 Zhe Chen
Zhe Chen Jianxun Tang
Jianxun Tang Hongbin Qiu1,2
Hongbin Qiu1,2
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Mar. Sci. , 12 December 2023
Sec. Ocean Observation
Volume 10 - 2023 | https://doi.org/10.3389/fmars.2023.1306229
This article is part of the Research Topic Ocean Observation based on Underwater Acoustic Technology, volume II View all 23 articles
The recognition of underwater acoustic targets plays a crucial role in marine vessel monitoring. However, traditional underwater target recognition models suffer from limitations, including low recognition accuracy and slow prediction speed. To address these challenges, this article introduces a novel approach called the Multi-Gradient Flow Global Feature Enhancement Network (MGFGNet) for automatic recognition of underwater acoustic targets. Firstly, a new spectrogram feature fusion scheme is presented, effectively capturing both the physical and brain-inspired features of the acoustic signal. This fusion technique enhances the representation of underwater acoustic data, resulting in more accurate recognition results. Moreover, MGFGNet utilizes the multi-gradient flow network and incorporates a multi-dimensional feature enhancement technique to achieve fast and precise end-to-end recognition. Finally, a loss function is introduced to mitigate the influence of unbalanced data sets on model recognition performance using Taylor series. This further enhances model recognition performance. Experimental evaluations were conducted on the DeepShip dataset to assess the performance of our proposed method. The results demonstrate the superiority of MGFGNet, achieving a recognition rate of 99.1%, which significantly surpasses conventional methods. Furthermore, MGFGNet exhibits improved efficiency compared to the widely used ResNet18 model, reducing the parameter count by 51.28% and enhancing prediction speed by 33.9%. Additionally, we evaluated the generalization capability of our model using the ShipsEar dataset, where MGFGNet achieves a recognition rate of 99.5%, indicating its superior performance when applied to unbalanced data. The promising results obtained in this study highlight the potential of MGFGNet in practical applications.
With the development of artificial intelligence, there is an increasing focus on utilizing AI-based methods to address research challenges in aquaculture. Fisheries and aquaculture constitute a global industry valued at $200 billion (Gladju et al., 2022). As this industry continues to expand, traditional processes involving essential technologies such as aquaculture environment monitoring, feeding, and fish behavior surveillance (Wu et al., 2022) incur significant costs. Hence, the urgent need arises to employ artificial intelligence technologies to enhance the economic, social, and environmental sustainability of the fish supply chain (Lim, 2022). AI-based aquaculture technologies primarily encompass environmental monitoring, intelligent feeding, biological behavior monitoring, and fishing vessel motion tracking (Setiyowati et al., 2022).
Environmental monitoring relies on water quality management systems to control the health of aquaculture water, preventing widespread diseases or issues such as slow growth in fish fry due to water quality problems (Hu et al., 2022). Koparan et al. (2018) developed an intelligent unmanned aerial vehicle to continuously monitor the water quality of a 1.1-hectare pond through intelligent sampling and analysis. Given that feed costs constitute over 60% of aquaculture expenses (Boyd et al., 2022), effective control of feed distribution is crucial. Lim and Whye, (2023) proposed a system that monitors fish behavior by detecting water wave vibrations caused by competitive feeding, thereby assessing fish hunger levels and significantly reducing feed consumption.
Biological behavior monitoring encompasses various aspects. Ahmed et al. (2022) and Darapaneni et al. (2022) employed computer vision and underwater optical imaging techniques, respectively, to obtain underwater images of fish activities for disease detection and prevention before widespread mortality. Fishing activities require strict control over timing and quantity globally. Bradley et al. (2019) and Kritzer, (2020) integrated automatic identification with artificial intelligence technology, utilizing underwater acoustic target recognition systems to track fishing vessel movements in real-time and predict their fishing activities, ensuring legitimacy.
In summary, due to the rapid development of computer vision technology effectively addressing the first three issues in aquaculture, our research focus shifts towards utilizing underwater acoustic target recognition technology for vessel motion monitoring.
Underwater acoustic target recognition involves collecting target radiated noise using hydrophones, analyzing and processing the data to discern target types (Ma et al., 2022). It holds significant importance in maritime vessel monitoring and underwater vehicle detection. Acoustic target recognition models typically consist of two modules: feature extraction and feature classification (Hong et al., 2021), and research in this field revolves around these modules.
Traditional methods of underwater acoustic target feature extraction can be categorized into signal physics-based and brain-like computing methods (Zhu et al., 2023). Signal physics-based methods rely on basic characteristics, temporal features, and non-Gaussian characteristics of underwater acoustic signals (Yao X. et al., 2023). This includes time-domain features like zero-crossing distribution, frequency-domain features like cepstral analysis (Zhu et al., 2022), and joint time-frequency domain features such as wavelet transforms (Han et al., 2022; Liu et al., 2022; Tian et al., 2023). Brain-like computing features for underwater acoustic signals include Mel-frequency cepstral coefficients (MFCC) simulating nonlinear processing of the human ear (Di et al., 2023) and Gammatone filtering simulating peripheral auditory processing (Zhou et al., 2022). Traditional classifier models include case-based reasoning (Ali et al., 2018) and perceptron neural networks (Linka and Kuhl, 2023). While traditional methods provide explicit directional analysis based on the physical meaning of underwater acoustic signals, they depend on prior knowledge and exhibit poor model generalization (Xiao et al., 2021).
Deep learning models, including Convolutional Neural Networks (CNN) (Yao Q. et al., 2023), provide new solutions for underwater acoustic target recognition (Jin and Zeng, 2023). Wang and Zeng (2015). demonstrated the feasibility of CNN models in underwater acoustic target recognition by testing them on three different measured acoustic targets. Studies have validated the applicability of deep learning in feature extraction. Huang et al. (2021) used autoassociative neural networks (AANN) to directly process mixed time-domain information of raw acoustic data without prior information, filtering ocean background noise, and obtaining effective spectral features of underwater acoustic targets. Additionally, research on deep learning-based classifiers is active. Li J. et al. (2022) designed AResNet to enhance feature extraction capability by increasing the width of the ResNet (He et al., 2016) residual network and incorporating channel attention mechanisms. Yang S. et al. (2023) developed LW-SEResNet10 to improve target recognition accuracy by reducing the number of ResNet residual structures and adding attention mechanisms. These classifiers operate similarly, performing feature extraction first and then inputting the features to obtain classification results.
Despite the advantages of existing deep learning-based underwater acoustic target recognition models in addressing some shortcomings of traditional methods, several challenges persist:
1. Existing models have independent feature extraction and classifiers (Zhufeng et al., 2022), failing to meet end-to-end underwater acoustic target recognition requirements.
2. Current feature extraction methods primarily use two-dimensional feature methods based on signal physics or brain-like computing features or their fusion methods (Li J. et al., 2022; Yang S. et al., 2023), overlooking the high-dimensional features of underwater acoustic data, resulting in insufficient representation capabilities of fused features.
3. Current classifiers mainly enhance feature extraction capabilities by stacking convolutional layers (Ji et al., 2023). However, due to the mixture of ocean environmental noise and partial information of underwater acoustic target features (Xu et al., 2019), standard convolutional operations tend to lose some effective features of underwater acoustic targets and erroneously retain ocean environmental noise (Li J. et al., 2022), reducing the capability to extract effective features in underwater acoustic target recognition models. Thus, the model’s parameter quantity and its recognition performance cannot achieve an effective balance, failing to meet the requirements of fast recognition speed and high accuracy in underwater acoustic target recognition.
4. As underwater acoustic data collection requires substantial financial and labor support, most existing publicly available underwater acoustic datasets exhibit imbalances in sample quantities across categories (Zhou et al., 2021). When training deep learning-based target recognition models, this can lead to overfitting phenomena (Li B. et al., 2022), suppressing model recognition performance.
To address these issues, we propose a novel underwater acoustic target automatic recognition network model based on a multi-gradient flow global feature enhancement network, referred to as MGFGNet.
Contributions of this work include:
1. Introducing a high-dimensional feature fusion method based on signal analysis and brain-like features.
2. Proposing a multi-gradient network to reduce model parameters and enhance feature extraction capabilities.
3. Presenting an adaptive feature fusion and enhancement module to enrich the physical, channel, and contextual information of pre-existing features.
4. Inventing a loss function, adding only three hyperparameters, and transforming the multi-classification task into multiple binary classification tasks, significantly improving the model’s ability to suppress sample imbalances and recognition accuracy.
The following outlines the general structural framework of the remaining content in this article. Section 2 provides a detailed exposition of the Ship Radiated Noise Classification Method, known as MGFGNet. In Section 3, qualitative and quantitative experiments are conducted to compare MGFGNet with existing advanced underwater acoustic target recognition models, followed by an analysis of the experimental findings. Finally, Section 4 serves as the conclusion of this article.
This section primarily delineates MGFGNet. Section 2.1 provides an overview of its architectural framework. Sections 2.2 through 2.5 subsequently delve into its Feature Extraction and Fusion Module (FEFM), the Multi-gradient Flow Block with Attention (Multi-grad Block), the Context Augmentation and Fusion Module (CAFM), and the dynamic classification loss function known as Taylor-MCE Loss.
MGFGNet comprises two core modules: FEFM and the MGFGNet classifier. Figure 1 illustrates its detailed architecture.
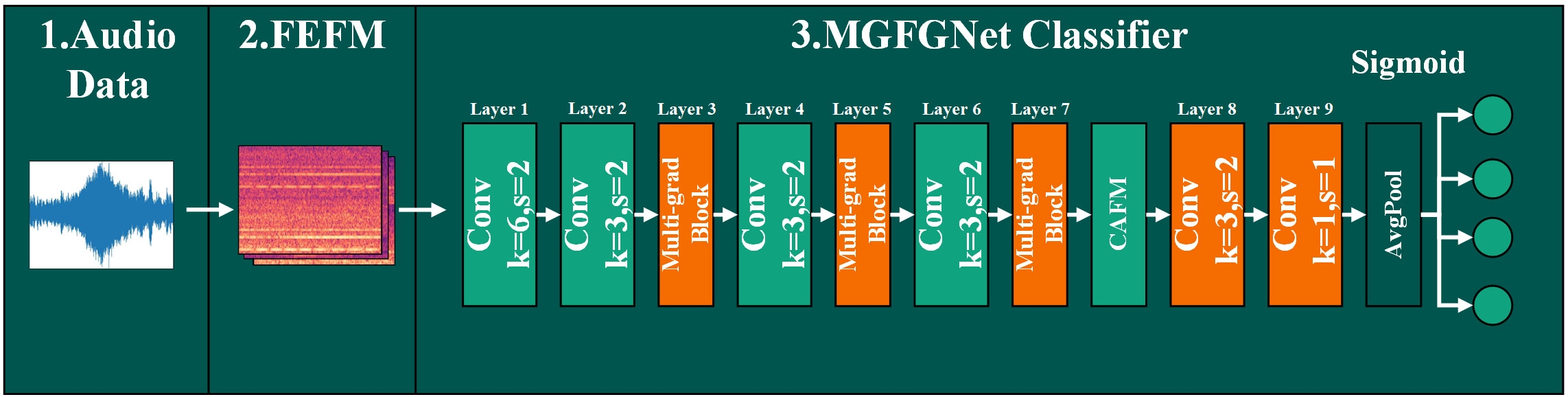
Figure 1 MGFGNet model architecture.
FEFM utilizes various feature extraction algorithms based on signal analysis and brain-like features to extract multidimensional features from vessel radiated noise signals. Subsequently, multiple three-dimensional features are fused using the proposed feature fusion method to form high-dimensional fused features, which serve as inputs to the MGFGNet network.
The MGFGNet classifier primarily consists of the Multi-grad Block module and the CAFM module. The Multi-grad Block utilizes a multi-gradient flow network and residual modules to rapidly extract deep abstract features with different receptive fields from underwater acoustic target signals while reducing model parameters. Simultaneously, it leverages the multi-head self-attention mechanism (MHSA) (Han et al., 2021) to enhance the model’s focus on foreground information, aiming to preserve the spatiotemporal characteristics of target line spectra in the acoustic energy spectrogram. This enhances the model’s ability to extract effective information from sonar signals.
The CAFM module uses dilated convolutions with different dilation rates to adaptively fuse and enhance contextual information with a broad range of receptive fields, enriching the feature representation of physical, channel, and contextual information extracted by the preceding module. Finally, the Taylor-MCE Loss is employed to calculate prediction loss, addressing the issue of suppressing model recognition performance on imbalanced datasets. The Taylor-MCE Loss incorporates Taylor series (Gonzalez and Miikkulainen, 2021) into binary cross-entropy loss (BCE) (Ruby and Yendapalli, 2020), including two components: one suppresses imbalances in sample components, and the other is a low-order term of the perturbation factor aimed at enhancing model recognition accuracy. Additionally, it transforms the multi-class classification task into multiple independent binary classification tasks.
Although deep learning-based feature extraction methods can capture more profound abstract features compared to traditional signal processing methods, they also come with a substantial increase in computational costs (Aggarwal et al., 2022). Vessel radiated noise primarily consists of mechanical noise, hydrodynamic noise, and propeller noise (Yang et al., 2019). Additionally, different feature extraction methods express distinct signal characteristics, and using multiple features for fusion can yield improved recognition results (Li Y. et al., 2022). Therefore, this paper, based on the generation mechanism of ship radiated noise, employs a fusion feature extraction method grounded in signal physical characteristics and brain-like features to represent underwater acoustic signals in multiple dimensions.
The fusion features in this paper mainly comprise energy-enhanced features from three types of features: CQT (Singh et al., 2022), delta MFCC (Nouhaila et al., 2022), and double delta MFCC (Nouhaila et al., 2022).
Firstly, since vessel radiated noise carries a significant amount of valid information in the low-frequency subband (Zhang et al., 2023), CQT provides better frequency resolution in the low-frequency subband (Mateo and Talavera, 2020). Hence, CQT is utilized as one of the feature extraction methods.
Secondly, MFCC, as a static feature, can not only eliminate ocean background noise but also effectively represent the spectral information of underwater acoustic targets. However, it lacks dynamic temporal signal features (Yang S. et al., 2023). To introduce temporal dynamic information, this paper performs local estimation of the differential operation along the time axis for the MFCC feature, obtaining delta MFCC and double-delta MFCC features. Both of these feature extraction methods are incorporated into the extraction of underwater acoustic target features.
Furthermore, as the single-channel feature information (graphically represented as a grayscale image) formed by these feature extraction methods can only express three-dimensional information of underwater sound, such as time, frequency, and energy domains, this paper expands the single-channel energy domain digital features of the above feature extraction methods into three-channel energy domain features using a color space representation. The detailed expansion method is described as follows.
Finally, this feature extraction and fusion module are embedded in the front end of the target recognition network, significantly reducing the computational burden of the classifier while achieving end-to-end target recognition.
Figure 2 illustrates our raised feature extraction method. Its process consists of four main parts:

Figure 2 Feature extraction process for fused features.
1. In the first step, CQT features and MFCC features are extracted.
In the feature extraction process, the frame length is 2048 and the frame overlap is the portion between two frames of size 75% of the frame length, then using a Hanning window with a window size equal to the frame length for each frame signal.
The CQT transform of a finite length sequence x(n) is
where is a Hanning window of length Nk; Q is a constant factor in the CQT; k is the CQT frequency number, and the value of Nk is related to the value of k.
where b is the number of frequency spectral lines, the
where CQT information are stored in a matrix XCQT (k,n), fmin = 1, fs = 22050. Since the sampling rate of the raw underwater acoustic data is 22050Hz for 5s, the shape of the CQT is 128×216.
In the feature extraction process, the frame length and frame overlap are set to be the same as in the CQT extraction process. A Hanning window with a window size equal to the frame length is then used for each frame. The short-time Fourier transform is then used to filter the noise and the sum of squares is used to obtain the power spectrum. Then 128 Mel filter banks were used to filter the information of each frame and logarithm was obtained to obtain Mel spectrum. Finally, MFCC was obtained by logarithm fitting the Mel spectrum to human hearing and discrete cosine transform (DCT). Since the sampling rate of the raw underwater acoustic data is a 5s signal at 22050Hz, the shape of the MFCC is 128×216.
2. The second step focuses on the extraction of delta MFCC and double-delta MFCC features by adding delta features and double-delta features to the MFCC features.
3. The third step focuses on transforming the above three features into spectrograms based on the size of 512, 12 and 0 for Hop length, bins per octave and tuning, respectively, with a preset image size of 3 × 640 × 480 for per image. Figure 3 illustrates the time-domain waveform diagram of radiated noise of a ship in the Deepship (Irfan et al., 2021) dataset and the spectrum diagram of CQT, delta MFCC and double-delta MFCC.
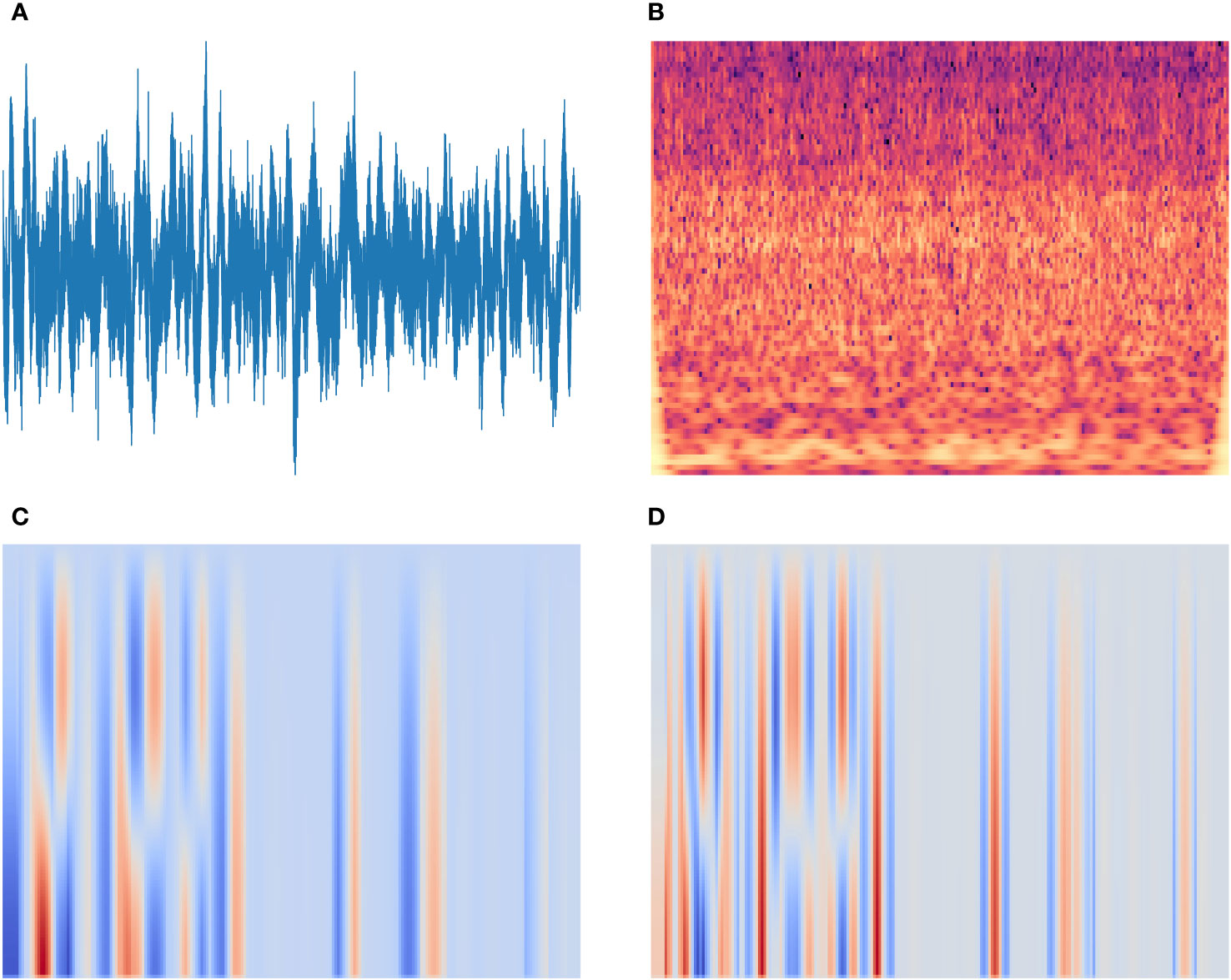
Figure 3 Spectrogram feature plots of radiated noise from a ship in the Deepship database: (A) Time-domain waveform; (B) CQT; (C) Delta MFCC; (D) Double-delta MFCC.
4. In the fourth step, the spectral graphs of CQT, delta MFCC and double-delta MFCC are fused respectively in channel dimension. The detailed fusion process is as follows.
as a result of the image pixel values reflected the important degree of information, so each spectrum diagram of three channel dimension values together to form a characteristic picture of 640 x 480.
Since the original pixel size range of each channel dimension is 0-255, the pixel value range of the feature map at this time is 0-765. To facilitate input for subsequent model calculations, map it to the range [0,255].
Finally, the mapped features are in the order of CQT and two MFCC-derived features from top to bottom in the channel dimension to form a fusion feature with a shape of 3×640×480.
The formula of the fusion process above is expressed as:
Where represents the feature map of the J-th layer in the channel dimension of the CQT spectral graph feature matrix, and have the same meaning. Concat represents connecting matrices in the channel dimension. Map represents the range mapping of matrix data, a matrix T with data range of (xmin,xmax), mapping its data to the range of (ymin,ymax), and the mapped matrix is
Where , and both represent a constant matrix with the same latitude as T, and its content is the value represented by the Angle symbol.
Existing models primarily increase the depth of the network to enhance feature extraction capabilities, but this leads to an increase in parameters while also losing a substantial amount of valuable information (Ji et al., 2023). In order to reduce the model’s parameter count and enhance its ability to extract multidimensional features, this paper, inspired by the Cross Stage Partial Network (CSPNet) (Wang et al., 2020), which efficiently extracts effective feature information to alleviate model complexity, proposes the Multi-gradient flow bottleneck with attention Block (Multi-grad Block).
The Multi-grad Block concatenates multiple residual modules (Resblocks) to form a multi-gradient flow network. This structure enables the rapid acquisition of target information and gradient flow information from different receptive fields, accelerating the model’s feature extraction speed while reducing the model’s parameter count. Since traditional convolution operations lack sufficient discrimination between the spectra of multiple target lines and ocean background noise during feature extraction (Li J. et al., 2022), MHSA is introduced in the Resblock to increase the model’s focus on targets rather than background noise or other irrelevant elements (Han et al., 2021). The detailed model structure is illustrated in Figure 4.
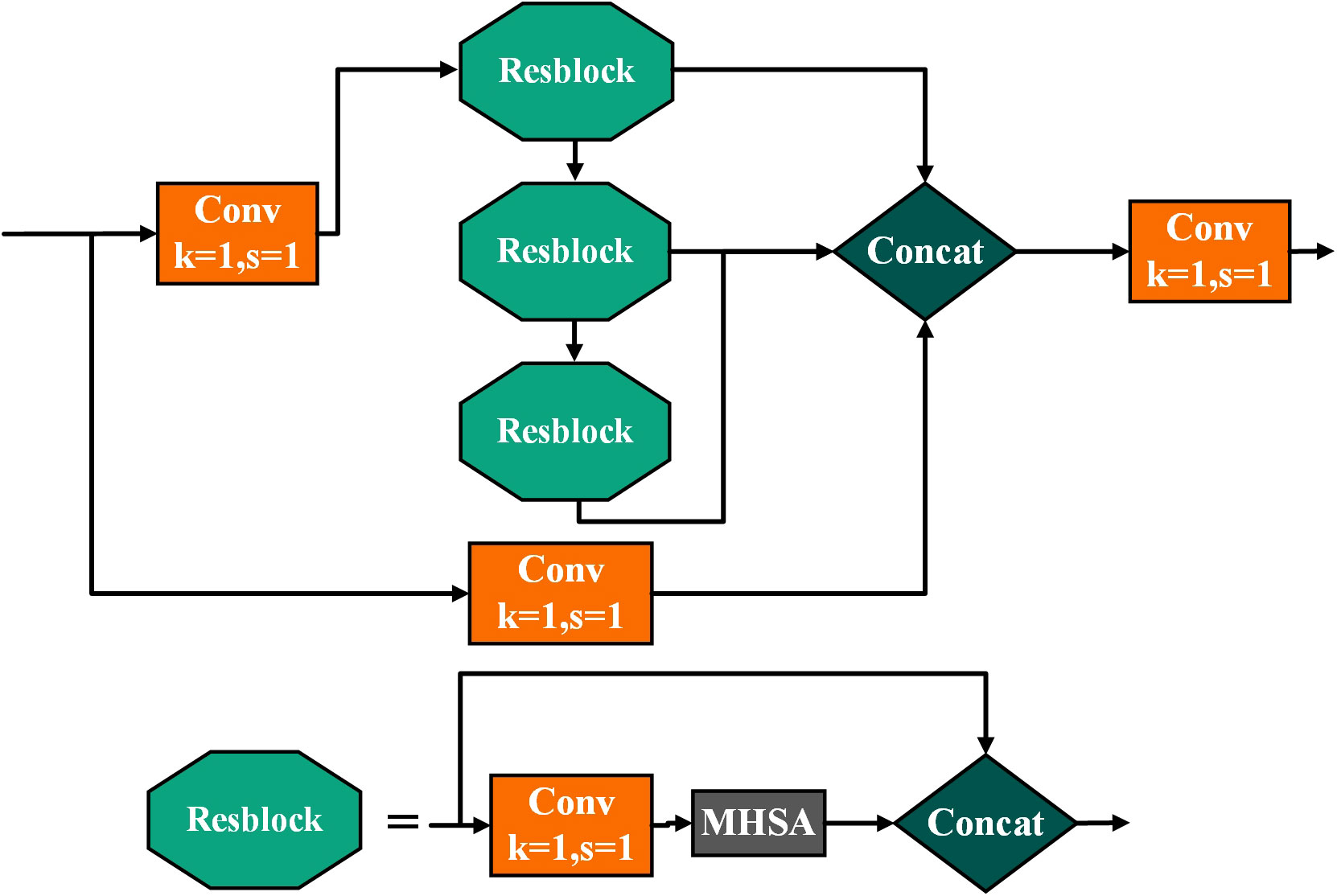
Figure 4 Model structure of Multi-grad Block.
The detailed calculation process for the MHSA is as follows. MHSA is calculated as follows.
where A, B, C denote the query vector, key vector and value vector respectively, Hi illustrates the output of the i-th head, h is the number of headers, and W° is the output transformation matrix. The output of each header headi can be expressed as
where , , are the A, B, and C transformation matrices for the i-th header, respectively, and Attention is a self-attentive calculation function with the following equation.
Where dk is the dimension of the key vector, softmax function mainly performs normalization, calculates the weight of each key vector, then multiplies the weight by the value vector, and finally performs weighted summation to get the attention output.
Due to the complex distribution of targets in the hybrid spectrogram generated by the feature extraction and fusion module of the original underwater acoustic signal, there are numerous small targets locally and larger, medium-sized targets globally (Wang B. et al., 2023). Using a single receptive field cannot fully capture the multidimensional features of the original signal, which reduces target classification accuracy (Wang Z. et al., 2023). To address these issues, this article introduces the Context Augmentation and Fusion Module (CAFM).
CAFM, as depicted in Figure 5, employs dilated convolution with varying rates to extract feature information from different receptive fields effectively (Gao et al., 2023). It enhances and fuses the multidimensional feature information obtained from the preceding gradient flow feature extraction module. Here’s a breakdown of its structure:
1. The effective feature information obtained from the pre-gradient flow feature extraction module is rapidly processed using dilated convolution with three distinct rate values.
2. Target feature information is subsequently enhanced separately by the adaptive feature enhancement module and the cascade computing module.
3. The effective features derived from the adaptive feature enhancement module and the cascade computing module are then weighted and fused.
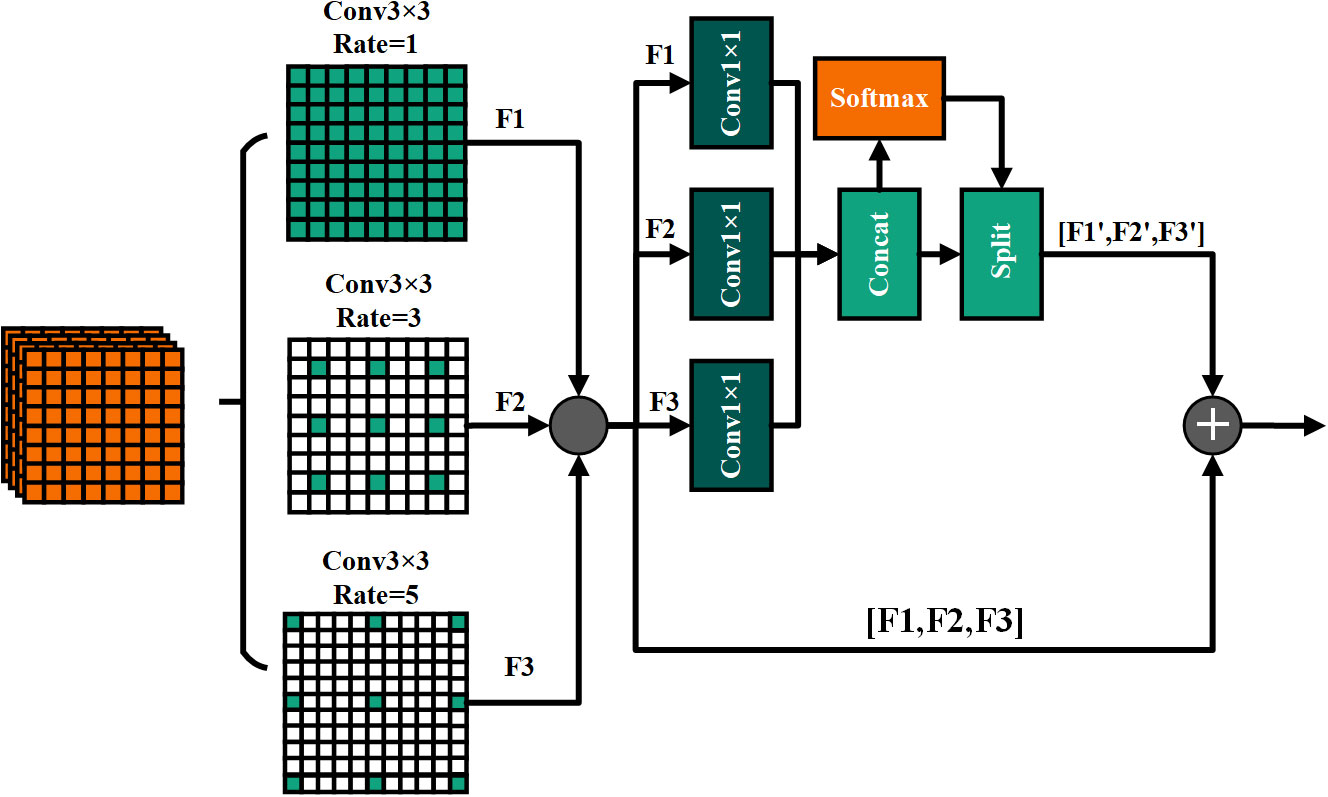
Figure 5 CAFM operation flows.
The former approach initially employs 1×1 convolution to compress and decrease the dimension of the pre-feature maps to single-channel feature maps. It then concatenates the feature maps in increasing rate order and calculates the weights for each channel using softmax. Finally, it enhances the channel dimension features through softmax-weighted multiplication.
The latter approach concatenates the feature maps obtained via expansion convolution at different rates to create a new feature map.
Existing mainstream classification loss functions primarily encompass the Cross-entropy Loss (CE) (Ho and Wookey, 2019) and its variations tailored for specific classification tasks. These adaptations include log loss (LL) (Lin et al., 2022) and BCE (Ruby and Yendapalli, 2020) for binary classification and focal loss (FL) (Lin et al., 2017) and categorical cross-entropy (CCE) (Ho and Wookey, 2019) for multi-class classification. However, the presence of a severe class imbalance among categories in underwater acoustic datasets poses a significant challenge (Zhou et al., 2021). Utilizing the aforementioned classification loss functions often leads to model overfitting (Leng et al., 2022), subsequently impacting recognition accuracy.
To tackle this challenge, this article introduces a novel loss function termed the Taylor-MCE Loss (Multiple Cross-Entropy Joint Loss Function based on Taylor Series). The Taylor-MCE Loss combines the polynomial terms derived from Taylor series expansion with BCE, FL, and low-order perturbation factors. It then transforms the multi-class classification task into a set of independent binary classification tasks, effectively resolving the issue of sample imbalance within the dataset and significantly enhancing the model’s recognition performance.
The detailed design process is as follows:
1. Selection of the base loss function
Multi-class classification aims to calculate the likelihood of an object belonging to multiple categories, while binary classification seeks to identify whether an object is a specific category (e.g., discerning whether an object is a dog or not). Although these tasks may seem to differ only in the number of predicted categories, they have fundamental distinctions. In standard multi-class classification, CCE serves as the loss function, primarily relying on softmax to calculate the likelihood of an object belonging to multiple categories and selecting the category with the highest probability as the prediction. In contrast, binary classification tasks primarily employ BCE as the loss function, using sigmoid (output values between 0 and 1) to determine whether an object is closer to category 0 or category 1.
To select a more suitable base loss function and assess whether binary classification loss functions can be adapted for multi-class tasks, we conducted experiments in multi-class target recognition. The application of binary classification loss functions in multi-class tasks involved treating each category as an independent binary classification task. During our experiments, we made an intriguing observation: when inter-class sample sizes were balanced, CCE exhibited stable performance. However, in cases of sample imbalance, the use of BCE for multi-class tasks resulted in a significant improvement in accuracy compared to CCE (refer to Table 1 for details).
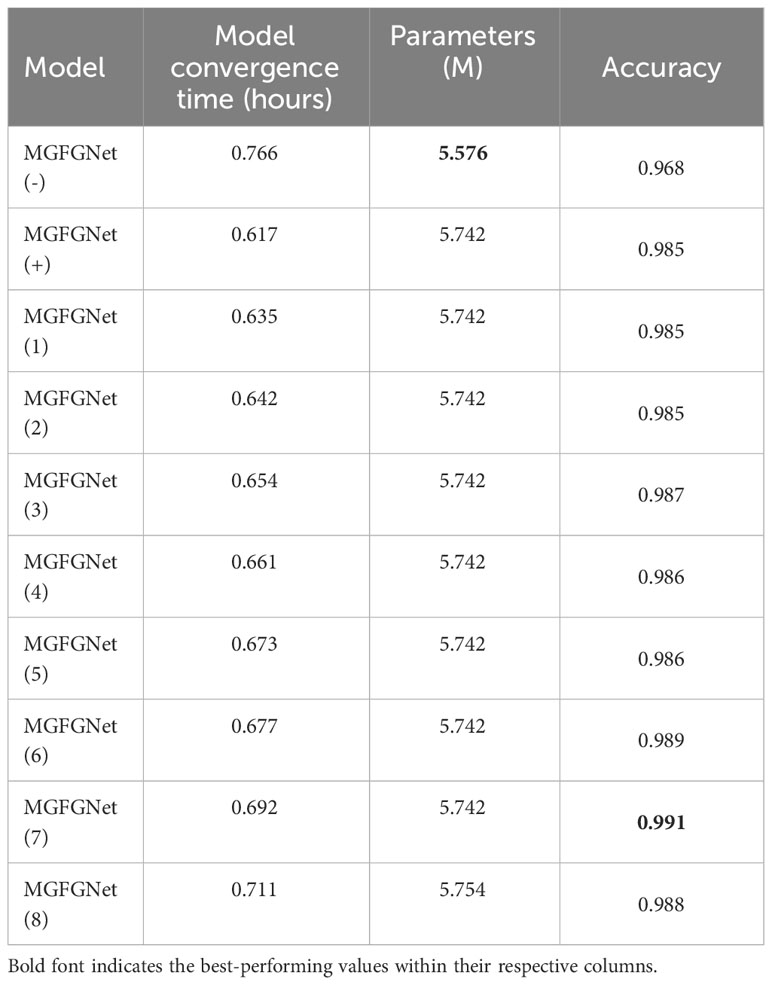
Table 1 Recognition accuracy, convergence time and number of parameters of CAFM at different locations of MGFGNet.
Treating each category as an individual binary classification task ensured that predictions for each category were mutually exclusive and independent (Ruby and Yendapalli, 2020), thereby addressing an issue. The problem when using CCE was that multiple categories were predicted simultaneously [mutually exclusive but not independent (Ho and Wookey, 2019)]. Models employing CCE often favored categories with larger sample sizes, potentially overshadowing smaller categories during training (Leng et al., 2022). Additionally, BCE’s core function was to enhance foreground weights while suppressing backgrounds (considering all other categories as backgrounds when predicting a single category) (Ruby and Yendapalli, 2020). This effectively balanced feature acquisition for different categories.
2. Exploring the relationship between loss functions using taylor series
The mutual constraints imposed by multiple categories can slow down model convergence. While combining multiple loss functions can enhance convergence speed and recognition accuracy (Li et al., 2019), it can also increase computational complexity. To minimize computational overhead while mitigating the impact of imbalanced datasets on the model, we drew inspiration from the Taylor series (Gonzalez and Miikkulainen, 2021) and explored the mathematical properties of BCE’s polynomial form and loss functions designed to address imbalanced datasets. Our goal was to introduce minimal perturbation terms that retained the essential functionality of the loss function.
Since BCE can be represented as:
where bi ∈ {0,1} represents labels, and a represents predicted probabilities, and BCE is a special form of CCE, assuming
CCE can be expressed as:
Applying Taylor series to CCE, the expression becomes:
By observing the relationship between the Taylor expansion of CCE and FL, it is apparent that FL is equivalent to a horizontal shift (modulation factor) c of CCE. This is expressed as:
BCE is a special form of CCE; therefore, their physical properties are fundamentally consistent, differing mainly in the prediction process. To enhance the model’s ability to address imbalanced datasets, we introduced an element to strengthen the suppression of imbalanced samples within the original BCE. This addition involved increasing the horizontal offset, resulting in the loss function:
where α1 + α2 = 1 represents a scaling factor.
3. Analyzing the impact of gradient on loss functions
To enhance model recognition accuracy with minimal computational overhead, we compared the gradients of various loss functions and evaluated the influence of low-order and high-order terms on model recognition accuracy. The gradients of the aforementioned two loss functions (Eqs. 13 and 14) are expressed as follows:
From the equations, it is evident that CCE possesses a fixed gradient term of 1. As i surpasses 1 and ai approaches 1, the ith gradient tends towards zero. FL exhibits similar characteristics but introduces an additional perturbation factor (c). Consequently, the coefficients of high-order, low-order, and high-order terms collectively influence the outcomes of the loss function. The high-order parts primarily serve to suppress model errors, while the low-order components play a crucial role in fine-tuning the model to reach correct conclusions (Zhang et al., 2023). Therefore, we introduce a perturbation factor into the low-order term coefficients of CCE to enhance the model’s recognition performance.
In summary, to mitigate the impact of sample imbalance on the model while minimizing the increase in parameter complexity, we propose the Taylor-MCE Loss. The expression is as follows:
where β1 ∈ [-1,∞) represents the perturbation factor.
To evaluate the performance of MGFGNet in a real underwater environment, we employ authentic underwater acoustic public datasets for both qualitative and quantitative comparisons. These comparisons involve MGFGNet and various versions with varying network depth and width of mainstream existing underwater acoustic target recognition models, including ResNet and EfficientNet (Mateo and Talavera, 2020).
To assess the model’s performance under ideal conditions, this study employed the Deepship dataset (Irfan et al., 2021), comprised of underwater acoustic data from vessels recorded by Northwestern Polytechnical University in the marine environment beneath the sea surface at depths ranging from 141 to 147 meters in the Georgia Strait Delta from 2016 to 2018. The data and time labels for this dataset were obtained by deploying sensors to locate vessel positions. Only singular vessel signals within a 2-kilometer range of the sonar device were considered, and recording ceased whenever a vessel exceeded this range. The dataset encompasses data from 265 vessels, including Cargo ships, Passenger Ships, Oil Tankers, and Tugs.
The data underwent preprocessing, with all WAV format audio files standardized to a 22,050Hz sample rate. Additionally, the underwater acoustic data were segmented into 5-second units, resulting in over 30,000 labeled sound samples. Recognizing that the model’s recognition accuracy is proportional to the sample size of the training set, a significant number of samples were allocated for model training to mitigate the risk of overfitting. To prevent substantial fluctuations in the model’s recognition accuracy due to a small sample size, a portion of the data was reserved for validating and testing the model’s performance. Consequently, for optimal model parameter training, a large portion of the data was allocated to model training, with only a small amount used for validation and testing, following an 8:1:1 split ratio for the training, validation, and test sets. Table 2 provides details of the dataset division.

Table 2 Details of the four categories in the Deepship dataset after pre-processing.
So as to assess the model’s capacity to adapt to diverse maritime environments, emphasizing its generalization capability, this study incorporated an additional authentic dataset of ship radiated noise collected in a real-world marine setting. The data collection took place along the Atlantic coast of Spain and encompasses recordings from 11 distinct ship types. These 11 ship categories were subsequently classified into four classes based on ship categorization, with the actual ocean background noise measurements, taken within these four categories, amalgamated to construct a five-class underwater acoustic dataset.
The dataset encompasses a total of 90 audio recordings, with individual recording durations varying from 15 seconds to 10 minutes. To ensure experimental precision, the “ShipsEar” dataset (Santos-Domínguez et al., 2016) underwent preprocessing identical to that applied to the “Deepship” dataset. A comprehensive class distribution is outlined in Table 3.
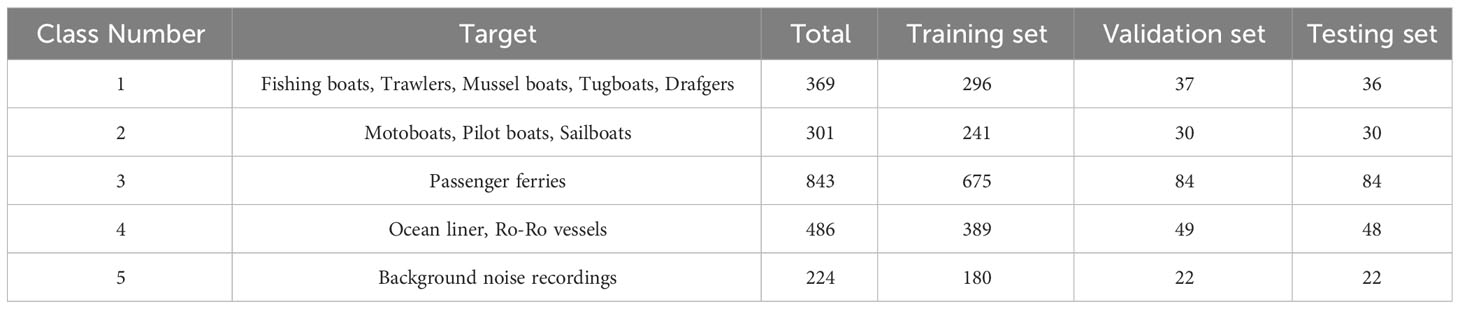
Table 3 Details of the five categories of the ShipsEar dataset after pre-processing.
It is conspicuous that in the “Deepship” dataset, class proportions for classes 1-4 approximate ratios of 1:1.2:1.15:1.06. Conversely, the “ShipsEar” dataset presents imbalanced class proportions for classes 1-5, displaying a ratio of approximately 1.64:1.34:3.76:2.17:1. Consequently, when compared to the “Deepship” dataset, the “ShipsEar” dataset not only illustrates class imbalance but also contains significantly fewer samples, representing approximately 1/15 of the “Deepship” dataset. Such a dataset is highly susceptible to overfitting during the training process due to its limited sample size. Additionally, class imbalance can lead to notably reduced accuracy in recognizing classes with fewer samples.
Synthetic Aperture Sonar (SAS) images (Huang and Yang, 2022; Wang and Huang, 2023; Yang, 2023; Zhang, 2023), known for their high resolution, significantly aid in target recognition in underwater acoustics. In order to assess the model’s performance on a high-resolution underwater acoustic image dataset, this study introduces the SCTD dataset (Zhou et al., 2021). Since the original SCTD dataset is primarily designed for target detection tasks and its structure is not conducive to underwater acoustic target recognition models, certain modifications were implemented to adapt it to the classification task. Specifically, for the aircraft, human, and shipwreck categories within SCTD, the following steps were taken:
Firstly, multiple targets within a single image were individually cropped to ensure that each final image contains only one target, aligning it with the training sample format for target recognition.
Secondly, to augment the samples and balance the representation of each category, random cropping and flipping techniques were employed.
Finally, the dataset was partitioned into training, testing, and validation sets in an 8:1:1 ratio, as detailed in Table 4.

Table 4 Details of the three categories of the SCTD dataset after pre-processing.
During the experimental process, the underwater acoustic target recognition model, MGFGNet, employed the Adaptive Moment Estimation optimizer (Adam) (Irfan et al., 2021) to mitigate sample noise interference. For this optimization process, the first-order momentum factor, second-order momentum factor, and Fuzz factor within Adam were configured at 0.9, 0.999, and 0.0000001, respectively. The initial learning rate was set to 0.001, with a weight decay coefficient of 0.0005, and a batch size of 32 was utilized. Finally, a1 = 0.5, a2 = 0.5, c = 5 and β1 = 5 in Taylor-MCE Loss are set. The model was trained for 120 epochs (iterations) using the aforementioned parameters. Throughout the experimental process described below, unless otherwise specified, the experiment parameters mentioned above were consistently applied.
The experiments were conducted on the PyTorch platform, running on the Windows 10. The hardware setup employed for these experiments is detailed in Table 5. To mitigate the potential influence of experimental variability, a systematic approach was taken. It involved the training and testing of various models, both qualitatively and quantitatively. Subsequently, a comparative analysis of algorithmic performance was performed.
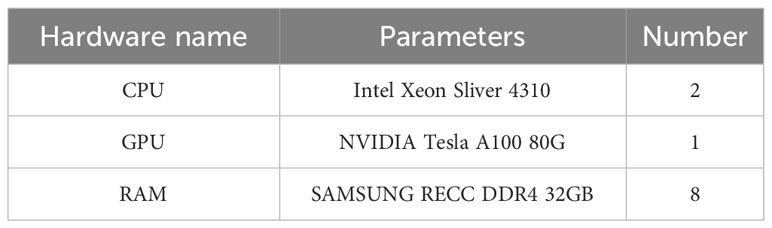
Table 5 Details of the hardware environment for the experiment.
Given that Accuracy can reflect the model’s recognition capability across multiple classes, while Precision and Recall can indicate the overall classification performance of the model, these three evaluation criteria are employed to assess different models. Their formulas are as follows:
where TP represents instances that were originally true positive samples and were correctly predicted as positive samples by the underwater acoustic target recognition model. TN corresponds to instances that were originally true negative samples and were accurately predicted as negative samples by the model. FP signifies instances that were originally true negative samples but were erroneously classified as positive samples by the underwater acoustic target recognition model. FN stands for instances that were originally true positive samples but were incorrectly predicted as negative samples by the model.
To confirm the representational capabilities of the feature extraction approach raised in this study for original underwater acoustic signals, Table 6 presents an extensive comparison of diverse characteristics abstraction approachs on the Deepship. This comparison encompasses the original two-dimensional features, their corresponding three-dimensional counterparts, and the three-dimensional feature fusion approach introduced in Section 2.2 within the MGFGNet model. Notably, the recognition accuracy of spectral features for each feature extraction method surpasses that of the original two-dimensional features. Delta MFCC, owing to its ability to capture temporal correlations of MFCC, exhibits higher experimental accuracy than MFCC features, albeit with a modest 0.2% increase. Similarly, double-delta MFCC records a mere 0.4% improvement over delta MFCC since it primarily focuses on local estimations along the time axis for the differential operations of MFCC. CQT features, reflecting the frequency distribution patterns of underwater acoustic targets, outperform MFCC and its derivative features in terms of classification accuracy, thereby validating the superiority of CQT features over mel-spectrogram features (Domingos et al., 2022) in underwater acoustic target recognition. The horizontal comparison of spectral feature extraction methods among various feature extraction techniques exhibits similar characteristics as mentioned above.
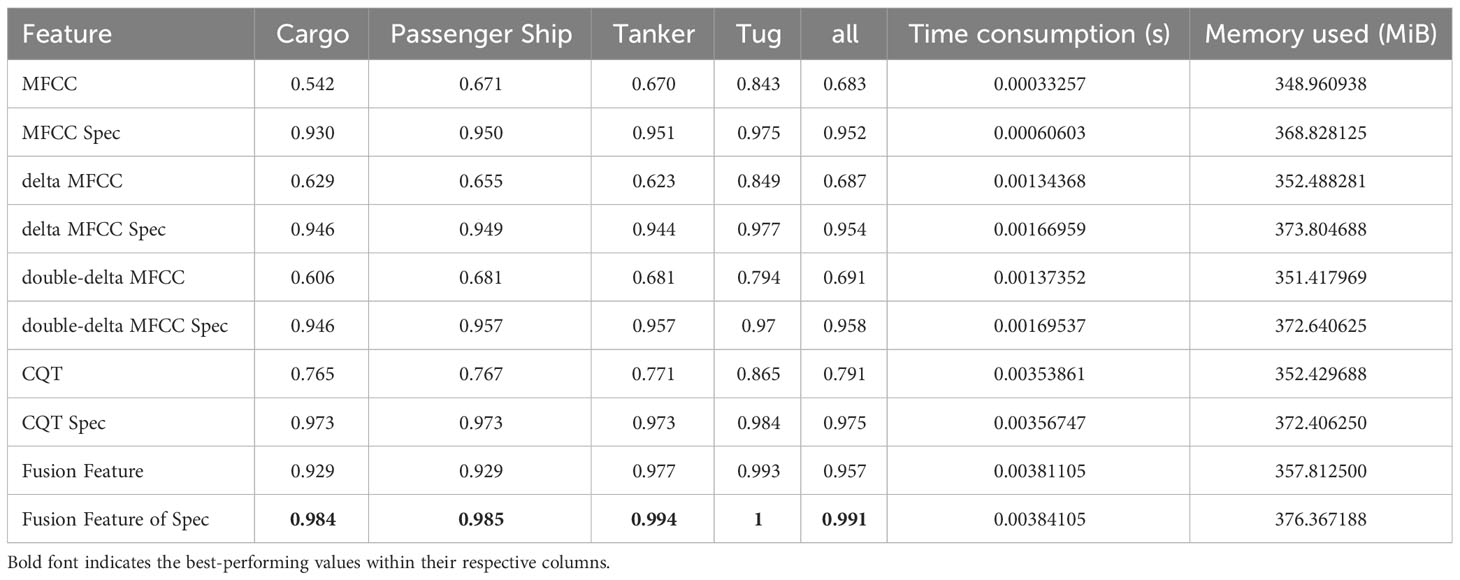
Table 6 Recognition Accuracy of MGFG model on Deepship dataset using different features and the memory consumption and efficiency of each feature extraction method.
It’s worth mentioning that the overall accuracy of the fusion feature approach proposed in Section 2.2 surpasses that of other feature extraction techniques, achieving 99.1%. This represents a substantial increase of 3.9%, 3.7%, and 3.3% over the spectral features of MFCC, delta MFCC, and double-delta MFCC, respectively. Additionally, it outperforms CQT’s spectral features by 1.6%. Moreover, there is a substantial increase in recognition accuracy across all categories compared to the spectral feature extraction methods of the remaining four features, thus validating the superiority of the fusion approach based on signal processing and brain-like features proposed in this study.
So as to provide a clearer illustration of the computational cost and efficiency of the feature extraction and fusion method introduced in this paper, we conducted additional experiments to assess the performance metrics of various feature extraction techniques. The testing dataset comprised 10 sets, each containing 10 noise data samples, and the experimental results represent the average of these 10 sets. Detailed experimental data is displayed in Table 6.
It is evident that the execution time for each feature extraction method’s feature mapping technique increased by only approximately 0.0003 in comparison to the original method, with a memory consumption increment of around 20 MiB. Concurrently, the execution time of the feature extraction and fusion method proposed in this paper, which integrates three original feature components, remains within the same order of magnitude as their individual runtimes, indicating minimal additional time overhead.
Moreover, the memory consumption of the proposed method in this paper remains approximately at 350 MiB, aligning with the memory usage of all other feature extraction methods. This reaffirms the superiority and efficiency of the proposed method.
So as to comprehensively evaluate the computational cost, convergence time, and performance of the feature extraction and fusion method presented in this paper at various positions within MGFGNet, a series of experiments were conducted. The experimental results on the Deepship dataset are presented in Table 1. In the model parameter nomenclature, the suffix indicates the layer within the target recognition model as depicted in Figure 1. For instance, “MGFGNet (1)” signifies the placement of the CAFM module after Layer 1 of MGFGNet, “-” indicates the absence of the CAFM module, and “+” denotes its placement at the beginning of MGFGNet, as illustrated in Figure 1.
Firstly, the integration of the CAFM module results in a modest 2.9% increase in model parameters compared to the original model. However, it significantly expedites the model’s convergence speed. Furthermore, the convergence speed varies when the CAFM module is positioned at different locations within the model, and the speed is directly proportional to the sequence of the CAFM within the model. This is primarily due to the enhanced discriminability between background and target foreground in the feature maps when this module is applied, resulting in accelerated model convergence speed. Notably, after introducing the CAFM, the convergence time consistently remains between 0.6 and 0.7 hours, confirming the model’s stability. In this experiment, convergence is defined as the point at which the loss remains unchanged in the thousandths place for three consecutive iterations.
Additionally, the incorporation of the CAFM module leads to a minimum 1.7% enhancement in recognition accuracy within MGFGNet, validating the CAFM module’s capacity to boost model recognition accuracy through feature fusion and enhancement. However, the placement of the CAFM module also exerts an impact on recognition accuracy. For example, when the CAFM module is positioned at the head of MGFGNet and after Layer 1-2, the model exhibits improved recognition accuracy due to the fusion of multiscale acoustic target information and enhanced channel features. However, when the CAFM is placed at Layer 1, it leads to a rapid extraction of raw input features through a large convolutional kernel (kernel size of 6), resulting in the loss of significant valuable features and, consequently, inhibiting recognition accuracy. Furthermore, there is no subsequent feature enhancement in the feature extraction process, causing lower recognition accuracy compared to when the CAFM is placed after Layer 3-6.
Conversely, placing the CAFM module after Layer 3-6 introduces the Multi-gradient Block in front of the CAFM module, enriching the fused and enhanced features with a substantial amount of multi-gradient flow contextual information compared to the original information. This, in turn, enhances target feature information, leading to improved recognition accuracy. The highest recognition accuracy is achieved when the CAFM module is placed after Layer 7, as the model has undergone all the Multi-gradient Blocks by this stage, resulting in feature maps rich in multi-gradient flow, physical features, and numerous feature details. When the CAFM module is employed for feature fusion and enhancement at this stage, it effectively increases the importance of target information, thereby enhancing recognition accuracy.
However, due to the feature enhancement process preserving a substantial amount of suppressed background features, direct utilization of these feature maps for predictions can compromise experimental accuracy (Hu et al., 2018; Hou et al., 2021). Therefore, after employing the feature enhancement module, it is necessary to conduct further feature extraction on the enhanced feature maps using convolutional or feature extraction modules. This step helps discard numerous non-target features. For instance, attention mechanisms (AM) (Yang S. et al., 2023) and channel attention modules (CAM) (Li J. et al., 2022) both serve as feature enhancement modules. Ablation experiments have demonstrated that utilizing feature extraction or convolutional modules after feature enhancement enhances model recognition accuracy (Li J. et al., 2022; Yang S. et al., 2023). This substantiates why placing CAFM after Layer 7 results in higher recognition accuracy compared to after Layer 8.
To assess the impact of the Taylor-MCE Loss on MGFGNet, this paper compared the recognition results of MGFGNet with various loss versions, including BCE, CCE, FL, and Taylor-MCE Loss, utilizing the Deepship dataset. The numbers 1, 2, and 3 following Taylor-MCE represent , , and , respectively. Notably, and have real values only when coexisting; otherwise, both are set to 1. A comprehensive summary of the experimental results is presented in Table 7.
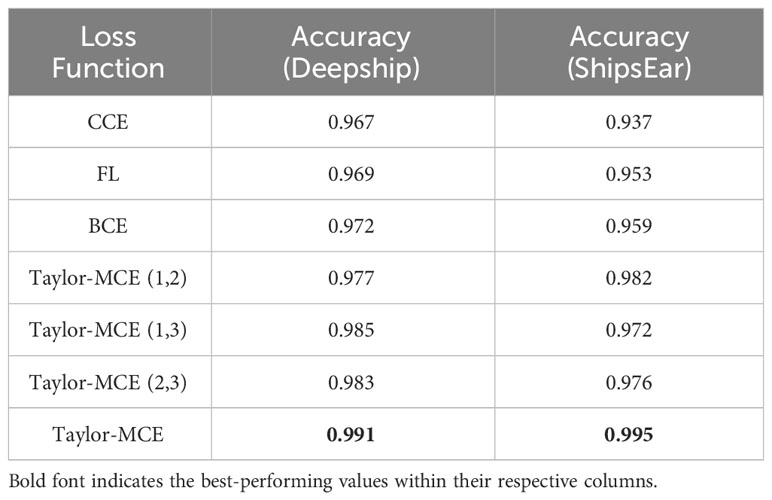
Table 7 Recognition accuracy of MGFGNet with different classification loss functions on Deepship and ShipsEar.
Firstly, it is evident that Taylor-MCE Loss outperforms CCE, FL, and BCE in terms of recognition accuracy, demonstrating improvements of 2.4%, 2.2%, and 1.9%, respectively. The recognition accuracy of CCE and FL is quite similar. FL is derived from CCE through lateral shifting, aimed at mitigating the issue of sample imbalance. However, within the context of the Deepship dataset, where various classes exhibit a good balance, its effectiveness in addressing sample imbalance is reduced, resulting in a modest improvement of 0.2% compared to CCE. BCE, serving as a special form of CCE for binary classification, achieves a recognition accuracy improvement of 0.5%. This is primarily because BCE transforms multi-class classification into multiple binary classification tasks, where the predictions for each class are mutually exclusive and independent. This approach addresses a problem present in CCE where multiple classes are predicted simultaneously, leading the model to favor classes with larger sample sizes. This imbalance gradually drowns out smaller classes during training, providing a key rationale for choosing BCE as the base loss function for Taylor-MCE Loss. Taylor-MCE (1,3), inclusive of low-order perturbation terms (), contributes to the model’s improved recognition accuracy, resulting in a significant advantage over Taylor-MCE (1,2), which only encompasses the component for addressing imbalance (). This finding reinforces the conclusion that low-order terms enhance recognition accuracy (Zhang et al., 2023). Taylor-MCE (2,3) achieves similar recognition accuracy to (1,3), primarily due to the relatively balanced distribution of class samples in the Deepship dataset, rendering the influence of (2,3) insufficient to significantly alter recognition accuracy.
As the Deepship dataset comprises a substantial number of samples with a relatively balanced class distribution, it does not effectively validate the loss function’s ability to suppress small samples and enhance recognition accuracy in unbalanced datasets. To further confirm the adaptability of Taylor-MCE Loss to imbalanced, small-sample underwater sound datasets, we conducted experiments using different classification loss functions on the ShipsEar dataset, characterized by class imbalance and limited sample sizes. A detailed overview of the experimental results is provided in Table 7. The unique sample characteristics of ShipsEar, featuring fewer samples and imbalanced class distributions, result in notable differences in model recognition accuracy when employing various loss functions. CCE, due to its lack of optimization for class imbalance, exhibits lower recognition accuracy compared to other loss functions. Both FL and BCE, which address class imbalance using different approaches (FL introduces horizontal shifting on top of CCE, while BCE transforms multi-class into multiple binary classification tasks to mitigate imbalance), yield similar and significantly improved recognition accuracy compared to CCE. In contrast, the results of the various versions of Taylor-MCE Loss are entirely opposite to those observed in the Deepship dataset. Given that the ShipsEar dataset has fewer samples and imbalanced class distributions, it necessitates substantial suppression of the imbalance component. When utilizing only the low-order perturbation term to enhance recognition accuracy, specifically Taylor-MCE (1,2), its recognition accuracy surpasses BCE by 2.3%, compared to the mere 0.9% improvement. Taylor-MCE effectively balances recognition accuracy and mitigates model overfitting attributed to class imbalance during training, ultimately yielding a recognition accuracy of 99.5%. This figure is 5.8%, 4.2%, and 3.6% higher than CCE, FL, and BCE, respectively.
These experiments affirm the adaptability of Taylor-MCE Loss to small-sample, imbalanced datasets, significantly enhancing model recognition accuracy.
In this section, we compare the performance of MGFGNet with existing state-of-the-art target recognition models [such as ResNet (He et al., 2016), EfficientNet (Koonce, 2021), DenseNet (Iandola et al., 2014), etc.] under the same experimental conditions, examining various aspects.
To validate whether MGFGNet outperforms existing mainstream target recognition models, we trained and validated MGFGNet and other mainstream models under the experimental conditions described in Sections 3.2 and 3.3. The parameters of each model and their experimental accuracy on the Deepship test set are presented in Table 8. It is noteworthy that, to reduce the training time for various models, we modified the training epochs for all models on the Deepship dataset to 90. This decision is supported by the observation, as depicted in Figure 6, that MGFGNet exhibits a tendency toward convergence in loss before 90 epochs, with the optimal model being formed around the 71st epoch.
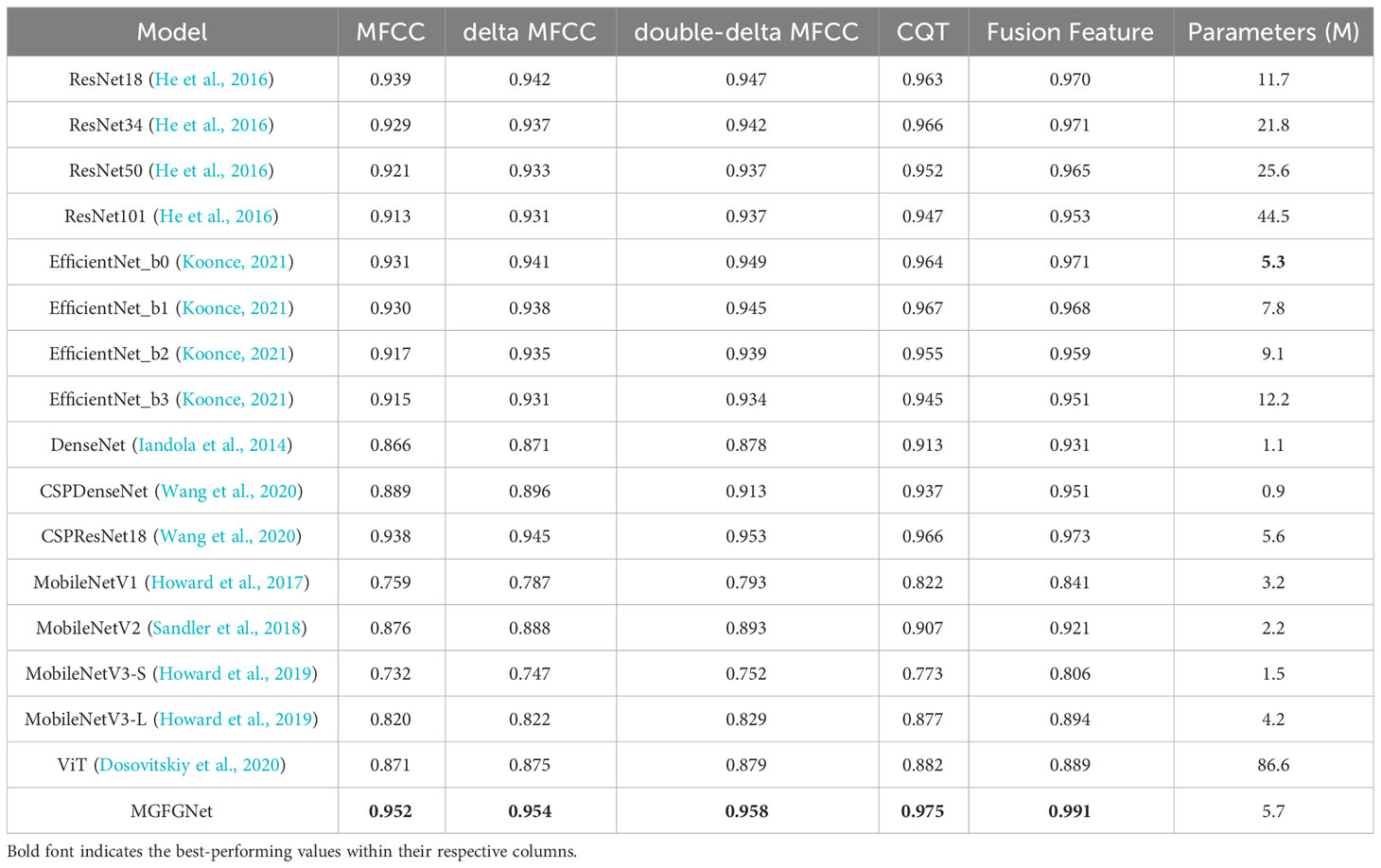
Table 8 Details of the number of parameters and the recognition accuracy on the Deepship dataset for various models.
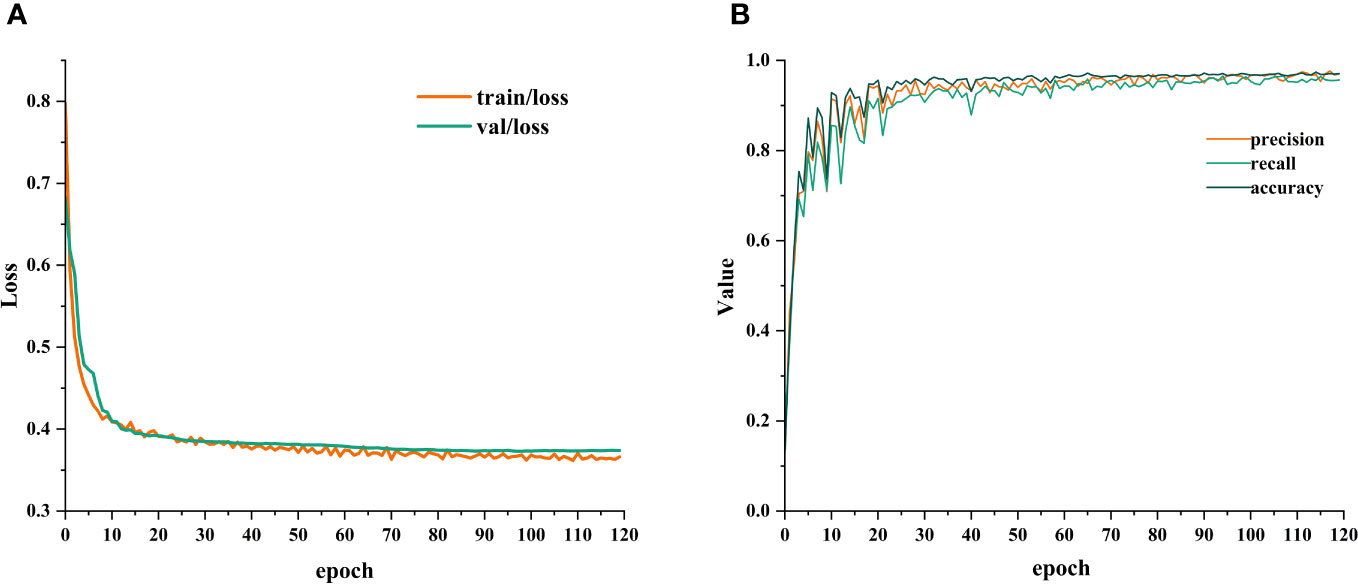
Figure 6 Variation of parameters during MGFGNet training: (A) Loss variation plot; (B) Precision, recall, and accuracy variation plot.
Clearly, MGFGNet demonstrates experiment accuracy superior to existing mainstream target recognition models across various feature input scenarios. This validates the robust feature extraction capability of MGFGNet in diverse experimental environments.
Furthermore, CSPNet (Wang et al., 2020) not only reduces model parameters but also effectively promotes the model’s feature extraction capability. For instance, testing the original versions of ResNet18 (He et al., 2016) and DenseNet (Iandola et al., 2014), along with their versions incorporating CSPNet, reveals a noticeable reduction in parameters and an improvement in model performance under various feature inputs. MGFGNet, based on the CSPNet philosophy with the multi-gradient flow module as a primary component, successfully achieves an effective balance between recognition accuracy and parameter count.
The size of the model’s parameters also influences recognition accuracy. Models with either too many or too few parameters yield suboptimal experimental accuracy. For example, ViT (Dosovitskiy et al., 2020) has significantly more parameters than other models, yet its recognition rate is lower than most models. In contrast, the MobileNet (Howard et al., 2017; Sandler et al., 2018; Howard et al., 2019) series, characterized by smaller parameter counts as lightweight models, generally exhibits lower recognition accuracy compared to other models. However, DenseNet and CSPDenseNet (Wang et al., 2020), despite having fewer parameters, achieve high recognition accuracy. This is mainly attributed to the dense connectivity in DenseNet, ensuring low-dimensional feature information and a stronger gradient flow (Iandola et al., 2014).
Within the same model, variations in recognition accuracy due to changes in model depth show a negative correlation with the number of parameters. As the number of parameters increases from ResNet18 to ResNet101 in the ResNet model, the recognition accuracy gradually decreases. A similar trend is observed in the EfficientNet (Koonce, 2021) model. However, different network models do not exhibit this phenomenon due to diverse feature extraction methods. For example, ResNet18 and EfficientNet_b3 have similar parameter counts, but ResNet18 outperforms EfficientNet_b2 in recognition accuracy across various feature extraction methods. Different versions of MobileNet do not show this phenomenon because new feature extraction or enhancement modules are introduced in each version.
To assess the training and inference efficiency of MGFGNet, this section analyzes the time consumption for training and inference of MGFGNet and its comparative models. Detailed comparative results are provided in Table 9. It is noteworthy that, to reduce the training time of the models, we maintained consistency with Section 3.5.1 and modified the training epochs for all models on the Deepship dataset to 90. The convergence definition for this experiment is when the value of the thousandth loss percentile remains unchanged for three consecutive times during the training process, indicating model convergence.
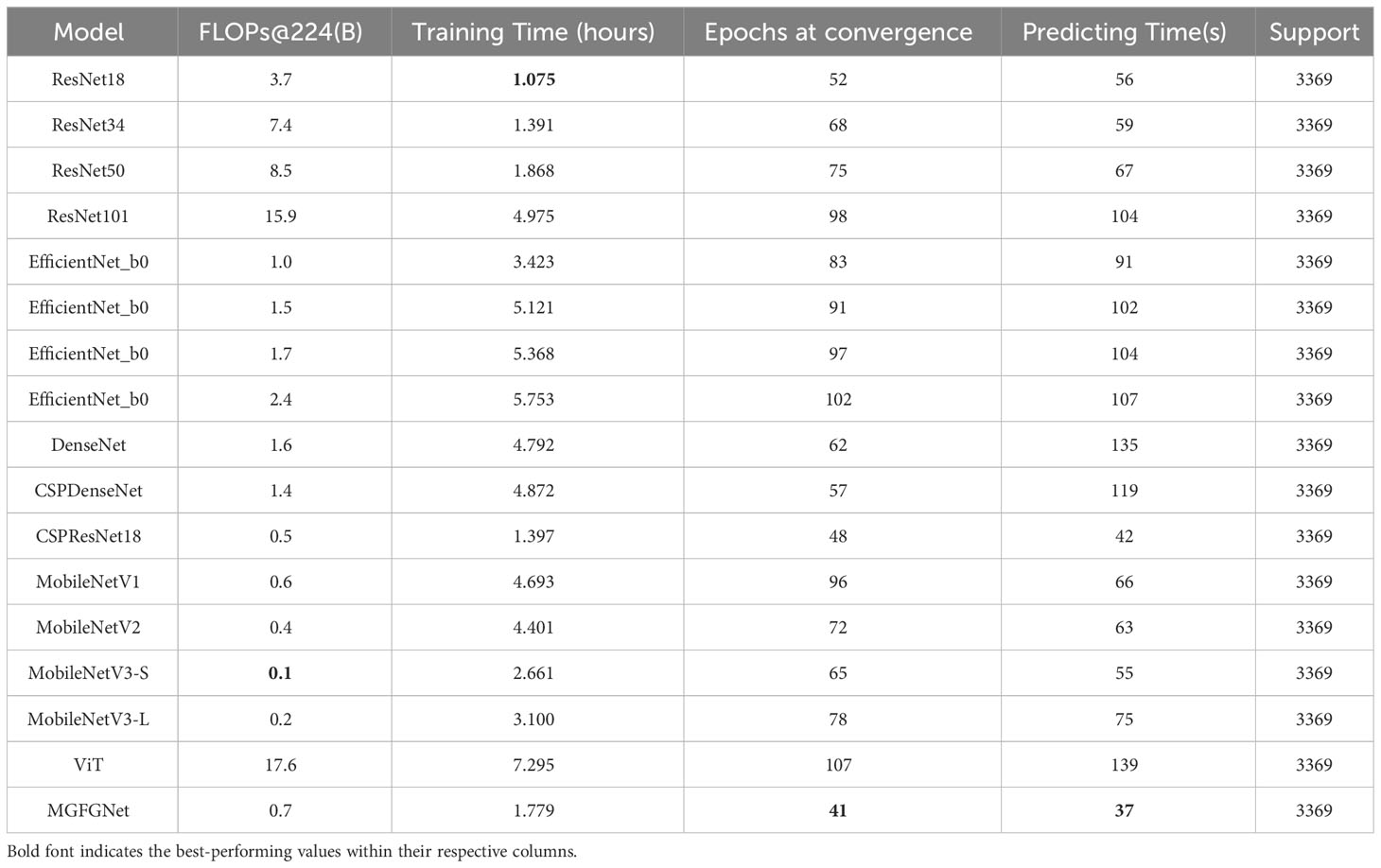
Table 9 Floating-point computation vs. training and predicting time.
During the experiments, variations in the training and prediction times of models were observed in different operating environments. To ensure the accuracy of experimental data, each model, during its runtime, had the host free of other GPU-intensive deep learning tasks, preventing interference with the experimental results. Additionally, to mitigate random factors, all experimental data are the averages of results obtained from five repeated experiments. Floating Point Operations per Second (FLOPs) are used to measure the computational complexity of the model. Training time refers to the total time for model training and validation. Inference time denotes the total time required for predicting 3369 individual samples from the validation set of Deepship.
Notably, MGFGNet exhibits superior inference time compared to all comparative models, especially the lightweight MobileNet series commonly used in embedded systems, demonstrating its practical utility. This is primarily attributed to the inference time reduction effect of CSPNet (Wang et al., 2020). For instance, the inclusion of CSPNet in ResNet and DenseNet also significantly reduces inference time. MGFGNet, incorporating the CSPNet philosophy through the Multi-grad Block, outperforms EfficientNet_b0 in prediction time, despite having similar parameter counts and FLOPs values.
Furthermore, MGFGNet achieves convergence in the fewest epochs, indicating a faster convergence rate. This is mainly due to Taylor-Loss suppressing the rate of model variation under different numbers of input categories, thereby accelerating model convergence. It is observed that within models of the same architecture, parameters and convergence epochs exhibit a positive correlation, as seen in ResNet and EfficientNet series. While MobileNet has a smaller parameter count, its frequent occurrence of gradient vanishing during training, mainly due to the use of depthwise separable convolution, leads to extensive time spent correcting and updating the model, resulting in an increased number of convergence epochs.
Additionally, while MGFGNet’s training time is lower than that of most target recognition models, it still exceeds that of ResNet18, ResNet34, and CSPResNet18. This is mainly because the Multi-grad Block module, based on the CSPNet philosophy, invented in MGFGNet, reduces the number of parameters but increases the computational workload for backward gradient updates (Wang et al., 2020), thus extending the model’s training time. The increased training time for CSPDenseNet and ResNet18 with CSPNet also validates this characteristic. However, since practical applications primarily require low prediction times for rapid target recognition, this drawback has minimal impact in real-world scenarios.
Finally, upon contrasting Tables 8 and 9, it becomes evident that there is no inherent correlation between the training time, model parameters, and FLOPs for the models. For instance, when compared to ResNet18, DenseNet, CSPDenseNet, and the MobileNet series all exhibit smaller parameter counts and FLOPs. However, these models demonstrate longer training times than ResNet18. A similar experimental pattern is observed between the EfficientNet and ResNet series.
Figure 6 presents the loss variation chart as well as the precision, recall, and accuracy variation charts on the validation set during the same 120-epoch training process on the Deepship dataset.
From the loss curve, it can be observed that the network gradually stabilizes after the 60th epoch. By examining the changes in precision, recall, and accuracy on the validation set during the training process, with smooth variations and the absence of overfitting, it can be concluded that the proposed underwater acoustic target recognition model, MGFGNet, demonstrates stability.
To assess the robustness of MGFGNet, i.e., the extent to which the model is affected by small variations in the data, we utilized spectrogram features of MFCC and its derived characteristics. Due to the high similarity between spectrograms of MFCC and its derived features (Yang S. et al., 2023), this study thoroughly compared the dependency of various models on different input conditions based on spectrogram features of MFCC and its derivatives, as illustrated in Figure 7.

Figure 7 Recognition accuracy of multiple models under MFCC, delta MFCC and double-delta MFCC features.
It is evident that MGFGNet exhibits a relatively small disparity in experimental accuracy when considering spectrogram features of MFCC and its derived characteristics. However, there is still some improvement, indicating that MGFGNet can capture minor variations in the derived features of MFCC without causing significant predictive differences due to slight changes. This validates the robustness of the model.
ResNet18, DenseNet, and ViT models demonstrate comparable recognition accuracy across these three different feature extraction methods. In contrast, other models exhibit significant variations in model responses under these three feature extraction methods, indicating their reliance on features with high separability.
Due to varying predictive capabilities of models across different variable domains (distinct real underwater acoustic datasets), it is essential to assess the generalization performance of MGFGNet on additional datasets. This study conducts experiments placing each model under the experimental conditions defined in Sections 3.2 and 3.3, utilizing the shipsEar dataset. Detailed experimental results are presented in Table 10.
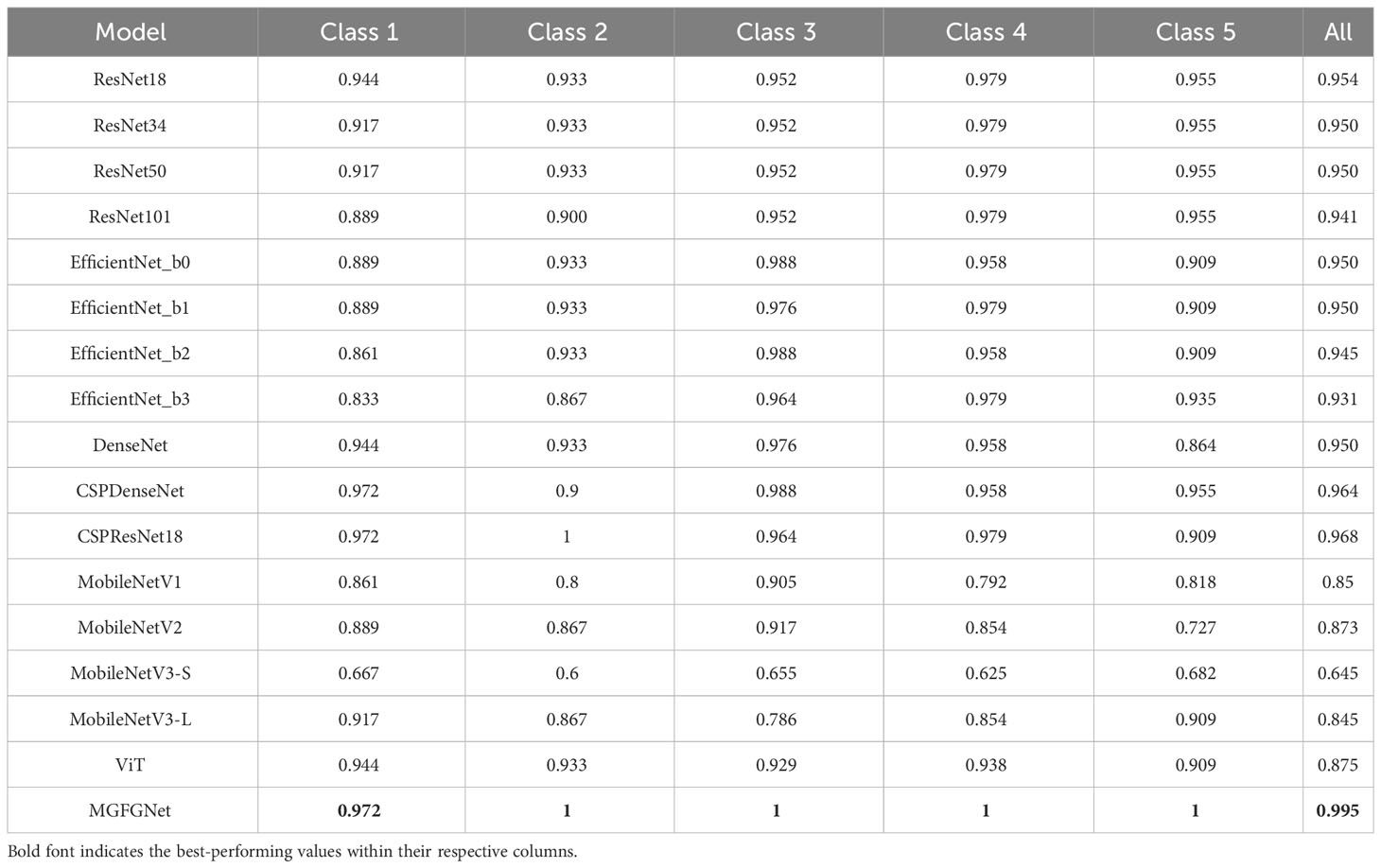
Table 10 Details of the models’s recognition Accuracy on the shipsEar dataset.
Evidently, MGFGNet exhibits a recognition accuracy surpassing all comparative models, achieving 99.5%. Furthermore, it is observed that MGFGNet achieves a 100% recognition rate for all categories except Class 1. This fact indicates a robust generalization capability of the model.
Additionally, on the shipsEar dataset, the ResNet series, Efficient series, and DenseNet also demonstrate strong performance, with recognition accuracies exceeding 93%. It is noteworthy that, with the involvement of CSPNet, DenseNet and ResNet18 show improved recognition accuracy, exceeding 96%, validating their enhancement in model feature extraction capabilities (Wang et al., 2020).
Finally, the MobileNet series performs poorly, with MGFGNet surpassing the highest recognition accuracy within its series, MobileNetV2, by 12.2%, and outperforming the lowest accuracy in MobileNetV3Small by 35%.
In order to further validate the scalability of MGFGNet on high-resolution sonar images, this study conducted experimental analyses, comparing MGFGNet with 16 other underwater acoustic target recognition models on the high-resolution sonar dataset SCTD. The recognition accuracy of each model is depicted in Figure 8.
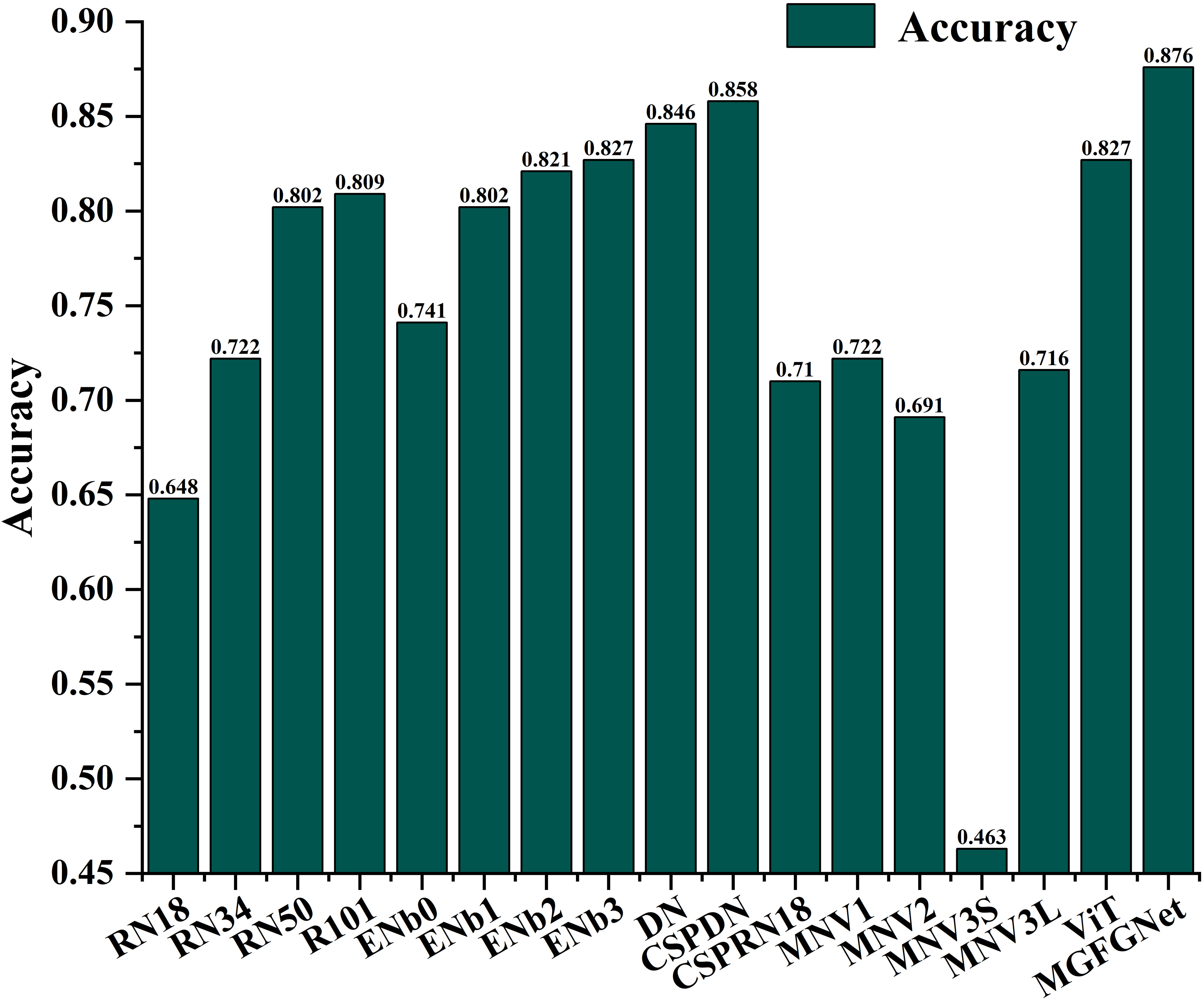
Figure 8 Details of the recognition Accuracy of the model on the SCTD dataset.
Clearly, MGFGNet’s recognition rate continues to surpass that of all other models, confirming the model’s scalability. Due to the interference of underwater background noise, which results in poor separability between targets and background in sonar images (Huang and Yang, 2022), the multi-gradient flow model proposed in MGFGNet, based on CSPNet and MHSA, enhances the model’s attention to targets (Wang et al., 2020; Han et al., 2021), ensuring the retention of a substantial amount of relevant target information during the feature extraction process. Additionally, further feature enhancement and fusion through CAFM contribute to an improved distinction between target foreground and background, effectively enhancing the model’s recognition accuracy.
It is noteworthy that, as indicated in the performance and parameter analysis in Section 4.2, under the same model architecture, depth and recognition rate exhibit a proportional relationship in underwater sonar image target recognition. For instance, the recognition rates of the ResNet series and EfficientNet series validate this conclusion. Conversely, lightweight models such as MobileNet perform poorly, with recognition rates not exceeding 73%, once again confirming that MobileNet is not well-suited for underwater acoustic target recognition scenarios.
Due to the challenges associated with acquiring underwater acoustic datasets, the currently available open datasets are primarily limited to two ship radiated noise datasets: Deepship and ShipsEar. Given that the ShipsEar dataset comprises multiple ship types within each category and has a limited data volume, we conducted experiments with a substantial sample dataset extracted from Deepship to examine MGFGNet’s recognition accuracy in relation to dataset size and to identify potential computational bottlenecks. This dataset, which was subject to preprocessing, included a total of 33,693 samples. Figure 9 presents the model accuracy of MGFGNet for various training set sizes sourced from Deepship.
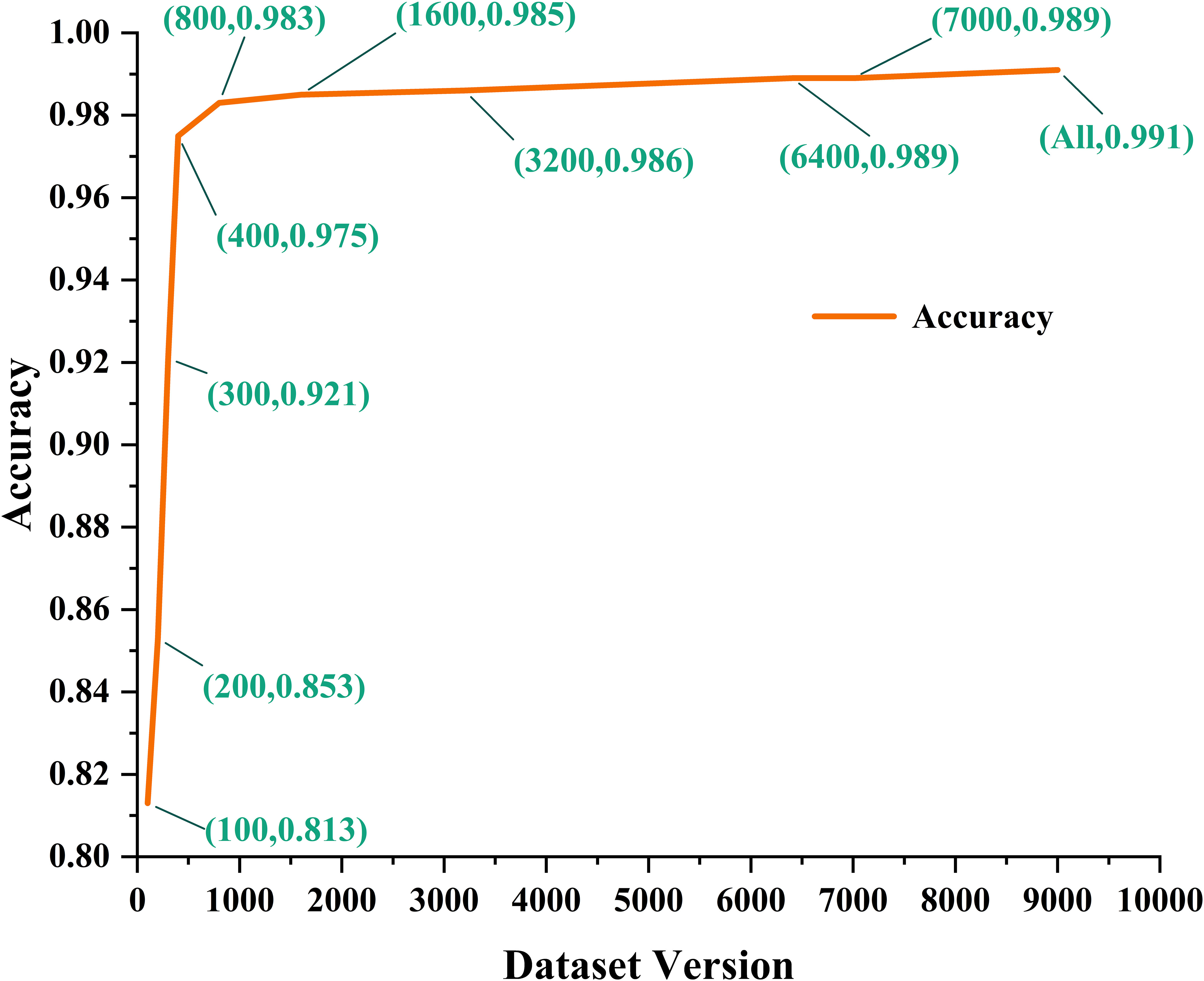
Figure 9 Details of the recognition Accuracy of the model on different versions of the Deepship dataset.
The numerical values in the dataset version indicate the quantity of samples randomly chosen from each category in the Deepship dataset to form the training set for model training, while the test set configuration remained consistent with that presented in Table 2. The results clearly show that as the training set sizes for each category range from 100 to 800, the network model’s recognition accuracy experiences rapid growth. Beyond the 800 mark, recognition accuracy tends to plateau, although there is still noticeable improvement as the dataset size increases. Importantly, no indications of encountering computational bottlenecks were observed.
An underwater acoustic object identification model MGFGNet based on multi-gradient flow global feature enhancement network is raised in this article. Firstly, by embedding feature extraction module into the target recognition network, the whole target recognition network forms an end-to-end model with underwater acoustic signal as input and classification result as output. Secondly, the invention of Muti-grad block uses multi-gradient flow network to obtain underwater acoustic signal features quickly and effectively, reducing the quantity of model parameters and feature extraction time. Then the CAFM module is used for multi-dimensional feature fusion and feature enhancement to improve the effective characteristic weight of underwater sound. Finally, the Taylor-MCE Loss function is introduced, which enhances model recognition accuracy and mitigates sample imbalance issues within the binary cross-entropy loss. This is achieved by incorporating low-order perturbation terms into the binary cross-entropy loss to suppress sample imbalance components. Consequently, the multi-class classification task is transformed into a set of independent binary classification tasks, effectively addressing the problem of dataset sample imbalance and improving model recognition performance.
The experimental results show that on the Deepship and ShipsEar underwater acoustic data sets, the feature extraction and fusion methods raised in this article have better ability to represent the original underwater acoustic signals. Compared with mainstream underwater acoustic target recognition models such as ResNet and EfficientNet, the recognition accuracy of MGFGNet was greatly improved, and the inference time was greatly reduced. MGFGNet network has simple structure and few parameters, which can meet the requirements of end-to-end high precision and low latency in underwater acoustic target identification.
The experimental results of the model proposed in this article have the following potential implications for current underwater target recognition models:
Firstly, our feature extraction and fusion methods have demonstrated that traditional spectrogram-based feature extraction methods are better suited for representing the raw underwater acoustic features. This suggests that current methods for extracting underwater target features, such as those based on signal analysis and bio-inspired features, can be effectively combined with computer vision’s feature enhancement techniques (e.g., channel and spatial feature enhancement methods) to further enhance feature representation.
Secondly, the design and experimentation with the Multi-grad block in our proposed classifier have shown that multi-gradient flow networks can better extract deep abstract features of the model while reducing the number of model parameters. This enables underwater target recognition models to depart from the mainstream design pattern of extracting effective features for underwater targets solely through convolution and residual network stacking.
Furthermore, the design of the CAFM in our proposed classifier has demonstrated that incorporating feature fusion and enhancement modules before the classification module in the classifier can significantly enhance the model’s recognition accuracy. This enhancement may be related to feature loss during the extraction of effective features before classification and the numerical loss during the normalization process, as this process lacks specific loss control. This can lead to similarities between foreground and background values, making it difficult for the model to effectively recognize the target foreground. Subsequent research can focus on designing feature fusion and feature enhancement modules to improve the distinguishability between target foreground and background.
Lastly, the loss function designed in this paper was explored using the Taylor series, revealing factors influencing the loss function’s functionality, such as lateral shifting to address sample imbalance and boosting model recognition accuracy through low-order terms in the Taylor expansion of the function. This enables future research to introduce fewer hyperparameters while gaining more benefits, providing a reference for subsequent studies and better explaining the underlying physical meaning of the loss function.
Additionally, the experimental results of the model proposed in this paper open up potential avenues for future research:
1. Deep learning-based underwater target recognition models have encountered certain bottlenecks, primarily due to their reliance on convolution and residual network stacking, which can lead to limitations in accuracy. The model design approach presented in this paper transforms traditional underwater target recognition into underwater image target recognition, broadening the model construction methods. In the future, lightweight module design methods from computer vision and ideas for feature enhancement and fusion based on the characteristics of underwater feature images can be introduced to enhance the model’s efficiency and recognition accuracy, enabling real-time applications.
2. Existing underwater target recognition models mainly employ multi-class classification, but empirical evidence suggests that converting traditional multi-class tasks into multiple binary classification tasks is more suitable for underwater target recognition. Therefore, future research can delve into designing more effective underwater target recognition models based on multiple binary classification tasks that align with the physical characteristics of underwater sound.
3. Current research primarily focuses on building underwater target recognition models, with limited attention to loss function research. Traditional classification loss functions are primarily designed for object image classification and may not be highly adaptable to underwater target feature. Future research can focus on designing loss functions that better align with underwater target features based on the physical characteristics of underwater targets.
The original contributions presented in the study are included in the article/supplementary material. Further inquiries can be directed to the corresponding author.
JT: Conceptualization, Data curation, Formal Analysis, Funding acquisition, Investigation, Methodology, Project administration, Resources, Software, Validation, Visualization, Writing – original draft, Writing – review & editing. ZC: Writing – original draft, Writing – review & editing. HQ: Funding acquisition, Writing – original draft. MC: Methodology, Supervision, Writing – review & editing.
The author(s) declare financial support was received for the research, authorship, and/or publication of this article. This research was funded by the Special Program of Guangxi Science and Technology Base and Talents, grant number AD21220098, the Guangxi Natural Science Foundation, grant number 2022GXNSFDA035070, and the Innovation Project of Guangxi Graduate Education, grant number YCSW2023329.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Aggarwal A., Srivastava A., Agarwal A., Chahal N., Singh D., Alnuaim A. A., et al. (2022). Two-way feature extraction for speech emotion recognition using deep learning. Sensors 22 (6), 2378. doi: 10.3390/s22062378
Ahmed M. S., Aurpa T. T., Azad M. A. K. (2022). Fish disease detection using image-based machine learning technique in aquaculture. J. King Saud University-Computer Inf. Sci. 34 (8), 5170–5182. doi: 10.1016/j.jksuci.2021.05.003
Ali S., Iqbal N., Hafeez Y. (2018). Towards requirement change management for global software development using case base reasoning. Mehran Univ. Res. J. Eng. Technol. 37, 639–652. doi: 10.22581/muet1982.1803.17
Boyd C. E., McNevin A. A., Davis R. P. (2022). The contribution of fisheries and aquaculture to the global protein supply. Food Secur. 14 (3), 805–827. doi: 10.1007/s12571-021-01246-9
Bradley D., Merrifield M., Miller K. M., Lomonico S., Wilson J. R., Gleason M. G. (2019). Opportunities to improve fisheries management through innovative technology and advanced data systems. Fish. Fish. 20 (3), 564–583. doi: 10.1111/faf.12361
Darapaneni N., Sreekanth S., Paduri A. R., Roche A. S., Murugappan V., Singha K. K., et al. (2022). “AI based farm fish disease detection system to help micro and small fish farmers,” in 2022 Interdisciplinary Research in Technology and Management (IRTM) (Kolkata, India: IEEE), 1–5.
Di N., Sharif M. Z., Hu Z., Xue R., Yu B. (2023). Applicability of VGGish embedding in bee colony monitoring: comparison with MFCC in colony sound classification. PeerJ 11, e14696. doi: 10.7717/peerj.14696
Domingos L. C., Santos P. E., Skelton P. S., Brinkworth R. S., Sammut K. (2022). An investigation of preprocessing filters and deep learning methods for vessel type classification with underwater acoustic data. IEEE Access 10, 117582–117596. doi: 10.1109/ACCESS.2022.3220265
Dosovitskiy A., Beyer L., Kolesnikov A., Weissenborn D., Zhai X., Unterthiner T., et al. (2020). An image is worth 16x16 words: Transformers for image recognition at scale. ArXiv abs/2010.11929. doi: 10.48550/arXiv.2010.11929
Gao X., Xie J., Chen Z., Liu A. A., Sun Z., Lyu L. (2023). Dilated convolution-based feature refinement network for crowd localization. ACM Trans. Multimedia Computing Commun. Appl. 19 (6), 1–16. doi: 10.1145/3571134
Gladju J., Kamalam B. S., Kanagaraj A. (2022). Applications of data mining and machine learning framework in aquaculture and fisheries: A review. Smart Agric. Technol. 2, 100061. doi: 10.1016/j.atech.2022.100061
Gonzalez S., Miikkulainen R. (2021). “Optimizing loss functions through multi-variate taylor polynomial parameterization,” in Proceedings of the Genetic and Evolutionary Computation Conference. (Lille, France: ACM) 305–313. doi: 10.1145/3449639.3459277
Han K., Xiao A., Wu E., Guo J., Xu C., Wang Y. (2021). Transformer in transformer. Adv. Neural Inf. Process. Syst. 34, 15908–15919. doi: 10.48550/arXiv.2103.00112
Han R., Jia N., Huang J., Guo S. (2022). Joint time-frequency domain equalization of MSK signal over underwater acoustic channel. Appl. Acoustics 189, 108597. doi: 10.1016/j.apacoust.2021.108597
He K., Zhang X., Ren S., Sun J. (2016). “Deep residual learning for image recognition,” in Proceedings of the IEEE conference on computer vision and pattern recognition. (Las Vegas, USA: IEEE) 770–778. doi: 10.1109/CVPR.2016.90
Ho Y., Wookey S. (2019). The real-world-weight cross-entropy loss function: Modeling the costs of mislabeling. IEEE Access 8, 4806–4813. doi: 10.1109/ACCESS.2019.2962617
Hong F., Liu C., Guo L., Chen F., Feng H. (2021). Underwater acoustic target recognition with a residual network and the optimized feature extraction method. Appl. Sci. 11, 1442. doi: 10.3390/app11041442
Hou Q., Zhou D., Feng J. (2021). “Coordinate attention for efficient mobile network design,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 13713–13722. doi: 10.1109/CVPR46437.2021.01350
Howard A., Sandler M., Chu G., Chen L. C., Chen B., Tan M., et al. (2019). Searching for mobilenetv3. Proc. IEEE/CVF Int. Conf. Comput. Vision (Seoul, Korea: IEEE), 1314–1324. doi: 10.1109/ICCV.2019.00140
Howard A. G., Zhu M., Chen B., Kalenichenko D., Wang W., Weyand T., et al. (2017). Mobilenets: Efficient convolutional neural networks for mobile vision applications. ArXiv. abs/1704.04861. doi: 10.48550/arXiv.1704.04861g
Hu J., Shen L., Sun G. (2018). “Squeeze-and-excitation networks,” in Proceedings of the IEEE conference on computer vision and pattern recognition. (Utah, USA: IEEE) 7132–7141. doi: 10.1109/CVPR.2018.00745
Hu W. C., Chen L. B., Huang B. K., Lin H. M. (2022). A computer vision-based intelligent fish feeding system using deep learning techniques for aquaculture. IEEE Sens J. 22 (7), 7185–7194. doi: 10.1109/JSEN.2022.3151777
Huang P., Yang P. (2022). Synthetic aperture imagery for high-resolution imaging sonar. Front. Mar. Sci 9, 1049761. doi: 10.3389/fmars.2022.1049761
Huang C., Yang K., Yang Q., Zhang H. (2021). Line spectrum extraction based on autoassociative neural networks. JASA Express Lett. 1, 016003. doi: 10.1121/10.0003038
Iandola F., Moskewicz M., Karayev S., Girshick R., Darrell T., Keutzer K. (2014). Densenet: Implementing efficient convnet descriptor pyramids. ArXiv.abs/1404.1869. doi: 10.48550/arXiv.1404.1869
Irfan M., Jiangbin Z., Ali S., Iqbal M., Masood Z., Hamid U. (2021). DeepShip: An underwater acoustic benchmark dataset and a separable convolution based autoencoder for classification. Expert Syst. Appl. 183, 115270. doi: 10.1016/j.eswa.2021.115270
Ji F., Ni J., Li G., Liu L., Wang Y. (2023). Underwater acoustic target recognition based on deep residual attention convolutional neural network. J. Mar. Sci. Eng. 11, 1626. doi: 10.3390/jmse11081626
Jin A., Zeng X. (2023). A novel deep learning method for underwater target recognition based on res-dense convolutional neural network with attention mechanism. J. Mar. Sci. Eng. 11, 69. doi: 10.3390/jmse11010069
Koonce B. (2021). Convolutional Neural Networks with Swift for Tensorflow: Image Recognition and Dataset Categorization (Berkeley (CA): Apress).
Koparan C., Koc A. B., Privette C. V., Sawyer C. B. (2018). In situ water quality measurements using an unmanned aerial vehicle (UAV) system. Water 10 (3), 264. doi: 10.3390/w10030264
Kritzer J. P. (2020). Influences of at-sea fishery monitoring on science, management, and fleet dynamics. Aquacult Fisheries 5 (3), 107–112. doi: 10.1016/j.aaf.2019.11.005
Leng Z., Tan M., Liu C., Cubuk E. D., Shi X., Cheng S., et al. (2022). Polyloss: A polynomial expansion perspective of classification loss functions. ArXiv. abs/2204.12511. doi: 10.48550/arXiv.2204.12511
Li Y., Gao P., Tang B., Yi Y., Zhang J. (2022). Double feature extraction method of ship-radiated noise signal based on slope entropy and permutation entropy. Entropy 24, 22. doi: 10.3390/e24010022
Li J., Wang B., Cui X., Li S., Liu J. (2022). Underwater acoustic target recognition based on attention residual network. Entropy 24, 1657. doi: 10.3390/e24111657
Li B., Yao Y., Tan J., Zhang G., Yu F., Lu J., et al. (2022). “Equalized focal loss for dense long-tailed object detection,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 6990–6999.
Li C., Yuan X., Lin C., Guo M., Wu W., Yan J., et al. (2019). “Am-lfs: Automl for loss function search,” in Proceedings of the IEEE/CVF International Conference on Computer Vision. (Seoul, South Korea: IEEE) 8410–8419. doi: 10.1109/ICCV.2019.00850
Lim L. W. K. (2022). Implementation of artificial intelligence in aquaculture and fisheries: deep learning, machine vision, big data, internet of things, robots and beyond. J. Comput. Cogn. Eng, 1–7. doi: 10.47852/bonviewJCCE3202803
Lim K., Whye L. (2023). Blended Learning in Animal Biotechnology during Pre-COVID-19, COVID-19 and Post COVID-19 Recovery Phase Periods across the Globe: a Step Forward or Backward? Int. J. Zool. Anim. Biol. 6 (2), 1–5. doi: 10.23880/izab-16000451
Lin T. Y., Goyal P., Girshick R., He K., Dollár P. (2017). “Focal loss for dense object detection,” in Proceedings of the IEEE international conference on computer vision. (Venice, Italy: IEEE), 2980–2988. doi: 10.1109/ICCV.2017.324
Lin S., Zheng H., Han B., Li Y., Han C., Li W. (2022). Comparative performance of eight ensemble learning approaches for the development of models of slope stability prediction. Acta Geotech. 17, 1477–1502. doi: 10.1007/s11440-021-01440-1
Linka K., Kuhl E. (2023). A new family of Constitutive Artificial Neural Networks towards automated model discovery. Comput. Methods Appl. Mechanics Eng. 403, 115731. doi: 10.1016/j.cma.2022.115731
Liu Z., Peng D., Zuo M. J., Xia J., Qin Y. (2022). Improved Hilbert–Huang transform with soft sifting stopping criterion and its application to fault diagnosis of wheelset bearings. ISA Trans. 125, 426–444. doi: 10.1016/j.isatra.2021.07.011
Ma Y., Liu M., Zhang Y., Zhang B., Xu K., Zou B., et al. (2022). Imbalanced underwater acoustic target recognition with trigonometric loss and attention mechanism convolutional network. Remote Sens. 14, 4103. doi: 10.3390/rs14164103
Mateo C., Talavera J. A. (2020). Bridging the gap between the short-time Fourier transform (STFT), wavelets, the constant-Q transform and multi-resolution STFT. Signal Image Video Process. 14, 1535–1543. doi: 10.1007/s11760-020-01701-8
Nouhaila B., Taoufiq B. D., Benayad N. (2022). An intelligent approach based on the combination of the discrete wavelet transform, delta delta MFCC for Parkinson’s disease diagnosis. Int. J. Adv. Comput. Sci. Appl. 13 (4), 562–571. doi: 10.14569/IJACSA.2022.0130466
Ruby U., Yendapalli V. (2020). Binary cross entropy with deep learning technique for image classification. Int. J. Adv. Trends Comput. Sci. Eng. 9 (4), 5393–5397. doi: 10.30534/ijatcse/2020/175942020
Sandler M., Howard A., Zhu M., Zhmoginov A., Chen L. C. (2018). “Mobilenetv2: Inverted residuals and linear bottlenecks,” in Proceedings of the IEEE conference on computer vision and pattern recognition. (Salt Lake City, USA: IEEE) 4510–4520. doi: 10.1109/CVPR.2018.00474
Santos-Domínguez D., Torres-Guijarro S., Cardenal-López A., Pena-Gimenez A. (2016). ShipsEar: An underwater vessel noise database. Appl. Acoustics 113, 64–69. doi: 10.1016/j.apacoust.2016.06.008
Setiyowati H., Thalib S., Setiawati R., Nurjannah N., Akbariani N. V. (2022). An aquaculture disrupted by digital technology. Austenit 14 (1), 12–16. doi: 10.5281/zenodo.6499775
Singh P., Waldekar S., Sahidullah M., Saha G. (2022). Analysis of constant-Q filterbank based representations for speech emotion recognition. Digital Signal Process. 130, 103712. doi: 10.1016/j.dsp.2022.103712
Tian C., Zheng M., Zuo W., Zhang B., Zhang Y., Zhang D. (2023). Multi-stage image denoising with the wavelet transform. Pattern Recognition 134, 109050. doi: 10.1016/j.patcog.2022.109050
Wang M., Huang P. (2023). A multireceiver SAS imaging algorithm and optimization. IEEE Access 11, 75112–75120. doi: 10.1109/ACCESS.2023.3297138
Wang C. Y., Liao H. Y. M., Wu Y. H., Chen P. Y., Hsieh J. W., Yeh I. H. (2020). “CSPNet: A new backbone that can enhance learning capability of CNN,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. (Virtual: IEEE) 390–391. doi: 10.1109/CVPRW50498.2020.00203
Wang Z., Wang Z., Zeng C., Yu Y., Wan X. (2023). High-quality image compressed sensing and reconstruction with multi-scale dilated convolutional neural network. Circuits Systems Signal Process. 42 (3), 1593–1616. doi: 10.1007/s00034-022-02181-6
Wang Q., Zeng X. Y. (2015). Deep learning methods and their applications in underwater targets recognition. Tech. Acoust 34, 138–140.
Wang B., Zhang W., Zhu Y., Wu C., Zhang S. (2023). An underwater acoustic target recognition method based on AMNet. IEEE Geosci. Remote Sens. Lett. 20, 1–5. doi: 10.1109/LGRS.2023.3235659
Wu Y., Duan Y., Wei Y., An D., Liu J. (2022). Application of intelligent and unmanned equipment in aquaculture: A review. Comput. Electron. Agric. 199, 107201. doi: 10.1016/j.compag.2022.107201
Xiao X., Wang W., Ren Q., Gerstoft P., Ma L. (2021). Underwater acoustic target recognition using attention-based deep neural network. JASA Express Lett. 1 (10), 106001. doi: 10.1121/10.0006299
Xu J., Huang Z., Li C. (2019). Advances in underwater target passive recognition using deep learning. J. Signal Process. 35, 1460–1475. doi: 10.16798/j.issn.1003-0530.2019.09.003
Yang P. (2023). An imaging algorithm for high-resolution imaging sonar system. Multimedia Tools Appl. doi: 10.1007/s11042-023-16757-0
Yang H., Xu G., Li J., Shen S., Yao X. (2019). Summary of passive underwater acoustic target recognition. Unmanned Syst. Technol. 2, 1–7.
Yang S., Xue L., Hong X., Zeng X. (2023). A lightweight network model based on an attention mechanism for ship-radiated noise classification. J. Mar. Sci. Eng. 11, 432. doi: 10.3390/jmse11020432
Yao Q., Wang Y., Yang Y. (2023). Underwater acoustic target recognition based on data augmentation and residual CNN. Electronics 12, 1206. doi: 10.3390/electronics12051206
Yao X., Yang H., Sheng M. (2023). Automatic modulation classification for underwater acoustic communication signals based on deep complex networks. Entropy 25, 318. doi: 10.3390/e25020318
Zhang X. (2023). An efficient method for the simulation of multireceiver SAS raw signal. Multimedia Tools Appl. doi: 10.1007/s11042-023-16992-5
Zhang R., He C., Jing L., Zhou C., Long C., Li J. (2023). A modulation recognition system for underwater acoustic communication signals based on higher-order cumulants and deep learning. J. Mar. Sci. Eng. 11, 1632. doi: 10.3390/jmse11081632
Zhou Y., Chen S.-c., Wu K., Ning M.-q., Chen H.-k., Zhang P. (2021). SCTD 1.0:Sonar common target detection dataset. Comput. Sci. 48 (11A), 334–339. doi: 10.11896/jsjkx.210100138
Zhou C., Wu Y., Fan Z., Zhang X., Wu D., Tao Z. (2022). Gammatone spectral latitude features extraction for pathological voice detection and classification. Appl. Acoustics 185, 108417. doi: 10.1016/j.apacoust.2021.108417
Zhu C., Cao T., Chen L., Dai X., Ge Q., Zhao X. (2023). High-order domain feature extraction technology for ocean acoustic observation signals: a review. IEEE Access 11, 17665–17683. doi: 10.1109/ACCESS.2023.3244782
Zhu X., Dong H., Rossi P. S., Landrø M. (2022). Time-frequency fused underwater acoustic source localization based on contrastive predictive coding. IEEE Sens J. 22, 13299–13308. doi: 10.1109/JSEN.2022.3179405
Keywords: underwater acoustic target recognition, underwater acoustic signal processing, feature enhancement, deep learning, feature fusion
Citation: Chen Z, Tang J, Qiu H and Chen M (2023) MGFGNet: an automatic underwater acoustic target recognition method based on the multi-gradient flow global feature enhancement network. Front. Mar. Sci. 10:1306229. doi: 10.3389/fmars.2023.1306229
Received: 03 October 2023; Accepted: 13 November 2023;
Published: 12 December 2023.
Edited by:
Xuebo Zhang, Northwest Normal University, ChinaReviewed by:
Zhichao Lv, Shandong University of Science and Technology, ChinaCopyright © 2023 Chen, Tang, Qiu and Chen. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Jianxun Tang, YWxpb0BtYWlscy5ndWV0LmVkdS5jbg==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.