
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Mar. Sci. , 28 October 2022
Sec. Marine Fisheries, Aquaculture and Living Resources
Volume 9 - 2022 | https://doi.org/10.3389/fmars.2022.1011862
This article is part of the Research Topic Innovations in Fishing Technology Aimed at Achieving Sustainable Fishing View all 23 articles
 Ólafur Arnar Ingólfsson1*
Ólafur Arnar Ingólfsson1* Michael Breen1
Michael Breen1 Shale Rosen1
Shale Rosen1 Manu Sistiaga1
Manu Sistiaga1 Terje Jørgensen1Dagfinn Lilleng2Jostein Saltskår1
Terje Jørgensen1Dagfinn Lilleng2Jostein Saltskår1 Liz Kvalvik1Sigurd Hannaas1Hermann Pettersen2
Liz Kvalvik1Sigurd Hannaas1Hermann Pettersen2Blue whiting (Micromesistius poutassou) is harvested in the Northeast Atlantic by a multinational fleet of pelagic trawlers. Occasionally, vessels take catches which exceed their remaining holding capacity and in extreme cases large catches cause codends to burst, resulting in spill of catch. To control catch quantity, a catch limitation system was developed and tested. The system consists of three components: 1) escape opening(s) in front of the codend to release excess fish, 2) a fish lock to prevent loss of fish through the escape opening(s) during haulback and at the surface, and 3) a choking unit to match codend capacity to the desired size of catch. Blue whiting escaped through both longitudinal slots and large (≥ 2 m) meshes in front of the codend. However, video observations showed that with large meshes in the upper panel, large amounts of blue whiting escaped long before the codend was full. Therefore, a design with large openings in the bottom was combined with longitudinal slots in the side and top panels. Two fish locks were tested: an oblique netting panel designed to seal off the codend when vessel speed reduce during haulback, and a cylinder of netting with a choking rope that closed it after the codend was filled. Both fish lock designs inhibited release of fish during haulback and at the surface, but the attachment of the constricting rope in the cylinder frequently broke. The choking unit consisted of a depth triggered releaser connected to a strap of rope wrapped around the codend. Mechanical releasers with factory-set depth trigger and electronic versions were tested. Both freed the choke point as intended, but occasionally at unpredictable depth. A reliable relationship (r2 = 0.94) was attained between codend choking position and catch amount, demonstrating that codend capacity could be adjusted to achieve target catch quantities. Our work shows that controlling catch quantity in the blue whiting pelagic trawl fishery can be achieved effectively through relatively simple modifications to the codend section Future work is needed to optimize the fish lock design and ensure the codend choking rope releasers trigger reliably and at the proper depth.
Blue whiting (Micromesistius poutassou) is the largest commercially exploited stock of mesopelagic fish in the Northeast Atlantic Ocean, with distribution from the Mediterranean Sea north to the Barents Sea and west to Greenland. It is managed as one stock, with northern and southern components. The stock is presently within safe biological limits (ICES, 2021). Historically, it has been difficult to reach agreement on the exploitation (Standal, 2006; Bjørndal and Ekerhovd, 2014). Overall TACs for the last years have been set in annual agreements between the European Union, the Faroe Islands, Iceland, Norway and the United Kingdom, based on advice by the International Council for the Exploration of the Sea (ICES). The individual states have, however, not agreed on each state’s share of the TAC and have therefore themselves set their national quotas, resulting in overall catches exceeding the agreed TAC. During the last years overall annual catches have been in excess of one million tons, more than 70% of which is fished by the Faroe Isles, Norway, Iceland, UK and Russia, all with catches exceeding 100,000 tons during the last years (ICES, 2021).
The multi-national fishing fleet mainly consists of large pelagic trawlers, some of which can process or freeze the catch on board for human consumption, but most of the catch is transported to land for reduction to fishmeal and oil (op.cit.). In 2022, a fleet of 55 Norwegian vessels (combined purse seiner/trawler vessels without on-board processing) ranging from 54 to 88 m in length (median 70 m) participated in the directed fishery for blue whiting. These vessels have hold capacities of approximately 1,500 – 2,500 tons and annual quotas are in the range of 5,000 tons per vessel. In a related project (present authors, unpublished data), five such vessels provided detailed logs of their 2019 blue whiting fishing season. Average catch per trip was 1,650 tons, with most vessels catching their quota over the course of three fishing trips (average 5 tows per trip).
The fishery mainly takes place on the spawning grounds along the continental slope west of the British Isles at depths of 400-600 m using large pelagic trawls, mostly 2,000 – 2,300 m in stretched circumference (Sæstad, A., Egersund Trawl, personal communication) with vertical and horizontal mouth openings exceeding 100 m. Large-opening trawls and dense aggregations of fish frequently result in catches of many hundred metric tons. When catches are hundreds of tons, codends sometimes burst, most likely because of dense packing of fish coupled with swim-bladder expansion during the ascent from the great fishing depth. Burst codends result in large amounts of spilled fish which cannot be recovered. This was visualized in the media in February 2022, when a large shoal of dead blue whiting was documented floating at the surface behind a large pelagic trawler in the Bay of Biscay, off the coast of France (France 24, 2022; The Guardian, 2022). The vessel explained the incident as an accident caused by the rupture of the trawl net due to an unexpectedly large catch. Large catches may also lead to discarding if the catch size for a haul exceeds the remaining holding capacity of the vessel. Long sailing distances to landing locations incentivize filling holds completely before sailing for port, however, it is challenging to ensure that the final haul fits the remaining capacity, and it may therefore be tempting to take too large catches and discard catch in excess of the holding capacity. This is a particular challenge when fishing in dense aggregations. Transfer of excess catch to other vessels is prohibited.
We are unaware of any studies quantifying the extent of unaccounted mortality in the directed fishery for blue whiting due to burst codends or insufficient hold capacity. The International Council for Exploration of the Sea (ICES) assumes the discards in the directed blue whiting fishery as small (ICES, 2021). The highest discard was reported by Ireland with approximately 2.4% of catches discarded. The four largest fishing nations (Faroe Islands, Norway, Iceland and Russia) do not report any discards. Despite a lack of formal documentation of burst nets and discards due to insufficient remaining hold capacity, the Norwegian blue whiting industry acknowledges a need to regulate catch volumes more effectively to address these challenges and has engaged with fisheries managers and researchers to develop solutions.
The issues were raised by the Norwegian fishing industry itself and by the Norwegian Directorate of Fisheries. Funding for the present study is also provided by the industry via the Norwegian Seafood Research Fund and by the Directorate of Fisheries. The topics studied are, however, highly relevant also to the other national fleets fishing for blue whiting, most of which have vessels and gear similar to that of the Norwegian fleet.
Previous work on catch limitation devices in demersal trawls include elastic meshes in front of the codend (Goudey and Randazzo, 2001), a self-closing codend (Pol and Chosid, 2012), a partially detached codend (Sistiaga and Grimaldo, 2012) and slots that open up as catch builds up in combination with a self-closing fish lock (Grimaldo et al., 2014; Ingólfsson et al., 2021a). Fish locks are used in some fisheries and surveys to trap fish in the codend and thereby inhibit escape of fast swimming species during haulback (Stewart and Robertson, 1985; Workman and Taylor, 1989). To prevent loss of fish through the slots at the surface, Grimaldo et al. (2014) and Ingólfsson et al. (2021a) used a fish lock with a constrictor rope, activated by the lateral expansion of the codend due to catch build-up. In addition, Ingólfsson et al. (2021a) used a choking rope on the codend so that the target quantity of fish could be adjusted. A related “sequential codend” system, without a fish releasing section, is described in greater detail in Brinkhof et al. (2018) and Ingólfsson et al. (2021b).
In the present study, we designed a system for the blue whiting fishery incorporating all three of these components: 1) A fish release section with openings in front of the codend where fish in excess of the holding capacity of the codend can escape. 2) A fish lock to prevent loss of fish from the codend during haulback and at the surface. 3) A depth-triggered releaser and choking rope placed at a preselected location on the codend. The holding capacity is then limited to a desired catch volume, and active release of the choking rope during haulback frees additional codend volume. This additional volume is intended to slow the ascent rate of the codend by allowing fish to freely decompress, releasing expanding gas from ruptured swim bladders and body cavities during ascent, and to dissipate buoyant lift from the catch over a large surface area in the ascending codend, increasing drag and decreasing ascent velocity. Previous studies have documented codend ascent rates of 4 m sec-1 as they break the surface, generating a wave visible at ~800 m distance (Rosen et al., 2019). Slowing ascent and the force at which the codend breaks the surface has been suggested to reduce the likelihood of ruptures. The system was tested onboard fishing vessels under normal fishing conditions and in the season and fishing grounds where excessive catches presently occur.
The fishing trials were carried out during two different cruises: Cruise 1, conducted onboard FV “Vikingbank” from 9th to 24th March, 2021; and cruise 2, conducted onboard FV “Vikingbank” (new vessel, same name) from 23rd March to 10th April, 2022.
FV “Vikingbank” used in cruise 1 was built in 2000 and is 61.75 meters long and has a beam of 11.6 meters, with a gross tonnage of 1190 tons and a 2796 kW main engine. FV “Vikingbank” used in cruise 2 was built in 2021 has a length of 68 meters and a beam of 13 meters, with a gross tonnage of 2144 tons and a 3798 kW main engine.
For both cruises, the vessel was equipped with a 2016 meter stretched circumference “Capto” pelagic trawl (Vónin, Faroe Islands), fitted with a ~700 ton capacity codend (estimated volume of 1300 m3 assuming 50% mesh openings). Stretched lengths of the trawl and codend were 571 and 73.5 m respectively, overall distance from trawl doors to codend was approximately 875 meters. Thyborøn trawl doors (13.11 m2, 3.5 tons) were used to spread the trawl, using 220 m long bridles. The lower bridles were fitted with ~1.5 ton chain bundles and 11 m of chain setback.
On cruise 1, the geometry of the trawl was monitored in real-time throughout each haul using a Simrad FS 70 Trawl Sonar and depth sensor fitted to the headline and Scanmar door spread sensors. The catch in the codend was monitored using four Simrad PI 32 catch sensors and a Scanmar Trawl-Eye echosounder (see section 4 for more details).
On cruise 2, the geometry of the trawl was monitored using Furuno TS-331A Trawl Sonar and depth sensor, fitted to the headline, and Marport door spread and depth sensors. The catch in the codend was monitored using a combination of Marport Net Fill and Simrad PI 32 catch sensors, a Marport Catch Explorer (with echosounder) and two Marport Trawl Explorer echosounders (see section 4 for more details).
The catch limitation system (Figure 1) tested in the present trials consists of three key components: a fish release section between the trawl belly and codend, a fish lock at the front of the codend and a choking unit placed at different locations on the codend to adjust its capacity during active fishing and provide extra volume during haulback. The fish release section and the fish lock should permit free passage of fish into the codend during the normal fishing operation up until the codend is filled. The escape openings should therefore minimize escape up until the codend is full and the fish lock allow free passage of fish, but once the codend is full, any additional fish entering should escape freely with minimal risk of crowding and abrasive injury. Once the codend is full, the fish lock should prevent fish already in the codend from swimming forward and escaping through the openings in the fish release section. Different shapes and placements of escape holes were tested in the fish release section to balance the need to prevent fish from escaping before the codend filled while providing sufficient capacity for all incoming fish to escape once the codend was full. Two designs of fish lock were tested. For adjusting codend capacity, two styles of depth-triggered releasers were tested.
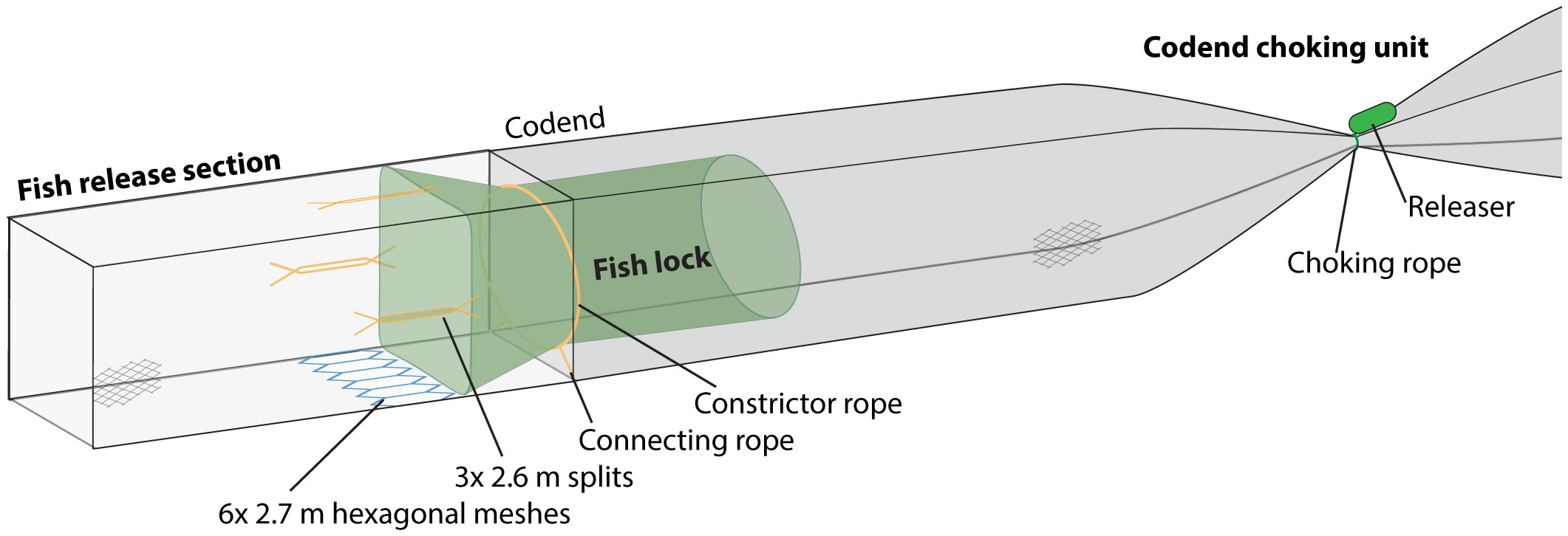
Figure 1 Catch limitation system – general overview illustrating Rig 4 with fish lock 2: Consists of a four-panel cylinder of netting, 10-16 m long, inserted between the trawl and codend, that incorporates two key components: escape openings and a “fish lock”. The rig should allow free passage of the catch from the trawl into the codend during the fishing process, until the codend is full. The escape openings therefore should prevent escape during the normal fishing process, but once the codend is full should then enable fish to escape freely with minimal risk of crowding and abrasive injury. The fish lock should permit free passage into the codend during the normal fishing operation. But, once the codend is full and/or during heaving, the catch on the codend side of the fish lock should press against the fish lock netting, closing it, and preventing any loss of the catch retained in the codend through the escape opening. The catch limit release mechanism releases the retained catch into the residual codend during haulback (see section 4).
The fish release sections tested consisted of a four panel 80 mm netting section, 560 meshes in circumference (4 x 140 meshes), inserted between the trawl belly and codend (Figure 1), and incorporated one of three different types of release openings (hexagonal meshes, half-diamond meshes, slots) or a combination of openings. Height and width of the section during trawling was estimated at 5 m, based upon observations from codend echosounder (described below), and corresponds to ~45% lateral mesh opening. This estimate is used in calculating the theoretical area of the release openings in each rig tested:
Rig 1 was based on a 10 m long section with six 2.7 m long hexagonal meshes in the front of the top and bottom panels (Figure 2.1). The distance from the meshes to the forward edge of the codend was 6 m. This design went through three iterations:
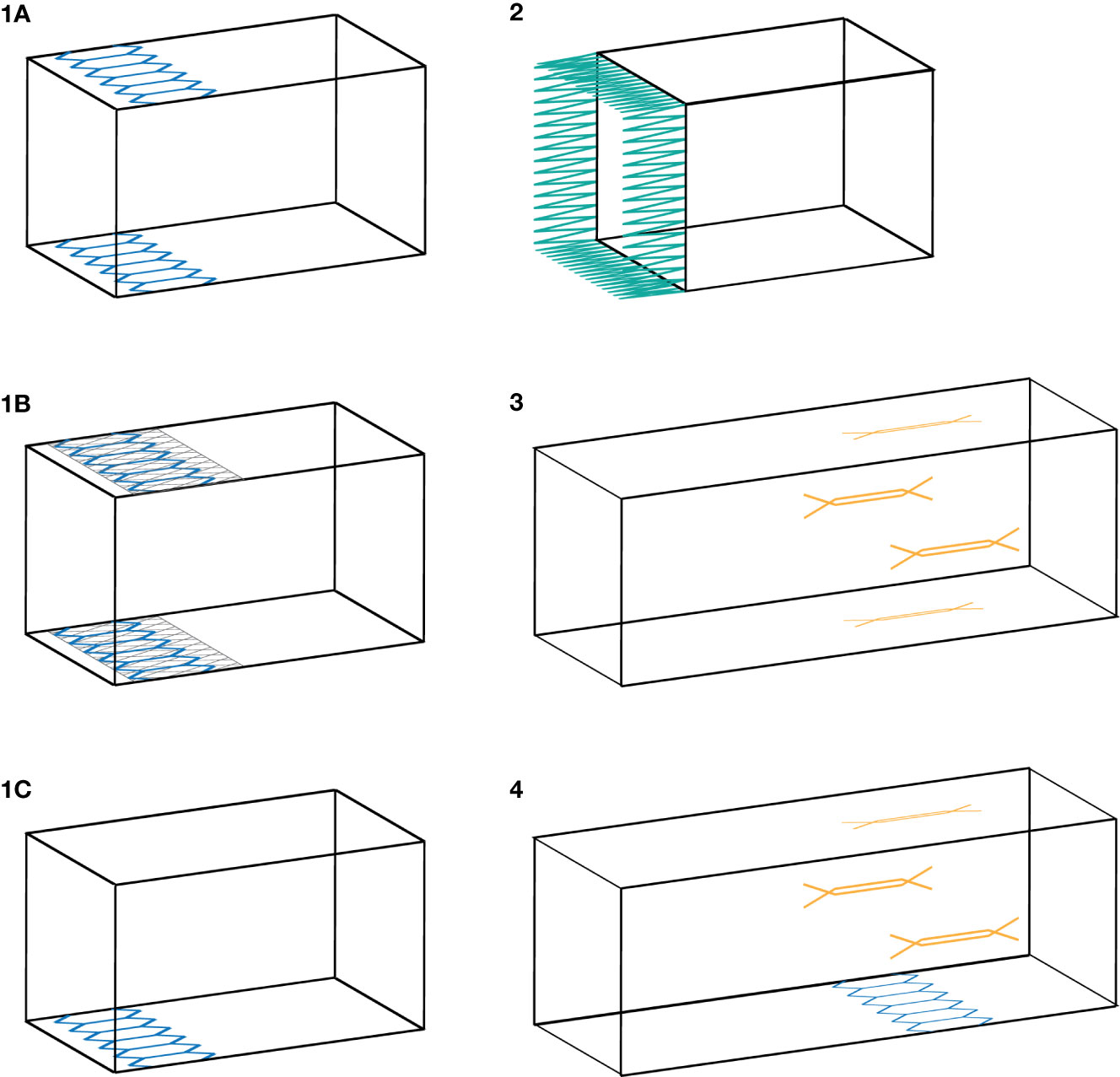
Figure 2 (1A) Section with hexagonal meshes in the front (top and bottom panels); (1B) Section with hexagonal meshes in the front (top and bottom panels), loose small-meshed netting covers the openings. (1C) Section with hexagonal meshes in the front, bottom panel only. (2) section with large meshes in the front (all four panels); (3) section with slots (all four panels); and (4) section with slots (top and side panels) and hexagonal meshes in the bottom.
1a – Initial design with meshes in both top and bottom panels. Theoretical combined area of release openings: 27 m2
1b – As above, loose netting cover panels (80 mm mesh size) were fitted to the outside of the trawl, covering the 2.7 m long hexagonal meshes in the top and bottom panels. The loose netting cover panels were attached to the forward end of the openings to form a visual barrier that would not prevent the release of excess catch (pressed fish and waterflow when the codend filled would force the sides and trailing edge of the cover panels open). Theoretical combined area of release openings: 27 m2
1c – Loose netting panels in Rig 1b removed and 2.7 m long hexagonal meshes on top removed leaving just 2.7 m long hexagonal meshes in bottom panel. Theoretical area of release openings: 13.5 m2
Rig 2 – A 10 m long section, with 2 m long diamond half-meshes in front of the four panels (Figure 2.2). The distance from the meshes to the codend was 8 m. Theoretical combined area of release openings, given 50% lateral expansion of meshes: 34 m2
Rig 3 – A 16 m long section, with four 2.6 m long slots, one in the aft of each of the four panels (Figure 2.3). The distance from the rear openings of the slots to the codend was 4 m. Theoretical area of each of the release openings, assuming elliptical shape and 50% lateral mesh opening (consistent with camera observation):1.8 m2, 7.2 m2 for all four openings combined.
Rig 4 – A 16 m long section with openings that were a hybrid of rigs 1 and 3, i.e. 2.5 m slots at the top and side panels and hexagonal meshes in the bottom panel (Figure 2.4). The distance from the openings to the codend was 6 m. Theoretical area of release openings: 18.9 m2.
A fish lock was installed just after the release section at the entrance of the codend. Like the release section, it should permit free passage of the catch into the codend during the normal towing operation but once the codend is full and/or during haulback the lock should prevent any loss of the catch retained in the codend. Two different fish lock designs were tested during the trials. In cruise 1 (2021), a single netting panel constructed of 80 mm mesh size with 210/96 nylon (PA) twine, 74.5 meshes long (6 m), was fixed across the top panel, approximately 0.3 m aft of the escape openings at the release section, and then fixed halfway down the side panels of the codend on the mesh bars of the fish release section on a diagonal line sloping towards the codend panels (Figure 3.1). When water flow is reduced during haulback, the lower/aft portion of the panel drops to the underside of the codend, preventing fish from moving forward.
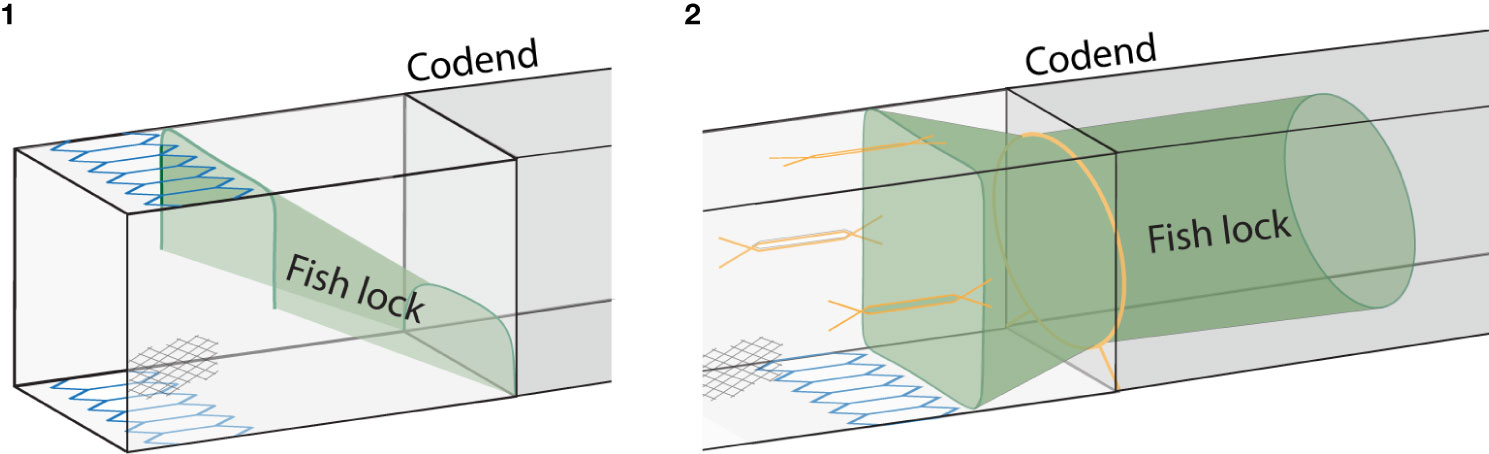
Figure 3 (1) fish lock consisting of an inclined net panel (Type 1, left); (2) fish lock consisting of a cylindrical net (Type 2, right).
In cruise 2 (2022) a cylinder of netting was used, with the leading edge fixed to the top, bottom and side panels of the release section 0.1 m behind the escape opening panels (Figure 3.2). A rope passed around the cylinder to serve as a choker (constrictor rope) and close the fish lock once the codend was filled. Thus, the fish lock closes based upon the amount of fish inside the codend rather than the stage of the fishing operation and waterflow inside the trawl. The fish lock cylinder had 60 mm mesh size and a total length of 8.6 m (5.6 m twisted 210/96 PA in front, 3 m braided polyethylene (PE) in rear). Plastic rings were attached to the outside of the netting, where the PA and PE nettings were joined, with a 11.0 m circumference circular strop of 18 mm diameter ultra-high molecular weight polyethylene rope threaded through, so that the rope could move more freely.
The stretched circumference of the outer fish release section was 44 m. Previous observations (unpublished) in front of the codend prior to catch build-up show less than 20% transversal mesh opening, corresponding to < 9 m circumference for 560 meshes of 80 mm mesh size. The length of the constrictor rope was 25% of the stretched circumference to allow the cylinder to expand fully before catch built up. In order to prevent the fish lock from extending forward into the fish release section, the two bottom “corners” where the 18 mm constrictor rope passed around the cylinder were attached to the lower selvedges where the fish release section and codend meet using 2 m long connecting ropes in 10 mm braided nylon (Figure 1).
The codend choking unit (choking rope and releaser) was placed at different locations along the length of the codend in order to limit the effective volume of the codend and consequently catch size (Figures 4, 5). The releasers were manufactured by Fosstech AS (Stokke, Norway). A sturdy housing contains the depth trigger and a mechanical release arm (Figure 4). Two variants of the releaser were tested: a mechanical version, where the release depth was factory-set at 120 or 150 m; and an electronic version, tested during cruise 2 only, which allowed the release depth to be programmed prior to each deployment. Both units are approximately 350 x 300 x 150 mm and weigh 11 kg in air.
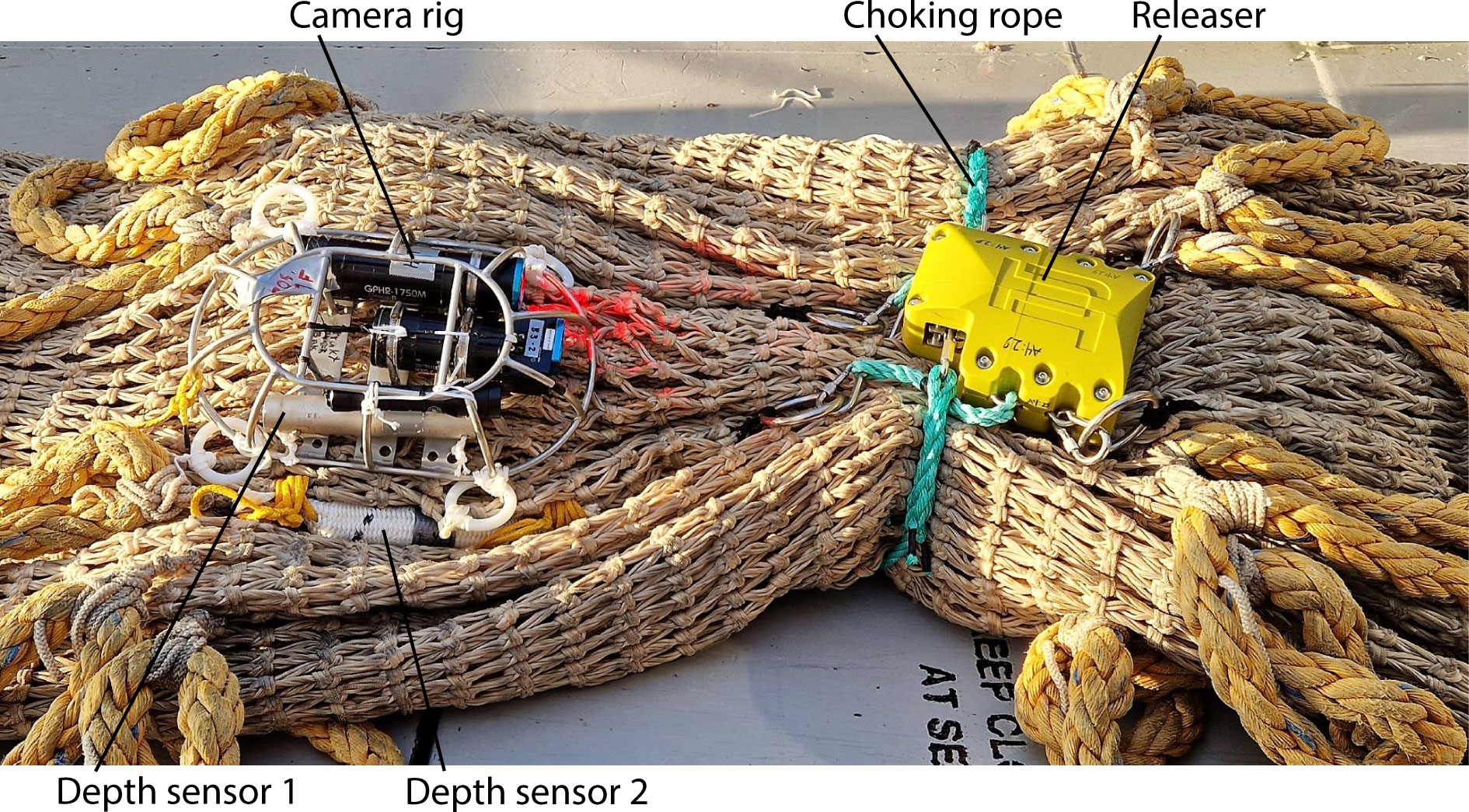
Figure 4 Depth triggered releaser mounted on codend with a choking rope. Camera in a steel frame facing towards the catch release unit.
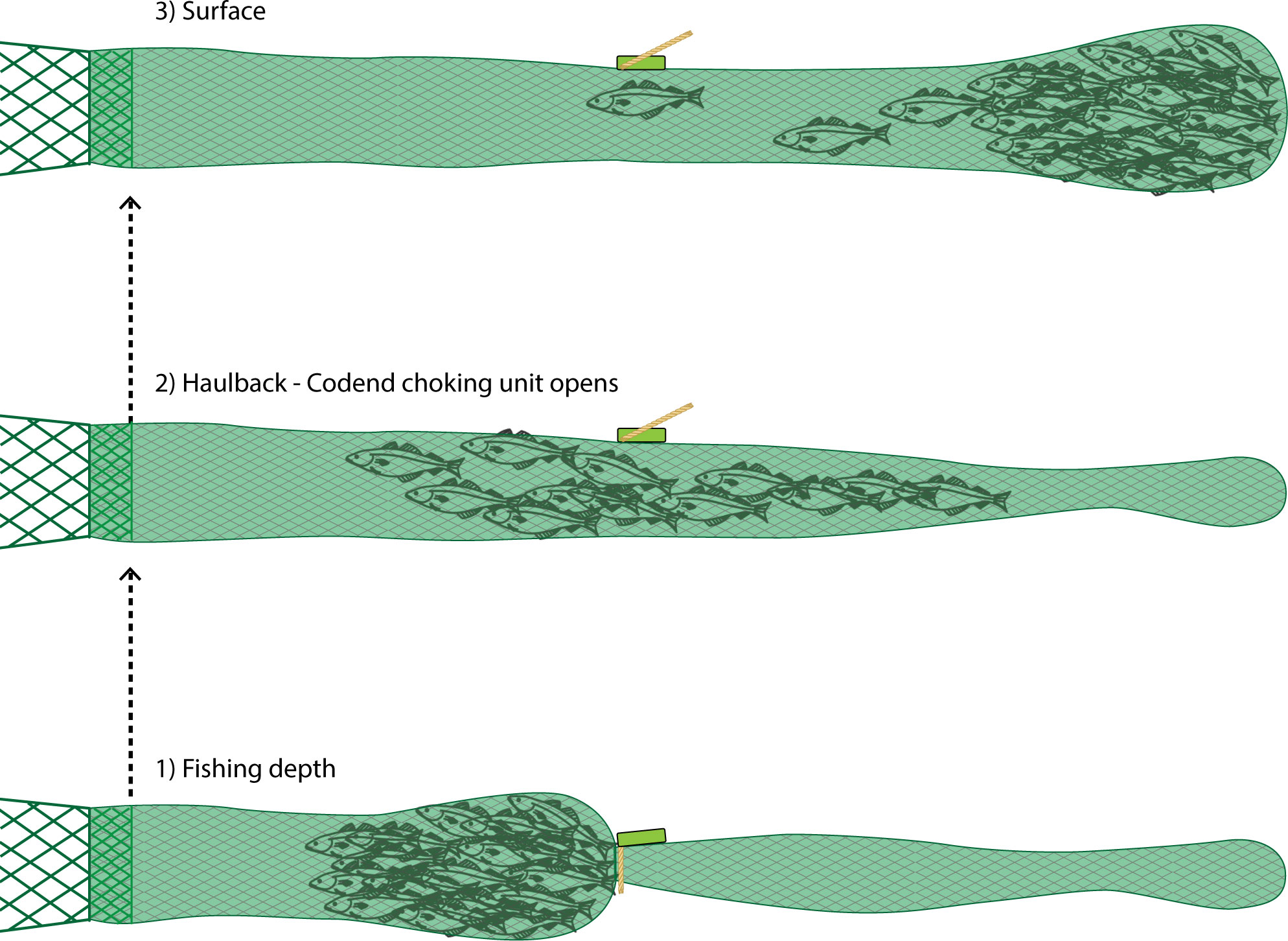
Figure 5 Artistic impression of the depth triggered releaser in operation. (1) catch is retained in the codend ahead of the closed releaser; (2) the trigger depth is reached, and the releaser opens; and (3) the retained catch dissipates into the residual component of the codend.
The 18 mm twisted choking rope is made of a polypropylene and polyethylene mix, with a nominal breaking strength of approximately 5500 kg, was wrapped once around the codend and linked to the release arm on the releaser. At a pre-determined depth during haulback, the release arm is designed to open, freeing one end of the choking rope and allowing the retained catch to move into the residual, empty rear end of the codend.
One releaser was fitted to the codend on all hauls. During cruise 1, its successful operation (i.e. opening and release of the choking rope) was confirmed visually when the codend was recovered after each haul and from an underwater camera during one haul to assess the release time and approximate depth (nearest depth sensor 12 m aft of the releaser). During cruise 2, a camera and time-referenced depth sensor were mounted adjacent to the releaser so that both time and depth of release could be confirmed.
The position of the codend choking unit was varied on each cruise according to the targeted catch size. On cruise 1, the positions were determined by the vessel’s skipper. The results from this cruise were then used to determine where the choking unit should be positioned for cruise 2, namely at 25, 35 and 45 m from the forward end of the codend, aiming for catch sizes of approximately 100, 200 and 400 tons, respectively (Figure 6).
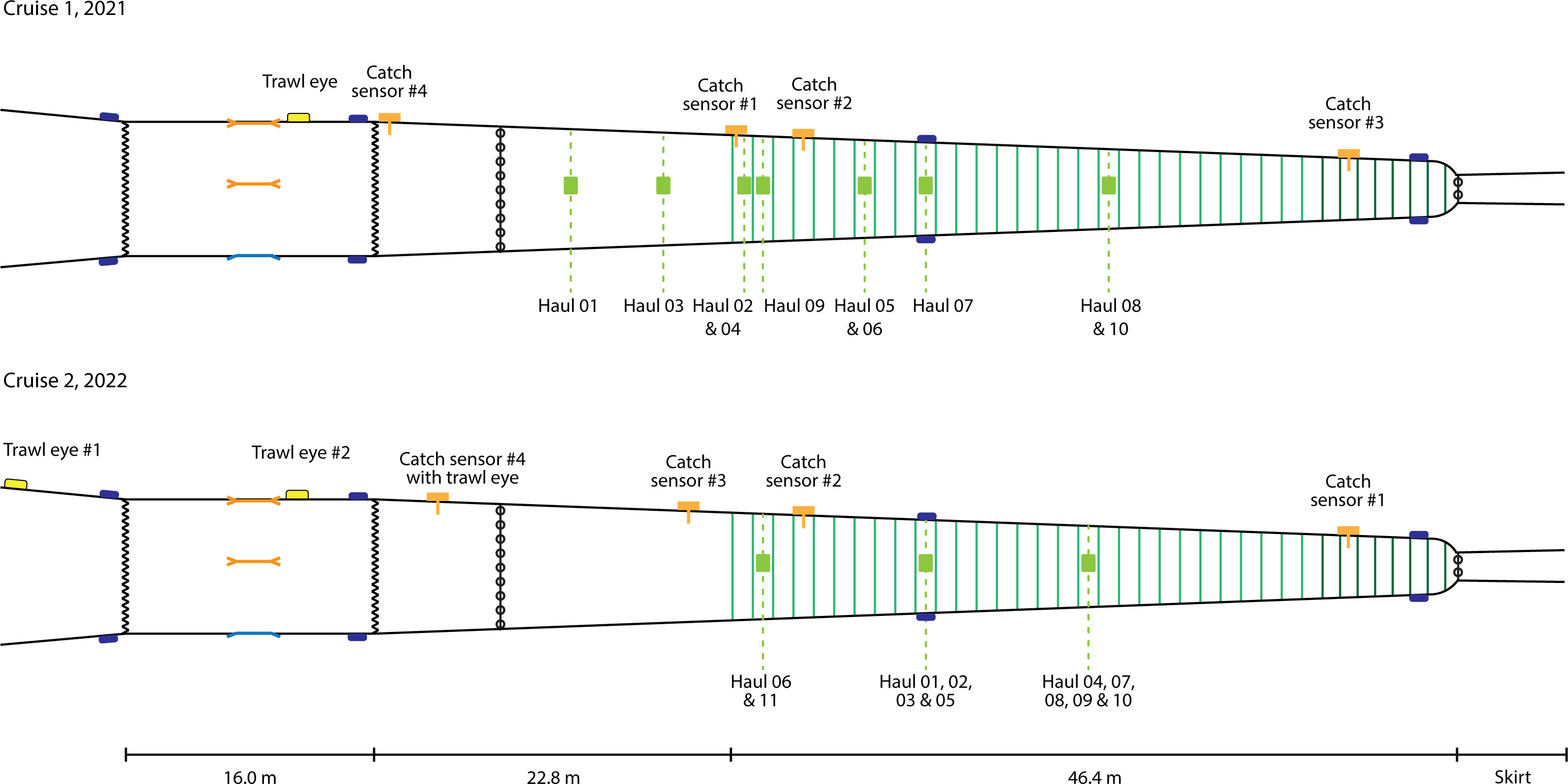
Figure 6 Positions on the codend of the depth triggered releaser and other instruments for cruises 1 (Top) and cruise 2 (bottom). Releaser positions for each haul in both cruises are shown in green (see also Table 2). Also shown are the relative positions of the “Trawl-Eye” echo-sounders (yellow), Catch Sensor units (orange) and depth-loggers (blue).
Following an observed leakage of fish past the choking unit on haul 02-6, a thin restrictor rope (10 mm braided nylon PA, breaking strength ~2080 kg) was placed 1 m ahead of the choking unit on hauls 02-7 to 02-11. The thinner restrictor rope could be tightened much more effectively than the 18 mm choking rope used in conjunction with the releaser, ensuring the codend could be more tightly sealed. A camera was also placed at the end of the codend on hauls 02-7 to 02-11 to verify that fish did not enter the reserve portion of the codend before the choking unit released.
The effect of choking unit position on catch size was assessed with a multiple linear regression model (analysis of covariance, Dobson, 2002), with “cruise” incorporated as a two-level factor (covariates) to investigate if there was a difference between the two cruises.
For assessing the performance of each component of the catch limitation sections, multiple cameras were mounted for visual observations. These provide information on whether fish was lost before catch was built up, direction of escape and confirmation of excess fish being released. They also provide information on the fish-lock effectivity, and in combination with time-synchronized depth sensors, the actual release depth Figure 7.
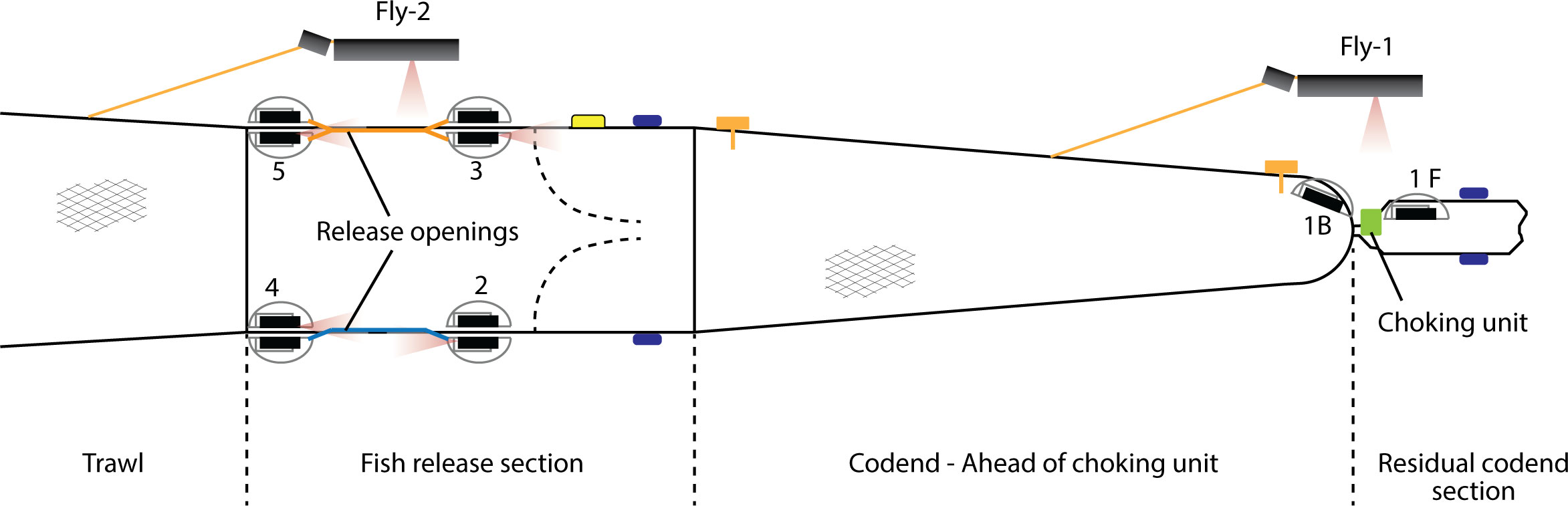
Figure 7 Camera positions on the Catch control system and codend. Post-script F means the camera was forward facing (toward the mouth of the trawl) and post-script B means the camera was backwards facing (towards the codend). The red shaded triangles provide an approximate indication of the illuminating light field in some example positions. See Figures 1-3 for further explanation of the fishing gear components.
For filming the catch limitation system, up to five cameras were mounted in various locations (Table S1 and Figure S7). The cameras were deployed to provide information on fish behavior and the functioning and geometry of the various components of the catch limitation system (fish release section, fish lock, choking unit) but the study was not designed to collect camera data for quantitative analyses (repeated deployment in the same positions for replicate measurements across hauls). For filming the fish release openings and fish locks, the cameras were mounted on the top- and bottom panels both in front and behind the openings. Different camera systems were used: GoPro Hero, “TrawlCam” deep water camera (JT Electric, Fuglafjørður, Faroe Islands) and an in-house, bespoke, low-light sensitive programmable camera, “DarkVision”. Except for the TrawlCam system, which had its own integral housing and support frame, the cameras were encased in 1500 m rated water-proof housings and fitted into bespoke protective steel frames.
For 20 of the 22 hauls, red lights were used for filming. We used Brinyte DIV01V LED dive lights with 120° beam angles, placed inside aluminum houses to ensure they would tolerate the 500 m + fishing depths. The red lights had ~635 nm mean wavelength, ranging from approximately 590 to 660 nm (see Ingólfsson et al., 2021c for specifications). Blue whiting are monochromatic (i.e. have only one visual pigment) with a peak spectral sensitivity at 491 nm and none for wavelengths above ~600 nm (Douglas et al., 1995) and are therefore unlikely to detect the wavelengths used. White lights (wavelengths from 420 to 750 nm) were used on hauls 01-9 and 02-7. Although white lights are more likely to influence fish behavior, they provide wavelengths that have less attenuation, increasing visual range, and are therefore better suited for visual observations of the fishing gear.
Starmon TD depth and temperature loggers (Star-Oddi, Garðabær, Iceland), were mounted on the release section and at several locations along the codend. In 2022, a depth sensor was also mounted adjacent to the choking unit in order to calculate the release depth. The loggers recorded depth every second, clocks synchronized with all other recording instruments including the cameras.
To monitor the geometry and amount of fish in the fish release section and codend in real-time, the codend was equipped with at least one codend echosounder (CE-ES) (cruise 1: one Scanmar Trawl-Eye; cruise 2: two Marport Trawl Explorer echosounders and one Marport Catch Explorer catch sensor with echosounder). The CE-ES gives information about the density of the catch immediately beneath it, in this case in and below the release section. A full codend should be indicated by high densities inside the release section (i.e. red shading on the echogram image) and escaping fish should be seen as marks below the release section (Figure S6). In addition, four “catch sensors” that monitored the expansion in the meshes in the codend were used. In principle, as the codend filled, its expansion would trigger each catch sensor in turn. When the catch sensor that was furthest forward was triggered, this would indicate the codend was almost full, and any excess catch should soon be exiting via the escape openings in the release section.
For each valid haul, a qualitative analysis of the video observations was performed to verify if catch was lost before and after the codend was filled up, as well as monitoring the shape and openness of the escape openings throughout the haul.
During the two research cruises, a total of 21 operational hauls (with catches) were conducted (Table 1). Most hauls (01-1 to 01-10 and 02-1 to 02-6) were conducted at the Porcupine Bank fishing grounds, west of Ireland while hauls 02-07 to 02-11 were taken west of St. Kilda, west of Scotland. The haul durations ranged from 58 minutes to 10.5 hours, with catch sizes of 45 to 412 tons (mean 201.9 tonnes) and catch rates of 12 to 234.6 tons h-1 (mean 57.2 tons h-1). Most hauls successfully reached their target endpoint (i.e. a full codend). However, during cruise 2 there were six hauls that were terminated before the codend was filled. Reasons for early termination included indication of premature release by the choking unit (hauls 02-2 and 02-3), poor catch rate (haul 02-4), bad weather (haul 02-9) or time limitations (haul 02-7). Haul 02-6 was terminated early as the CS-ES and backmost catch sensor indicated leakage of catch through the catch limitation system choke point. Indeed, the haul did have an excessively large catch (267 tons caught, 100 tonnes targeted).
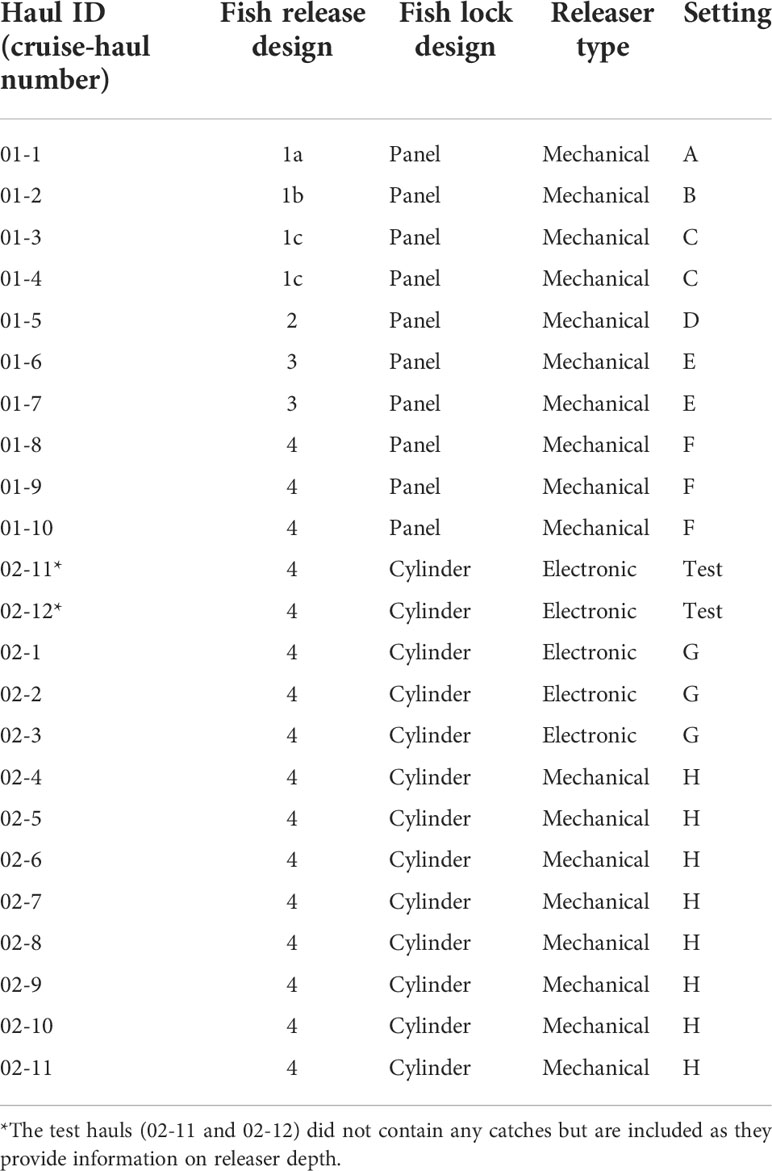
Table 1 Overview of the catch limitation system configurations used in the two cruises.
When fitted to the trawl, all four release section designs were stable and appeared to take up their designed geometry. The only exception was during haul 01-8, when the drag from attaching three cameras at the trailing edge of the bottom escape opening in Rig 4 distorted the bottom panel. The distortion was not evident when fewer cameras were attached.
Throughout all of the reviewed video observations, blue whiting consistently congregated in the upper part of the release section as they passed through. For most of the time, densities observed in the upper part of the release section were low (≤1 fish m-3) to medium (2 - 10 fish m-3), with only very low densities of fish seen passing over the bottom panel (Figure S1). However, when high densities (>10 fish m-3) were observed in the upper part of the release section, there was a proportional increase in density in the lower part (Figure S2).
While fishing and before the codend filled, blue whiting generally passed through the fish release section and into the codend with only minor escapes through openings in the sides and bottom. However, the observed behavior of blue whiting concentrating in the upper part of the release section lead to a continuous and unacceptably high escape rate from large top escape openings of Rig 1a (periods with thousands of fish min-1), but with concurrently very low escape rates from the bottom escape opening (<10 fish min-1, Figure S3). To stem the escapes, loose netting cover panels were fitted to the forward end of the openings (Rig 1b), to form a visual barrier that would not prevent the release of excess catch. However, this also failed to prevent the unacceptably high escape rate from the top opening. Building on these observations, the top escape opening was closed (Rig 1c), and loose netting cover panel over the escape openings which had no apparent effect was removed from the bottom panel. There was no evidence of any substantial increase in the escape rate of fish from the bottom opening as a result. The same excessive escapes from the top opening, with very low escape rate from the bottom panel, were also observed in Rig 2 (2.5 m long half-diamond meshes on all sides), but again losses through the top panel were deemed excessive. Rig 3 had a substantially smaller top opening than Rigs 1 and 2 (one 2.6 m long slot), so the escape rate from the top panel was substantially reduced in hauls 01-6 and 01-7, but remained higher in comparison to the very low escape rate from the bottom panel prior to the codend filling (Figure S4).
Based on these observations, Rig 4 was constructed using a hybrid design of Rigs 1c and 3; where the 2.6 m long slots of Rig 3 were placed in the top and side panels, with the large hexagonal mesh escape opening from Rig 1c inserted in the bottom panel.
In Rig 4, escapes from both the top panel (slot) and bottom panel (hexagonal meshes) were minimal prior to the codend filling (Figure S5). At low to medium densities in the upper part of the release section, which were the most prominent catch densities observed, the typical escape rate was 0 to 15 fish min-1. At high densities, escape rates of between 23 and 65 fish min-1 were observed. No camera observations were made of the slots in the side panels.
The slots in the upper panel usually remained closed for most of the haul, only opening during the haulback phase when there was a reduced flow in the release section and increased tension applied on the fish lock (Figure S4). Therefore, no attempt to estimate escape rate through the release slots was attempted.
Assuming all the escaping fish counted from video were blue whiting with mean weight ~150 g, loss prior to the codend filling is estimated at approximately 117 kg h-1 for medium density catches with escape rates of 13 fish per minute and up to 585 kg h-1, for high density catches where escape rates of up to 65 fish per minute were observed. This represents a loss of approximately 0.2% of the catch, assuming catch rates of 57.2 tons h-1 (mean observed catch rate) for medium density catches, and 234.6 tons h-1 (maximum observed catch rate) for high density catches.
When the codend is full, the release section should allow any excess catch in and ahead of the release section to easily escape. This was evident for Rigs 1 and 2, with massed escapes occurring at approximately the same time that the catch sensors and/or the Trawl-Eye indicated that the codend was full (see section 3.2.4). For Rig 3, as the catch in the codend began to approach the capacity of the choked codend and fish began to accumulate in the fish release section, the slots in both the top and bottom panels opened, forming almost circular escape openings (Figure S4). This facilitated a substantial increase in escapes from the top panel. However, at very high densities, it was suspected that these openings would not allow release of sufficient numbers of fish to avoid excessive crowding and/or abrasive injury.
Rig 4 combines release opening in the bottom panel and release slots in the top and side panels. The slots in the top and side panels provided escape opportunities in the top panel and side panels without leading to substantial loss of fish before the codend filled (Figure S4), while the main route of release was via the large hexagonal meshes in the bottom panel. No hauls with substantial excess catches were observed in either cruise, however unrestricted releases of large numbers of fish were observed during haulback (Figure S6), when the fish lock failed to function correctly (see section 4).
The operation of the panel-type fish lock was observed on video once, in haul 01-3 where this visual observation indicated it worked successfully. During haulback, the catch in the codend moved forward and started to collect at the top of the fish lock. This build-up of catch progressively pushed the panel down, eventually sealing it closed on the bottom panel, thus preventing any substantial loss of catch from the codend during haulback (Figure S7).
The cylinder-type fish lock appeared to be stable during normal fishing operations in cruise 2. However, whenever the codend was known to be full (see section 3.2.4, i.e. hauls 02-1, 02-5, 02-8, 02-10 and 02-11) the ropes connecting the constrictor rope of the fish lock to the selvedges of the fish release section broke, and the fish lock was noted to have spilled forward and at least partially extruded through the bottom escape opening in the release section.
The mechanical releasers used on the codend were open upon retrieval after all 13 hauls during cruise 1. However, a camera was only positioned once to film the release event. During cruise 2, all releases were filmed and depth-referenced in order to determine the depth of release. This documented failures of both the electronic and mechanical releasers during the cruise (Table 2). The electronic releaser opened at or near the specified depth on four of the five deployments (including two test hauls without catches). For the deployments where it released as expected, the maximum discrepancy was 6 m (set to release at 120 m, released at 114 m), average discrepancy just 2.5 m. During haul 02-2, the electronic releaser prematurely opened at a depth of 461.5 m while the target release depth was 120 m. This was suspected during the haul from the early triggering of catch sensor in the reserve section of the codend (see section 3.2.4) and later confirmed from the video and depth sensor data downloaded after the haul.
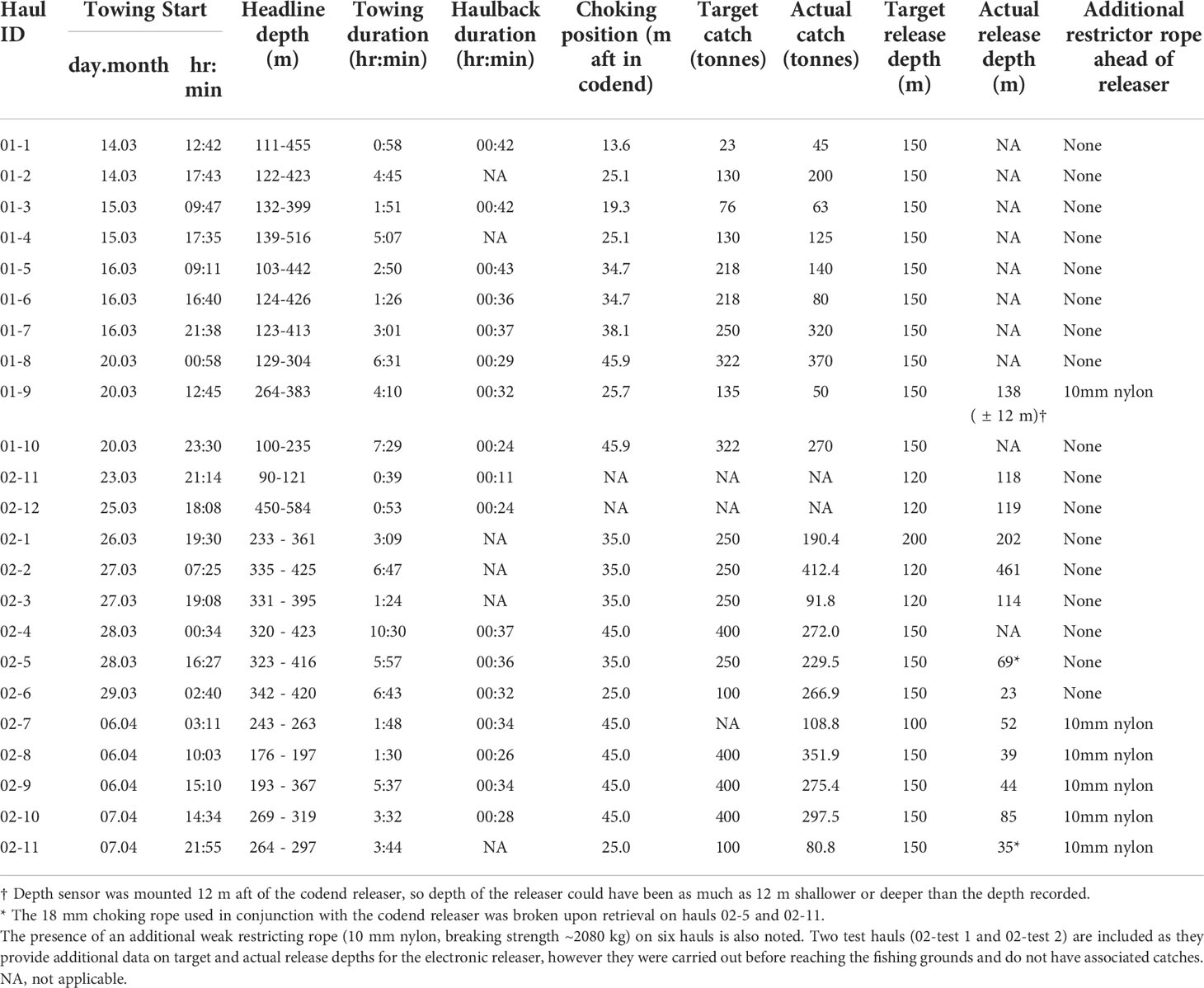
Table 2 Haul summary, including details of towing times and duration, haulback duration, release opening design, codend choking unit position and release depths and both target and actual catch weights.
The one haul from the first cruise with video documentation of mechanical releaser function (haul 01-9) indicates it released at approximately the correct depth, between 126 and 150 m compared with a factory-set release depth of 150 m. Precise depth could not be determined because the nearest depth sensor was mounted 12 m aft of the releaser, meaning the releaser could have been 12 m shallower or deeper than the 138 m recorded by the depth sensor when it released. Tested during cruise 2, the mechanical releasers consistently failed to open at the factory set release depths of 150 m and 100 m. The addition of the 10 mm nylon restricting rope 1 m ahead of the choking point from hauls 02-7 onward could affect the performance of the releasers, although video of a 10 mm nylon restricting rope placed 2 m ahead of the choking point during haul 01-9 shows it broke at ~380 m depth, more than 25 minutes before the releaser opened at ~138 m depth. Unfortunately, the video collected from cruise 2 does not provide clear enough view to determine when the 10 mm restricting rope broke. Thus, only hauls 02-5 02-6 provide reliable information on actual release depth (release depth is unknown for haul 02-4 because the camera battery was exhausted before haulback during this unusually long haul of >11 hours). In both these cases, releases occurred much shallower than the 150 m depth the releaser was set at. During haul 02-5, the releaser opened at 69 m depth and during haul 02-6 at just 23 m depth. During haul 02-6, in addition to releasing late, there was a leakage of fish through the choke point formed by the choking rope, and 267 tons of fish were caught, compared to a target of 100 tons. During haulback on hauls 02-5 and 02-11, the releaser again failed to open at its target depth and the 18 mm diameter choking rope broke at depths of 69.3 m and 34.9 m respectively, presumably due to the force of the expanding swim-bladder gases in the catch.
From cruises 1 and 2, there were 15 hauls that provided informative data on the relationship between codend choking position and catch size and between catch size and calculated codend volume for the chosen releaser position (Table 2). All hauls during cruise 1 were fished to completion (haulback initiated because the skipper believed the target catch was achieved), however six hauls during cruise 2 were not fished to completion due to indications of releaser malfunction (catch registered in the reserve codend before the releaser should have opened; hauls 02-2, 02-3 and 02-6), poor catch rate and other time limitations (hauls 02-4 and 02-7) and bad weather (haul 02-9).
There was a clear relationship between choking rope position on the codend and the actual catch in tons (t = 5.41, p < 0.001, R2 = 0.64 in cruise 1 and 0.95 in cruise 2, Figure 8), with no significant difference between the relationships for the two cruises (t = –0.40, p = 0.70). As anticipated, the resultant catch volume (and weight), generally increased the further aft the releaser was positioned on the codend, as the theoretical volume of the receiving codend increased (Figure S8). However, the resultant valid catch volumes only represented a small proportion of the corresponding theoretical codend volumes (range 0.075 – 0.39, Table 3), indicating packing density in the codend was not 100%. Larger catches generally occupied a higher proportion of the corresponding theoretical codend volume (Figure S8).
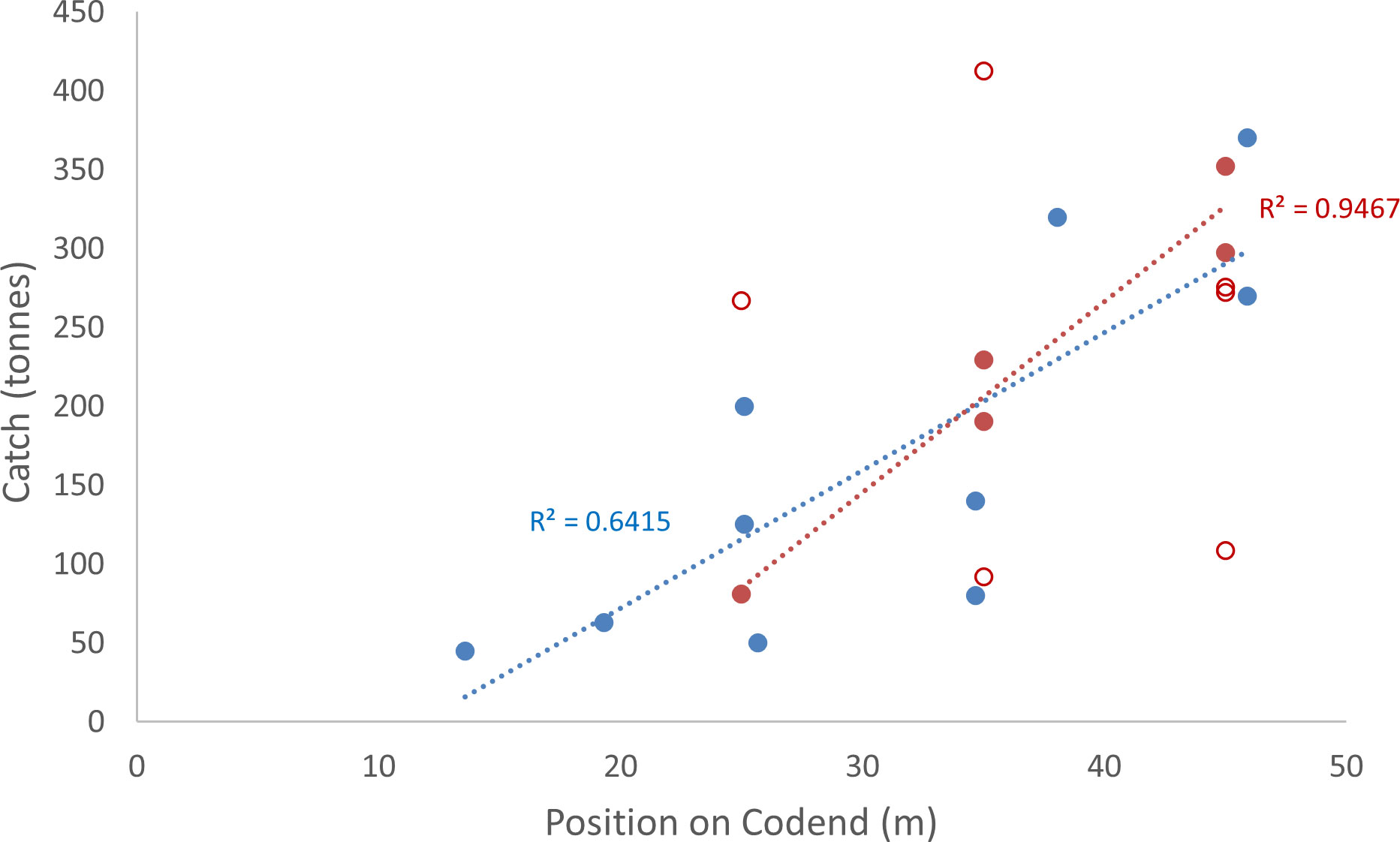
Figure 8 The relationship between targeted catch size (tonnes) and the position (in meters) of the catch limitation releaser relative to the forward edge of the codend. Multiple linear regression analysis determined that catch size increased significantly the further aft the catch limitation releaser was positioned on the codend (t = 5.41; p < 0.001), while there was no significant difference between the relationships for either cruise (t = -0.40; p = 0.699). Blue dots show results from the first cruise and red dots the second cruise. Open circles show hauls where problems with the releasers were experienced and are not included in the regression analysis.
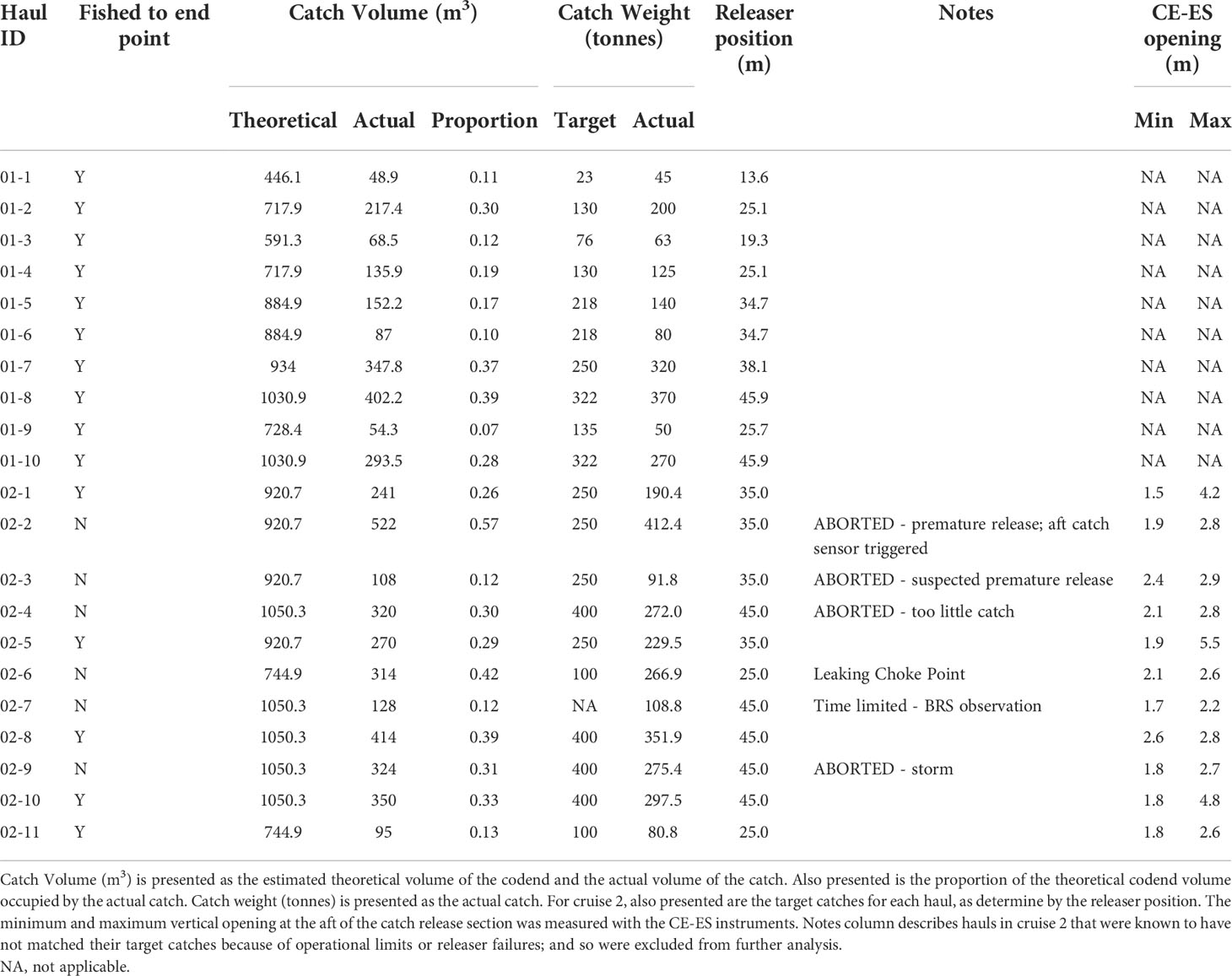
Table 3 Overview of the Catch Volume and weight for each haul, with respect to the position of the catch limitation releaser.
In general, the catch sensors triggered as expected (in reverse order, ahead of the releaser position). A positive and constant signal from the forwardmost catch sensor, along with indications from the CE-ES images that catch was accumulating in, and possibly escaping from, the release section was taken as a definitive signal that the catch limit had been reached. Some catch sensor units failed to trigger in some hauls when catch should have been accumulating at that location (i.e. hauls 01-4, 01-5, 01-6 and 01-7) and/or some sensors triggered apparently prematurely, when no catch should have been accumulating at that location (i.e. hauls 01-3, 01-6 and 01-9). This list of stations includes all of the designs of the catch release section (large hexagonal meshes, large diamond half-meshes, slots, hybrid hexagonal meshes and slots), suggesting performance of the catch sensors was not related to design of the release sections. In three hauls in cruise 1 (01-4, 01-5 and 01-7), haulback was started before a positive consistent signal had been received from the forwardmost catch sensor because the Trawl-Eye indicated that high densities of fish were accumulating in the release section.
The aftmost catch sensor was always positioned aft of the releaser, so it should never trigger before the releaser had opened (i.e. typically >20 minutes after haulback). However, early triggering events were observed on six hauls (i.e. 01-6, 02-1, 02-3, 02-4, 02-5 and 02-6), suggesting some catch was leaking past the choke-point formed by the releaser choking rope and accumulating at the end of the codend. This was confirmed during haul 02-6, when a camera was positioned to view this catch sensor to assess its functionality and observed catch collecting at that position, as well as the catch sensor becoming tensioned at a time corresponding to when the trigger signal was received by the vessel.
The CE-ESs consistently provided interpretable information on the density of catch in the release section and when excess catch appeared to be escaping beneath the release section, as well as the height of the release section itself. During cruise 1, it was realized that this information was potentially very informative about when the catch limit had been reached. Therefore, in cruise 2, it was systematically recorded and demonstrated that information about the height of the release section was particularly informative and reliable (Table 3). In all catches that reached their end point (i.e. the catch limitation limit), the height of the release section was substantially greater than the baseline height range (2.0 to 2.7 m), with heights before hauling ranging from 2.9 to 5.0 m. The other consistent signal from the CE_ES systems was an occluded signal from the CS no. 4 unit, because of the very high density of catch behind the release section (Figures S10 and S11). Indications that excess catch was passing out of the release section were less consistent and reliable. Although camera observations indicated that escape rates increase just prior to haulback, in association with high catch densities inside the release section (e.g. Haul 02-5 39-42 fish min-1 compared to 14 fish min-1 at periods of lower catch density earlier in the haul; Figure S11), it was difficult to differentiate these signals as a definitive increase on the CE-ES echogram. Finally, the strength of the echogram density signal at the release section was also inconsistent across the five hauls that did reach endpoint. However, it is notable that the two hauls with high density echogram signals (haul ID 02-5 and 02-8) did have catches closer to their target (Table 3), suggesting that maybe waiting a little longer for the catch density in the release section to increase before beginning to haulback would have increased the catch in hauls 02-1, 02-10 and 02-11.
This section describes e.g. how the standard catch sensors performed. They were not being tested per-se during the experiment but provided real-time feedback on the trawl’s fullness. The purpose of describing them here is to describe their sometimes unreliable performance, but how they were used in conjunction with the trawleye sensors to decide when to stop fishing because the target catch had likely been caught.
This present study has demonstrated the successful operation of a novel catch limitation system for the deep-sea blue whiting pelagic trawl fishery. The system can effectively limit the volume of the catch to the level set by the skipper, allowing excess catch to escape freely at the fishing depth and during ascent. The study demonstrates the practical application of escape openings, fish lock and adjustable codend capacity to achieve targeted catch sizes in a fishery operating at a much greater scale of fishing gear, fishing depth, and catch sizes than previous studies (Grimaldo et al. (2014); Ingólfsson et al. (2021a)). The full-scale field tests indicate that the developed system may be a practical solution to avoid excessively large catches that lead to discard as a result of burst codends in the NE Atlantic blue whiting pelagic trawl fishery, and thereby contribute to a more sustainable and responsible fishery. The present study demonstrates the practical application of escape openings, fish lock and adjustable codend capacity to achieve targeted catch sizes in a fishery operating at a much greater scale of fishing gear, fishing depth, and catch sizes than previous studies.
The first, and most critical component of the catch limitation system presented is the fish release section, which must minimize the loss of target catch up until the codend is full, but then ensure any excess catch freely escapes. Designs with panels of large meshes in the top and side panels released much fish before the codend filled, and would lead to decreased catch rates, higher consumption of fuel per kg of fish caught, and in general poor uptake by the fleet. A section relying just on slot openings, on the other hand, is likely to have limited capacity to release the necessary quantity of fish and the slots opened fully only during heaving. In order to be successful, catch limitation must be achieved at the fishing depth when fish are actively entering and passing back in the trawl. Our final and most promising design, Rig 4, incorporated large hexagonal meshes in the bottom panel and slots in the sides and top to conform with these criteria. This functionality was facilitated by exploiting a behavior pattern that we observed consistently for blue whiting: predominantly congregating in the upper part of the release section. This minimized the escape of this target species through the large release opening in the bottom panel, while the smaller escape slots in the upper and side panels remained closed preventing any escapes from these routes until the codend was full and the catch built up around the fish lock.
The successful and unrestricted release of excess catch from both the top and bottom release openings when codend was full was confirmed (Figures S4 and S6). However, these cruises have not observed the massive catches sometimes achieved in this fishery (catch rates of >500 tons h-1), so we have no empirical evidence of how effective the release section would be at expelling excess catches in such circumstances.
All information we have indicates discards due to fish being damaged are rare in this fishery. All fish captured during this study were destined for industrial production of fish oil and fish meal, therefore, physical damage sustained as a result of compression in an over-full codend does not affect the value of the fish landed to any significant extent. No attempts are made to sort out and discard damaged fish at sea. In fact, it would be extremely difficult to grade fish at sea as they are pumped directly on board and into holding tanks at rates of more than 5 tons per minute (roughly 500 individuals per second, assuming 150 g average weight).
Both tested designs of fish lock successfully permitted free passage of the catch into the codend during the normal fishing operation. However, only the inclined panel lock was observed to consistently prevent loss of fish from the catch once the codend was full. The ropes connecting the constrictor rope of the cylinder design fish lock frequently broke, allowing the front of the lock to come forward into the fish release section. Due to the expected large catch sizes in the blue whiting fisheries, we applied a weak link of 10 mm ropes to connect the constrictor rope to the selvedges of the fish release section in order to circumvent the risk of bursting the netting. Frequent breakage of the ropes, however, causes concern. If type 2 fish lock is to be used, the necessity of a weak link must be reconsidered. One reason for the great force may be the late release of the codend choker on most hauls, which subjected the catch being held by the fish lock to greater expansion than the fish lock had been designed for, The reason for changing fish locks between cruise 1 and 2 was due to promising results with the cylinder design, and problems associated with the inclined panel design in another study (Ingólfsson et al., 2021a), where inclined panels, proved unsuccessful for inhibiting loss of fish at the surface. In that study, involving Atlantic cod (Gadus morhua), the surface loss of fish was likely a consequence of catch-volume increase due to swim-bladder expansion, causing the panel to protrude through the escape openings of the catch limitation device. Since we expect a similar challenge in the blue whiting fishery, we have greater faith in a cylinder-type fish lock similar to what Grimaldo et al. (2014) and Ingólfsson et al. (2021a) have used with catch limitation devices in fixed-volume codends. This type of fish lock utilizes the expanding forces of the codend to choke the fish lock cylinder so that the codend is closed in front. Another benefit of using a cylindrical fish lock is that the distance from the fish lock to the escape opening is negligible, which in turn minimizes the risk of surplus fish accumulating between the openings and the fish lock. When using the releaser, however, the catches are displaced further back in the codend, away from the escape openings. This releases pressure on the fish lock, and the simpler inclined panel solution may be preferable. In further experiments with the catch limitation system, the work needs to focus on the fish lock design to avoid spillage of fish during haulback.
In combination with the other components of the catch limitation system, the releaser has been demonstrated to enable controllability over catch size. Moreover, the skipper reported anecdotally that haulback was generally far more controlled with the releaser in place, with less tendency for an uncontrolled buoyant ascent. Studies have shown that blue whiting codends may become highly buoyant on ascent with ascent rates of more than 4 ms –1 and the codend orientated vertically (authors; in prep.). This buoyancy is likely caused by trapped swim-bladder gas. By opening the choking strap during ascent, the catch is transferred to the residual codend space and during that process, trapped gas escape, reducing the buoyancy of the codend. However, there were some issues that would need to be resolved before the releaser could be routinely used in a commercial fishery. Firstly, the releaser and choke point have the potential to prematurely release and/or leak catch into the residual codend. This is potentially hazardous for the vessel and wasteful of the living resource, if the catch taken is far greater than planned. Secondly, late release of releaser could undermine the benefit of release at depth for avoiding uncontrolled buoyant ascent of the codend and explosive decompression of the catch. The electronic releaser tested in 2022 appears to have resolved this, assuming that issue of premature release can be resolved. After the second cruise, the mechanical releaser prototypes were inspected by the developer. A fault was found, and modifications made to ensure stable release at correct depth. Further work is required to develop and test this functionally, including determining the optimal release depth for minimizing the codend ascent rate. Assuming that both releaser versions can be improved so that consistent release depth is achieved, they have their pros and cons. While the mechanical releaser needs no recharging, we have no means to verify release depth after retrieval. Also, due to technical constraints, maximum release depth is 150 m, and only during ascent. While the electronic releaser requires charging before each trip, it can be programmed to release at whatever depth upon ascent or descent, release depth can be verified at the end of each haul. In addition, with further developing work, direct two-way communication to vessel can be made possible.
The relationship between releaser position on the codend and resultant catch size was far more consistent for the valid hauls from cruise 2 than for the cruise 1 data (R2: 0.95 and 0.64, respectively), likely because known problems with catch control were deliberately removed from the dataset for cruise 2. Indeed, the spread of the invalid hauls (open circles in Figure S8) are at least as variable as the cruise 1 data. This suggests that the greater variation in cruise 1 may be the result of catch leakage and prematurely terminated hauls, which were not appreciated at the time.
This study also demonstrated that with respect to determining when the catch limit had been reached, and excess catch was likely escaping via the release openings, the combination of both the catch-sensors and the codend echosounders (CE-ES) proved to be highly informative. Although there were some inconsistencies with the correct triggering of catch sensor units, it was demonstrated that with careful positioning and maintenance of the units, the progressive build-up of catch inside the codend could be monitored relatively reliably. In particular, the importance of locating at least one catch sensor on the residual codend (i.e. aft of the releaser) was highlighted for identifying the occurrence of leakage of catch from the releaser choke point. It is recommended that this should be standard practice when using the catch limitation system in the future, to avoid unintended excessively large catches, which would not only be wasteful of a living resource but could prove potentially hazardous for the vessel and its crew.
The codend echosounders consistently provided interpretable information on the density of catch in the fish release section, the vertical dimensions of the release section and, most informatively, when excess catch appeared to be escaping beneath the release section. In general, as a definitive signal that the catch limit had been reached was determined by a positive and constant signal from the forwardmost catch sensor, along with indications from the CE-CS that the diameter of the release section had expanded, that it contained a high density of fish, and that catch was escaping beneath the release section. Such information enables the skipper to end the haul in a timely fashion and thus improves the efficiency of the fishing operations with respect to time and fuel usage. Furthermore, by minimizing the number of fish that encounter the trawl before escaping via the release openings as excess catch, the risk of collateral/unaccounted mortality resulting from injurious contact and other capture related stressors is also minimized (Broadhurst et al., 2006; Breen et al., 2020).
All the behavioral observations were made using cameras and red (590 nm – 660 nm) or far-red (>660 nm) lights. Although blue whiting spectral sensitivity (~400-600 nm; peak: 491 nm; Douglas et al., 1995) suggests this species was unable to see these artificial lights, there is potential for a small overlap in sensitivity at the 590 – 600 nm range. In general, our behavioral observations supported the assumption that the blue whiting were unable to see the illuminating light, with frequent occurrences of individual fish failing to avoid obstacles in their path. However, on some occasions there was evidence that the light may have been affecting behavior. For example, during haul 03 (Rig 1c), when a camera and red light was placed looking forward over the bottom release opening (position 2iF), we observed unusually high escape rates (up to 65 fish min-1, Figure S2). It can therefore not be ruled out that the forward-facing lights inside the release section may have affected the escape behavior. To be certain of the utility of the catch limitation system, it should be tested in a commercial fishing scenario without cameras and lights on the trawl. Rudimentary observations of escape behavior could be made using appropriately positioned codend echo-sounders to confirm that fish are only escaping en masse when the codend is full.
While blue whiting is the only pelagic fishery in the region for which excessive catches are presently a problem, the concept and aspects of the design can, in theory, be applied to other pelagic fisheries. The trawls that are used in the blue whiting fishery are of similar design as trawls used in other pelagic fisheries, e.g. for capelin (Mallotus villosus, mackerel (Scomber scombrus), herring (Clupea harengus) and redfish (Sebastes spp.). They differ in sizes, since smaller trawls (1500-1600 m circumference) are used to be able to obtain greater towing speed for e.g. mackerel and herring than required for blue whiting (A. Sæstad, Egersund Trawl and T. Hemnes, Åkrehamn trålbøteri, personal communication). Therefore, the catch limitation concept developed and tested in the present study should in theory work in other fisheries, given that it could be adapted to the behavior of the targeted fish.
In conclusion, the catch limitation device, Rig 4, successfully limit catches, releasing excessive fish with negligible loss during the fishing operation before the codend was full. We believe that the solution can significantly reduce the risk of burst codends and discarding of excess fish, thereby making the fishery more sustainable and profitable by ensuring certification of the fishery. Avoidance of extreme catches and controlled codend ascent also enhance the safety of fishermen. Further work, however, is needed on the design of fish lock, as well as the depth triggered releasers for reliable release of the codend choker. Determination of the optimal release depth for the choker also need further investigation.
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
All author have provided substantial contribution to conception and design of the work, drafting and critical revision of the manuscript and approve the final version for submission. All authors agree to be accountable for all aspects of the work in ensuring that questions related to the accuracy or integrity of any part of the work are appropriately investigated and resolved. ÓI: project leader, funding acquisition, conceptualization, writing of initial MS, editing. MB: cruise leader, data analysis, conceptualization, writing of initial MS, and editing. SR: cruise participant, conceptualization, writing of initial MS, and editing. MS: conceptualization, writing of initial MS, and editing. TJ: funding acquisition, conceptualization, writing of initial MS, and editing. DL: conceptualization, cruise participant, cruise leader, and editing and proof reading. JS: conceptualization, cruise participant, and editing and proof reading. LK: conceptualization, cruise participant, technical drawings, and editing and proof reading. SH: conceptualization, cruise participant, construction of technical solutions, and editing and proof reading. HP: conceptualization, cruise participant, and editing and proof reading.
This work was jointly funded by the Norwegian Fisheries Directorate, the Norwegian Seafood Research Fund (project number 901542) and the Institute of Marine Research. The project and authors are grateful to the governments and authorities of Ireland and the United Kingdom for granting permission to conduct this research in their territorial waters. The authors are indebted to the skipper Anders Klovning and crew of FV Vikingbank, who were very supportive and resourceful throughout the cruise. The catch control rigs were designed in collaboration with industry representatives and manufactured by Åkrehamn Trålbøteri AS (rigs 1 and 3) and Egersund Trål AS (Rig 2).
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fmars.2022.1011862/full#supplementary-material
Bjørndal T., Ekerhovd N.-A. (2014). Management of pelagic fisheries in the north East Atlantic: Norwegian spring spawning herring, mackerel, and blue whiting. Mar.Resour. Econ 29 (1), 69–83. doi: 10.1086/676286
Breen M., Anders N., Humborstad O.-B., Nilsson J., Tenningen M., Vold A. (2020). “Catch welfare in commercial fisheries,” in Fish welfare. Eds. Kristiansen, Fernø, Pavlidis, Van de Vis (Cham: Springer). doi: 10.1007/978-3-030-41675-1_17
Brinkhof J., Olsen S. H., Ingólfsson Ó.A., Herrmann B., Larsen R. B. (2018). Sequential codend improves quality of trawl-caught cod. PloS One 13, 10. doi: 10.1371/journal.pone.0204328
Broadhurst M. K., Suuronen P., Hulme A. (2006). Estimating collateral mortality from towed fishing gear. Fish Fish. 7 (3), 180–218. doi: 10.1111/j.1467-2979.2006.00213.x
Douglas R. H., Partridge J. C., Hope A. J. (1995). Visual and lenticular pigments in the eyes of demersal deep-sea fishes. J. Comp. Physiol. A. 177, 111–122. doi: 10.1007/BF00243403
France 24 (2022) NGO Files complaint over dead fish deluge off French coast. Available at: https://www.france24.com/en/live-news/20220208-ngo-files-complaint-over-dead-fish-deluge-off-french-coast.
Goudey C. A., Randazzo N. (2001). A preliminary evaluation of stretch-mesh catch controls (USA: Project Summary. Northeast Consortium). Available at: https://apps-nefsc.fisheries.noaa.gov/coopresearch/pdfs/Goudey_Soft_Trawl_Final_Report.pdf.
Grimaldo E., Sistiaga M., Larsen R. B. (2014). Development of catch control devices in the barents Sea cod fishery. Fish. Res. 155, 122–126. doi: 10.1016/j.fishres.2014.02.035
ICES (2021). Working group on widely distributed stocks (WGWIDE). ICES scientific reports, (Copenhagen: ICES (International Council for the Exploration of the Sea)) 3, 874. doi: 10.17895/ices.pub.8298
Ingólfsson Ó.A., Humborstad O.-B., Ferter K., Rosen S. (2021a). Development and evaluation of dynamic catch control devices in the demersal seine fisheries for cod (Gadus morhua). J. Ocean Techn. 16 (2), 93–106.
Ingólfsson Ó.A., Humborstad O.-B., Løkkeborg S. (2021b). Surface selection of haddock and cod in the Norwegian demersal seine fisheries. ICES J. Mar. Sci. 78 (4), 1508–1518. doi: 10.1093/icesjms/fsab055
Ingólfsson Ó.A., Jørgensen T., Sistiaga M., Kvalvik L. (2021c). Artificial light improves size selection for northern shrimp (Pandalus borealis) in trawls. Can. J. Fish. Aquat. Sci. 78 (12), 1910–1917. doi: 10.1139/cjfas-2020-0458
Pol M., Chosid D. (2012). “A low-cost, underwater self-closing codend to limit unwanted catch,” in Report of the ICES-FAO working group on fishing technology and fish behaviour (WGFTFB) (Lorient, France: ICES CM 2012/SSGESST:07), 206 pp.
Rosen S., Ingólfsson Ó.A., Jørgensen T., Kvalvik L. B. K., Saltskår J. (2019). Fangstkontroll i kolmuletrål – forstudie (in Norwegian with English summary) (Bergen, Norway: Insititute of Marine Research), 1893–4536.
Sistiaga M., Grimaldo E. (2012). “Development of catch control devices in trawl fisheries,” in Report of the ICES-FAO working group on fishing technology and fish behaviour (WGFTFB)(Lorient, France: ICES) 206 pp. ICES CM 2012/SSGESST:07.
Standal D. (2006). The rise and decline of blue whiting fisheries – capacity expansion and future regulations. J. Mar. Pol. 30 (4), 315–327. doi: 10.1016/j.marpol.2005.03.007
Stewart P. A. M., Robertson J. H. B. (1985). Attachments to cod-ends. Scott. Fish. Res. Rep. 33, 15.
The Guardian (2022) Shock in France after giant trawler sheds 100,000 dead fish off coast. Available at: https://www.theguardian.com/environment/2022/feb/05/shock-in-france-after-giant-trawler-sheds-100000-dead-fish-off-coast (Accessed September 22, 2022).
Keywords: catch limitation, blue whiting (Micromesistius poutassou), pelagic trawl fishery, discard, unaccounted mortality
Citation: Ingólfsson ÓA, Breen M, Rosen S, Sistiaga M, Jørgensen T, Lilleng D, Saltskår J, Kvalvik L, Hannaas S and Pettersen H (2022) A catch limitation device to avoid excessive catches in the blue whiting (Micromesistius poutassou) Northeast Atlantic pelagic trawl fishery. Front. Mar. Sci. 9:1011862. doi: 10.3389/fmars.2022.1011862
Received: 04 August 2022; Accepted: 13 October 2022;
Published: 28 October 2022.
Edited by:
Valentina Melli, Technical University of Denmark, DenmarkReviewed by:
Maria Flavia Gravina, University of Rome “Tor Vergata”, ItalyCopyright © 2022 Ingólfsson, Breen, Rosen, Sistiaga, Jørgensen, Lilleng, Saltskår, Kvalvik, Hannaas and Pettersen. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Ólafur Arnar Ingólfsson, b2xhZnVyLmluZ29sZnNzb25AaGkubm8=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.