 Irfan Ahmad
Irfan Ahmad Taj Rahman1
Taj Rahman1 Inayat Khan
Inayat Khan Salman Jan
Salman Jan Shahrulniza Musa
Shahrulniza Musa M. Irfan Uddin
M. Irfan Uddin
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Mar. Sci. , 15 November 2022
Sec. Ocean Observation
Volume 9 - 2022 | https://doi.org/10.3389/fmars.2022.1030113
This article is part of the Research Topic Optics and Machine Vision for Marine Observation View all 25 articles
Underwater Wireless Sensor Networks (UWSNs) are the most crucial method for exploring the hidden resources under the water. It enables many underwater applications, such as military, commercial, disaster prevention, ocean sampling, and other emergencies. Data transmission through a single relay node creates a hotspot, which will minimize the network lifetime and reduce the network reliability. Therefore, the cooperative technique is essential for transferring data between the source and the destination. This research proposes an improved version of Reliability and Adaptive Cooperation for Efficient (RACE), a well-known cooperative routing protocol for UWSNs known as RACE-SM. RACE-SM solved the single relay node issues by using the sink mobility scheme. All sensor nodes transfer data directly to the sink node if the sink node is in the communication range. Otherwise, sensor nodes use the cooperative combining strategies scheme to send the data from the source to the destination or sink node. The performance of the proposed method is then compared with the current protocols. The simulation results show that the RACE-SM outperforms in average up to 40.60%, 59%, 278%, and 77% than current protocols in terms of alive nodes, energy consumption, packet delivery ratio (PDR), and end-to-end delay respectively.
Around 75% of the Earth’s surface is covered by water. There are multiple applications for underwater sensor networks (UWSNs), such as oil and gas, various types of mines, sea surveillance, etc. (Nayyar et al., 2018; Ahmad et al., 2022). Approximately 10% of the total ocean volume has been explored throughout human history (Nayyar et al., 2019; Ahmad et al., 2021).
In UWSNs, many sensor nodes are available in the network (Erol et al., 2007; Raj Priyadarshini and Sivakumar, 2020). These nodes are responsible for sensing the data and forwarding it to the sink node or base station. The data packets received at the sink node then proceed to multiple applications. The accuracy of data packets received at the sink node depends on error-free communication. Radio waves are primarily not used for communication in UWSNs environments because they are easily affected by water (Teekaraman et al., 2019). Instead of radio waves, UWSNs use acoustic waves for communication due to their best performance. There is multiple uniqueness between the UWSNs and underwater acoustic networks in terms of scalability, flexibility, and localization (Nayyar and Balas, 2019; Anwar et al., 2021).
One of the significant concerns in UWSNs is reducing energy consumption. The node battery replacement is challenging due to the UWSN’s nature. However, the researchers are focusing on designing innovative routing schemes to have error-free communication and a better network lifetime. When designing the routing protocol, it’s essential to identify the minimum power of the node battery, transmission loss, and packet delivery ratio (Teekaraman et al., 2019; John et al., 2020; Zeb et al., 2022). The sink mobility technique is the best way to reduce the energy consumption in UWSNs. In this method, sink nodes move around the predefined area and collect the data from the sensor nodes.
Network reliability is another of the most critical challenges for underwater communication. The cooperative routing technique is the most reliable way to achieve network reliability. Cooperative routing routes data through a multihop system to ensure network reliability (Shah et al., 2018; Yahya et al., 2019; Mhemed et al., 2021; Zeb et al., 2022). The cooperative strategy also helps decrease the channel effects and provides reliable data transmission to the sink node.
There are many problems that UWSNs are faced with them now a days such as replacement of sensor node battery, propagation delay, limited bandwidth, and minimizing energy consumption. and charging the UWSNs deployed sensors are very difficult in real environments. Data forwarding through multiple nodes from source to destination is better to solve the network reliability issues. Still, the latency will be high due to various nodes in the data processing. The existing Reliability and Adaptive Cooperation for Efficient UWSNs (RACE) uses a single hop method for data transmission. Using a single node for data transmission creates the hotspot. Therefore, the forwarder node drains energy quickly due to the continuous transmission of the data packets toward the sink, which will cause to minimize the network lifetime (Ahmed et al., 2016b).
Due to the aforementioned limitations, this research article introduces an enhanced version of RACE called Reliability and Adaptive Cooperation for Efficient UWSNs using sink mobility (RACE-SM). The proposed method transfers data to the sink node in two ways. First, when the sensor node detects the sink node, the communication range will transfer the data directly to the sink node instead of the multi-hopping method. Second, data are transmitted through the relay nodes. When the sink node is not in the communication range, the sensor nodes transfer the data to relay nodes and then to the sink node.
• To minimize the energy consumption, the RACE-SM scheme is developed for UWSNs in which data are transferred to the mobile sink directly rather than via a multi-hopping technique. The deployment area is partitioned into four portions for better performance and to avoid collision between the sink nodes. Sink nodes move around the specified area and collect the data from the sensor nodes.
• Consider the underwater channel modeling to reduce path, channel, and transmission losses, reducing the end-to-end delay.
• Single relay routing techniques reduce the reliability of the network. RACE-SM also uses the cooperative routing technique to improve the network’s reliability.
• The proposed routing scheme performance is evaluated through the MATLAB simulation tool, which shows the improvement in energy consumption, End–to–end delay, PDR, and number of alive nodes.
The rest of the article is prepared as follows: literature review discussed in section 2, section 3 discusses the proposed RACE-SM routing protocol, section 4 discusses the simulation results of the compared and proposed routing scheme, and finally, section 5 presents the conclusion of the work.
Energy Efficient Regional Base Cooperative Routing (EERBCR) protocol with the sink mobility technique has been proposed in (Gul et al., 2021). The authors’ main focus in this work is moving the sink node to the predefined path to gather the data from the sensor nodes. The basic concept in this research is to keep all the sensor devices in sleeping mode. When they receive the Hello packet from the sink nodes, it activates itself. When the sink moves from the specific region again, it will broadcast another message to inform the sensor nodes living in the area. The proposed protocol outperforms DEADS, DBR, and EEDBR routing protocols based on the experiment results. As network reliability and transmission loss are the key factors in data transmission, the authors do not discuss them in the mentioned protocol.
The solution for the problem of the hole coverage in Underwater Acoustic Sensor Networks (UWASN) has been proposed in (Raj Priyadarshini and Sivakumar, 2020). The stated problem directly affects the currently active node threshold value limit, which causes node destruction. The authors improved the coverage and data transmission by introducing the simple value of those already known parameters. Moreover, due to the movement of water motions for some of the parameters like currents, winds, and waves, the topology will be changing. This paper is also limited to improving the network lifetime while transmission loss and end-to-end delay are not considered.
A new multi-layer routing protocol for discovering the best route and enhancing network lifetime, energy utilization, and End–to–end delay has been proposed in (Gomathi and Martin, 2018). The authors used the efficient discovery method to find the shortest path for data transmission. The simulation results show that the proposed routing protocol has performed better in all the above metrics but not good in network throughput.
The data retransmission to the failure node has been improved with the E2R2P routing protocol in (Anuradha and Srivatsa, 2019)—the essential work of the research on reducing energy consumption in UWSNs. The authors have enhanced data retransmission to those nodes that are already dead or unreachable due to any problem. As in the stated work, the computation has decreased. Therefore, the network lifetime and performance have been extended.
The energy consumption and path loss issue during the data transmission has been achieved with SPARCO (Stochastic Performance Analysis with Reliability and Cooperation) (Ahmed et al., 2016a). This protocol uses the cooperative routing technique. All the nodes are placed with a single Omni-directional antenna for signal broad-casting. The simulation results show that the mentioned routing protocol performed better than other routing protocols regarding transmission, path loss, and energy consumption.
The energy consumption due to the unnecessary hello packets has been controlled with a localization-free, energy-efficient, and link reliable (E2LR) routing protocol (Tariq et al., 2021). Furthermore, the E2LR routing protocol uses a composite metric for the forwarder hop selection to reduce the E2E delay and packet loss. The experiment results show that the stated routing protocol performed better energy usage during the data forwarding and information sharing phase than R-ERP2R and H2-DAB routing protocols. Moreover, the result also shows that the E2LR routing protocol performed better in terms of End–to–end delay, packet delivery ratio, and network lifetime than compared protocols.
The joint optimization framework of forward and hold mechanisms, sink mobility, data aggregation, and adoptive depth threshold (dth) for improving network lifetime, reducing energy consumption, increasing throughput, and reducing the propagation delay has been designed in (Latif et al., 2020). The authors performed the experiments in a 3-D underwater sensor network environment for better results displaying. The simulation results show that the proposed technique performs better in packet drop, network lifetime, and throughput than both iAMCTD and Mobicast routing schemes. Moreover, the simulation results show that the proposed routing scheme provides better performance for real-time delay intolerant applications over the existing algorithms.
A reliable and energy-efficient routing scheme named Energy Balanced Efficient and Reliable Routing (EBER) has been proposed (Wadud et al., 2019). The author focuses on the forwarding nodes and nodes’ energy to reduce energy conservation. Moreover, the authors deployed two sink nodes to decrease network latency in areas with high traffic burdens. The simulation results show that the WDFAD-DBR performed better in PDR, energy usage, and lesser duplicate packets than the EBER 2 routing protocol.
An energy-balanced routing strategy for underwater sensor networks has been proposed in (Bouabdallah et al., 2017). The main concept of this study is to study and overcome the problem of the holes and overcome energy consumption. The authors also worked on the transmission load redistribution for nodes during the communication between the source and destination nodes. The network lifetime is improved by solving the energy holes problem based on a result.
An efficient energy-gathering routing protocol for UWSNs has been proposed in (Banaeizadeh and Toroghi Haghighat, 2020). The authors have solved three issues in different steps in the stated routing protocol. Firstly, the energy usage issue is solved by combining the sensor nodes into other node groups managed by the sender node. The mentioned node will be responsible for gathering the data from their neighbors in one hope of communication. Secondly, the proposed MAC routing protocol has improved the packet loss and the collision in the way that the normal sensor nodes will send their data to the forwarder node on specific committed slots. Finally, the graph structure has decreased the data collision of the overall network. The simulation results, which are taken from the NS2 simulation, show that EEDG performed better in throughput, end-to-end delay, and energy consumption.
Energy and reliable routing protocols by the name Cooperative Effective Energy and Reliable Delivery (CoEERD) and Effective Energy and Reliable Delivery (EERD) have been proposed in (Ullah et al., 2019) to solve the reliability and adverse channel issues which cause packet corruption. In the first proposed routing protocol (EERD), the forwarder transfers the packets through a reliable path with less energy usage. Still, this routing protocol uses a single route for all the data transmitting, which interferes with the reliability of data packets because of the unpredictable environment. Therefore, the authors introduced the second routing protocol called CoEERD, which will use the cooperative routing technique for data transferring between the source and destination nodes. The relay node concept has been adopted for data forwarding from the sensor nodes to the sink nodes in the cooperative method. The simulation results show that the EERD and Co-EERD performed better in delay, reliable packet transfer, and energy usage than ODBR and CoDBR.
The fuzzy logic technique (FLT) improves (Bu et al., 2018) performance by selecting the best forwarder nodes based on energy information and node position factors. Interference between nodes can be reduced using this method. The use of remaining energy ratios (RERs) and the interference of the fuzzy logic techniques minimizes the energy required in the design, saving resources. There are many nodes in the network, and only one is chosen as a destination because it has the lowest position in terms of distance and the maximum amount of energy. The system introduces a slight lag, but it saves energy in the long run. While this increases throughput, it compromises network security by increasing the likelihood of data packet loss.
The authors in (Pappas et al., 2018) use two data collectors to facilitate random access to the IoT wireless network. When transmitting data packets via random access, nodes and aggregators are used. Data packets are slotted for transmission by the aggregators, who cooperate at the network level. Additionally, they allow for network scalability by providing throughput. As a result, they may have a finite waiting time. In addition, they aim to make IoT data collection easier. Aggregators add complexity to the system.
The researchers in (Javaid et al., 2017b) divide the network into three equal parts. An effective way to save energy and improve the ratio of transmitted packets is to divide the network. The method considers the sink’s horizontal and vertical movement, which aids in reducing packet losses. Nodes in the network use collaboration to forward data using the cooperative approach—these aids in achieving the highest possible RODP. The information is amplified and decoded by the RLN before being sent to the DSN. The BER is verified at each stop along the way when going from one node to another. The packet is successfully sent to its intended destination if the threshold value exceeds the BER value. The nodes are selected based on the cost function, and the network is built. Choosing a destination node depends on the lowest depth, SNR, and maximum residual energy. The protocol has a high RODP and extends the life of batteries at the same time.
In (Javaid et al., 2017a), the authors show two new ways to use less energy and prevent void zones from forming. The first strategy relies heavily on mobility sink nodes to reduce node energy usage. You’ll use routing in conjunction with the first method in the second method. By routing packets via many paths, the cooperative system improves network reliability. While packet loss improves in the second system, transmission delays grow as RODP increases, all at the cost of total energy use. The first method saves energy and ensures that the nodes stay up and running for a long time.
In (Ullah et al., 2019), the authors presented new wireless network routing algorithms based on multiple cognitive access. The methods used a cognitive multiple access technique to bypass traditional cooperation. Two new routing strategies have been introduced to help minimize the consumption of resources. As a result, the proposed protocols outperform more traditional forms of cooperation. The goals of the proposed solutions are to increase network throughput and keep the network stable. However, it has a significant energy cost and prolongs the response time.
A multi-hop transmission system is proposed in (Balaji et al., 2019). Data packets are transmitted from one device to another before being sent to the sink’s final destination. Fuzzy logic uses the cluster head to select the data packets going from the sender node to the sink. Three criteria are used in this approach: trust factor, current energy, and distance from the sink node. If there are more cluster heads between the sink and the cluster head, the cluster head uses a fuzzy logic technique to select the best cluster head for reaching the data. The optimal forwarding node must be chosen to elect the neighbor node closest to the sink. The high trust factor and sink node distance identify the best forwarding node. As a result of the protocol, the network’s overall lifetime and overhead are raised.
In (Liu et al., 2018), the authors suggest a protocol (RECRP) that does not require additional hardware to define the location. The optimal minimum-max technique dynamically controls trans-mission power and channel frequency parameters. It achieves energy efficiency through the use of two-hop forwarding capabilities. The protocol also has the advantage of preventing communication voids. This protocol uses less energy per node and reduces the end-to-end delay while maintaining a higher PDR than other methods.
The authors in (Mhemed et al., 2021) focused on reducing energy consumption, increasing network lifetime, and enhancing the packet delivery ratio. The authors used the void avoidance technique to achieve the mentioned task. The task has been accomplished, as shown in the simulation result, but reliability is the essential issue in networking and is not considered in the proposed protocol. To reduce energy consumption and maximize throughput, the authors (Yahya et al., 2019) used a single broadcasting antenna to transfer data between the source and distention. This paper also focuses on the single relay node selection for data transferring, which caused early death of the relay node due to the burden of sharing the other sensor nodes’ data with the sink node.
To address the high energy consumption and throughput, the authors of (Ahmed et al., 2016b) focused solely on the cooperative technique. Still, the limitation is that using the relay node for data transmission creates a hotspot, and the relay node will die quickly. This research work motivation is from work presented in (Ahmed et al., 2016a; Yahya et al., 2019; Mhemed et al., 2021), leading to issues such as using a single relay node end-to-end delay in achieving the network’s reliability. We introduce the RACE-SM routing protocol to increase the network’s lifetime and reliability and reduce transmission loss using the sink mobility technique.
The proposed RACE-SM routing protocol is briefly explained in this section. The RACE-SM is a cooperative routing scheme that reduces power consumption and keeps the network for a long-time.
A 1000m dimensions network with the 3D platform was developed. The simulation area is divided into four equal squares labeled Upper right square (URS), Upper left square (ULS), Bottom right (B.R.), and Bottom left (B.L.). Sink nodes (S.N.) move in a three-cornered path to gather data from the sensor nodes in each portion. Randomly installed nodes sense the characteristics and transform them into packets. So that they can be used in consequent processing steps, the data is sent to the Sink node. Each of the nodes has direct communication with the sink nodes. Acoustic waves communicate between nodes, and each node is equipped with an acoustic modem.
The position selection method for the autonomous under-water vehicle in (Cheng, 2005) is used to gather the sink node’s location information. The mobile sinks, which are GPS-enabled, are installed at the top of the water. The speed and time arrival of the acoustic waves are used to calculate the distance from these mobile sinks. We use the close distance to the sink nodes on the surface to get the coordinates, which tells us where the sink node is now located. The path initialization for sink nodes is designed to cover the whole network and select more nodes. SN1, SN2, SN3, and SN4 initiate their movements in their respective regions from the corner, mid-boundary, center, and center of the B.L as shows in Figure 1.
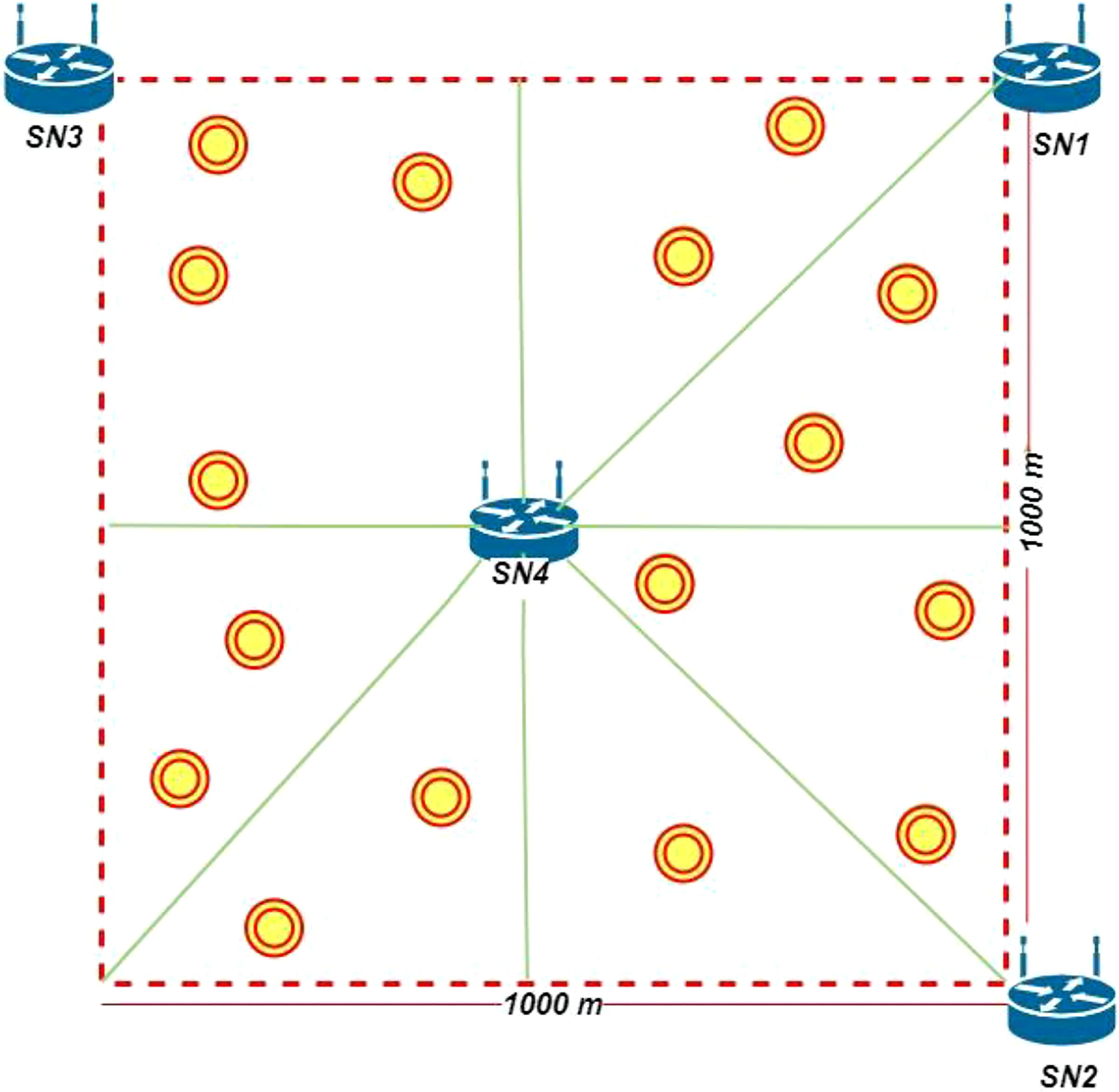
Figure 1 Proposed Network Model.
Due to interference and collisions, S.N. movement starts from a different location instead of the same point, guaranteeing that all the sink nodes must not come to the center simultaneously. The middle or center of the network is defined as below:
where( qm , wm ) , ( qm , wm ) and ( qi , wi ) consequently, the final, center, and initial points of the network.
The S.N. can move in three directions: horizontally, vertically, and diagonally. All S.N.s begin motion from their reference point and keep moving through the network along with a specified position.
The diagonal movements of all S.N. are mathematically indicated by shifting the predefined rom the current position (qc, wc) to ( qn , wn ) that is the new location:
To avoid collisions, when the S.N. reaches the network’s angle, it starts to move along the network’s border in either a vertical or horizontal direction. SN2 and SN4 move vertically, and SN1 and SN2 move horizontally. The Next coordinates for every S.N. are as follows:
To move vertically, S.N.s must be in the middle of a network, and their horizontal motions must be reversed to do so:
S.N.s are initially deployed at a specific location on the network, and afterward, they start to move along the specified route. As a result, how can one restrict an S.N.’s mobility in a network to follow a predetermined path? Is there any S.N. that doesn’t leave the network? How does an S.N. know where it is in the network when it changes directions? Since all S.N.s move in the same region, their memory includes information about the region’s coordinates to change their movement direction. Those are the corner, mid-boundary, and center of the network. It then compares its current coordinates with the stored ones when it steps forward.
The movement direction is changed if it equals one of the stored coordinates. Other than that, it continues to move on the same path. If fixed quantity o is added or subtracted, the S.N.s’ movement direction is defined. Suppose SN1 starts its movement from a network corner and moves horizontally. While on the next step, SN1 checks its current position with the saved coordinates. Whereas, when the current coordinates do not match any previously saved ones, they will continue to move in the exact directions.
To increase the x coordinate, the z-coordinate is increased to a permanent value while the coordinate persists the same. By adding the permanent value o to q, the SN1’s horizontal movement is noted and stops the SN1’s in the network. Also, when the q and w coordinates are equal to the middle point, only the w coordinate increases. Whenever the coordinate’s points are similar to the center coordinates, they move to the diagonal path. All S.N.s in the network must follow this same path.
The x and y values increment pushes the S.N. to follow the determined path to track it. A change in S.N. y and x coordinates determines a diagonal movement, while a difference only in the x or y coordinate specifies horizontal or vertical mobility for S.N. It is done by comparing the S.N.’s current position with the network’s center, corner, and mid-boundary coordinates, saved in its memory. When the S.N.’s current coordinates match the last numbers, it switches its route.
The currents in the water can cause the S.N. to deviate from its proposed route. When the S.N. moves forward, it calculates an error e, which keeps it on track. It is compared to the surface sinks’ estimated position value when an S.N. moves forward from its current location of (qc, wc) to the next position ( qn , wn ) to confirm the S.N.’s actual position and identify drifts. As soon as an S.N. moves forward, it compares its new position ( qn , wn ) including its original position (qc, wc) and discovers the error as follows e:
e should be equal to 0 if the ocean current does not interfere with the S.N.’s mobility. For example, if e has a negative or positive value, it will be added or subtracted, whether negative or positive. It’s calculated as follows in the case of a positive error:
It‘s calculated as follows in the case of a negative error:
For example, S.N. is at position (500m, 500m). It then moves to the following location (501m, 501m). There is no interference from the water currents in this case and, therefore, no error. A negative or positive value for e specifies that the S.N. has different from its path. It can be traced directly by subtracting or adding the error value when discovering the following position when the water currents disturb its function.
The reliability of the UWSNs channel is introduced to ignore the loss in transferring the data at the time of the outage channel. Our proposed work also emphasized the reliability of the link to achieve it. Multihop channels are formed by bringing together many links, creating a chain of sensor nodes that transmit data from one source to another and finally to the final destination. If all data is successfully sent, it will be regarded as a successful E2E transmission. E2E reliability R is used to express an occurrence likelihood of a case. Hence, R is written as follows (Ahmed et al., 2015):
where R is the function based on two nodes’ distance which is a point to point link, state of the channel and depth of the water, and the(d, f) describe the distance and frequency, respectively, S.L. is the source level, p is the probability, and E2E channel total reliability could be determined from the equation (18).
A Sink Node and a node establish a link before exchanging the data; every S.N. with a 150-meter transmission range broadcasts the info packet to establish the connection. As a part of this information packet, the S.N. and node I.D.s are included. The information packet received by a node indicates the presence of the S.N. within the node’s 150 m coverage range. The reception of an info packet indicates that a data exchange link has been established between S.N. and a node. If a node receives the information packet, the data are transferred with the S.N. any data received to S.N. is then transferred directly to the next S.N. or the surface sink node.
In contrast, SN3 and SN4 forward data to SN2 and SN1. It will be an additional load on other sensor nodes when transferring data through the multihop transmission to the surface. Data is directly received by S.N.s, which reduces the burden on nodes by transferring data directly from nodes to the surface. The S.N. transmits info packets to conserve the node’s energy because the network lifetime is reduced when a node sends an info packet. To send data packets to the sink node, the nodes that send the data must first look for the closest mobile Sink in its communication range, and if it finds one, it will send a packet of data directly to that mobile Sink.
Otherwise, packets are sent through a relay node to reach their destination (Shah et al., 2016). Two-step communication is performed between the Relay and S.N. First, the distance of neighbors and the source node in the transmission range is calculated with S.N.
Then, in the second phase the distance between all neighbors is compared, the nearest neighbor with the shortest distance is chosen as a gateway. So, the packets are sent to the S.N. in this manner. The S.N. transmission range is computed after a predetermined amount of time. Figures 2, 3 show both types of data forwarding, respectively.
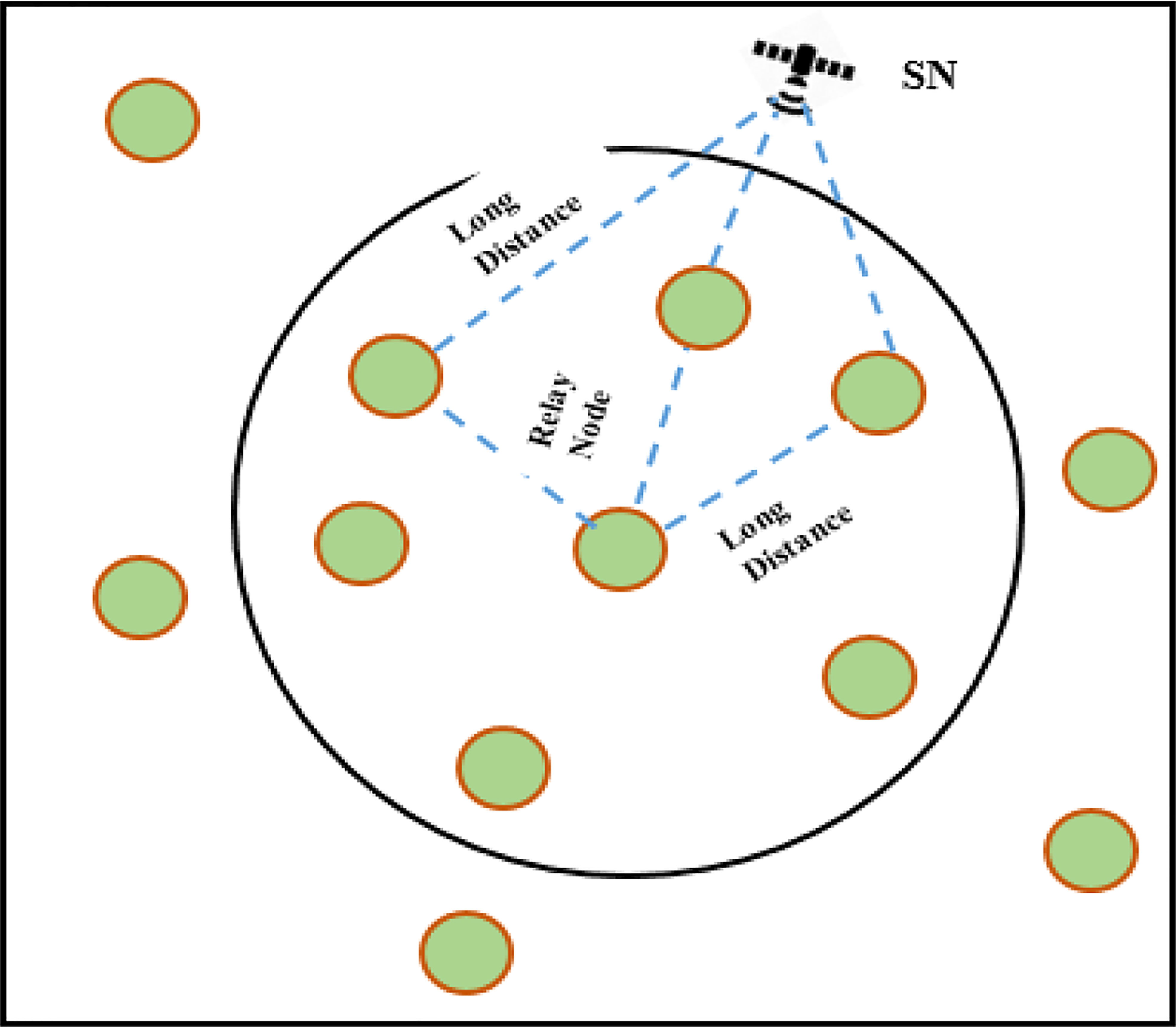
Figure 2 Packet transmission trough Relay node.
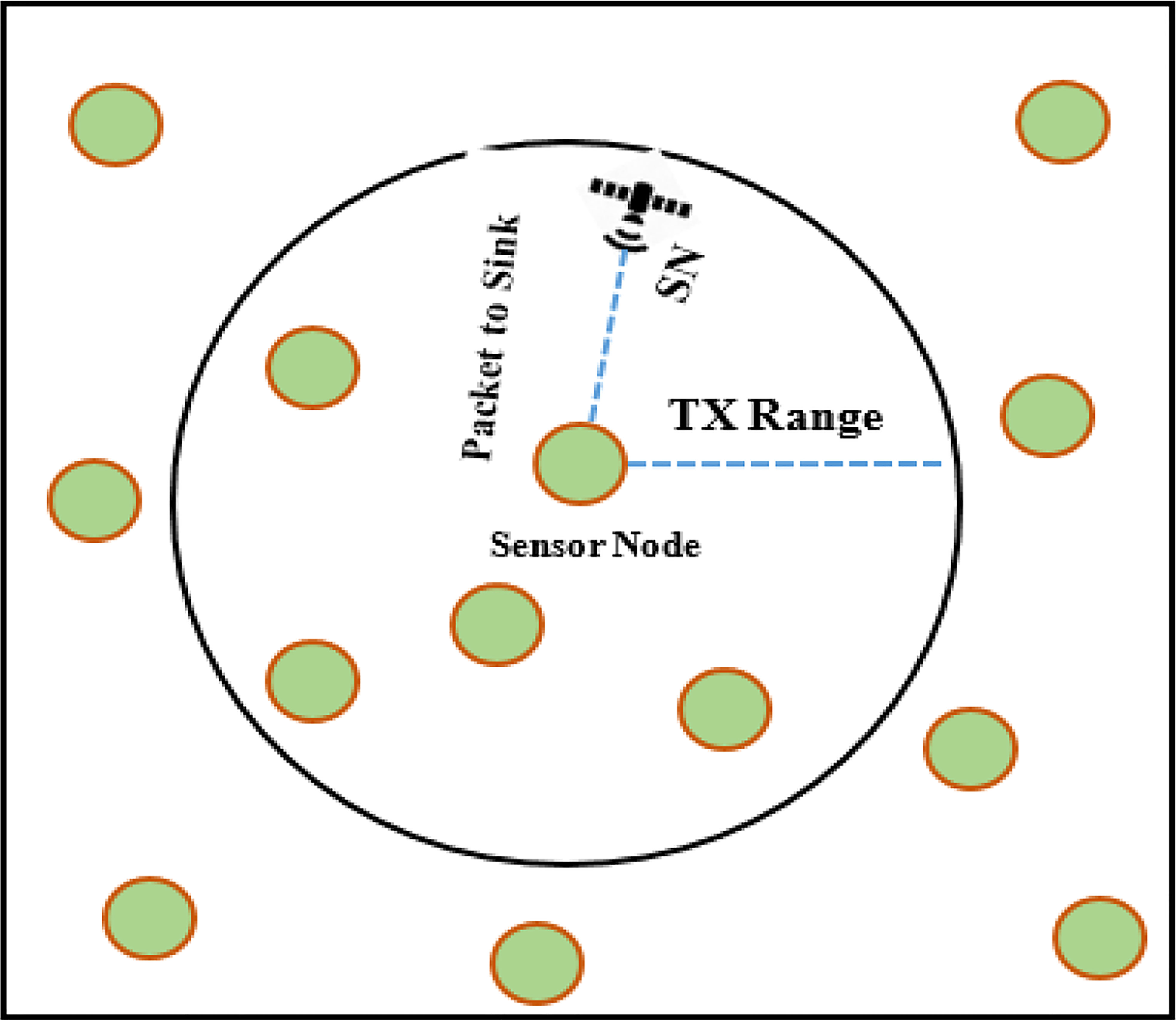
Figure 3 Direct Packet transmission SN.
Figure 4 shows a two-phase transmit system that lets the source node and the relay node communicate without interfering. Phase one and phase two make together with the entire working process. R represents the best relay node, S represents the source, and D represents the destination.
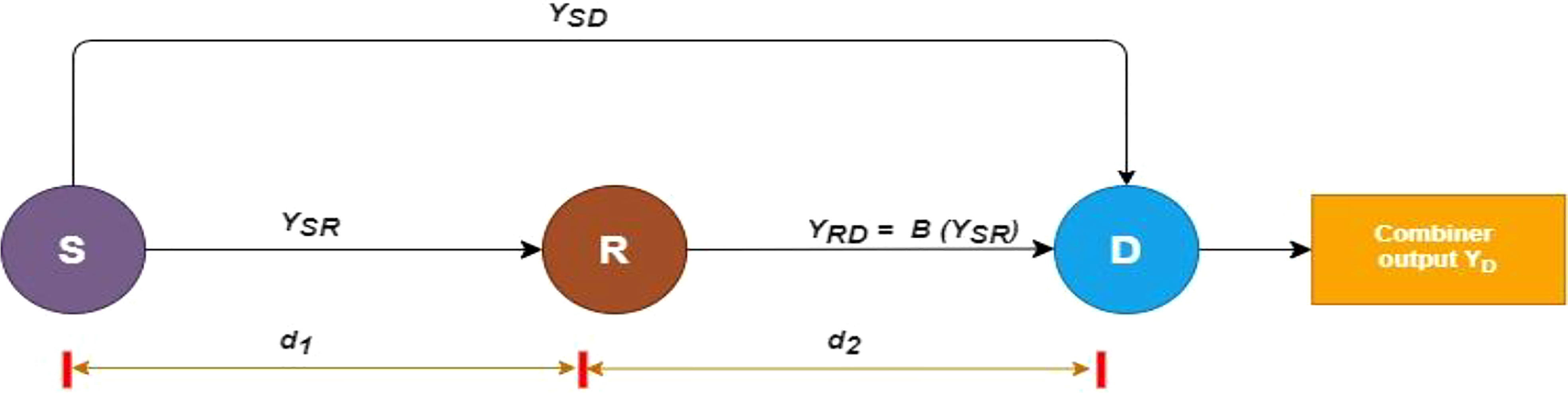
Figure 4 Three Sensor Node System M.
S transmits data to D and R simultaneously in the first stage, whereas R transmits the data received to n the other stage. The overall distance between the sender and sink node is d1 + d2, as indicated in Figure 3. At R and D, data from phase 1 transmission can be written as follows (Ahmed et al., 2015):
where hSD and hSR are the co-efficient of the channel, respectively, and xS is the symbol of sender information between the source to destination and source to relay, respectively. In the second processing stage, some received data from stage 1 Rb was retransmitted to D destination. Therefore the received data from the second stage can be represented as (Ahmed et al., 2015).
The source node receives data from the relay node using f as the function (ySR). There are three noise components in the links between source-relay (nSR), source-destination (nSD), and source-relay-destination (nRD). The flowchart in Figure 5 and Algorithm 1 explain the proposed RACE-SM routing protocol.
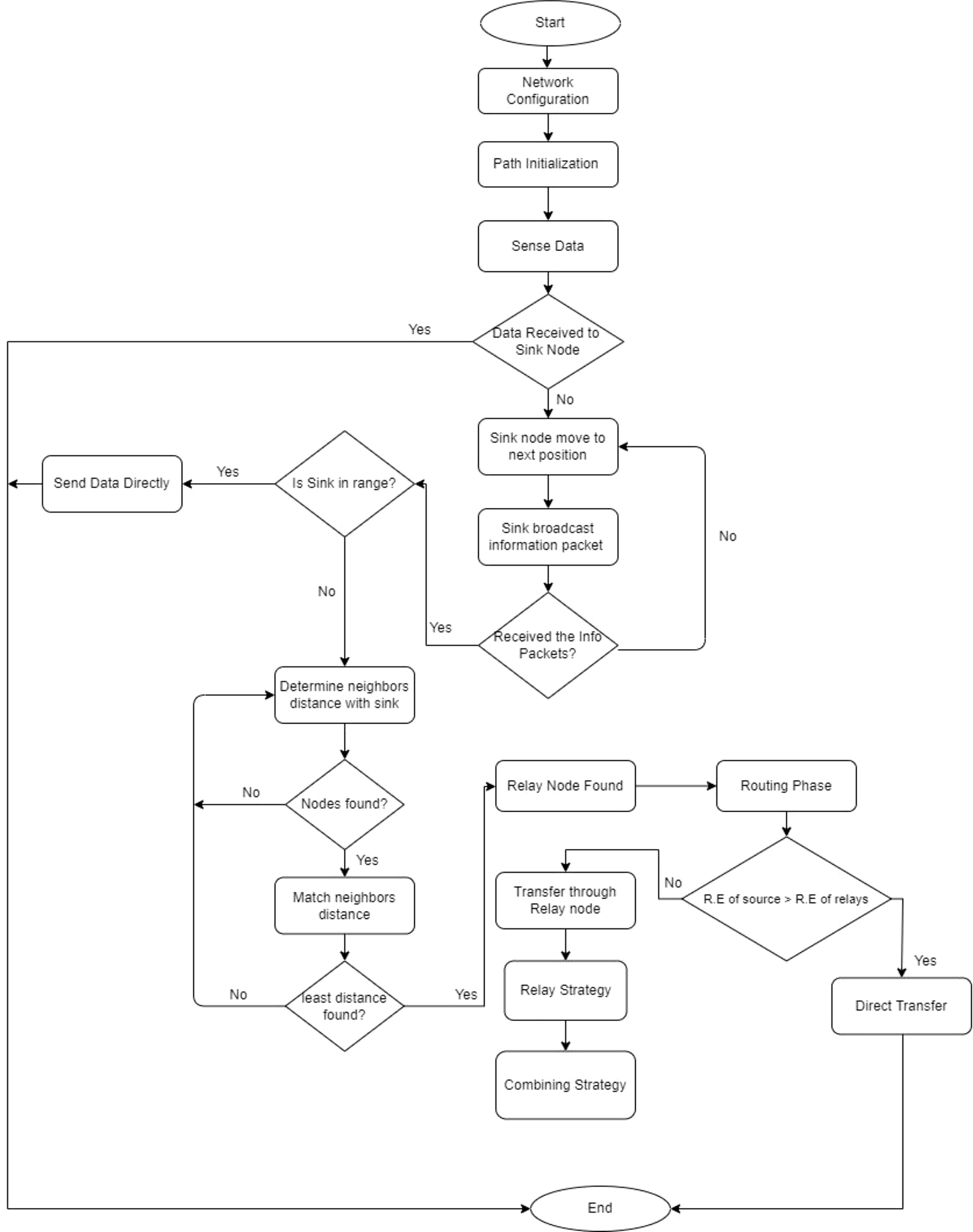
Figure 5 Flow chart of the proposed RACE-SM routing protocol.
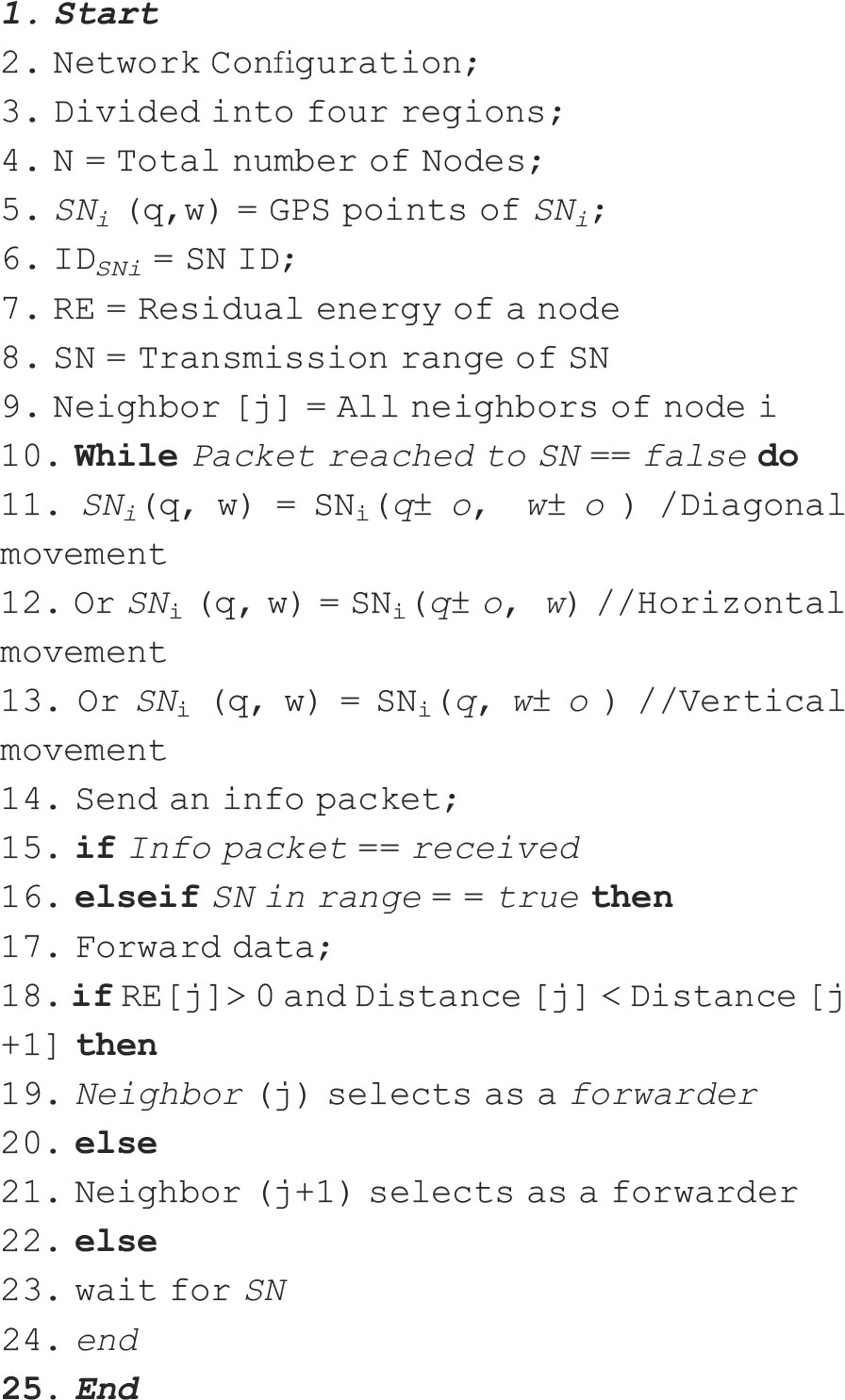
Algorithm 1. Data Transmission Using Sink Mobility.
If the channel is effective, a source sensor node (S) can identify which of its n neighboring sensor nodes is most suited to transfer data to the Sink node. Source and relay sensor nodes are selected by comparing their respective weights.
Using the sensor node with the greater value of Wi, the transmitted data is sent. Directional transmission is possible if the source’s residual energy is greater than to the relay node’s remaining energy. Otherwise, the communication should go through the intermediate nodes.
If Ere (R) < Ere (S), then use direct transfer (23)
else Ere (R) ≥ Ere (S), then use relay node
The relay node uses the Amplify and Forward (AF) technique to transfer the data, which applies an amplification factor before sending the signal to the destination node from the source node.
The destination sensor node D uses the SNRC (signal-to-noise ratio combining) technique to combine the signals from the source S and the relay R. The SNRC combines signals at the receiver. Each array element’s SNR is weighted equally. Equal ratio combining (ERC) doesn’t work better since it doesn’t consider small-scale variations (low SNR) while combining. SNRC, on the other hand, does. The formula for calculating SNRC is:
where X2 shows the weight of the data transmission on the relay route, Yd represents the signal of output that is combined at the receiver node D, and X1 specifies the weight of the direct data transfer route. The algorithm 2 shows the data transmission using relay nodes.
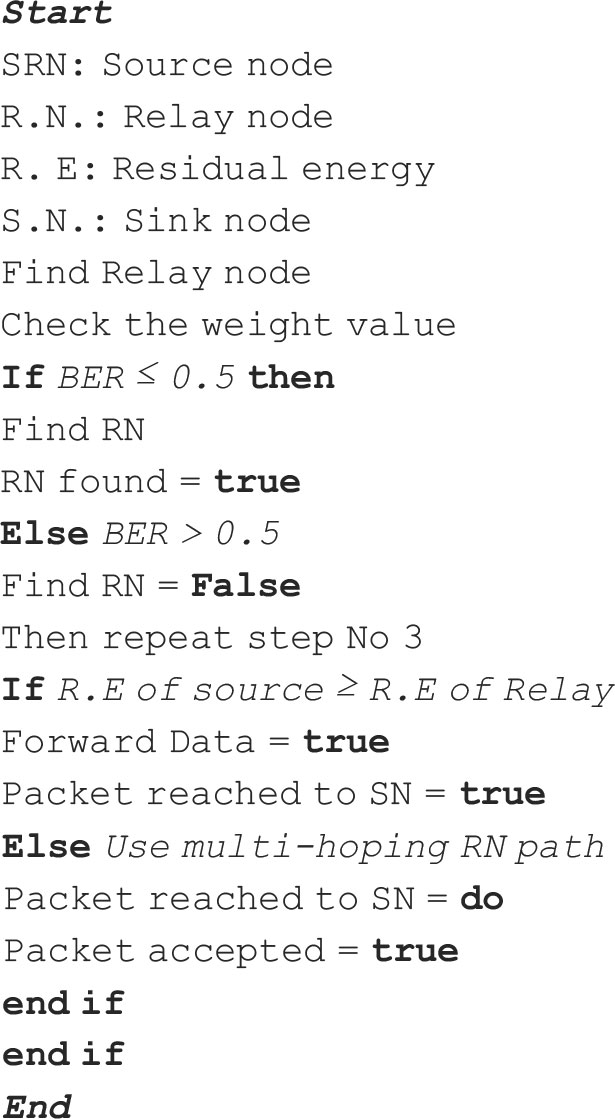
Algorithm 2. Data transferring through the Relay Node.
The following section defines the simulation scheme of the RACE-SM and also the comparison of the RACE-SM and RACE routing protocols. Simulation parameters are defined in Table 1. Additionally, this section defines the primary performance metrics for all compared protocols.
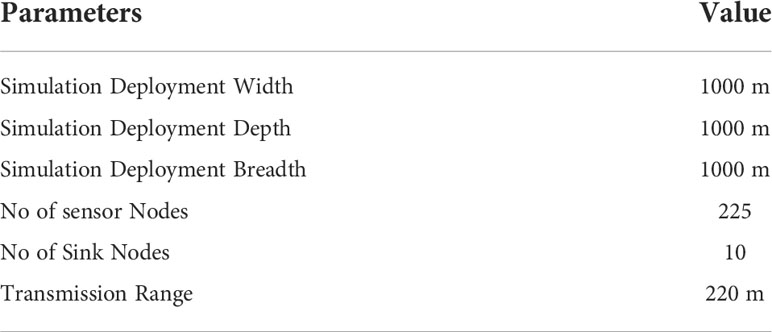
Table 1 Simulation parameters.
Performance metrics for all compared protocols are defined as follows:
• Residual Energy: It described the distinction between the startup nodes’ power and the power of the nodes utilized during the operation.
• Network Lifetime: The overall time spent by running the network is referred to as network lifetime.
• Throughput: The total number of efficiently transmitted packets at the sink is called throughput.
• Path-Loss: Path-loss is a unit of measurement used to describe the difference between the transmitted and received power of a transmitter and a receiver (dB).
This section compares and evaluates the proposed RACE-SM and existing routing schemes. Sensor nodes are deployed randomly for all simulation techniques. This research work is modeled in a 3D environment with a height of 1000m x 1000m x 1000m with ten (10) multiple mobile sink nodes on the water surface and 225 sensor nodes in the functional area deployed randomly. The sensor node sends the data to the nearest node, which transfers it to another neighbor node.
There is efficient cooperation between the sensor nodes that carry the same physical parameters, most importantly depth and weight threshold, with their adjacent nodes to stay informed about the network’s changing conditions. After predefined intervals, nodes calculate their distances to their neighbors. Sensors communicate with the higher layer via neighboring sensors until the information receives at the mobile sink node. The sink node is in charge of the cooperating sensors’ depth thresholds and adaptive mobility.
Figure 6 shows the energy consumption of the proposed scheme and other existing routing methods. The proposed scheme’s energy consumption is the lowest compared to the current routing protocols. The proposed RACE-SM uses the sink mobility technique for data collection from the sensor nodes and direct data transmission between the sender and the sink node. Furthermore, direct data transmission between the source and sink nodes minimizes energy consumption because only one sensor node is part of the data transmission process. RACE uses relay nodes to send and receive data, which uses more energy. Co-DNR, EH-UWSN, and FLDEAR, on the other hand, send data to the sink node through multiple hops. When transferring data through various nodes, higher energy consumption occurs.
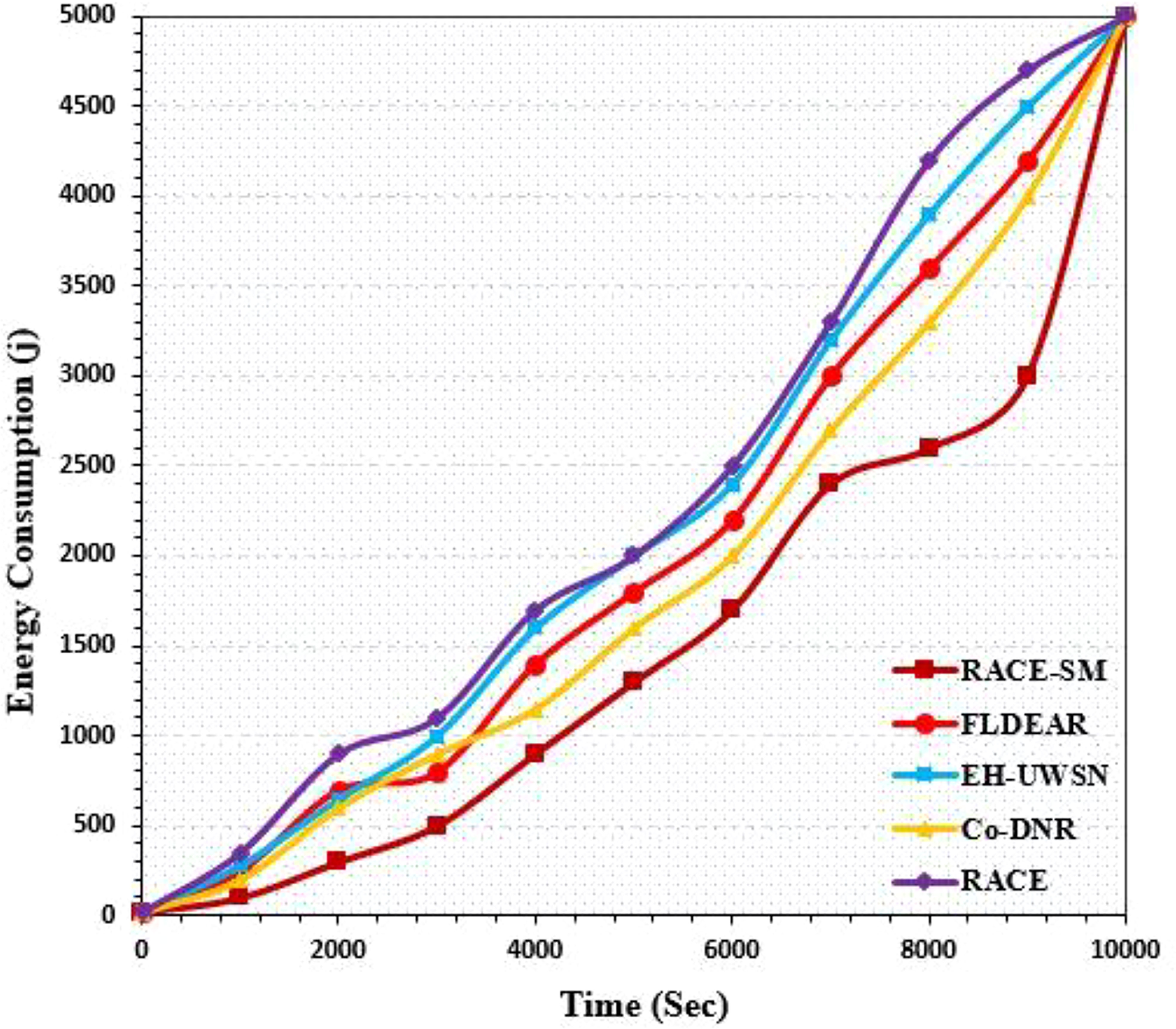
Figure 6 Energy Consumption.
The energy consumption of Co-DNR is lower than the other three protocols, and Co-DNR uses at most two nodes for data transmission, while FLDEAR and EH-UWSN use multiple nodes to transfer data from the source to the destination. FLDEAR has lower energy consumption than the EH-UWSN, and it’s due to controlling the collision of sensor nodes. FLDEAR uses the priority number for each sensor node, and data transmission is done through this number, preventing data retransmission to the sink node.
The energy consumption of both RACE-SM and RACE routing protocols shows in Figure 7. As the graph illustrates, RACE-SM uses energy more efficiently than RACE because efficient data forwarding with the support of load balancing and adjacent nodes is eventually achieved. In RACE, using a single relay node was a big issue that created hotspots that would use more energy than other sensor nodes and die early (Table 2).
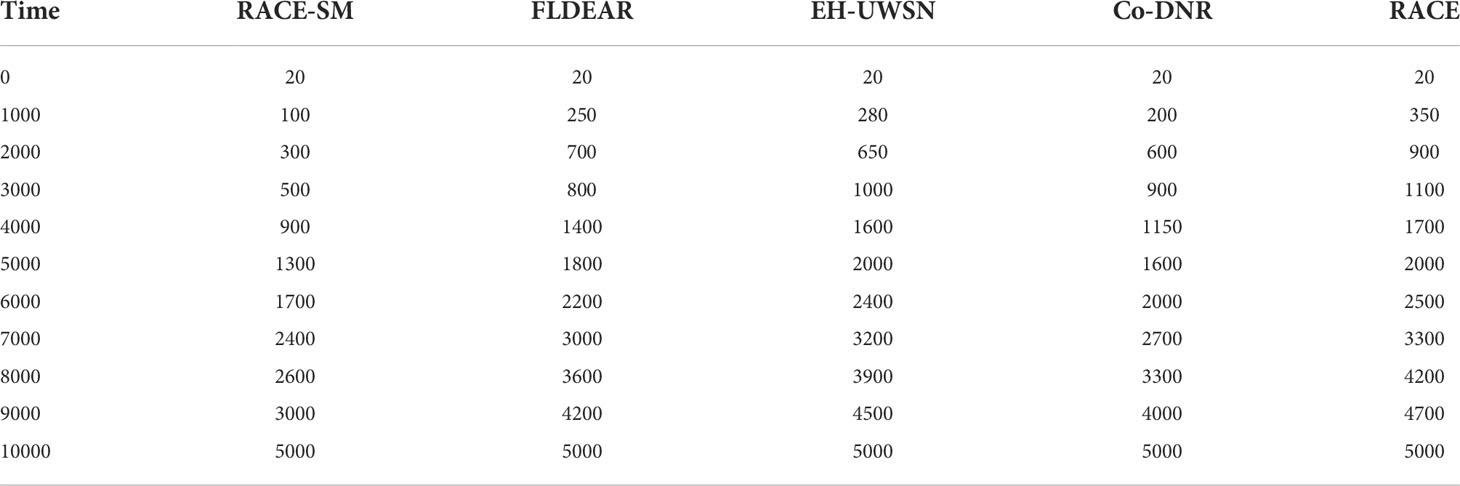
Table 2 Protocols addressing energy consumption.
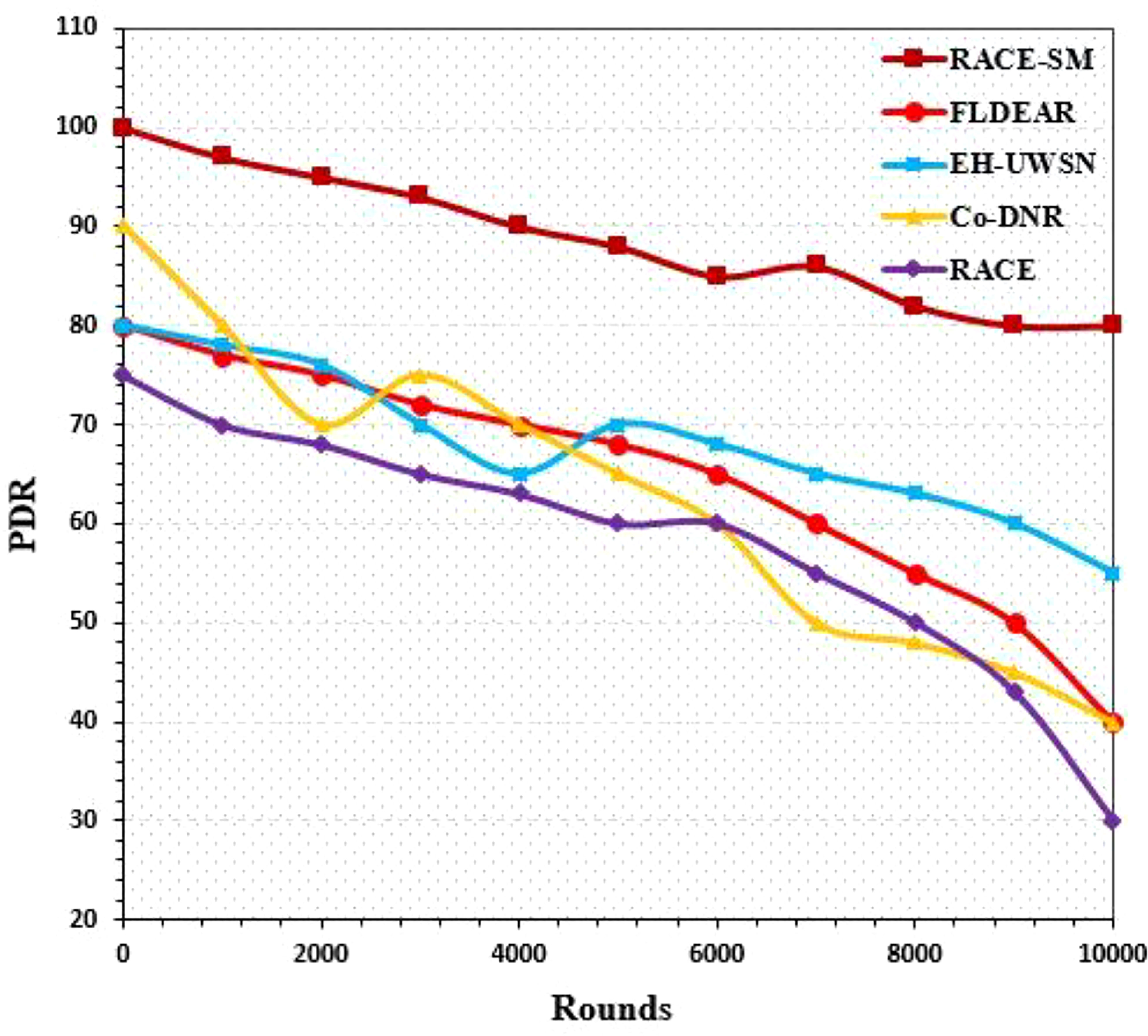
Figure 7 Packet Delivery Ratio (PDR).
The PDR of the proposed and existing routing schemes shows in Figure 7. As illustrated in the figure, the PDR of the RACE-SM is much higher than Co-DNR, EH-UWSN, FLDEAR, and RACE. The main reason behind achieving a higher PDR has reduced BER. The other main reason is using the function’s parameters, such as the lowest distance and residual energy, for selecting the relay node for transferring from source to destination. Using the minimum number of nodes between the source and destination consumes minimum power and time to transmit the data packets.
Co-DNR, FLDEAR, and EH-UWSN have the same PDR at the start but gradually decrease after the 4000 rounds. FLDEAR and Co-DNR use multiple nodes for transferring the data. Therefore, the value decreases while EH-UWSN uses two relay nodes with a destination. Thus, the value is better than the other two schemes. The RACE is also a cooperative routing scheme but using a single relay node with a destination consumes much energy, and the nodes drain the power quickly. Therefore, the PDR is much lower as compared to other routing schemes. From the start to the end of the simulation, RACE-SM has a higher PDR than existing routing schemes (Table 3).
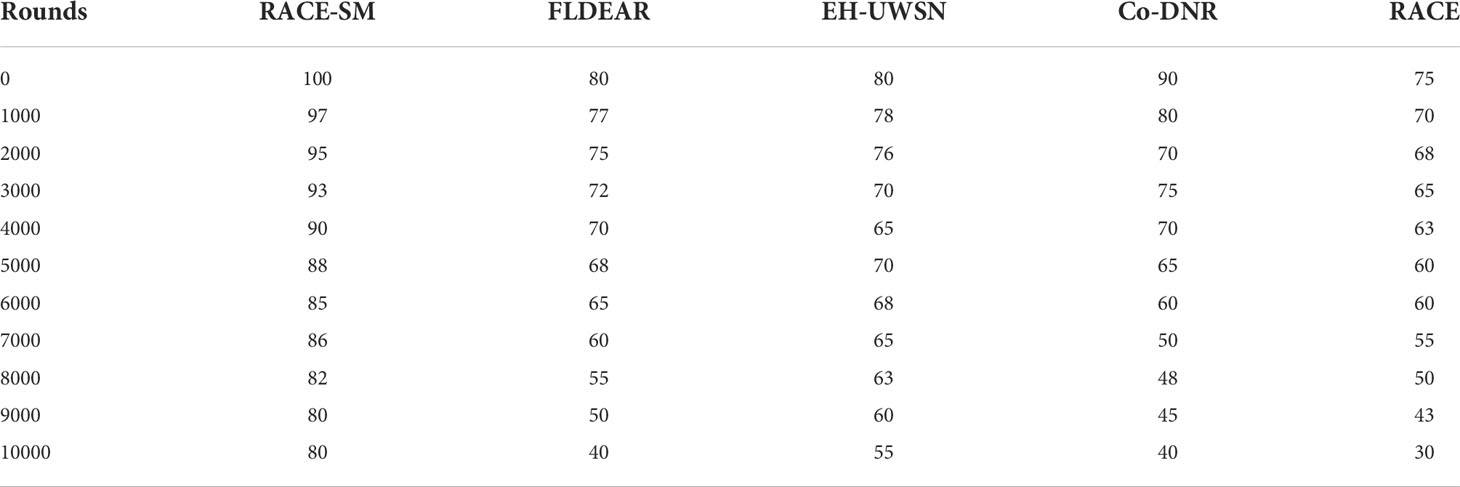
Table 3 Protocols addressing PDR.
The total number of alive nodes in the proposed and existing schemes is plotted in Figure 8. The results show that the number of active nodes in RACE-SM is higher than in the other three strategies. The main reason for this is using the minimum energy consumption. Additionally, selecting the best forwarder node for data transmission is also affected because it will use minimum energy, and the data will be transferred at the lowest cost. Therefore, the number of alive nodes will be high. The Co-DNR is the second one with the maximum number of active nodes because it uses the minor sink nodes to transfer the data packets from source to destination. The total number of active nodes in RACE-SM at round 6000 is 145, and Co-DNR & EH-UWSN have 110 and 100 active nodes, respectively. The total number of active nodes in RACE at 6000 rounds is 110. Still, after the 6000 rounds, nodes die significantly quicker than RACE-SM, and it’s due to RACE using a single forwarder which will create a hotspot getting burden on a single node and drain energy quickly (Table 4).
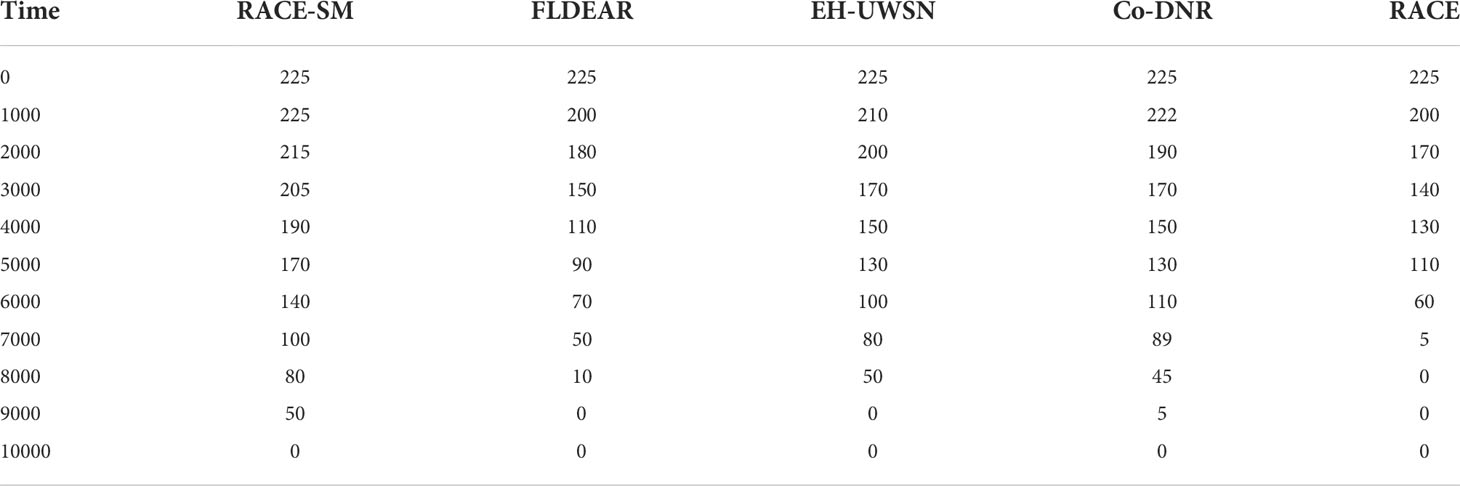
Table 4 Protocols addressing Live Nodes.
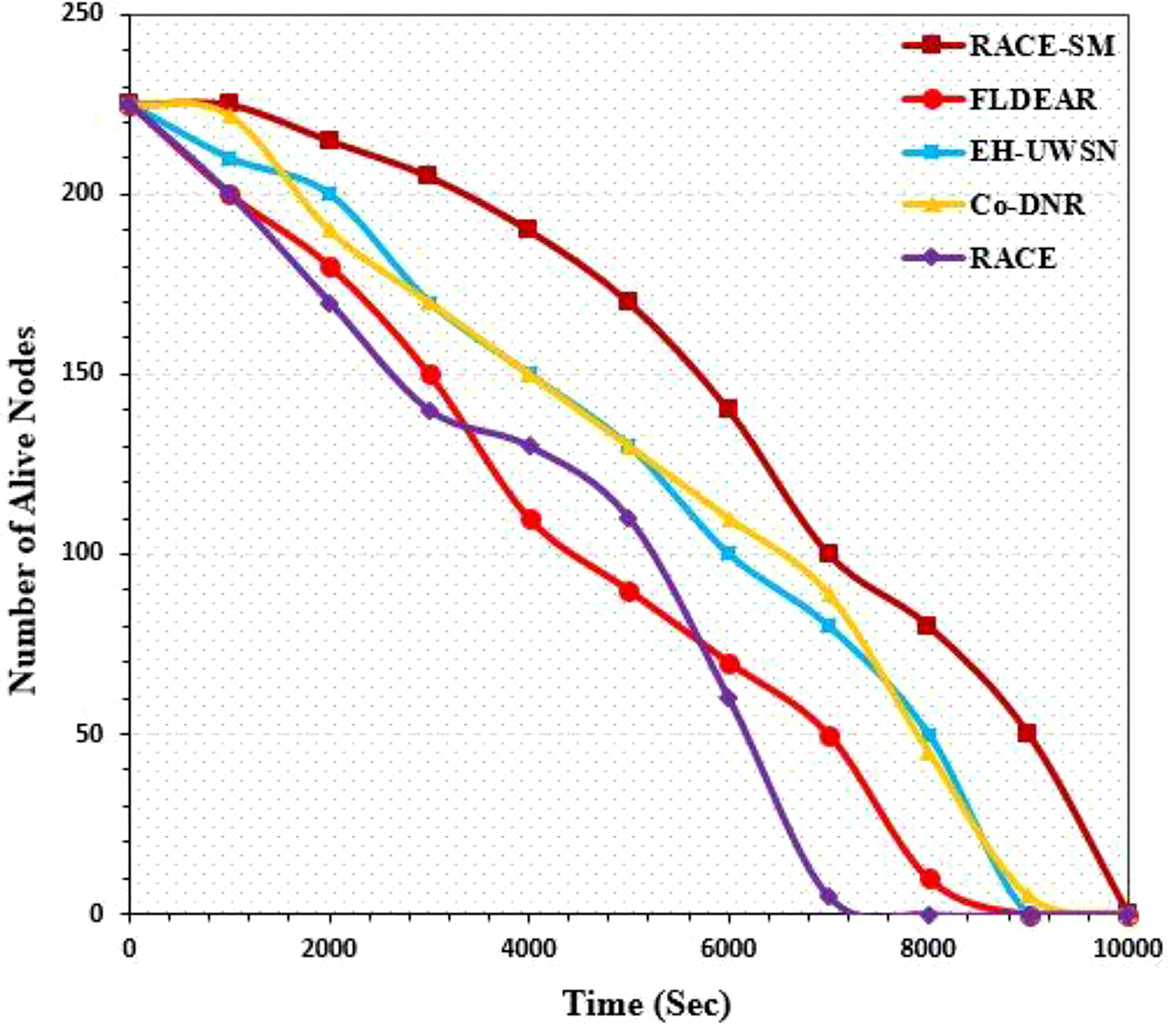
Figure 8 Total Number of alive Nodes.
The results of the end-to-end delay of the proposed and other three routing schemes are shown in Figure 9. As illustrated in the figure, RACE-SM has the lowest latency of all other existing techniques. The reason behind this is sink mobility. Data transferring are done directly between the source and destination. RACE-SM uses the sink mobility method in which sensor nodes communicate the data directly to the sink when the sink is in the communication range; therefore, the number of nodes is reduced between the source and destination.
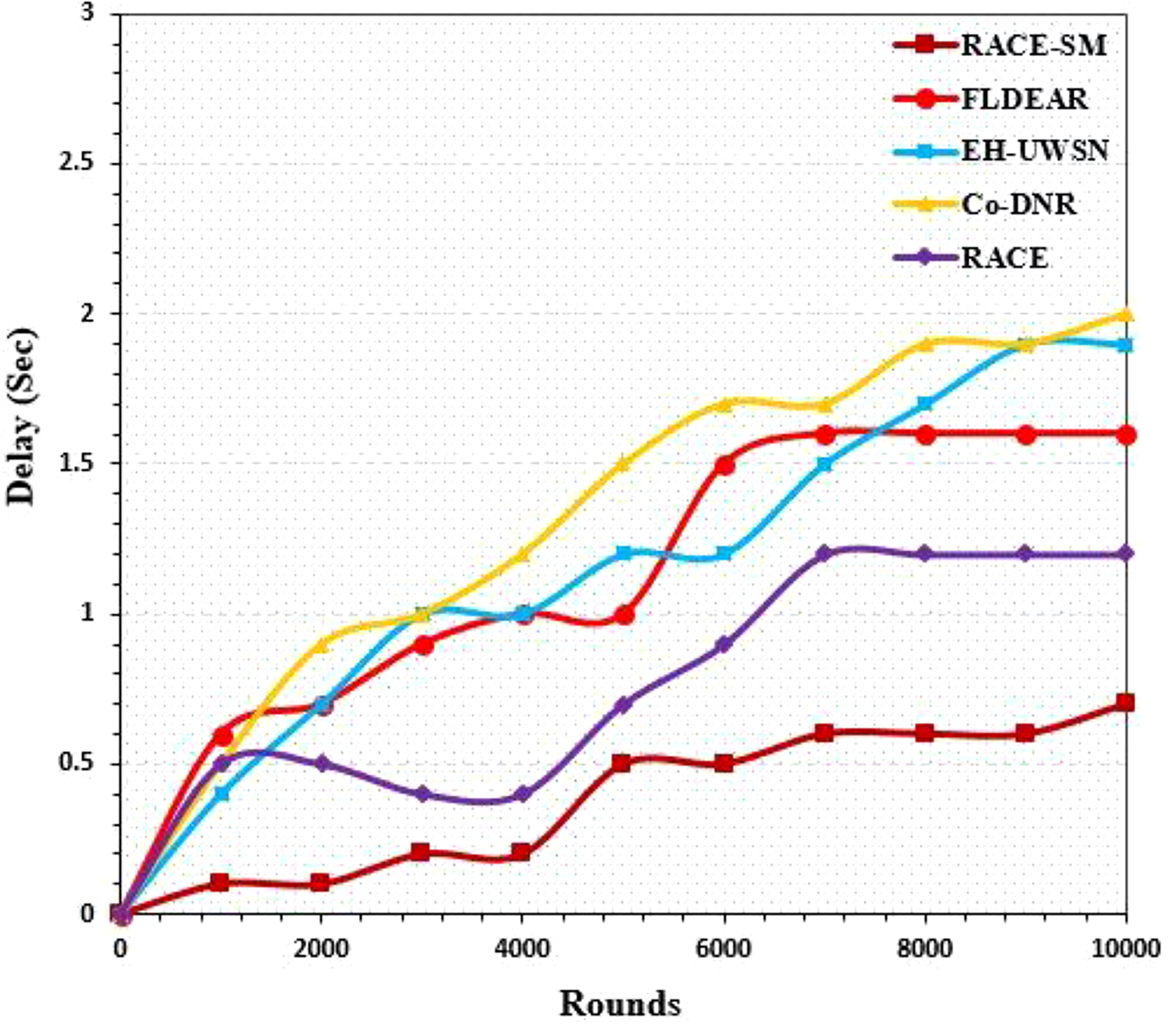
Figure 9 Average end-to-end delay.
The latency of the RACE is lower than Co-DNR, FLDEAR, and EH-UWSN. It’s due to using a single relay node for data transmission between the source and destination. Co-DNR, FLDEAR, and EH-UWSN are approximately the same in latency due to using multiple nodes for data transmission between the source and destination (Table 5).
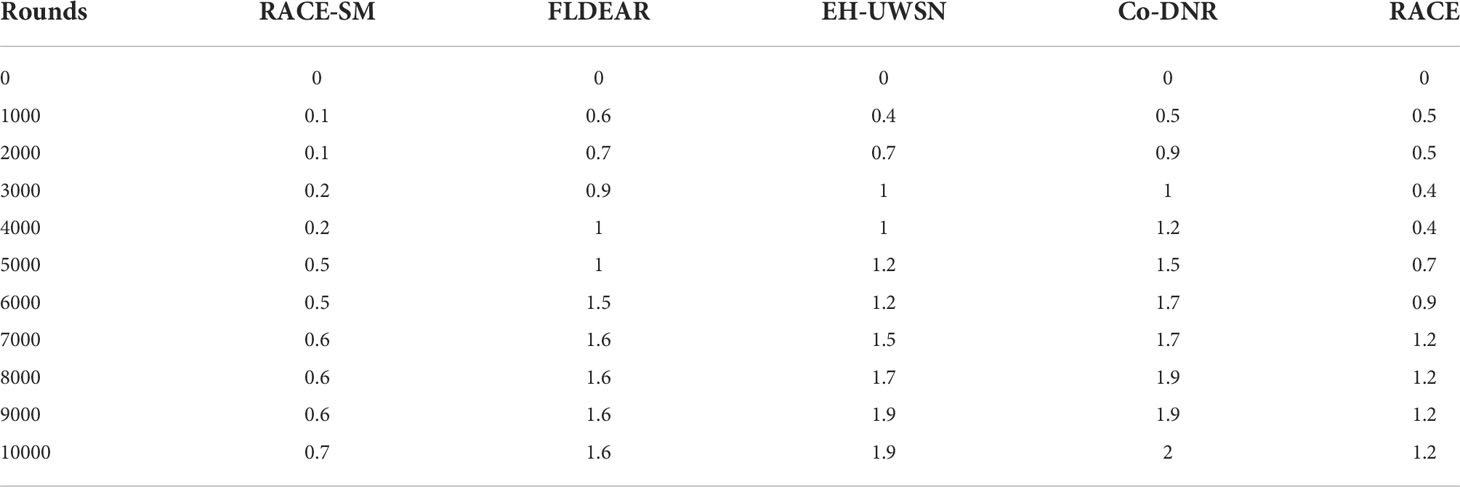
Table 5 Protocols addressing End-to-End Delay.
This research article contains the design of the RACE-SM algorithm for UWSNs. RACE-SM minimizes the energy consumption, the reliability of the network, the PDR, and the number of active sensor nodes. For efficient data collection, the network is divided into multiple portions. In RACE-SM, to gather data correctly, the sink node moves around the network, and when it senses the data, it collects it from the nodes. The sensor node sends the data directly to the sink node when the sink is in communication range, which will help to improve the PDR, reduce energy consumption, and improve network lifetime. Otherwise, data will be transferred through single-hop and multihop transmission methods to enhance the network reliability and reduce packet loss. The utilization of the cooperative technique makes the distance between neighboring nodes lower among neighboring nodes to achieve reliable data transmission between the source and destination. Also, the cooperative scheme achieves load balancing and improves network lifetime. Compared to the current routing schemes, the proposed method performed better up to 51.50%, 28.50%, 26.40%, and 56% compared to FLDEAR, EH-UWSN, Co-DNR, and RACE respectively in terms of live nodes. In terms of energy consumption, the proposed method is better up to 51.50%, 67.30%, 36.50%, and 79.50% compared to FLDEAR, EH-UWSN, Co-DNR, and RACE respectively. The RACE-SM archives higher PDR of 264%, 226%, 283%, and 337% over FLDEAR, EH-UWSN, Co-DNR, and RACE respectively. In terms of end-to-end delay, the RACE-SM performed better up to 80%, 84%, 102%, and 41% over FLDEAR, EH-UWSN, Co-DNR, and RACE respectively. The overall analysis shows that on average with existing routing schemes the proposed method outperforms in in terms of using less energy, having less delay, and being more stable. In future we aim to improve in other parameters such as hop count and want to develop a routing protocol for real time environments.
The original contributions presented in the study are included in the article/supplementary material. Further inquiries can be directed to the corresponding author.
All authors listed have made a substantial, direct, and intellectual contribution to the work and approved it for publication.
This work is supported by Malaysian Institute of Information Technology, Universiti Kuala Lumpur, Malaysia.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Ahmad I., Rahman T., Zeb A., Khan I., Othman M. T., Hamam H. (2022). Cooperative energy-efficient routing protocol for underwater wireless sensor networks. Sensors 22 (18), 6945. doi: 10.3390/s22186945
Ahmad I., Rahman T., Zeb A., Khan I., Ullah I., Hamam H., et al. (2021). Analysis of security attacks and taxonomy in underwater wireless sensor networks. Wireless Commun. Mobile Computing 2021, 1–15. doi: 10.1155/2021/1444024
Ahmed S., Javaid N., Ahmad A., Ahmed I., Durrani M. Y., Ali A., et al. (2016a). SPARCO: Stochastic performance analysis with reliability and cooperation for underwater wireless sensor networks. J. Sensors 2016, 1–17. doi: 10.1155/2016/7604163
Ahmed S., Javaid N., Shahid S., Hadi F., Azeem M. Q. (2016b). “RACE: Reliability and adaptive cooperation for efficient underwater sensor networks,” in 2016 International Conference on Open Source Systems & Technologies (ICOSST). 122–128 (IEEE).
Ahmed S., Javaid JavaidN., Khan F. A., Durrani M. Y., Ali A., Shaukat A., et al. (2015). Co-UWSN: Cooperative energy-efficient protocol for underwater WSNs. Int. J. Distributed Sensor Networks 11, 891410. doi: 10.1155/2015/891410
Anuradha D., Srivatsa S. K. (2019). Energy effectual reconfigurable routing protocol (E2R2P) for cluster based underwater wireless sensor networks. J. Ambient Intell. Humanized Computing 12, 1–8. doi: 10.1007/s12652-019-01413-z
Anwar K., Rahman T., Zeb A., Khan I., Zareei M., Vargas-Rosales C. (2021). Rm-adr: Resource management adaptive data rate for mobile application in lorawan. Sensors 21 (23), 7980. doi: 10.3390/s21237980
Balaji S., Golden Julie E., Harold Robinson Y. (2019). Development of fuzzy based energy efficient cluster routing protocol to increase the lifetime of wireless sensor networks. Mobile Networks Appl. 24, 394–406. doi: 10.1007/s11036-017-0913-y
Banaeizadeh F., Toroghi Haghighat A. (2020). An energy-efficient data gathering scheme in underwater wireless sensor networks using a mobile sink. Int. J. Inf. Technol. 12, 513–522. doi: 10.1007/s41870-020-00445-5
Bouabdallah F., Zidi C., Boutaba R. (2017). Joint routing and energy management in underwater acoustic sensor networks. IEEE Trans. Network Service Manage. 14, 456–471. doi: 10.1109/TNSM.2017.2679482
Bu R., Wang S., Wang H. (2018). Fuzzy logic vector–based forwarding routing protocol for underwater acoustic sensor networks. Trans. Emerging Telecommunications Technol. 29, e3252. doi: 10.1002/ett.3252
Cheng W.-H. (2005). Study mobile underwater positioning system with expendable and multi-functional bathythermographs. Ocean Eng. 32, 499–512. doi: 10.1016/j.oceaneng.2003.12.012
Erol M., Vieira L. F., Gerla M. (2007). “Localization with Dive’N’Rise (DNR) beacons for underwater acoustic sensor networks,” in Proceedings of the Second Workshop on Underwater Networks Montréal: Québec, Canada. 97–100.
Gomathi R. M., Martin Leo Manickam J. (2018). Energy efficient shortest path routing protocol for underwater acoustic wireless sensor network. Wireless Pers. Commun. 98, 843–856. doi: 10.1007/s11277-017-4897-5
Gul H., Ullah G., Khan M., Khan Y. (2021). EERBCR: Energy-efficient regional based cooperative routing protocol for underwater sensor networks with sink mobility. J. Ambient Intell. Humanized Computing 2021, 1–13. doi: 10.1007/s12652-020-02781-7
Javaid N., Ejaz M., Abdul W., Alamri A., Almogren A., Niaz I. A., et al. (2017a). Cooperative position aware mobility pattern of AUVs for avoiding void zones in underwater WSNs. Sensors 17, 580. doi: 10.3390/s17030580
Javaid N., Hussain S., Ahmad A., Imran M., Khan A., Guizani M. (2017b). Region based cooperative routing in underwater wireless sensor networks. J. Network Comput. Appl. 92, 31–41. doi: 10.1016/j.jnca.2017.01.013
John S., Menon V. G., Nayyar A. (2020). “Simulation-based performance analysis of location-based opportunistic routing protocols in underwater sensor networks having communication voids,” in Data management, analytics, and innovation (Singapore: Springer), 697–711.
Latif K., Javaid N., Ullah I., Kaleem Z., Abbas Malik Z., Nguyen L. D. (2020). DIEER: delay-intolerant energy-efficient routing with sink mobility in underwater wireless sensor networks. Sensors 20, 3467. doi: 10.3390/s20123467
Liu J., Yu M., Wang X., Liu Y., Wei X., Cui J. (2018). RECRP: An underwater reliable energy-efficient cross-layer routing protocol. Sensors 18, 4148. doi: 10.3390/s18124148
Mhemed R., Comeau F., Phillips W., Aslam N. (2021). Void avoidance opportunistic routing protocol for underwater wireless sensor networks. Sensors 21, 1942. doi: 10.3390/s21061942
Nayyar A., Ba C. H., Cong Duc N. P., Binh H. D. (2018). Advances in Intelligent Systems and Computing Advances in Intelligent Systems and Computing, Spinger in International Conference on Industrial Networks and Intelligent Systems, Cham. 191–207 (Springer).
Nayyar A., Balas V. E. (2019). “Analysis of simulation tools for underwater sensor networks (UWSNs),” in International conference on innovative computing and communications 2019 (Singapore: Springer), 165–180.
Nayyar A., Puri V., Le D. N. (2019). “Comprehensive analysis of routing protocols surrounding underwater sensor networks (UWSNs),” in Data management, analytics, and innovation 2019 (Singapore: Springer), (pp. 435–450).
Pappas N., Dimitriou I., Chen Z. (2018). “Network-level cooperation in random access IoT networks with aggregators,” in 2018 30th International Teletraffic Congress (ITC 30) Vienna, Austria. 245–253 (IEEE).
Raj Priyadarshini R., Sivakumar N. (2020). Enhancing coverage and connectivity using energy prediction method in underwater acoustic WSN. Journal of Ambient Intelligence and Humanized Computing 11, 2751–2760. doi: 10.1007/s12652-019-01334-x
Shah S., Khan A., Ali I., Ko K.-M., Mahmood H. (2018). Localization free energy efficient and cooperative routing protocols for underwater wireless sensor networks. Symmetry 10, 498. doi: 10.3390/sym10100498
Shah P. M., Ullah I., Khan T., Hussain M. S., Khan Z. A., Qasim U., et al. (2016). “MobiSink: Cooperative routing protocol for underwater sensor networks with sink mobility,” in 2016 IEEE 30th International Conference on Advanced Information Networking and Applications (AINA). 189–197 (IEEE).
Tariq M., Ayaz M., Subhan F., Abbas M. Z. (2021). Energy efficient and link reliable routing (E2LR) scheme for underwater sensor networks. Peer-to-Peer Netw. Appl. 14, 1870–1888. doi: 10.1007/s12083-021-01105-6
Teekaraman Y., Sthapit P., Choe M., Kim K. (2019). Energy analysis on localization free routing protocols in UWSNs. Int. J. Comput. Intell. Syst. 12, 1526–1536. doi: 10.2991/ijcis.d.191203.001
Ullah U., Khan A., Zareei M., Ali I., Khattak H. A., Din I. U. (2019). Energy-effective cooperative and reliable delivery routing protocols for underwater wireless sensor networks. Energies 12, 2630. doi: 10.3390/en12132630
Wadud Z., Ismail M., Qazi A. B., Khan F. A., Derhab A., Ahmad I., et al. (2019). An energy balanced efficient and reliable routing protocol for underwater wireless sensor networks. IEEE Access 7, 175980–175999. doi: 10.1109/ACCESS.2019.2955208
Yahya A., Islam S. U., Zahid M., Ahmed G., Raza M., Pervaiz H., et al. (2019). Cooperative routing for energy efficient underwater wireless sensor networks. IEEE Access 7, 141888–141899. doi: 10.1109/ACCESS.2019.2941422
Keywords: UWSNs, energy efficient routing, routing protocols, sink mobility, cooperative routing
Citation: Ahmad I, Rahman T, Khan I, Jan S, Musa S and Uddin MI (2022) RACE-SM: Reliability and adaptive cooperation for efficient UWSNs using sink mobility. Front. Mar. Sci. 9:1030113. doi: 10.3389/fmars.2022.1030113
Received: 28 August 2022; Accepted: 25 October 2022;
Published: 15 November 2022.
Edited by:
Hong Song, Zhejiang University, ChinaReviewed by:
Inam Ullah, Shandong Jianzhu University, ChinaCopyright © 2022 Ahmad, Rahman, Khan, Jan, Musa and Uddin. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Salman Jan, c2FsbWFuLmphbkB1bmlrbC5lZHUubXk=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.