 Zhongqiu Wang
Zhongqiu Wang Hao Tang
Hao Tang Bent Herrmann
Bent Herrmann Liuxiong Xu1,2,3,4,5
Liuxiong Xu1,2,3,4,5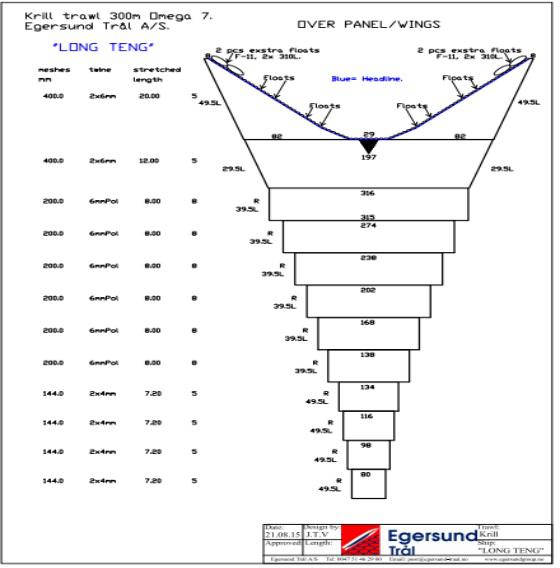{kind=link}
{kind=link}

94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Mar. Sci., 28 September 2021
Sec. Marine Fisheries, Aquaculture and Living Resources
Volume 8 - 2021 | https://doi.org/10.3389/fmars.2021.670663
Antarctic krill (Euphausia superba) is harvested using different design midwater trawls. Knowing the selective properties between trawls is crucial information for the management of the krill resources. This study compared the catch patterns between different commercial krill trawls at similar times and overlapping fishing grounds based on scientific data collected by scientific observers onboard commercial trawlers Long Teng (LT) and Fu Rong Hai (FRH). The results showed significant differences in the length-dependent catch densities and cumulative catch densities of krill between the two trawls. The krill length range in catches from LT's trawl was wider than that of FRH's trawl. Furthermore, the catch would consist of a larger proportion of smaller krill in the LT's trawl. The LT's trawl caught significantly higher proportions of krill below 38 mm than FRH's trawl. Even, the LT's trawl caught substantial numbers of krill <30 mm, whereas the FRH's trawl caught very few of them. The main factors causing the difference between trawls in catch pattern were inferred to be related to gear design including differences in mesh sizes used. The results of this study enhance the quality of comparative analysis of scientific data from commercial trawls and the understanding of gear selectivity of different configuration trawls used for harvesting krill.
Since 1993, the krill trawl fishery has concentrated on subareas 48.1, 48.2, and 48.3 of FAO area 48, west of the South Atlantic (CCAMLR, 2020a). Given the evolution of krill resources and fishing grounds, the traditional mode of large-scale scientific investigations, which has been practiced for decades, has not yet adapted to the changes in krill resources and the updated requirements for fishery management (Zhu et al., 2013). The scientific survey of fisheries is an important supplement to large-scale scientific investigations and assessments of krill resources.
Commercial trawlers can operate throughout most of the year and sample krill almost daily (Kawaguchi and Nicol, 2007). The Commission for the Conservation of Antarctic Marine Living Resources (CCAMLR) has collected commercial fishery data from the International Scientific Observer Program since its establishment (Godø et al., 2014). Those scientific data collected by scientific observers onboard commercial trawlers provide important information for the management of krill resources and the ecosystem of the Antarctic Ocean (Okuda and Kiyota, 2012). One such information is the length composition of krill in catches used to better understand the population structure of krill resources, assess fishing gear selectivity, and formulate feedback management (FBM) indicators. It is also integral information for the acoustic study of krill distribution based on acoustic measurements onboard commercial trawlers (CCAMLR, 2011; Kasatkina, 2017). However, commercial trawlers involved in krill fishery use different trawl designs, such as trawl structure, net dimensions, mesh sizes, and operations (towing speed, etc.) that affect the selectivity of trawls and result in sampling bias between different trawls (Zimarev et al., 1990; Kasatkina, 1997). Therefore, differences exist in the length composition of krill in the catches of different commercial krill trawls. The selectivity properties of trawls need to be considered to analyze the krill length data collected from commercial fisheries, including a comparison of the length composition of krill from different trawls (Kasatkina, 1997).
Czubek (1981) reported that krill could escape through a larger mesh (90 mm) in front of the trawl body and a smaller liner netting mesh (12 mm) of both trawl body and codend. Furthermore, the escape rate of krill differs for different parts of the trawl with the same mesh size. Additionally, Norwegian scholars used the parallel trawl method (Krag et al., 2014), the cover net method (Herrmann et al., 2018), and the “selection cage” method (where the netting in front is covered with several frame devices) (Krag et al., 2018) to study the selectivity of a single mesh size (2a:15.4 mm) for the whole trawl, codend, and netting, indicating that the 50% selection lengths were 32.72, 26.04, and 31.64 mm, respectively. However, traditional sea trials (e.g., parallel trawling methods and cover net methods) are time-consuming and expensive. Furthermore, a limited number of different gear designs can be tested. Additionally, several commercial trawlers use a continuous pumping technique to move catches from the trawl to the deck, which further complicates standard selectivity studies (Krag et al., 2014). Due to the fact that commercial krill trawlers often operate at similar times and overlapping fishing grounds. Furthermore, Ricketts et al. (1992) reported that no significant differences in biology (length, maturity, sex ratio, and developmental stage) have been found for different krill swarms on a small scale. Therefore, it is possible to quantify and analyze the catch pattern of different commercial trawls depending on the length composition of krill caught during the cruises between the different trawls by matched hauls at similar times and overlapping fishing grounds.
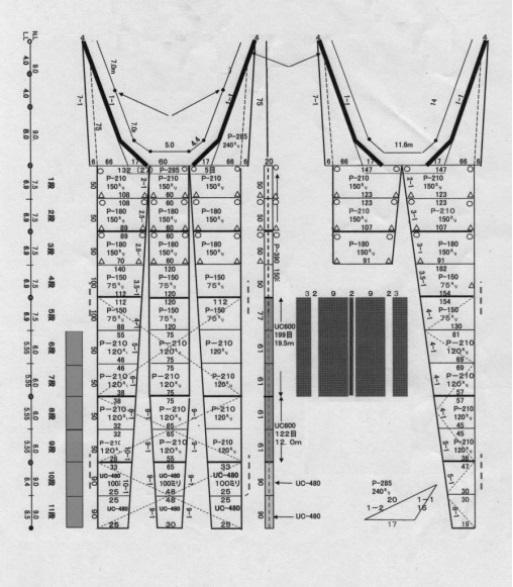
Currently, commercial krill trawls are usually of low tapered constructions, with small-mesh liners (10–50 mm of mesh size) fitted in the trawl body and codend to reduce catch loss through meshes (Krag et al., 2018). There are two main types of liner assembly for commercial krill trawls. Some trawl-fitted liners usually cover almost the whole length of the trawling body. For example, Pelagic otter trawl is used by Chinese trawler “Longteng,” which is fitted with a 16-mm mesh size liner starting from the second section of the trawl body and an 11-mm mesh size liner in the codend (CCAMLR, 2020b). Other trawl-fitted liners are usually half of the length of the trawl body. For example, Pelagic otter trawl used by Chinese trawler “Furonghai,” which is fitted with liners starting from the sixth section and taking gradually decreasing mesh size of liners that from 30 mm (6th−7th) to 25 mm (8th−9th), then to 20 mm (10th−11th sections) of the trawl body, and to 15-mm mesh size in the codend (CCAMLR, 2020c). These different arrangements and mesh sizes of liners may result in different fishing performances with regard to escaping of krill through meshes of trawl, and retention in the codend.
The aim of the present study was to investigate the catch patterns and to compare size frequency distribution and cumulative size frequency distribution of krill caught by the matched hauls based on scientific data of the two trawls from commercial trawlers “Long Teng” (LT) and “Fu Rong Hai” (FRH) at similar times and overlapping fishing grounds. Subsequently, this study analyzes the length-dependent catch comparison and catch ratio to determine whether there was a difference in catch and/or krill length between the two trawls onboard LT and FRH. The results of this study contribute to understanding the differences in selectivity properties and catch efficiency of different configuration trawls.
The data were obtained from the midwater otter trawls, which were used by trawlers LT and FRH. The midwater trawl of the trawler LT was a four-panel krill trawl with a net dimension of 300 × 132.8 m. The wing dimension was 20 m in length, and the mesh size was 400 mm. The trawl body dimension was 88.8 m in length, divided into 11 sections with mesh sizes of 400, 200, and 144 mm on the first, 2nd−7th, and 8th−11th sections, respectively. The liner netting, with a mesh size of 16 mm, was equipped from the second section. The codend dimension was 24 m in length, and the mesh size was 144 mm and equipped liner netting with a mesh size of 11 mm. The trawler FRH used a midwater trawl consisting of 10-panel krill trawls with net dimensions of 185.4 × 128.5 m. The wing of the trawl net was 18 m in length and had a mesh size of 240 mm. The trawl body dimension was 79.5 m in length, divided into 11 sections with mesh sizes of 150, 75, 120, and 100 mm on the 1st−3rd, 4th−5th, 6th−9th, and 10th−11th sections, respectively. The segmented gradient mesh sizes of liner nettings were 30, 25, and 20 mm on the 6th−7th, 8th−9th, and 10th−11th sections, respectively. The codend had a length of 31 m with a mesh size of 100 mm and equipped liner netting with a mesh size of 15 mm (Table 1).

Table 1. Information on the trawls of trawlers Long Teng (LT) and Fu Rong Hai (FRH).
Based on the Scheme of International Scientific Observation Scientific Observer's Manual Krill Fisheries. The length data of 200 sampled krill from each observed haul were measured by CCAMLR scientific observers onboard the trawler LT and FRH over the 2017/2018 fishing season. The krill length frequency divided by 2 mm and the median length of the group was used as the characteristic length. They were divided into groups 21 (<22), 23 (22–24), 25 (24–26), 27 (26–28), 29 (28–30), 31 (30–32), 33 (32–34), 35 (34–36), 37 (36–38), 39 (38–40), 41 (40–42), 43 (42–44), 45 (44–46), 47 (46–48), 49 (48–50), 51 (50–52), 53 (52–54), 55 (54–56), 57 (56–58), 59 (58–60), and 60 (≥60) mm, respectively.
Data, such as operating time, latitude, longitude, and the depth of krill swarms, were obtained from logbooks. A total of 20 pairs of hauls were matched at similar times and overlapping fishing grounds (within a difference of the operating time 2 h, the operating latitude and longitude 10′, and the depth of krill swarms 10 m) of subarea 48.1, from February 16 to April 27, 2018. Those hauls of FRH were named FRH-xxx (haul number), and those of LT were named LT-xxx (haul number). The fishing grounds were concentrated on 61.75–63.06 S, 59.05–61.22 W, and the fishing sites were the median site of set down and up of the haul (Figure 1).
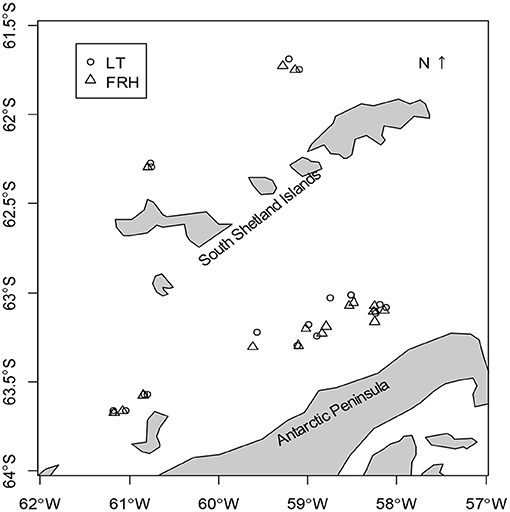
Figure 1. Fishing sites of LT (circle) and FRH (triangle) of matched hauls.
Size frequency distribution and cumulative size frequency distribution analyses were used to compare length distributions of krill caught during the cruises between the two trawls. The analysis was carried out for each trawl separately as follows: Let nli be the number belonging to length class l of krill caught and length measured in fishing haul i with that trawl (LT's or FRH's). Based on this information, the size frequency distribution Dnl and the cumulative size frequency distribution CDnL were obtained by:
The summations of i and l in Eqs. (1) and (2) are over the h hauls conducted during the cruise with the trawl and length classes l, respectively. The term CDnL quantifies the proportion of a total catch up to a given length class L.
The analysis according to Eqs. (1) and (2) was conducted using the statistical analysis tool SELNET (Herrmann et al., 2013, 2020; Herrmann, 2020; Melli et al., 2020), and the double bootstrapping technique implemented with this tool was used to estimate 95% CIs. The double bootstrapping method considered both the between-haul variability in the structure of the population captured in the trawl and the within-haul variability due to limited numbers of krill captured in that specific haul (Herrmann et al., 2017). Specifically, the double bootstrap procedure accounted for between-haul variability by selecting hauls h with replacement from the total number of hauls h conducted with the specific trawl. Within-haul uncertainty was accounted for by resampling with replacement from the catch of krill. The number resampled in the haul in this inner bootstrap loop equaled the total number of individuals of the species length measured in the catch for the selected haul. One thousand bootstrap repetitions were conducted and used to estimate the 95% Efron percentile CIs (Efron, 1982) for Dnl and CDnl.
Using the catch data from the sea trials, we conducted length-dependent catch comparison and catch ratio analyses (Sistiaga et al., 2015; Herrmann et al., 2017) to determine whether there was a difference in catch efficiency and/or krill length between the trawls of trawler LT and FRH. The analysis was carried out independently for krill following the description below.
To assess the relative length-dependent catch comparison rate (CCl) of changing from FRH's to LT's trawl, we used Eq. (3):
where nFRHlj and nLTlj are the number n of krill investigated caught per length class l for the trawl of FRH and LT, respectively, in pair j of the alternated hauls.
Terms qFRHj and qLTj are the subsampling ratios introduced to account for unequal catch and towing time between the FRH's trawl (tFRHj) and the LT's trawl (tLTj) in the pair j. qFRHj and qLTj were calculated as follows:
where WFRH−sampling−j and WLT−sampling−j are the weight of krill be sampling from the trawl of FRH and LT, respectively, in pair j of the matched hauls. WFRHjand WTLj are the catch weight of krill by the trawl of FRH and LT, respectively, in pair j of the matched hauls.
In Eq. (3), h is the number of matched hauls made with the trawls of FRH and LT. The functional description of the catch comparison rate CC(l,v) expressed by Eq. (3) was obtained using maximum likelihood estimation by minimizing Eq. (5):
In Eq. (5), v represents the parameters describing the catch comparison curve defined by CC(l,v). When the catch efficiency of the two trawls is equal, the catch comparison rate would be 0.5. A catch comparison rate value with 95% CI below 0.5 would imply there is a significant length-dependent catch effect for length class l with fewer krill of length class l caught in the FRH's trawl, and vice versa for a catch comparison rate above 0.5. The experimental CCl was modeled by the function CC(l,v):
In Eq. (6) f is a polynomial of order k with coefficients v0– vk, such that v = (v0,. . . , vk). The values of the parameters v describing CC(l,v) are estimated by minimizing Eq. (5). We considered f of up to an order of 4 with parameters v0, v1, v2, v3, and v4 as our experience from prior studies (Krag et al., 2015; Santos et al., 2016) has demonstrated that this provides a model that can sufficiently describe the catch comparison curves between two fishing gears. Leaving out one or more of the parameters v0. . .v4, at a time resulted in 31 additional candidate models for the catch comparison function CC(l,v). Among these models, the catch comparison rate was estimated using multi-model inference to obtain a combined model (Burnham and Anderson, 2002; Herrmann et al., 2017). Specifically, the models were ranked and weighted in the estimation according to their AICc values (Burnham and Anderson, 2002). The AICc is calculated as the AIC (Akaike, 1974), but it includes a correction for finite sample sizes in the data. Models that resulted in AICc values within +10 of the value of the model with the lowest AICc value (AICcmin) were considered for the estimation of CC(l,v) following the procedure described in Katsanevakis (2006) and in Herrmann et al. (2015). We use the name combined model for the result of this multi-model averaging and calculated it using Eq. (7):
where the summations are over the models with an AICc value within +10 of AICcmin. The ability of the combined model to describe the data was based on the p-value, which is calculated based on the model deviance and degrees of freedom (Wileman et al., 1996; Herrmann et al., 2017). Thus, suitable fit statistics for the combined model to describe the data sufficiently well should include a p-value > 0.05 and a deviance value within approximately two times the degrees of freedom.
To provide a direct relative value of the catch efficiency between fishing of FRH's and LT's trawl, the following catch ratio CR(l,v) equation was used:
Thus, if the catch efficiency of both gears is equal, CR(l,v) will be 1.0.
Likewise, for the catch pattern analysis, we used a double bootstrapping method to estimate the CIs for the catch comparison and catch ratio curves. However, the resampling technique differed. Specifically, the procedure applied here accounts for uncertainty due to between haul variation by selecting h paired hauls with replacement from the h paired hauls available during each bootstrap repetition. Within each resampled haul, the data for each length class was resampled in an inner bootstrap to account for the uncertainty in the haul due to a finite number of krill being caught and length measured in the paired haul. The resulting data set obtained from each bootstrap repetition was analyzed as described above and therefore also accounted for uncertainty in model selection and model averaging because the multi-model inference was included (Grimaldo et al., 2018). Based on the bootstrap results, we estimated the Efron percentile 95% CIs (Efron, 1982) for both the catch comparison and catch ratio curve. We performed 1,000 bootstrap repetitions. The catch comparison and catch ratio analysis was conducted with the analysis tool SELNET (Bent Herrmann, Trondheim, Norway), which was also used in the catch pattern analysis.
In 20 sets of matched hauls, the krill lengths in the catches of the LT's trawl ranged from 22.9 to 60.3 mm with an average of 40.1 ± 5.9 mm (mean ± SD). The lengths of 200 krill in each haul mostly showed a thin tail (kurtosis <3) and left-skewed (skewness <0) distribution. The krill lengths in the catches of the FRH's trawl ranged from 30.1 to 57.9 mm with an average of 42.1 ± 4.4 mm (mean ± SD). The lengths of 200 krill in each haul mostly showed a thin tail (kurtosis <3) and right-skewed (skewness >0) distribution. Overall, the length composition of krill in the catches of both trawls differed significantly (p < 0.05). Indeed, 17 sets of 20 matched hauls were significantly different (p < 0.05) (Table 2). The average lengths of krill caught by the LT's trawl were smaller than those caught by the FRH's trawl in all matched hauls. The differences were 0.2–5.4 mm, mainly 1–3 mm, with an average of 2.1 ± 1.4 mm (mean ± SD). The krill length range in catches from trawler LT was larger than that of trawler FRH, and LT's catches contained more individual krill that were smaller than 35 mm (Figure 2).
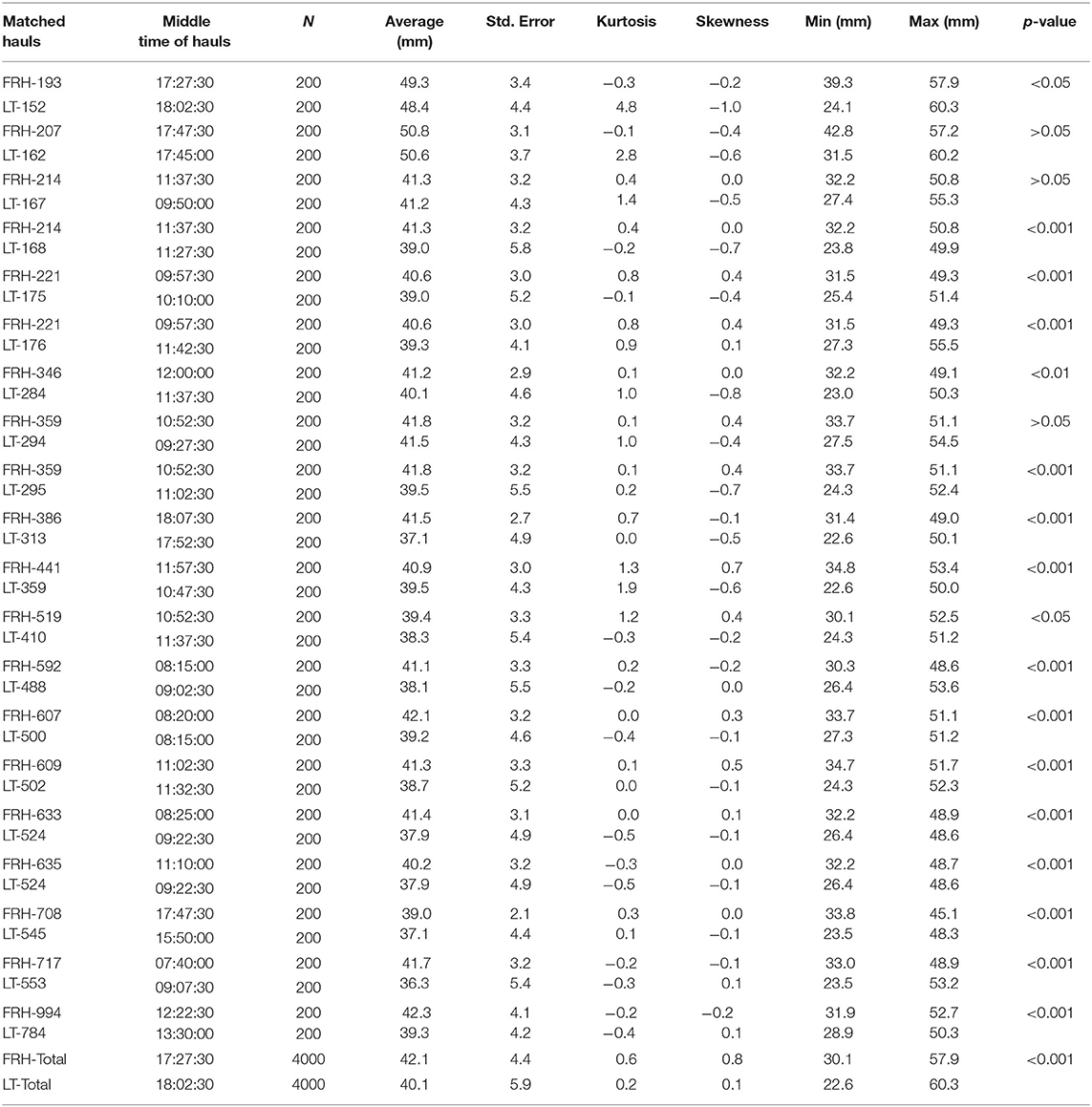
Table 2. Length composition of krill in catches of both trawls and differences of matched hauls.
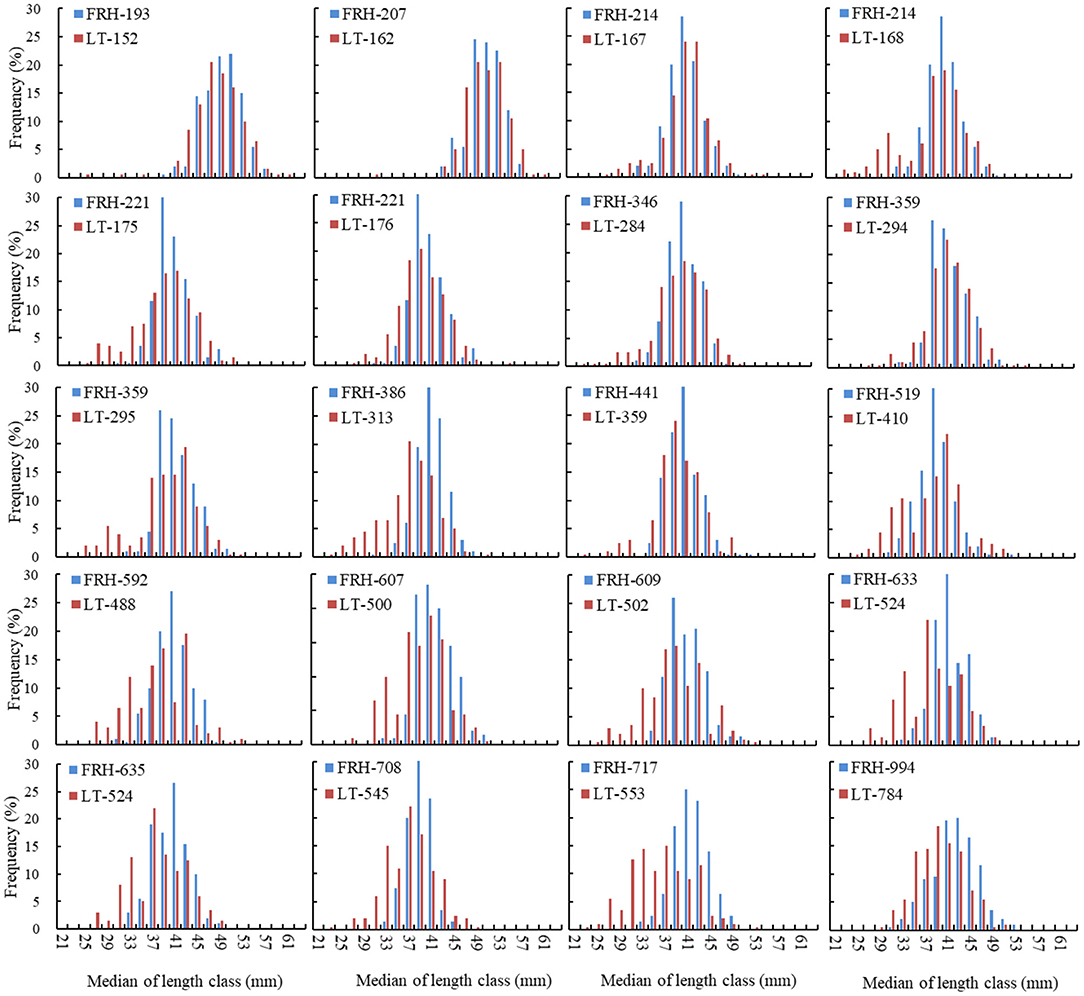
Figure 2. Inter-trawl differences of krill length frequencies in the catches of matched hauls.
Significant differences were shown in the comparison of the length-dependent catch densities and cumulative catch densities of krill between the FRH's trawl and LT's trawl. The krill length range in catches from LT's trawl was wider than that of FRH's trawl. Furthermore, the FRH's trawl caught few krill <30 mm, whereas the LT's trawl caught substantial numbers of them (Figure 3 Left). The cumulative density plots showed that in the LT's trawl, the catch would consist of a larger proportion of smaller krill than in the FRH's trawl (Figure 3 Right). The differences of the cumulative density of krill in the catches between both trawls decreased significantly with the lengths of krill over 40 mm.
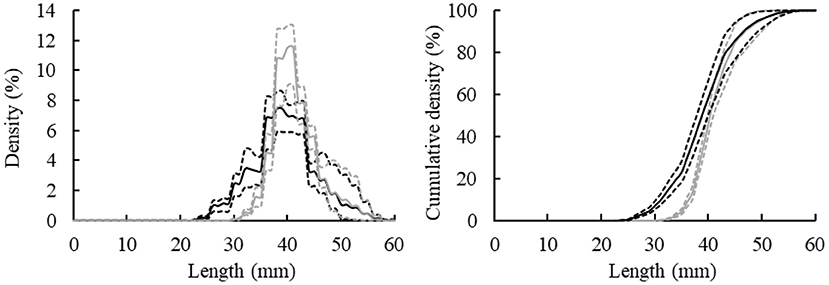
Figure 3. The left plot shows the densities of the different length classes of krill, with the LT's trawl (black) and the FRH's trawl (gray). The right plot shows the cumulative densities of krill, with the LT's trawl (black) and the FRH's trawl (gray). The stippled curves represent the 95% confidence bands.
The catch comparison analysis showed that the models used represented the data well (Figure 4 left). The fit statistics in Table 3 show that for krill the p-values are above 0.05, whereas the degrees of freedom are of the same magnitude as the deviance, meaning that the discrepancies observed between the model and the data are likely a coincidence.
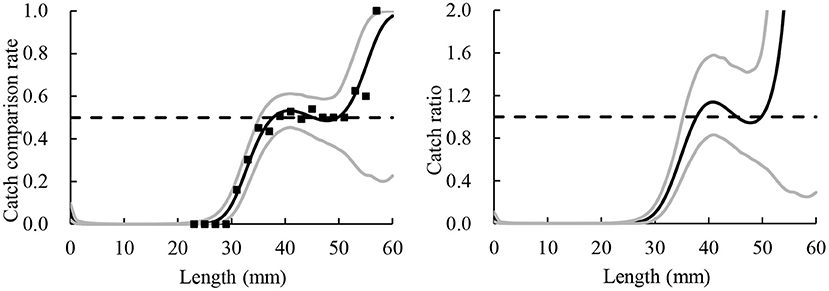
Figure 4. Catch comparison rate (left column) and catch ratio (right column) for krill for the LT's trawl vs. the FRH's trawl. The square marks represent the experimental rates. The thick black curve represents the modeled rate, and thin stippled curves represent the corresponding 95% confidence limits. The horizontal black stippled line shows the expected rate in case of no difference in catch efficiency between trawls.
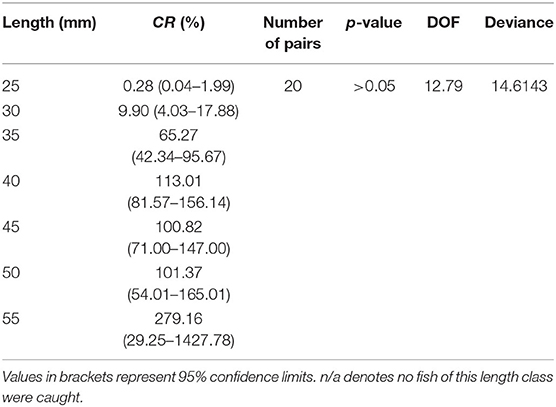
Table 3. Catch ratio results at different lengths and fit statistics for the catch comparison analysis for krill.
The catch ratio curves show in general values <1.00 for the smallest length classes, which means that the FRH's trawl captures fewer small krill than the LT's trawl. The catch ratio curve shows that the FRH's trawl catches significantly less krill below 38 mm than LT's trawl. Furthermore, the catch ratio becomes lower with decreasing krill size, which means that the difference between the catching ability of the two trawls increases with decreasing krill size (Figure 4 right). As both trawls caught equal krill when the CR equal 1.00 (100%), the results show for example that at 35 mm the FRH's was estimated to catch only 65.27% of what would be captured with the LT's trawl, whereas at 30 mm it was estimated to catch only 9.90% of what would be caught with the LT's trawl. However, it was estimated to catch 113.01% of what would be caught with the LT's trawl at 40 mm (Table 3).
The length composition of the krill swarm determines the population that can be caught by the krill trawls. Swarm characteristics and size distributions of krill varied in different areas and seasons (Miller et al., 1993; Siegel et al., 1998; Tarling et al., 2009). While on a small scale, no significant differences were found in the length composition of different krill swarms (Ricketts et al., 1992). Thus, in the present study, the nature swarm of krill caught by two trawls of the matched hauls can be considered the same swarm.
The results of this study showed that the catch patterns of two trawls from trawlers FRH and LT were significantly different. About 85% (17/20) of matched hauls caught significantly different length compositions of krill. The average lengths of krill caught by the LT's trawl were smaller than those caught by the FRH's trawl in all matched hauls (Table 2). The length range of krill in catches from LT's trawl was wider than that of FRH's trawl. Furthermore, the LT's trawl caught significantly higher proportions of unmatured krill (length <35 mm). The differences of catch densities and cumulative density of krill in the catches between both trawls decreased significantly with the lengths of krill over 40 mm. The catch ratio curve showed that the FRH's trawl catches significantly less krill below 38 mm than LT's trawl. Furthermore, the catch ratio of FRH's trawl becomes lower with decreasing krill size within 41 mm, inversely over 41 mm. Furthermore, there are three pairs of matched haul similarities of length compositions of krill that occur at sunrise (FRH-214 with LT-167; FRH-359 with LT-294) or sunset (FRH-207 with LT-162).
The influence of non-controllable factors (e.g., current and wind speed) on the caught difference of krill was basically negligible due to the similar times and overlapping fishing grounds of matched hauls. Kawaguchi et al. (2010) reported that in aquaria, dark objects either within or outside the tank, which would be perceived by the krill as a threat, forced the krill to the far side of the tank. Additionally, Everson and Bone (1986) reported that a low light level would reduce visual clues regarding the presence of net for krill. Therefore, three pairs of matched hauls which similarities of length compositions of krill occur when the low light visibility because that the krill would fail to sense the netting and keeps away from netting to avoid contacting the netting timely. Identically, there are three pairs of trawls in which the catch of FRH is compared with two catches of LT, which performed in the nearest coordinates in a short period of time (FRH-214 with LT-167, 168; FRH-221 with LT-175, 176; FRH-359 with LT-294, 295) showing different length distribution also because of the visual clue.
For the other 17 pairs of matched hauls during the day, the trawl netting might exert visual pressure on krill making them move away from the netting panel due to the fact that in daytime krill reacts strongly scaring to the effect of the netting (Czubek, 1981). However, smaller individuals would be less responsive to the visual pressure and have less chance of moving away from the netting to avoid contacting the netting due to weak swimming capacity (Johnson and Tarling, 2008). Therefore, small individuals have more chances to escape through the mesh of netting.
The difference of both trawls used by LT and FRH mainly originates from the following aspects: (1) the net dimension of the trawl used by FRH was smaller than that of LT. Thus, more krill have a chance to escape from the FRH's trawl because of the probability of krill contacting the netting during the operation was higher than that of LT. (2) The location of the liner netting was installed of the FRH's trawl shorter than that of the LT's trawl, which caused more krill with a wider range of lengths even larger individuals to escape through the larger mesh without liner netting of the trawl of FRH. In addition, the mesh size of the liner netting of the FRH's trawl was larger than LT's trawl (see details in Table 1). Thus, more krill with a wider range of lengths even larger individuals have the probability to escape pass through the larger mesh part of liner netting of the FRH's trawl. However, only small krill have more probability to escape pass through the mesh with the same smaller size of the liner netting of the trawl body of the LT's trawl. Thereby, these two factors caused more krill with a wider length range even larger individuals to escape through the mesh of the FRH's trawl. (3) The towing speed of the FRH's trawl [3.05 ± 0.29 kn (mean ± SD)] during the operation was higher than that of the LT's trawl [2.51 ± 0.25 kn (mean ± SD)], whereas the swimming ability of krill was relatively weak (Marr, 1962). Thus, more krill may escape through the larger mesh due to the high speed during the towing process. Therefore, the main factors causing the inter-trawl caught difference of krill of matched haul during daytime fishing were inferred to be the controllable factors, such as the structure of trawls, net dimensions, mesh sizes, and operating parameters, e.g., towing speed.
The scientific survey of fisheries is an important supplement to large-scale scientific investigations and assessments of krill resources. Studying the catch pattern and catch ratio aids to understand the differences in selectivity properties and catch efficiency of the different commercial trawls and that increases the quality of comparative analysis of scientific data collected by scientific observers onboard the commercial trawls. This is important for the management of krill resources and the ecosystem of the Antarctic Ocean. However, the krill caught by both trawls at similar times and overlapping fishing grounds may still not be the same swarm because of the irregular distribution of krill swarms. In the future, observers from different fishing vessels can coordinate their observation time with each other to increase the number of matches haul that can be analyzed. Furthermore, analyzing the observed deviation of the observer by measurement of the same sample. This provides more accurate krill distribution data to study the differences or similarities between different regions or of the same region between different years.
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author/s.
ZW and BH conceived the original ideas and analyzed the data. HT and LX funded the study and collected the data. ZW and HT wrote the first draft of the manuscript. All authors contributed substantially to revisions.
This study was financially supported by the National Natural Science Foundation of China (Grand No. 31902426), the Shanghai Sailing Program (19YF1419800), and the special project for the exploitation and utilization of Antarctic biological resources of the Ministry of Agriculture and Rural Affairs.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
The authors thank the scientific observers who collected the scientific data onboard commercial trawlers Long Teng and Fu Rong Hai. They thank Dr Paul Winger who recommended the SELNET software to analyze the data and also thank BH for granting permission to use the SELNET for current and future studies.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fmars.2021.670663/full#supplementary-material
Akaike, H. (1974). A new look at the statistical model identification. IEEE Trans. Automat. Contr. 19, 716–723. doi: 10.1109/TAC.1974.1100705
Burnham, K. P., and Anderson, D. R. (2002). Model Selection and Multimodel Inference: A Practical Information-Theoretic Approach, second ed. New Yory, NY: Springer.
CCAMLR (2011). Scientific committee for the conservation of Antarctic marine living resources: report of the Thirtieth Meeting of the Scientific Committee. Hobart, Australia,. SC-CAMLR-XXX.
CCAMLR (2020a). Krill fisheries. Available online at: https://www.ccamlr.org/en/fisheries/krill (accessed September 10, 2021).
CCAMLR (2020b). Krill fisheries. Available online at: https://www.ccamlr.org/en/system/files/gear_diagrams/100221-net2-gear-diagram-longteng-2018.jpg (accessed September 10, 2021).
CCAMLR (2020c). Krill fisheries. Available online at: https://www.ccamlr.org/en/system/files/gear_diagrams/100218-net1-gear-diagram-furonghai-2018.jpg (accessed September 10, 2021).
Czubek, H. (1981). Studies on performance capacity and selectivity of trawls used for Antarctic krill fisheries. Polish polar research 2, 131–142.
Efron, B. (1982). “The jackknife, the bootstrap and other resampling plans,” in SIAM Monograph, No 38, CBSM-NSF.
Everson, I., and Bone, D. G. (1986). Effectiveness of the RMT8 system for sampling krill (Euphausia superba) swarms. Polar Bio. 6, 83–90. doi: 10.1007/BF00258257
Godø, O. R., Reiss, C., Siegel, V., and Watkins, J. L (2014). Commercial fishing vessel as research vessels in the Antarctic—requirements and solutions exemplified with a new vessel. CCAMLR Science 21, 1–7.
Grimaldo, E., Sistiaga, M., Herrmann, B., Larsen, R. B., Brinkhof, J., and Tatone, I. (2018). Improving release efficiency of cod (Gadus morhua) and haddock (Melanogrammus aeglefinus) in the Barents Sea demersal trawl fishery by stimulating escape behaviour. Canad. J. Fisher. Aquat. Sci. 75, 402–416. doi: 10.1139/cjfas-2017-0002
Herrmann, B. (2020). SELNET_v201. Available online at: https://www.researchgate.net/publication/347559959_selnet_v201 (accessed September 10, 2021).
Herrmann, B., Krag, L. A., and Krafft, B. A. (2018). Size selection of Antarctic krill (Euphausia superba) in a commercial codend and trawl body. Fish. Res. 207, 49–54. doi: 10.1016/j.fishres.2018.05.028
Herrmann, B., Sistiaga, M., Larsen, R. B., Brinkhof, J., Gjøsund, S. H., Jacques, N., et al. (2020). Catch pattern and size selectivity for a gear designed to prevent fish injuries during the capture process in a North-East Atlantic demersal trawl fishery - ScienceDirect. Reg. Stud. Marine Sci. 40, 1–11. doi: 10.1016/j.rsma.2020.101525
Herrmann, B., Sistiaga, M., Larsen, R. B., Nielsen, K. N., and Grimaldo, E. (2013). Understanding sorting grid and codend size selectivity of Greenland halibut (Reinhardtius hippoglossoides). Fish. Res. 146, 59–73. doi: 10.1016/j.fishres.2013.04.004
Herrmann, B., Sistiaga, M., and Tatone, I. (2017). Estimation of the effect of gear design changes on catch efficiency: methodology and a case study for a Spanish longline fishery targeting hake (Merluccius merluccius). Fish. Res. 185, 153–160. doi: 10.1016/j.fishres.2016.09.013
Herrmann, B., Wienbeck, H., Karlsen, J. D., Stepputtis, D., Dahm, E., and Moderhak, W. (2015). Understanding the release efficiency of Atlantic cod (Gadus morhua) from trawls with a square mesh panel: effect of panel area, panel position, and stimulation of escape response. ICES J. Marine Sci. 72, 686–696. doi: 10.1093/icesjms/fsu124
Johnson, M., and Tarling, G. (2008). Influence of individual state on swimming capacity and behaviour of Antarctic krill Euphausia superba. Mar. Ecol. Prog. Ser. 366, 99–110. doi: 10.3354/meps07533
Kasatkina, S. M. (1997). Selectivity of commercial and research trawls in relation to krill. CCAMLR Sci. 4, 161–169.
Kasatkina, S. M. (2017). Analysis of inter-vessel variability of krill length distribution in the catches obtained in the fishery in the Bransfield Strait Subarea 48.1). WG-EMM 17:28.
Katsanevakis, S. (2006). Modeling fish growth: model selection, multi-model inference and model selection uncertainty. Fish. Res. 81, 229–235. doi: 10.1016/j.fishres.2006.07.002
Kawaguchi, S., King, R., Meijers, R., Osborn, J. E., Swadling, K. M., Ritz, D. A., and Nicol, S. (2010). An experimental aquarium for observing the schooling behaviour of Antarctic krill (Euphausia superba). Deep-Sea Res. Part II-Top. Stud. Oceanograph. 57, 683–692. doi: 10.1016/j.dsr2.2009.10.017
Kawaguchi, S., and Nicol, S. (2007). Learning about Antarctic krill from the fishery. Antar. Sci. 19, 219–230. doi: 10.1017/S0954102007000296
Krag, L. A., Herrmann, B., Iversen, S. A., Engås, A., Nordrum, S., and Krafft, B. A. (2014). Size Selection of Antarctic Krill (Euphausia superba) in Trawls. PLoS ONE 9:e102168. doi: 10.1371/journal.pone.0102168
Krag, L. A., Herrmann, B., Karlsen, J. D., and Mieske, B. (2015). Species selectivity in different sized topless trawl designs - does size matters?. Fish. Res. 172, 243–249. doi: 10.1016/j.fishres.2015.07.010
Krag, L. A., Krafft, B. A., Engås, A., and Herrmann, B. (2018). Collecting size-selectivity data for Antarctc krill (Euphausia superba) with a trawl independent towing rig. PLoS ONE 13:e0202027. doi: 10.1371/journal.pone.0202027
Marr, J. W. S. (1962). The natural history and geography of the Antarctic krill (Euphausia superba Dana). Discov. Rep. 32, 33–464.
Melli, V., Herrmann, B., Karlsen, J. D., Feekings, J. P., and Krag, L. A (2020). Predicting optimal combinations of bycatch reduction devices in trawl gears: a meta-analytical approach. Fish Fisher. 21, 252–268. doi: 10.1111/faf.12428
Miller, D. G. M., Barange, M., Klindt, H., Murray, A. W. A., Hampton, I., and Siegel, V. (1993). Antarctic krill aggregation characteristics from acoustic observations in the Southwest Atlantic Ocean[J]. Mar. Biol. 117, 171–183. doi: 10.1007/BF00346440
Okuda, T., and Kiyota, M. (2012). Analysis of variability of krill size and fish by-catch in Japanese krill fishery based on scientific observer data. CCAMLR Sci. 19, 31–47.
Ricketts, C., Watkins, J. L., Priddle, J., Morris, D. J., and Buchholz, F. (1992). An assessment of the biological and acoustic characteristics of swarms of Antarctic krill. Deep Sea Res. Part A Oceanograph. Res. Pap. 39, 359–371. doi: 10.1016/0198-0149(92)90113-8
Santos, J., Herrmann, B., Mieske, B., Stepputtis, D., Krumme, U., and Nilsson, H. (2016). Reducing flatfish by-catches in roundfish fisheries. Fish. Res. 184, 64–73. doi: 10.1016/j.fishres.2015.08.025
Siegel, V., Damm, U., and Sushin, V. A. (1998). Catch per unit effort (CPUE) data from the early years of commercial krill fishing operations in the Atlantic sector of the Antarctic. CCAMLR Sci. 5, 31–50.
Sistiaga, M., Herrmann, B., Grimaldo, E., Larsen, R. B., and Tatone, I. (2015). Effect of lifting the sweeps on bottom trawling catch efficiency: a study based on the Northeast arctic cod (Gadus morhua) trawl fishery. Fish. Res. 167, 164–173. doi: 10.1016/j.fishres.2015.01.015
Tarling, G. A., Klevjer, T., Fielding, S., Watkins, J., Atkinson, A., Murphy, E., et al. (2009). Variability and predictability of Antarctic krill swarm structure[J]. Deep Sea Res. Part I: Oceanograph. Res. Pap. 56, 1994–2012. doi: 10.1016/j.dsr.2009.07.004
Wileman, D., Ferro, R.S.T., Fonteyne, R., and Millar, R.B. (1996). Manual of Methods of Measuring the Selectivity of Towed Fishing Gears. ICES Cooperative Research Report. No. 215.
Zhu, G., Xu, Y., Xia, H., Li, Y., Zhu, X., Xu, P., et al. (2013). Spatial-temporal variation on fishing ground of Chinese Antarctic krill fishery in 2009/2010 to 2011/2012 fishing season. J. Shanghai Ocean Univ. 22, 425–431.
Keywords: Antarctic krill, trawls, length composition, inter-trawler, catch ratio
Citation: Wang Z, Tang H, Herrmann B and Xu L (2021) Catch Pattern for Antarctic krill (Euphausia superba) of Different Commercial Trawls in Similar Times and Overlapping Fishing Grounds. Front. Mar. Sci. 8:670663. doi: 10.3389/fmars.2021.670663
Received: 22 February 2021; Accepted: 30 August 2021;
Published: 28 September 2021.
Edited by:
Huang Wei, Second Institute of Oceanography, Ministry of Natural Resources, ChinaReviewed by:
Svetlana Kasatkina, Atlantic branch of All Russian Research Institute of Fisheries and Oceanography, RussiaCopyright © 2021 Wang, Tang, Herrmann and Xu. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Hao Tang, aHRhbmdAc2hvdS5lZHUuY24=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.