trust, node lifetime, and speedy convergence.
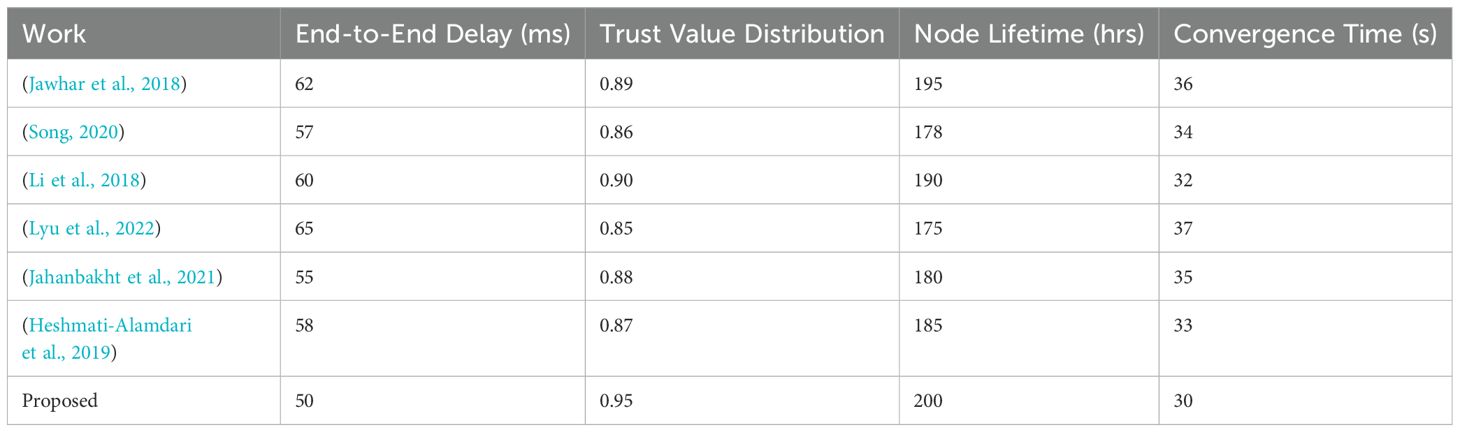
Table 11. Comparison with other approaches.
5 Conclusion
The impact of 5G and 6G communication networks on underwater technology drives rapid growth in the IoT market. As a result, underwater automobiles, vessels, tracking devices, and surveillance devices, such as s, environmental sensitivity observation equipment and advanced aquatic study instruments, have emerged. These technologies have the potential to transform our understanding of the underwater oceanic environment and contribute to the long-term management of ocean resources. The Internet of underwater vehicles is an exciting breakthrough in the IoT area that is transforming sub-aquatic operations and communications. It has energy-efficient communication modules, quick data processing, flexible sensors, remote sensing capability, and better mobility. The Internet of underwater vehicles enhances sub-aquatic vehicle communication capabilities while also accelerating job completion, resulting in a more productive, automatic, and adaptive sub-aquatic network. These advancements in technology bring up new avenues for subaquatic applications, environmental surveillance, and marine exploration. In this study, the CRITIC technique is proposed to examine and evaluate appropriate UIoT characteristics such as localization, sensing, positioning security, privacy, resource allocation, and optimization. These multi-characteristics will assist decision-makers in assessing correlations and interdependencies between various characteristics, which is critical for effective and well-informed decision-making in dynamic UIoT environments and for modifying Vehicles with multi-features to achieve specific objectives in undersea operations. Developing an integrated approach to submerged technology, ensuring the effectiveness and safety of underwater remote sensing systems, and developing energy-saving solutions to increase the lifespan of underwater vehicles are various domains that need further research and exploration to achieve the objectives of ocean and marine engineers.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material. Further inquiries can be directed to the corresponding author.
Author contributions
IU: Writing – review & editing, Writing – original draft, Validation, Software, Methodology, Conceptualization. FA: Writing – review & editing, Writing – original draft, Software, Resources, Methodology. AS: Writing – review & editing, Validation, Resources, Investigation. AA: Writing – review & editing, Resources, Investigation, Formal analysis, Data curation. HN: Writing – review & editing, Visualization, Validation, Resources, Data curation. XB: Writing – review & editing, Supervision, Resources, Project administration, Funding acquisition, Formal analysis.
Funding
The author(s) declare financial support was received for the research, authorship, and/or publication of this article. This work was supported in part by the National Natural Science Foundation of China under Grants 62373255, in part by the Natural Science Foundation of Guangdong Province under Grant 2024A1515011204, in part by the Shenzhen Natural Science Fund through the Stable Support Plan Program under Grant 20220809175803001, and in part by the Open Fund of National Engineering Laboratory for Big Data System Computing Technology under Grant SZU-BDSC-OF2024-15.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abelson A., Reed D. C., Edgar G. J., Smith C. S., Kendrick G. A., Orth R. J., et al. (2020). Challenges for restoration of coastal marine ecosystems in the anthropocene. Front. Mar. Sci. 7, 544105. doi: 10.3389/fmars.2020.544105
Akyildiz I. F., Pompili D., Melodia T. (2005). Underwater acoustic sensor networks: research challenges. Ad. Hoc. Networks 3, 257–279. doi: 10.1016/j.adhoc.2005.01.004
Arul R., Alroobaea R., Mechti S., Rubaiee S., Andejany M., Tariq U., et al. (2021). Intelligent data analytics in energy optimization for the internet of underwater things. Soft. Computing. 25, 12507–12519. doi: 10.1007/s00500-021-06002-x
Bai X., Yan W., Ge S. S., Cao M. (2018). An integrated multi-population genetic algorithm for multi-vehicle task assignment in a drift field. Inf. Sci. 453, 227–238. doi: 10.1016/j.ins.2018.04.044
Borja A., Andersen J. H., Arvanitidis C. D., Basset A., Buhl-Mortensen L., Carvalho S., et al. (2020). Past and future grand challenges in marine ecosystem ecology, Vol. vol. 7. Ed. Frontiers Media SA Frontiers in Marine Science,Switzerland, 362.
Brasier M. J., McCormack S., Bax N., Caccavo J. A., Cavan E., Ericson J. A., et al. (2020). Overcoming the obstacles faced by early career researchers in marine science: lessons from the marine ecosystem assessment for the Southern Ocean. Front. Mar. Sci. 7, 564335. doi: 10.3389/fmars.2020.00692
Cao B., Li M., Liu X., Zhao J., Cao W., Lv Z. (2021). Many-objective deployment optimization for a drone-assisted camera network. IEEE Trans. Network. Sci. Eng. 8, 2756–2764. doi: 10.1109/TNSE.2021.3057915
Cao X., Ren L., Sun C. (2022). Dynamic target tracking control of autonomous underwater vehicle based on trajectory prediction. IEEE Trans. Cybernetics. 53, 1968–1981. doi: 10.1109/TCYB.2022.3189688
Chen B., Hu J., Zhao Y., Ghosh B. K. (2022). Finite-time observer based tracking control of uncertain heterogeneous underwater vehicles using adaptive sliding mode approach. Neurocomputing 481, 322–332. doi: 10.1016/j.neucom.2022.01.038
De Wit C. C., Diaz O. O., Perrier M. (2000). Nonlinear control of an underwater vehicle/manipulator with composite dynamics. IEEE Trans. Control. Syst. Technol. 8, 948–960. doi: 10.1109/87.880599
Domingo M. C. (2012). An overview of the internet of underwater things. J. Network. Comput. Appl. 35, 1879–1890. doi: 10.1016/j.jnca.2012.07.012
Duan R., Du J., Jiang C., Ren Y. (2020). Value-based hierarchical information collection for AUV-enabled Internet of Underwater Things. IEEE Internet Things. J. 7, 9870–9883. doi: 10.1109/JIoT.6488907
Fang Z., Wang J., Du J., Hou X., Ren Y., Han Z. (2021). Stochastic optimization-aided energy-efficient information collection in internet of underwater things networks. IEEE Internet Things. J. 9, 1775–1789. doi: 10.1109/JIOT.2021.3088279
Farr N., Bowen A., Ware J., Pontbriand C., Tivey M. (2010). “An integrated, underwater optical/acoustic communications system,” in OCEANS’10 IEEE SYDNEY, Sydney, NSW, Australia, 2010, pp. 1–6.
Frampton K. D. (2006). Acoustic self-localization in a distributed sensor network. IEEE Sensors. J. 6, 166–172. doi: 10.1109/JSEN.2005.860361
Garcia M., Sendra S., Lloret G., Lloret J. (2011). Monitoring and control sensor system for fish feeding in marine fish farms. IET. Commun. 5, 1682–1690. doi: 10.1049/iet-com.2010.0654
Gu Y., Hu Z., Zhao Y., Liao J., Zhang W. (2024). MFGTN: A multi-modal fast gated transformer for identifying single trawl marine fishing vessel. Ocean. Eng. 303, 117711. doi: 10.1016/j.oceaneng.2024.117711
Hao Y., Li X., Chen B., Zhu Z. (2022). Marine monitoring based on triboelectric nanogenerator: Ocean energy harvesting and sensing. Front. Mar. Sci. 9, 1038035. doi: 10.3389/fmars.2022.1038035
He S., Kou L., Li Y., Xiang J. (2022). Position tracking control of fully-actuated underwater vehicles with constrained attitude and velocities. IEEE Trans. Ind. Electron. 69, 13192–13202. doi: 10.1109/TIE.2022.3140516
Heshmati-Alamdari S., Karras G. C., Marantos P., Kyriakopoulos K. J. (2019). A robust predictive control approach for underwater robotic vehicles. IEEE Trans. Control. Syst. Technol. 28, 2352–2363. doi: 10.1109/TCST.87
Hoeher P. A., Sticklus J., Harlakin A. (2021). Underwater optical wireless communications in swarm robotics: A tutorial. IEEE Commun. Surveys. Tutorials. 23, 2630–2659. doi: 10.1109/COMST.2021.3111984
Jahanbakht M., Xiang W., Hanzo L., Azghadi M. R. (2021). Internet of underwater things and big marine data analytics—a comprehensive survey. IEEE Commun. Surveys. Tutorials. 23, 904–956. doi: 10.1109/COMST.2021.3053118
Jawhar I., Mohamed N., Al-Jaroodi J., Zhang S. (2018). An architecture for using autonomous underwater vehicles in wireless sensor networks for underwater pipeline monitoring. IEEE Trans. Ind. Inf. 15, 1329–1340. doi: 10.1109/TII.2018.2848290
Jiang S. (2018). On reliable data transfer in underwater acoustic networks: A survey from networking perspective. IEEE Commun. Surveys. Tutorials. 20, 1036–1055. doi: 10.1109/COMST.2018.2793964
Khalil R. A., Saeed N., Babar M. I., Jan T. (2020). Toward the internet of underwater things: Recent developments and future challenges. IEEE Consumer. Electron. Magazine. 10, 32–37. doi: 10.1109/MCE.2020.2988441
Khan S., Ullah I., Ali F., Shafiq M., Ghadi Y. Y., Kim T. (2023). Deep learning-based marine big data fusion for ocean environment monitoring: Towards shape optimization and salient objects detection. Front. Mar. Sci. 9, 1094915. doi: 10.3389/fmars.2022.1094915
Li J., Zhang G., Jiang C., Zhang W. (2023). A survey of maritime unmanned search system: Theory, applications and future directions. Ocean. Eng. 285, 115359. doi: 10.1016/j.oceaneng.2023.115359
Li Q., Ben Y., Naqvi S. M., Neasham J. A., Chambers J. A. (2018). Robust student’s $ t $-based cooperative navigation for autonomous underwater vehicles. IEEE Trans. Instrumentation. Measurement. 67, 1762–1777. doi: 10.1109/TIM.2018.2809139
Lloret J., Sendra S., Garcia M., Lloret G. (2011). “Group-based underwater wireless sensor network for marine fish farms,” in 2011 IEEE globecom Workshops (GC Wkshps), Houston, TX, USA, 2011, pp. 115–119.
Luo J., Chen Y., Wu M., Yang Y. (2021). A survey of routing protocols for underwater wireless sensor networks. IEEE Commun. Surveys. Tutorials. 23, 137–160. doi: 10.1109/COMST.9739
Luo H., Wu K., Ruby R., Liang Y., Guo Z., Ni L. M. (2018). Software-defined architectures and technologies for underwater wireless sensor networks: A survey. IEEE Commun. Surveys. Tutorials. 20, 2855–2888. doi: 10.1109/COMST.9739
Lyu C., Lu D., Xiong C., Hu R., Jin Y., Wang J., et al. (2022). Toward a gliding hybrid aerial underwater vehicle: Design, fabrication, and experiments. J. Field Robotics. 39, 543–556. doi: 10.1002/rob.22063
Mariani P., Bachmayer R., Kosta S., Pietrosemoli E., Ardelan M. V., Connelly D. P., et al. (2021). Collaborative automation and IoT technologies for coastal ocean observing systems. Front. Mar. Sci. 8, 647368. doi: 10.3389/fmars.2021.647368
Moradi M., Rezazadeh J., Ismail A. S. (2012). A reverse localization scheme for underwater acoustic sensor networks. Sensors 12, 4352–4380. doi: 10.3390/s120404352
Refulio-Coronado S., Lacasse K., Dalton T., Humphries A., Basu S., Uchida H., et al. (2021). Coastal and marine socio-ecological systems: A systematic review of the literature. Front. Mar. Sci. 8, 648006. doi: 10.3389/fmars.2021.648006
Rolland E. S., Haji M. N., de Weck O. L. (2023). Autonomous control of a prototype solar-powered offshore autonomous underwater vehicle servicing platform via a low-cost embedded architecture. J. Field Robotics. 40, 828–847. doi: 10.1002/rob.22155
Rymansaib Z., Thomas B., Treloar A. A., Metcalfe B., Wilson P., Hunter A. (2023). A prototype autonomous robot for underwater crime scene investigation and emergency response. J. Field Robotics. 40, 983–1002. doi: 10.1002/rob.22164
Sendra S., Lloret J., Jimenez J. M., Parra L. (2015). Underwater acoustic modems. IEEE Sensors. J. 16, 4063–4071. doi: 10.1109/JSEN.2015.2434890
Song Y. (2020). Underwater acoustic sensor networks with cost efficiency for internet of underwater things. IEEE Trans. Ind. Electron. 68, 1707–1716. doi: 10.1109/TIE.41
Sozer E. M., Stojanovic M., Proakis J. G. (2000). Underwater acoustic networks. IEEE J. Oceanic. Eng. 25, 72–83. doi: 10.1109/48.820738
Sun P., Boukerche A. (2018). Modeling and analysis of coverage degree and target detection for autonomous underwater vehicle-based system. IEEE Trans. Vehicular. Technol. 67, 9959–9971. doi: 10.1109/TVT.2018.2864141
Tian W., Zhao Y., Hou R., Dong M., Ota K., Zeng D., et al. (2023). A centralized control-based clustering scheme for energy efficiency in underwater acoustic sensor networks. IEEE Trans. Green Commun. Networking. 7, 668–679. doi: 10.1109/TGCN.2023.3249208
Vasilijević A., Nađ Đ., Mandić F., Mišković N., Vukić Z. (2017). Coordinated navigation of surface and underwater marine robotic vehicles for ocean sampling and environmental monitoring. IEEE/ASME. Trans. Mechatronics. 22, 1174–1184. doi: 10.1109/TMECH.2017.2684423
Wang H., Yang Y., Ye X., He Z., Jiao P. (2023). Combustion-enabled underwater vehicles (CUVs) in dynamic fluid environment. J. Field Robotics. 40, 1054–1068. doi: 10.1002/rob.22167
Wei X., Guo H., Wang X., Wang X., Qiu M. (2021). Reliable data collection techniques in underwater wireless sensor networks: A survey. IEEE Commun. Surveys. Tutorials. 24, 404–431. doi: 10.1109/COMST.2021.3134955
Yan W., Bai X., Peng X., Zuo L., Dai J. (2014). “The routing problem of autonomous underwater vehicles in ocean currents,” in OCEANS 2014-TAIPEI, Taipei, Taiwan, 2014, pp. 1–6.
Yan J., Gao J., Yang X., Luo X., Guan X. (2019). Position tracking control of remotely operated underwater vehicles with communication delay. IEEE Trans. Control. Syst. Technol. 28, 2506–2514. doi: 10.1109/TCST.87
Yang J., Huo J., Xi M., He J., Li Z., Song H. H. (2022). A time-saving path planning scheme for autonomous underwater vehicles with complex underwater conditions. IEEE Internet Things. J. 10, 1001–1013. doi: 10.1109/JIOT.2022.3205685
Yang Y., Xiao Y., Li T. (2021). A survey of autonomous underwater vehicle formation: Performance, formation control, and communication capability. IEEE Commun. Surveys. Tutorials. 23, 815–841. doi: 10.1109/COMST.2021.3059998
Zacchini L., Franchi M., Ridolfi A. (2022). Sensor-driven autonomous underwater inspections: A receding-horizon RRT-based view planning solution for AUVs. J. Field Robotics. 39, 499–527. doi: 10.1002/rob.22061
Zhou C., Liu M., Zhang S., Zheng R., Dong S., Liu Z. (2023). Asynchronous localization for underwater acoustic sensor networks: A continuous control deep reinforcement learning approach. IEEE Internet Things. J. 11, 9505–9521. doi: 10.1109/JIOT.2023.3324392
Keywords: autonomous underwater vehicles, remote sensing, internet of underwater things, acoustics sensor networks, marine applications
Citation: Ullah I, Ali F, Sharafian A, Ali A, Naeem HMY and Bai X (2024) Optimizing underwater connectivity through multi-attribute decision-making for underwater IoT deployments using remote sensing technologies. Front. Mar. Sci. 11:1468481. doi: 10.3389/fmars.2024.1468481
Received: 22 July 2024; Accepted: 30 August 2024;
Published: 19 September 2024.
Edited by:
Chao Chen, Suzhou University of Science and Technology, ChinaReviewed by:
Prince Waqas Khan, West Virginia University, United StatesChunjiong Zhang, Ajou University, Republic of Korea
Abdur Rasool, Chinese Academy of Sciences (CAS), China
Copyright © 2024 Ullah, Ali, Sharafian, Ali, Naeem and Bai. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Xiaoshan Bai, YmFpeGlhb3NoYW5Ac3p1LmVkdS5jbg==