 Febrianto W. Utama1
Febrianto W. Utama1 Xavier Hoenner1
Xavier Hoenner1 Britta Denise Hardesty1
Britta Denise Hardesty1 David Peel1
David Peel1 Jessica H. Ford1Vanessa Adams2
Jessica H. Ford1Vanessa Adams2 Chris Wilcox1*
Chris Wilcox1*- 1CSIRO Oceans and Atmosphere, Hobart, TAS, Australia
- 2Discipline of Geography and Spatial Sciences, University of Tasmania, Hobart, TAS, Australia
Protein from fish is essential for feeding the world’s population and is increasingly recognized as critical for food security. To ensure that fisheries resources can be sustainably maintained, fisheries management must be appropriately implemented. When logbook and landing records data are not complete or are incorrect, it is challenging to have an accurate understanding of catch volume. Focusing on Indonesian longline vessels operating in the Indian Ocean from 2012–2019 (n = 1124 vessels), our aims were to (1) assess compliance through identification of landing sites and potentially illicit behavior inferred by interruptions in VMS transmission, and (2) understand how the fishery operates along with quantifying the spatio-temporal distribution of fishing intensity by applying a Hidden Markov Model, which automatically classified each VMS position as fishing, steaming and anchoring. We found vessel compliance gaps in 90% of vessels in the dataset. Compliance was questionable due both to the widespread occurrence of long intermissions in relaying VMS positions (mean = 17.8 h, n = 973 vessels) and the use of unauthorized landing sites. We also observed substantial changes in fishing effort locations among years. The introduction of regulatory measures during the study period banning transshipment and foreign vessels may be responsible for the spatial shift in fishing activity we observed, from encompassing nearly the whole Indian Ocean to more recent intense efforts off western Sumatra and northern Australia.
Introduction
Protein from fish is essential for feeding the world global population and is increasingly recognized as critical for food security. Annually, seafood consumption per capita has increased from 9.0 kg in 1961 to 20.5 kg as of 2018 (FAO, 2020). Accordingly, it has been projected that by 2030, about 35–40 million tonnes of fish will be required annually to satisfy global demand (Delgado et al., 2003). However, wild fish stocks are increasingly depleted, as demonstrated by the consistent reduction in the proportion of stocks that are biologically sustainable, from 90% in 1974 to 65.8% in 2017 (FAO, 2020). This downward trend is largely the result of insufficient or ineffective fisheries management, leading to overfishing and illegal fishing (Mora et al., 2009). It has also been noted that environmental degradation and climate change are major forces affecting the world fish populations (Rijnsdorp et al., 2009).
Recent reviews have highlighted a range of key variables for effective fisheries management. The three most important features included quality of stock assessments, limits to fishing pressure, and the quality of enforcement (Melnychuk et al., 2017). Effective fisheries management is critically dependent on reliable data on fisheries catch and effort, the two key variables that underpin the measurement and control of harvest, and the resulting outcomes for sustainability. While seemingly straightforward to measure, even quantities as basic as fisheries catches potentially suffer from significant uncertainty, potentially due to underreporting (Pauly and Zeller, 2016).
These issues are reflected in Indonesia’s Indian Ocean tuna fisheries, which are managed through a mix of domestic regulations and international measures under the Indian Ocean Tuna Commission (IOTC). In Indonesia, lack of fisheries management, law enforcement and lack of awareness of fishery stakeholders have been raised in a review by the Indonesia National Development Board as the main obstacles to the establishment of sustainable fisheries practices (Badan Perencanaan Pembangunan Nasional, 2014). Underpinning these shortcomings in management is the lack of consistent and reliable data on fish catch and effort (Badan Perencanaan Pembangunan Nasional, 2014).
Fishing catch and effort by Indonesian vessels is estimated by the Ministry of Marine Affairs and Fisheries (MMAF), typically using handwritten fisheries logbooks, validated against information reported from independent fisheries observers. All vessels greater than 5 Gross Tonnes (GT) are required to submit fisheries logbook data to their relevant port authority, which includes fishing gear, coordinates of fishing area, month/season, species and volumes from bycatch and discard catch, ecological related species (ERS), hook rate, and catch per unit effort (CPUE). Catch volumes from logbook records are visually validated against vessel monitoring system (VMS) tracking data, but also manually evaluated against fishing gear productivity, species composition, landing port and the numbers of sets with days at sea.
Skippers nonetheless seldom complete logbooks while operating at sea; logbooks are instead typically documented by an agent at landing facility (Proctor et al., 2003). Through the Indonesian Regional Observer Scheme, onboard observers collect data such as number of hooks and sets, fishing ground location, and species composition; however, their number has been steadily decreasing from 2003 to 2018, to the extent that logbook validation has become a growing issue (Fahmi et al., 2019). Furthermore, handwritten logbook data is degraded by many inconsistencies, such as spelling errors, non-standard naming protocols, inappropriate data format and missing data (Sunoko and Huang, 2014; Marza, 2017; Yuniarta et al., 2017; Pramoda and Putri, 2018). These errors compound to produce low accuracy data, to the extent that the estimated catch volumes have been deemed invalid (Badan Perencanaan Pembangunan Nasional, 2014). This issue with data availability and quality is such that even the precise location of the Indonesian longline fleet’s fishing grounds remains obscure (Mertha et al., 2017). To address the latter issue, Indonesia introduced its own electronic logbook system in 2017. However, obtaining accurate catch records remains problematic, thus emphasizing the need for alternate approaches to monitor compliance and fishing activities for vessels while at sea.
Vessel monitoring systems (VMS) are a satellite-based surveillance technology used to monitor registered fishing vessels and gain a better understanding of fishing effort in space and time. While VMS was initially designed to support resource management and enforcement of lawful activities, it is increasingly being used to analyze fishing behavior (Witt and Godley, 2007; Walker and Bez, 2010; Bez et al., 2011; Russo et al., 2016), and locate fishing grounds (Gerritsen and Lordan, 2011; Hintzen et al., 2012; Jennings and Lee, 2012; Lambert et al., 2012; Joo et al., 2015). Despite the limited amount of information transmitted by VMS units (i.e., vessel ID, datetime, GPS position) which does not include any detail on vessel activity or gear status, statistical approaches such as Hidden Markov Models (HMM) are able to accurately predict vessel behavior (Vermard et al., 2010; Peel and Good, 2011; Joo et al., 2013; Charles et al., 2014).
In the present study we applied Hidden Markov Models to the VMS data for the Indonesian longline vessels operating in the Indian Ocean to estimate the temporal and spatial patterns of fishing effort. The system we developed is based on an automated workflow, which starts with raw VMS data and ends with data segregated by vessel and trip, and labeled with a type of activity for each VMS position. To fill in the paucity of information regarding the at-sea activity of Indonesian tuna long liners our study aimed to: (1) estimate the spatial and temporal distributions of fishing effort across the fleet, (2) demonstrate the value of statistical modeling in moving from manual inspection of VMS data to automated processing, and (3) identify two potential non-compliant behaviors, namely, landing catch at unauthorized ports and disabling VMS transmissions while at sea. We discuss our findings in the context of regulatory drivers and opportunities to deliver intelligence to field inspectors in order to improve efficiency in fisheries management.
Materials and Methods
Vessel monitoring systems data were obtained from MMAF for the period 2012–2019. This data encompassed all vessels operating in the Indian Ocean during the time period, and included hourly transmission of VMS ID, timestamp, position (latitude and longitude), instantaneous speed, instantaneous bearing, and vessel identity. All vessels < 30 Gross Tons (GT), which are not required to carry VMS, and those fishing with gears other than longline were removed before analysis. To improve the accuracy of our assessment of fishing effort we removed VMS records associated with the following conditions: individual vessels with less than 10 VMS transmissions, points associated with speed outliers (i.e., > 30 km.h–1), duplicate VMS data points, and transmissions with missing GPS coordinates. For each vessel, the distance, time and speed between consecutive positions was calculated.
To automatically discriminate fishing behavior from individual VMS positions, we first segregated each vessel’s tracking data into consecutive trips at sea. The start and end of a trip, respectively, corresponds to the first position after the vessel has left port, and the last VMS position before entering to port, regardless of whether it returned to the same port. Port identification for each vessel was initiated by calculating the distance from each position to the nearest port or coastline. To identify ports not listed in the national register, groups of VMS positions with near-zero speeds near land with were used to identify additional ports. We found these groups by rounding VMS positions to 0.1-degree latitude and longitude for all positions within 4 km of land. We then counted the number of positions in each 0.1-degree grid cell associated with speeds < 1 km.h–1. If a given cell had 10 or more of those coastal slow-speed VMS positions, our algorithm inferred the presence of a port within that grid cell. Once all potential ports were thus identified for a given vessel, VMS locations were assigned as being in port if within a 4 km radius of a predicted port and each trip was numbered sequentially. We additionally flagged VMS positions associated with a temporal gap in transmission interval if the time difference between consecutive VMS positions was greater than 4 h and the vessel was at sea. We subsequently summed the number and duration of gap occurrences per one-degree grid cell to identify spatial hotspots of dubious activity.
To estimate fishing effort and obtain an overview of how the fishery operates, we first used the above described pre-processed VMS data to generate summary statistics including number of trips, trip duration, distance traveled, and port entered. We then used a hidden Markov model (HMM) to automatically categorize vessel behavior at each position into one of the following three states using the computed vessel speed: steaming, fishing, or anchoring (Figure 1).
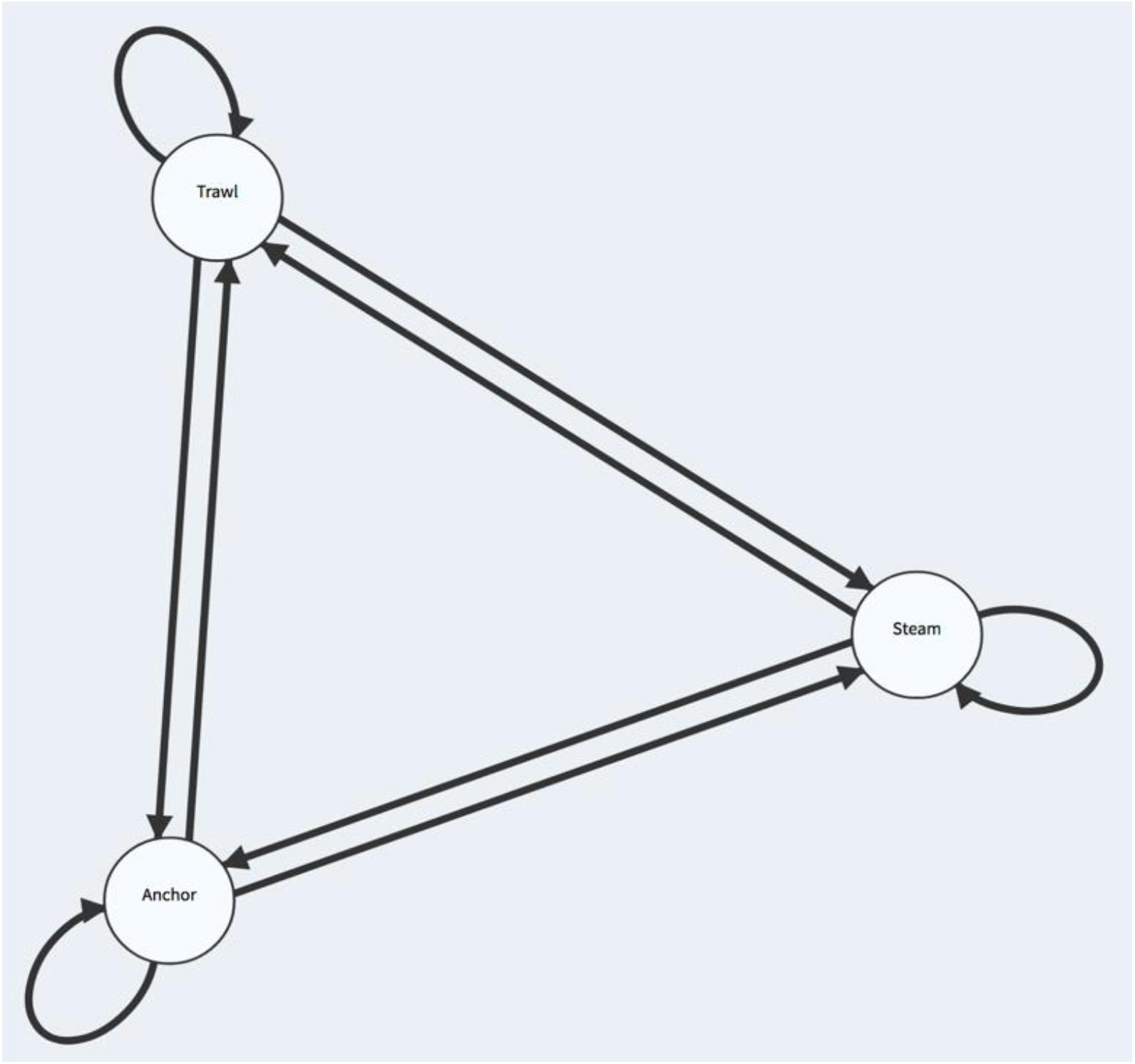
Figure 1. States and potential transitions between states in a hidden Markov model. Arrows represent potential transitions in states between times, which are estimated from the observations.
In brief, an HMM is a statistical model of a system that changes over time between a finite number of states (Figure 2). An HMM relies on the assumption that the system is a Markov process, in which the probability of a future state – here a vessel’s activity, only depends on the state at the previous time. The true state is hidden, as we do not observe it directly in the VMS data, we only observe state-dependent behaviors such as speed. Changes in speed, or more generally other observable characteristics, are then used to estimate the characteristics of the state, i.e., the mean and variance in speed for that state, along with the probabilities of transitioning from one state to another.
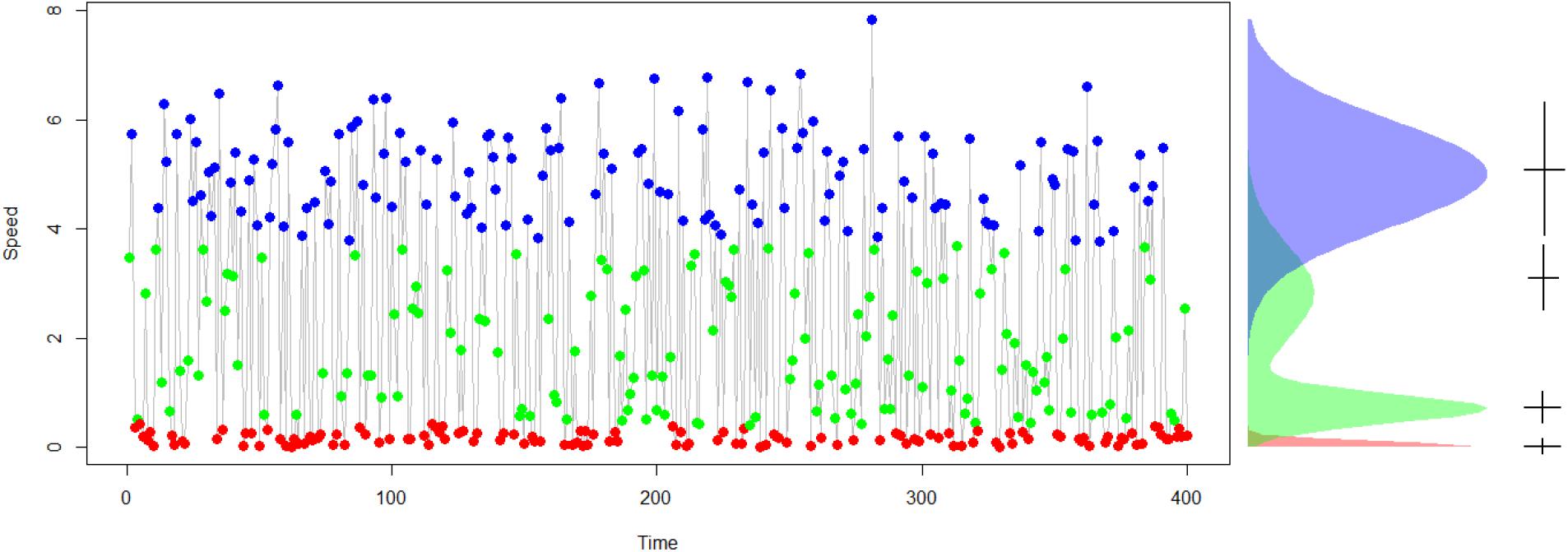
Figure 2. Recovery of vessel behavior states and speed distributions from simulated data using our hidden Markov model. The left panel shows simulated data from the VMS system over time, with variations in vessel speeds driven by the state of the vessel. The colors of the points show the estimated states of the vessel, using an HMM to model the speed distribution and state transitions. The right panel shows the distribution of speeds estimated for each of the three states in the model.
The result is a probabilistic estimate of which state the vessel is in at any time, along with the characteristics of the state and the transition probabilities. HMM approaches have multiple advantages over traditional rules-based methods for estimating vessel behaviors. HMMs account for the temporal correlation in the data, they provide a measure of uncertainty in classification, and can have specified transitions to prevent predictions of unrealistic behaviors such as moving from being in port directly to fishing (Figure 2).
For a more in-depth description of the HMM used in this study, refer to Peel and Good (2011) and Hoenner et al. (2020). This HMM configuration proved highly satisfactory in Hoenner et al. (2020) who were able to validate predictions against fisheries observer data, yielding rates of correct behavior classification >70% across four fisheries and three gear types. Once the model assigned one of those three behavioral states to each VMS position, we then quantified fishing duration in space and time by aggregating fishing events within the same 0.5-degree grid cell.
Results
Data from 1,124 vessels (more than 15 million VMS positions) were analyzed for the period 2012–2019. We removed 42 vessels which had less than 10 VMS positions. For the remaining 1,082 vessels, size ranged from 30 GT to 597 GT, with a median of 70 GT. Throughout the study period, we observed substantial variability in the number of vessels operating within the focal region when evaluated on an annual basis. The number of longline vessels operating in the Indian Ocean rose from roughly 180 in 2012 to over 600 by 2016, remaining high until 2019 when vessel numbers dropped to just under 400. There was a sharp drop in the number of vessels operating in 2015, with a reduction of 26% from 2014 numbers.
Our algorithm identified 223 unique landing sites across the VMS data, 70 of which matched with the MMAF official list of fisheries landing ports (Figure 3). The remaining 153 unique landing sites may be indicative of unofficial landing sites used by the fishing fleet. Many of the potential unofficial landing sites were on the outer islands to the southwest of Sumatra (0°C latitude, 100°C longitude), near the passage between Sumatra and Java (−7°C latitude, 107°C longitude) on the route into the major port at Jakarta, or along the coasts of islands border the Timor and Arafura Seas (Figure 3). Potential unofficial landing sites often occurred near official landing sites that were used, and there was generally no strong spatial separation among the two types of landing sites used by the vessels. Using these landing sites, vessel VMS data was segmented into trips. The mean number of trips across all vessels was 15, with most vessels fairly close to this average (Table 1). Trip duration was typically 3 months (mean = 85 days, median = 61.2 days), while distance traveled per trip averaged 6584.9 km (Table 1).
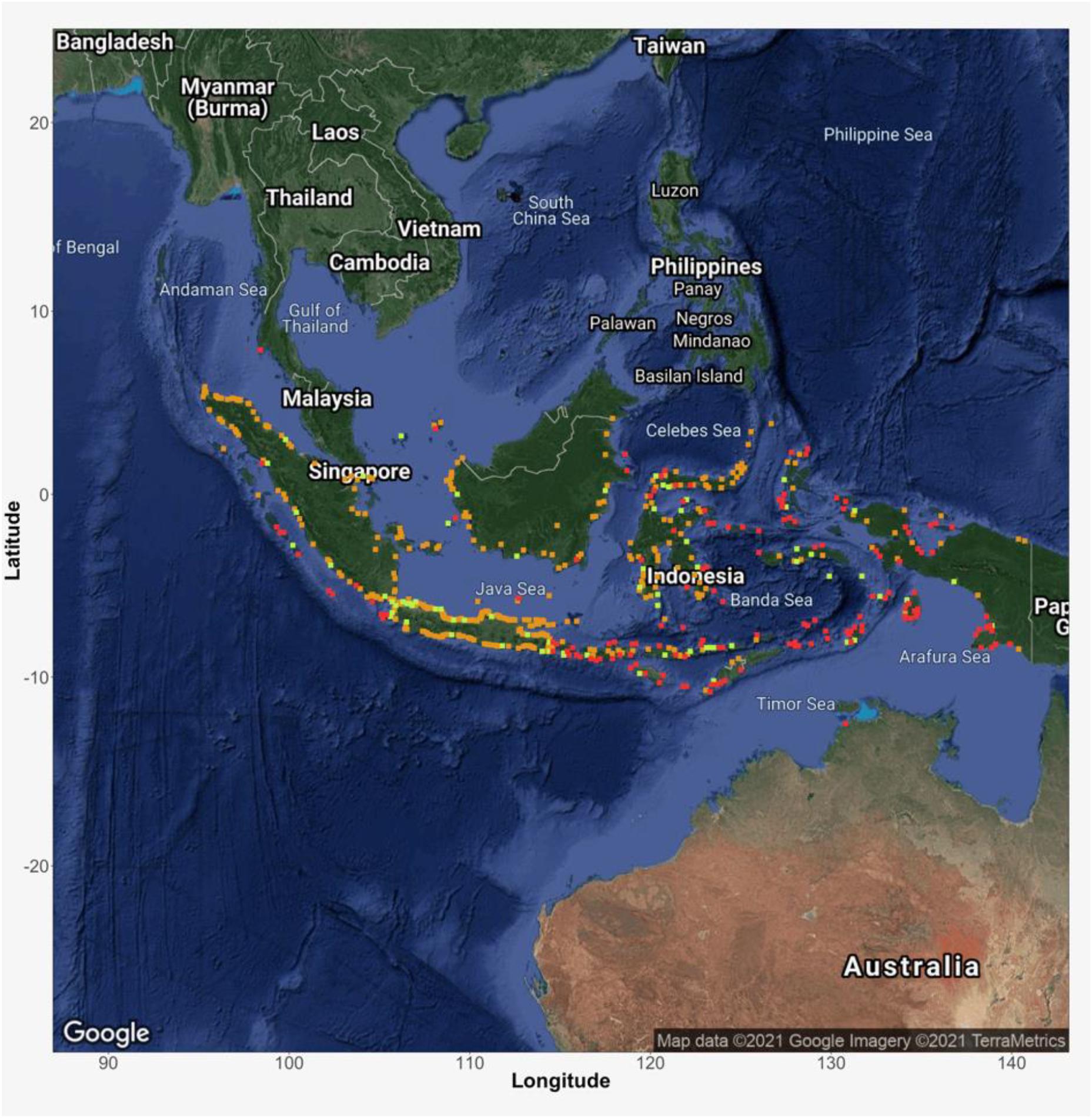
Figure 3. Map of identified ports vs. registered ports. Green squares indicate identified landing sites based on VMS data that match one (or more) officially registered ports; oranges squares indicate landing sites based on VMS data that did not match any officially registered port and red squares indicate registered ports that were not visited by longline fishing vessels.
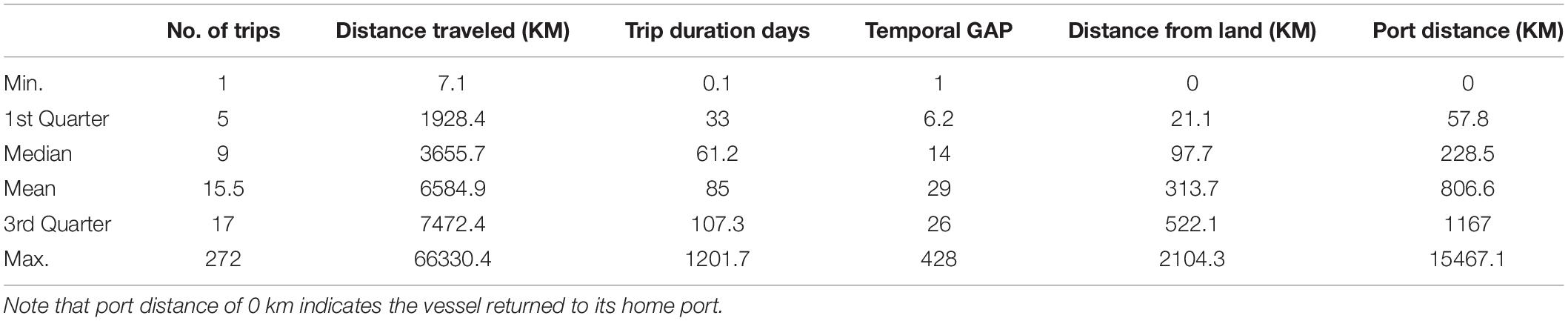
Table 1. Summary of VMS data, including the number of trips in each quarter, the total distance traveled, the trip duration, number of gaps detected, distance from land traveled by the vessel, and the distance the vessel traveled to port.
Gaps in VMS transmissions occurred for 973 of the 1,082 vessels in our dataset, typically occurring far from port and lasting for extended periods of time (mean distance from port = 323.4 km, mean duration = 17.8 h, Table 1). The highest spatial concentration of gaps in transmission took place along the southern margin of the Indonesian archipelago (Figure 3), particularly on the approach to the two major ports in Jakarta (−6°C latitude, 106°C longitude) and Benoa (−8°C latitude, 115°C longitude). However, substantial numbers of interruptions in VMS transmissions also took place offshore, particularly off western Sumatra (Figures 3, 4; −5°C latitude, 95°C longitude) and south of Java (−6°C latitude, 104°C longitude). There is a notable pattern of VMS interruptions along the northwestern boundary of the Australian mainland exclusive economic zone, near the Australian territories of Christmas Island (−10 latitude, 105 longitude) and Cocos (Keeling) Islands (−12°C latitude, 96°C longitude), in Indonesian waters south of the Aru Islands (−6°C latitude, 134°C longitude) and along the joint Papua New Guinea, Indonesia, Australia border (−7°C latitude, 139°C longitude). There were two minor areas of elevated VMS interruptions in the southern portion of the fishing grounds at approximately −30°C latitude, and 85°C and 104°C longitude (Figure 4).
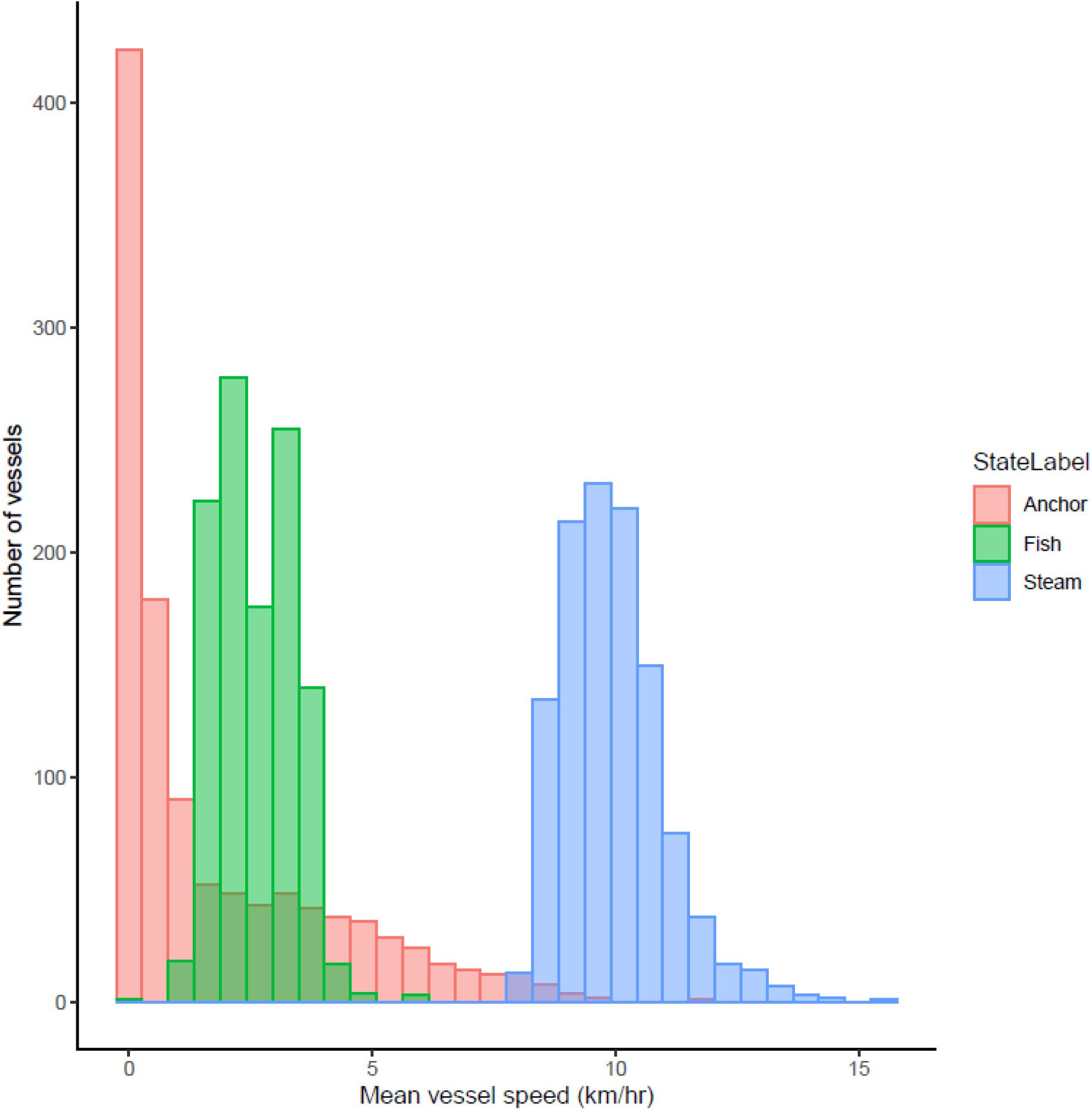
Figure 4. Average speed for each vessel associated with each behavioral state. The speeds are taken from all 1,082 vessels whose behavior was classified, with the average calculated for each vessel across all of its VMS positions.
We found that the best structure for the HMM included three states, fishing, anchoring, and steaming (Figure 5). The best model used only speed and was superior to models bearing or bearing and speed to model vessel behaviors (Figure 5). We found that the best fitting model had a half-Gaussian with a mean of 0.05 km.h–1 for anchoring, a Gaussian with a mean of 4.5 km.h–1 and standard deviation of 1.85 km.h–1 for fishing, and a Gaussian with a mean of 16 km.h–1 and standard deviation of 3 km.h–1 for steaming. The model includes temporal dynamics for transitions among states, and thus there is some overlap among observed speeds as vessels transition from one state to another (Figure 5), compare Anchoring and Steaming. Using the best fitting HMM, we estimated that vessels fish on average 648.1 h, with an average duration for individual fishing events of 4.9 h and an average vessel speed of 2.6 km.h–1 during a fishing trip. Fishing activity typically occurred far offshore (mean distance to land = 549.5 km), at an average distance from port of 1451.1 km.
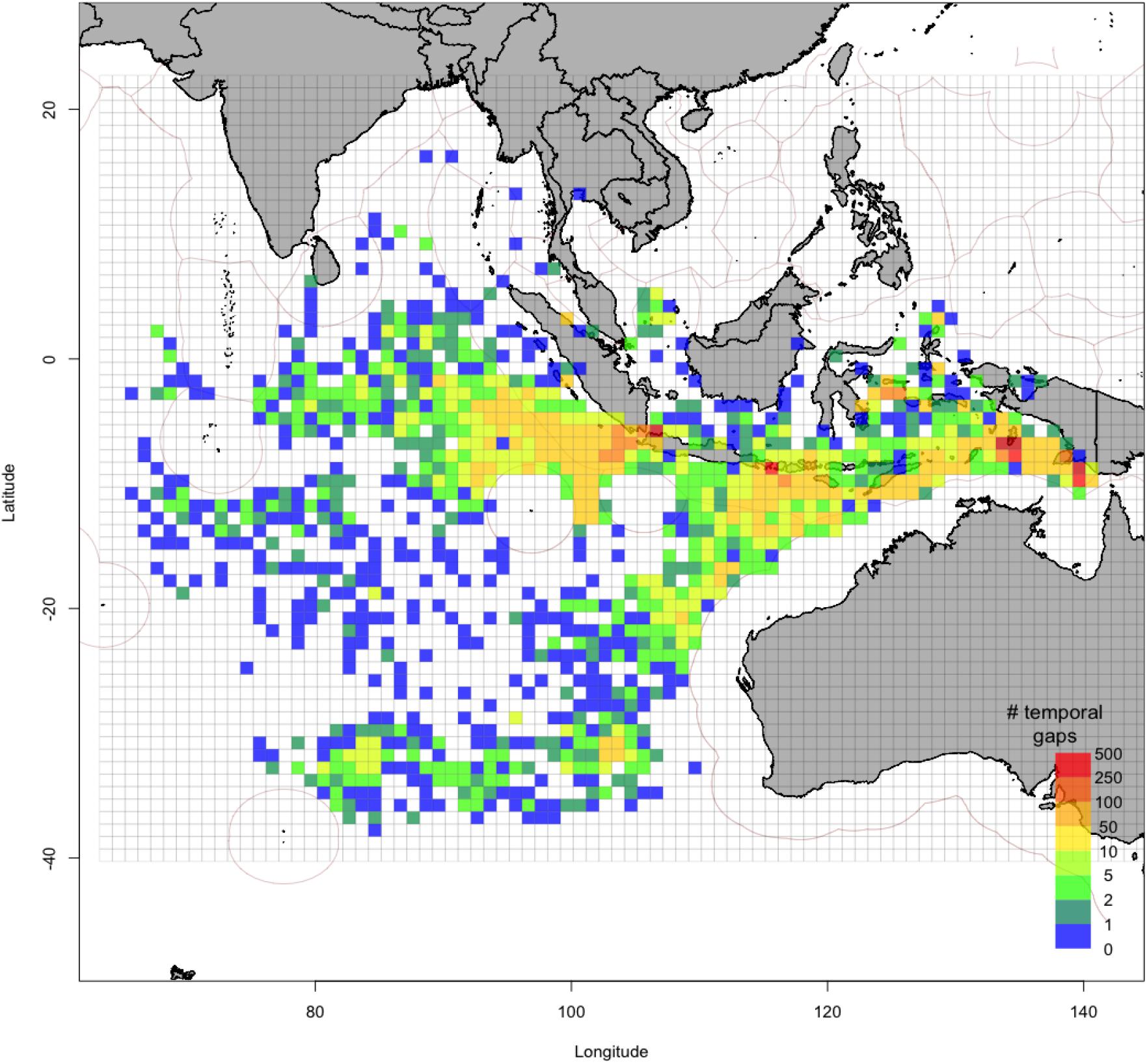
Figure 5. Number of intermissions in VMS transmission per 0.5 degree grid cell across all longline vessels tracked in this study (n = 1,082). Countries’ EEZs boundaries are represented by thin red lines.
Based on the spatial distribution of effort as estimated by the HMM, fishing grounds for the Indonesian tuna longline fishery encompass nearly all of the eastern Indian Ocean. However, the relative distribution varied markedly between years (Figure 6). In 2012–2013, fishing was concentrated in two areas, between 0°C and −10°C latitude and south of −30°C latitude, largely west of 105°C longitude. In 2015, effort contracted back to the northeast, with the main concentration (−20°C latitude, 100°C longitude) just to the southeast of the Australian territory of the Cocos Islands. This contraction continued in 2016 and intensified in 2017 and 2018. By 2017, there was effectively no fishing in the southern portion of the fishing grounds in the Indian Ocean. As the effort in the southern Indian Ocean contracted through 2016, effort expanded eastward into the Timor Sea (−12°C latitude, 120°C longitude). By 2017, fishing effort had increased markedly in this eastern area, spreading all the way to the coast of West Papua, in the Arafura Sea (−10°C latitude, 140°C longitude). In 2019, effort in the southern Indian Ocean appeared to expand again slightly, although it did not reach the intensity of the period before 2015, nor did it reach as far south as it had prior to 2015 (Figure 6).
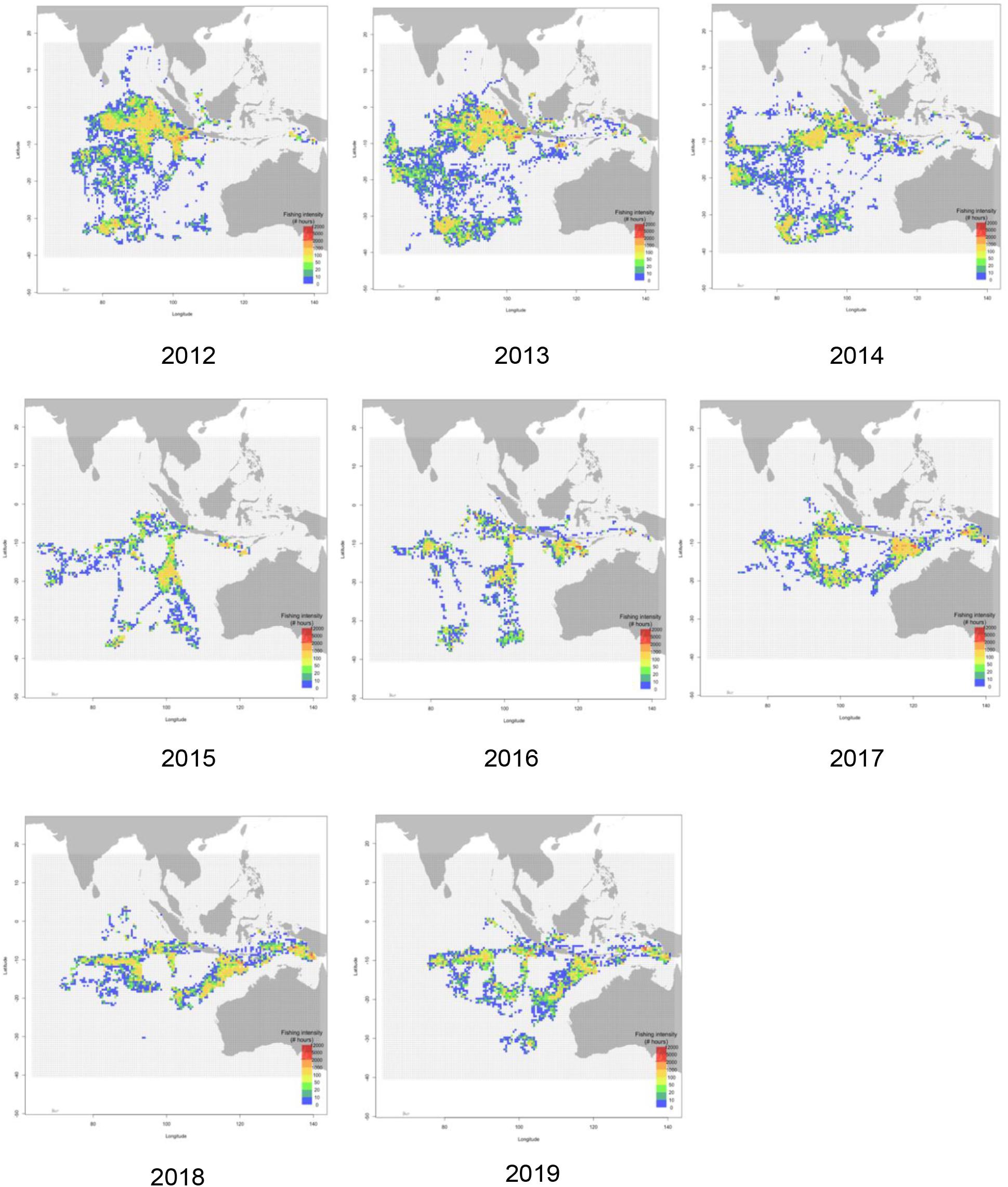
Figure 6. Spatio-temporal distribution of fishing events from 2012 through 2019, represented as the total fishing duration (hours) per 0.5 × 0.5° grid cell.
Discussion
We found major shifts in the distribution of the Indonesian longline fleet between 2012 and 2019, with the southern Indian Ocean portion of the operations collapsing back toward the Indonesian domestic waters and an expansion eastward toward the border with Papua New Guinea. Using a time-series model tuned individually for each of the 1,082 vessels in the fleet, we were able to construct their individual fishing patterns by separating their activity types over the course of each fishing trip. The workflow we developed, which requires identifying landing sites in order to segment VMS data into individual trips, and flag abnormal gaps in VMS transmission, to identify low quality data, also serves to flag compliance issues. Both of these behaviors, landing at an unauthorized port and not transmitting hourly VMS positions, are prohibited by Indonesian fisheries regulations.
High accuracy in identifying the behavior of fishing vessels is a critical step to estimate fishing vessel activity and effort (Gloaguen et al., 2015). Various methods have been used to estimate fishing vessel behavior using VMS data, including simple speed rules, statistical clustering routines, and time series models like the HMM we used. In Indonesia to date, the fisheries ministry has primarily used a speed rule in their VMS software to identify fishing vessel behaviors (MMAF, 2019). In the Indonesian case, all vessels moving at 0 km.h–1 are considered to be anchored, those with a speed over ground between 0 and 5.55 km.h–1 are considered to be fishing, and those moving faster than 9.26 km.h–1 are considered to be transiting. Speeds between fishing and transiting are not classified (MMAF, 2019). Typically, these sorts of speed rules for fishing behavior have been validated by comparison to fishing logbook records, with the identification of fishing grounds being based on fisheries logbook or observer information (Jennings and Lee, 2012). However, in the Indonesian case, defining fishing behavior based on logbook data is not possible due to pervasive problems with coverage, accuracy, and standardization. Similarly, fisheries observer coverage is very low, with declines in coverage and quality since 2012 (Marza, 2017).
While a simple speed rule is easy to apply as a behavior classification approach to separate anchoring, transiting, and fishing, the approach suffers from a number of problems. Generally, it is not derived by estimation from observation data, and thus has no fundamental link to the underlying process. This lack of estimation means that differences across time or among vessels are generally not accounted for, nor is the uncertainty in classification included in the estimates. The more statistically oriented approaches, such as statistical clustering techniques and time series approaches can address these issues, creating data-driven models that provide classifications of behaviors across VMS polls, and including uncertainty around the classification estimates. Marza (2017) explored the use of statistical clustering approaches, which treat each VMS poll independently, for classifying vessel behaviors (anchoring, steaming, fishing) and fishing gear types. The research evaluated a simple rule-based classification against a Support Vector Machine (SVM) model, a Random Forest model (RF), and a Gaussian Mixture Model (GMM). Marza (2017) demonstrated that the GMM was the most accurate method, with an estimated accuracy of 82% at identifying fishing events. For longline vessels, the research estimated that fishing activities (such as setting and hauling gear) occurs at speeds between 3.7 and 11 km.h–1, with steaming at more than 11 km.h–1, and anchoring at less than 3.7 km.h–1.
The approach we use extends that of Marza (2017) in several ways. The HMM we used is similar to a Gaussian mixture model in that it uses a combination of distributions to model vessel behavioral states. However, it has several key differences. First, it considers the connection of behavioral states between time periods. Thus, if a vessel is steaming when the VMS polls, there is some probability that it is still steaming at the next poll, and a probability of moving to each of the other possible states. This consideration of the time series of states allows for the possibility that transitions between some states are not possible. For instance, it might not be possible to go from anchoring to fishing without an intermediary state. An HMM also allows for a typical residence time in a state, driven by the probability of moving out of that state. Thus, in contrast to Marza (2017) we find overlap between speeds in Anchoring and Fishing, which result from the temporal dependence between states over time, as opposed to being able to switch among behavior types independently at each individual time point. This feature of the model reduces issues such as false fishing events near ports when vessels are moving slowly.
The shift in effort north-eastward across the fishing grounds that we observed is very likely linked to regulatory changes that came into the fishery between 2014 and 2015. Two key regulations were released by the fisheries ministry, a ban on foreign-made fishing vessels operating in Indonesian waters, and a prohibition on transshipment at sea in Indonesia’s EEZ. Transshipment is common in the Indonesian longline fleet (estimated at 62% of vessels), with vessels moving their catches to fish carrier vessels, or to other fishing vessels heading to port (Purnama et al., 2016; Satria et al., 2018). The characteristics of most Indonesian longline vessels, which generally lack modern refrigeration, mean that transshipment is often the best option to maintain the quality of fish. Offloading catch to carrier vessels is a fundamental part of the operational model that allows these relatively basic wooden vessels to remain at sea for 3 months and travel more than 6,000 km to the southern Indian Ocean. The prohibition on transshipment likely made much of the southern Indian Ocean fishing ground economically unviable, as longline vessels would have been forced to carry their own catches back to port using onboard chilling with an ice-brine slurry. The inability to offload catch would have shorted trip lengths significantly, and increased the ratio of steaming to fishing activity, raising the cost of production substantially. The effort contraction observed in 2015 was likely compounded by the ban on foreign built vessels. Subsequently, ship owners may have shifted their fishing area licenses from the Indian Ocean to eastern Indonesia as fishing grounds in eastern Indonesia are closer to fishing ports and the transshipment ban does not apply to these waters. Finally, shipowners may have changed gear to squid jigging as the latter is considered more profitable than longline when fishing grounds are close to port and trips are of short duration. This explanation is corroborated by port records documenting a sharp rise in longline and squid jigging vessels operating out of Dobo fishing port in the region of the Arafura Sea where effort shifted (Saleh and Sutanti, 2020).
We found gaps in VMS transmissions for 90% of the vessels in our dataset. This is an increase over official compliance records, which report that 42% of ships received a warning for not transmitting VMS (DFMO, 2020). Chapsos and Hamilton (2018) noted that gaps in VMS transmissions by vessels in Indonesia is likely linked to intentional disabling by vessel operators to avoid monitoring during non-compliant activities. The main non-compliance activity likely occurring during temporal gaps is transshipment, the majority of which takes place at sea (Chapsos and Hamilton, 2018). The spatial pattern of gaps in transmissions we found is indicative of this pattern, with gaps particularly common for vessels in the two fishing locations in the southern Indian Ocean. The frequency of gaps was also high just to the west of the Indonesian archipelago, on the boundary of an area of consistently high fishing effort. The average gap length was 18 h, on a VMS system that reports hourly – suggesting that the issue was not a minor malfunction that was fixed quickly, nor an equipment failure that required a return to port. Together, the frequency, positions, and length of these gaps supports the suggestion that vessels continued to tranship after it was banned, but avoided monitoring of rendezvous by having one or both vessels disable their transponders.
There also appears to be a strong pattern of VMS gaps along the EEZ boundaries of neighboring countries, including mainland Australia, Australia’s offshore territories, Timor Leste, and Papua New Guinea. These gaps may be linked to fishing activity near borders, and potentially incursions across borders – particularly in the later years of the dataset as effort contracted back from their southern and northwestern Indian Ocean fishing grounds. We found concentrations of fishing effort along these borders after 2017, with fishing positions crossing into some areas historically linked to illegal fishing such as the “dogleg,” at the Australia – Papua New Guinea – Indonesia border. Historically, incursions by Indonesian vessels into Australian waters have been an issue. However, based on recent surveillance data the issue has declined since its peak in 2006 and is very low in the later years of our study (Vince et al., 2020). Vessels that are not transmitting VMS may still be entering Papua New Guinea in particular though, given fishing events we estimated from VMS transmissions near or inside PNG waters.
Finally, the high concentration of gaps near the two largest official ports may be indicative of use of unauthorized landing sites, prior to entry into the main ports. Fishing port authorities play a critical role as they register vessel port entry and exit, monitor catch, and provide clearance to sail. The presence of very high levels of VMS gaps on the approach to the two main ports (Jakarta and Benoa) from the main fishing grounds to the south, along with the presence of unauthorized landing sites in these two locations, could indicate landing of undocumented catch (DFMO, 2020), smuggling, or human trafficking (Chapsos and Hamilton, 2018). Similarly, there is a concentration of unauthorized landing sites on Aru Island, and in the southeastern coast of West Papua. Historically these areas have had significant issues with illegal fishing, particularly from foreign or joint venture vessels prior to the moratorium on foreign built vessels (FWU, pers. obs.). The coincidence of very high levels of VMS gaps and relatively large numbers of potential unauthorized landing sites should be taken as a potential indication of illegal activity (DFMO, 2020). A recent study of illegal fishing across the region highlights this area as having ongoing illegal fishing issues (Wilcox et al., 2021).
Indonesian vessels over 30 GT have a set list of specific ports they may enter based on their license, typically three locations, unless exceptional circumstances arise such as a storm, a medical emergency or technical failures (Witbooi, 2014). We found 153 potential landing sites based on the VMS data from long liners that were not on the list of official ports throughout Indonesia. While it is possible that many of these sites are locations where vessels shelter from weather, and thus might not raise compliance issues, their frequency and proximity to other fisheries infrastructure suggests that they could be a compliance issue worth monitoring (DFMO, 2020).
Our results provide useful information on the shifts in effort and potential compliance issues that has direct value for management and compliance activities. The transshipment ban appears to have driven a major shift in fishing effort, and may have led some vessels to transition out of the longline fleet. We found significant compliance issues that could be used to target enforcement activities, as VMS disabling and unauthorized landings are non-compliant in and of themselves. These patterns may also point to larger issues, such as offloading of unrecorded catch, labor and human trafficking, or smuggling. A transition to real time processing of VMS data using the workflow developed here is possible, offering the potential for the fisheries management agency to respond immediately to known compliance issues such as fishing outside permitted areas or in foreign waters, disabling of VMS, or unauthorized landings. Moreover, linking VMS based estimates of effort with reported landings could be used to forecast expected landings, providing field officers with information on catch volumes and compositions they should expect when inspecting vessels at landing. This information could increase the effectiveness of compliance officers, as it would make it easier for them to detect irregularities in fishing practices based on expected landings at inspection.
Conclusion
We developed a timeseries model for inferring fishing effort from individual vessel VMS patterns, building on past approaches that used either simple speed rules, or statistical clustering techniques that ignored time dynamics. This model is embedded in a supporting workflow that segments VMS data and identifies landing sites and gaps in VMS transmissions. This set of tools can be implemented in a VMS system, simplifying estimation of effort distributions and automating detection of important compliance issues. Moreover, it provides the foundation for delivering real-time intelligence to field inspectors, improving their efficiency in detecting non-compliant behaviors.
Applying this tool to the Indonesian longline fleet, we found a major shift in the distribution of effort over a 7 year period. This shift appears to be largely driven by the economic implications of the regulatory ban on transshipment in the tuna longline sector. These economic implications appear to be exacerbating compliance issues, with evidence of illicit transshipment and unauthorized landings occurring at scale throughout the fishery. Moreover, the shift in effort to the Arafura Sea on the eastern boundary of Indonesia’s waters is likely exacerbating border incursions into Papua New Guinea and Timor Leste waters.
Data Availability Statement
The datasets presented in this article are not readily available because available only upon request and if appropriate, given Indonesia government requirements/restrictions around data provisioning. Requests to access the datasets should be directed to FU, aXBlYjM4QGdtYWlsLmNvbQ==.
Author Contributions
CW, FU, XH, and JF designed the research. FU, XH, CW, and JF conducted the analysis. All authors contributed to writing and editing the manuscript.
Funding
This work was supported by the Department of Foreign Affairs and Trade (DFAT) for the project between CSIRO and MMAF “Enabling Enforcement through Improved Use of Monitoring Information to Support Surveillance Activities.” We also thank the Directorate General of Marine and Fisheries Resources Surveillance (PSDKP) for providing data for this work. This work was also supported by CSIRO Oceans and Atmosphere.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Badan Perencanaan Pembangunan Nasional (2014). Kajian Strategi Pengelolaan Perikanan Berkelanjutan. Jakarta: Bappenas.
Bez, N., Walker, E., Gaertner, D., Rivoirard, J., Gaspar, P., and Walters, C. (2011). Fishing activity of tuna purse seiners estimated from vessel monitoring system (VMS) data. Can. J. Fish. Aquat. Sci. 68, 1998–2010. doi: 10.1139/f2011-114
Chapsos, I., and Hamilton, S. (2018). Illegal fishing and fisheries crime as a transnational organized crime in Indonesia. Trends Organ. Crime 22, 255–273. doi: 10.1007/s12117-018-9329-8
Charles, C., Gillis, D., and Wade, E. (2014). Using hidden Markov models to infer vessel activities in the snow crab (Chionoecetes opilio) fixed gear fishery and their application to catch standardization. Can. J. Fish. Aquat. Sci. 71, 1817–1829. doi: 10.1139/cjfas-2013-0572
Delgado, C. L., Wada, N., Rosegrant, M. W., Meijer, S., and Ahmed, M. (2003). Fish to 2020: Supply and Demand in Changing Global Markets. Washington, DC: IFPRI.
DFMO (2020). Annual report of Fishing Monitoring Center 2019. Jakarta, Ministry of Marine Affairs and Fisheries.
Fahmi, Z., Setyadji, B., and Yunanda, T. (2019). Indonesia National Report to the Scientific Committee of the Indian Ocean Tuna Commission, 2019. Victoria: The Indian Ocean Tuna Commission, 25.
FAO (2020). The State of World Fisheries and Aquaculture 2020 – Sustainability in Action. Rome: Food and Agriculture Organization of the United Nations, 224.
Gerritsen, H., and Lordan, C. (2011). Integrating vessel monitoring systems (VMS) data with daily catch data from logbooks to explore the spatial distribution of catch and effort at high resolution. ICES J. Mar. Sci. 68, 245–252. doi: 10.1093/icesjms/fsq137
Gloaguen, P., Mahévas, S., Rivot, E., Woillez, M., Guitton, J., Vermard, Y., et al. (2015). An autoregressive model to describe fishing vessel movement and activity. Environmetrics 26, 17–28. doi: 10.1002/env.2319
Hintzen, N. T., Bastardie, F., Beare, D., Piet, G. J., Ulrich, C., Deporte, N., et al. (2012). VMStools: open-source software for the processing, analysis and visualisation of fisheries logbook and VMS data. Fish. Res. 115-116, 31–43. doi: 10.1016/j.fishres.2011.11.007
Hoenner, X., Hardesty, B. D., Peel, D., Ford, J. H., and Wilcox, C. (2020). Spatio-Temporal Patterns of Fishing Activity for Three Commonwealth Fisheries in Relation to Australian Marine Parks. Hobart, Tas: CSIRO.
Jennings, S., and Lee, J. (2012). Defining fishing grounds with vessel monitoring system data. ICES J. Mar. Sci. 69, 51–63. doi: 10.1093/icesjms/fsr173
Joo, R., Bertrand, S., Tam, J., and Fablet, R. (2013). Hidden Markov models: the best models for forager movements? PLoS One 8:e71246. doi: 10.1371/journal.pone.0071246
Joo, R., Salcedo, O., Gutierrez, M., Fablet, R., and Bertrand, S. (2015). Defining fishing spatial strategies from VMS data: insights from the world’s largest monospecific fishery. Fish. Res. 164, 223–230. doi: 10.1016/j.fishres.2014.12.004
Lambert, G. I., Jennings, S., Hiddink, J. G., Hintzen, N. T., Hinz, H., Kaiser, M. J., et al. (2012). Implications of using alternative methods of vessel monitoring system (VMS) data analysis to describe fishing activities and impacts. ICES J. Mar. Sci. 69, 682–693. doi: 10.1093/icesjms/fss018
Marza, I. M. (2017). VMS Data Analyses and Modeling for the Monitoring and Surveillance of Indonesian Fisheries. Computer Vision and Pattern Recognition [cs.CV]. Ecole Nationale Supérieure Mines-Télécom Atlantique, 2017. English. ffNNT: 2017IMTA0012ff. fftel-01801769. Paris: Ecole nationale supérieure Mines.
Melnychuk, M. C., Peterson, E., Elliott, M., and Hilborn, R. (2017). Fisheries management impacts on target species status. Proc. Natl. Acad. Sci. U.S.A. 114, 178–183. doi: 10.1073/pnas.1609915114
Mertha, I. G. S., Nurhuda, M., and Nasrullah, A. (2017). Perkembangan perikanan tuna di Pelabuhanratu. J. Penelitian Perikanan Indonesia 12, 117–127. doi: 10.15578/jppi.12.2.2006.117-127
Mora, C., Myers, R. A., Coll, M., Libralato, S., Pitcher, T. J., Sumaila, R. U., et al. (2009). Management effectiveness of the world’s marine fisheries. PLoS Biol. 7:e1000131. doi: 10.1371/journal.pbio.1000131
Pauly, D., and Zeller, D. (2016). Catch reconstructions reveal that global marine fisheries catches are higher than reported and declining. Nat. Commun. 7:10244. doi: 10.1038/ncomms10244
Peel, D., and Good, N. M. (2011). A hidden Markov model approach for determining vessel activity from vessel monitoring system data. Can. J. Fish. Aquat. Sci. 68, 1252–1264. doi: 10.1139/f2011-055
Pramoda, R., and Putri, H. M. (2018). Ecolabelling perikanan- sertifikasi Marine Stewardship Council (MSC) untuk produk tuna (studi kasus- Bali). J. Kebijakan Sosial Ekon. Kelautan Perikanan 7, 159–177. doi: 10.15578/jksekp.v7i2.6098
Proctor, C., Merta, I., Sondita, M., Wahju, R., Davis, T., Gunn, J., et al. (2003). A Review of Indonesia’s Indian Ocean Tuna Fisheries. ACIAR Country Status Report. Hobart, Tas: CSIRO Marine Research.
Purnama, R. H., Diniah, D., and Wahju, R. I. (2016). Transshipment activites estimation in tuna longliner base on VMS Data and catch composition. Mar. Fish. 7, 179–189. doi: 10.29244/jmf.7.2.179-189
Rijnsdorp, A. D., Peck, M. A., Engelhard, G. H., Mollmann, C., and Pinnegar, J. K. (2009). Resolving the effect of climate change on fish populations. ICES J. Mar. Sci. 66, 1570–1583. doi: 10.1093/icesjms/fsp056
Russo, T., Carpentieri, P., Fiorentino, F., Arneri, E., Scardi, M., Cioffi, A., et al. (2016). Modeling landings profiles of fishing vessels: an application of Self-Organizing Maps to VMS and logbook data. Fish. Res. 181, 34–47. doi: 10.1016/j.fishres.2016.04.005
Saleh, R., and Sutanti, A. (2020). “Study of fishing vessels and fish caught in the fishing port of Dobo, Aru Islands, Maluku Province,” in Proceedings of the 3rd International Conference on Applied Marine Science and Fisheries Technology 10–12 October 2019, Southeast Maluku, Indonesia: IOP Conference Series: Earth and Environmental Science, Vol. 517(Southeast Maluku),Google Scholar
Satria, F., Sadiyah, L., Widodo, A. A., Wilcox, C., Ford, J. H., and Hardesty, B. D. (2018). Characterizing transshipment at-sea activities by longline and purse seine fisheries in response to recent policy changes in Indonesia. Mar. Policy 95, 8–13. doi: 10.1016/j.marpol.2018.06.010
Yuniarta, S., van Zwieten, P. A. M., Groeneveld, R. A., Wisudo, S. H., and van Ierland, E. C. (2017). Uncertainty in catch and effort data of small- and medium-scale tuna fisheries in Indonesia: sources, operational causes and magnitude. Fish. Res. 193, 173–183. doi: 10.1016/j.fishres.2017.04.009
Sunoko, R., and Huang, H.-W. (2014). Indonesia tuna fisheries development and future strategy. Mar. Policy 43, 174–183. doi: 10.1016/j.marpol.2013.05.011
Vermard, Y., Rivot, E., Mahévas, S., Marchal, P., and Gascuel, D. (2010). Identifying fishing trip behaviour and estimating fishing effort from VMS data using Bayesian Hidden Markov Models. Ecol. Model. 221, 1757–1769. doi: 10.1016/j.ecolmodel.2010.04.005
Vince, J., Hardesty, B. D., and Wilcox, C. (2020). Progress and challenges in eliminating Illegal, unreported and unregulated (IUU) fishing in Australian waters. Fish Fish. 22, 518–531. doi: 10.1111/faf.12532
Walker, E., and Bez, N. (2010). A pioneer validation of a state-space model of vessel trajectories (VMS) with observers’ data. Ecol. Model. 221, 2008–2017. doi: 10.1016/j.ecolmodel.2010.05.007
Wilcox, C., Mann, V., Cannard, T., Ford, J., Hoshino, E., and Pascoe, S. (2021). A Review of Illegal, Unreported and Unregulated Fishing Issues and Progress in the Asia-Pacific Fishery Commission Region. Bangkok: FAO, doi: 10.4060/cb2640en
Witbooi, E. (2014). Illegal, unreported and unregulated fishing on the high seas: the port state measures agreement in context. Int. J. Mar. Coast. Law 29, 290–320. doi: 10.1163/15718085-12341314
Witt, M. J., and Godley, B. J. (2007). A step towards seascape scale conservation: using vessel monitoring systems (VMS) to map fishing activity. PLoS One 2:e1111. doi: 10.1371/journal.pone.0001111
Keywords: fishing effort, hidden Markov model, longline, vessel monitoring system, vessel compliance, VMS, IUU, spatial management
Citation: Utama FW, Hoenner X, Hardesty BD, Peel D, Ford JH, Adams V and Wilcox C (2021) Estimating Fishing Effort and Spatio-Temporal Distribution of Longline Vessels in the Indian Ocean. Front. Mar. Sci. 8:671036. doi: 10.3389/fmars.2021.671036
Received: 22 February 2021; Accepted: 28 July 2021;
Published: 26 August 2021.
Edited by:
Simone Libralato, Istituto Nazionale di Oceanografia e di Geofisica Sperimentale, ItalyReviewed by:
Tommaso Russo, Tor Vergata University of Rome, ItalyFrancois Bastardie, Technical University of Denmark, Denmark
Copyright © 2021 Utama, Hoenner, Hardesty, Peel, Ford, Adams and Wilcox. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Chris Wilcox, Y2hyaXMud2lsY294QGNzaXJvLmF1