 Claudia Luger-Bazinger
Claudia Luger-Bazinger Eva Hollauf
Eva Hollauf Hatun Atasayar2
Hatun Atasayar2
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Future Transp. , 21 August 2023
Sec. Freight Transport and Logistics
Volume 4 - 2023 | https://doi.org/10.3389/ffutr.2023.1174956
This article is part of the Research Topic Women in Transportation Research 2022 View all 4 articles
Efforts to advance Autonomous Vehicles (AVs) have taken on a central role in research and development in recent years and will have a significant influence on road traffic in the future. Research on AVs has mainly focused on the technology itself and the direct users of AVs and their acceptance. However, the role of bicyclists, interacting with AVs in traffic, is not yet researched as thoroughly. Using a mixed methods approach, we combine quantitative results from a survey among bicyclists (N = 889) and qualitative results from a focus group (N = 19) to give insights into bicyclists’ attitudes and expectations towards self-driving cars. The results showed that bicyclists’ affinity for technology is a significant predictor for both their trust and perceived safety towards self-driving cars, as well as an effect of age and gender on these variables. Both from the quantitative and qualitative results, it is clear that flawless functioning of the technology of AVs is a prerequisite for bicyclists encountering and interacting with AVs in traffic, and that the status of the vehicle (autonomous vs. non-autonomous) is very important as well as easy to understand signals that indicate the next manoeuvres of the AV. For supporting interaction with AVs, we found that bicyclists are open to External Human Machine Interface (eHMI) solutions, as long as these ensure inclusion and support the easily-accessible nature of bicycling. Our findings can inform the design of eHMIs that help shape the interaction between bicyclists and AVs in the future, and provide insights on which factors determine the perception of AVs and, ultimately, the acceptance of AVs as part of road traffic.
In recent years, considerable efforts have been invested into advancing autonomous driving, and the progress made in technological terms was substantial. However, Autonomous Vehicles (AVs), and especially cars with minimal involvement of a driver (SAE Level 4 and 5, SAE, 2018) will only prevail in our transport system if society accepts these technologies and resulting services (Nordhoff et al., 2018; Stegmüller et al., 2019; Mitteregger et al., 2020). For this, future developments will not only need to cater to the needs of direct users of AVs (e.g., people riding in self-driving cars), but also need to take into account other road users, especially vulnerable road users such as bicyclists (Botello et al., 2019). The role of bicyclists in traffic is usually discussed in the context of Vulnerable Road Users (VRUs), a term that describes a road user that lacks external protection, which includes pedestrians, motorcyclists and bicyclists. However, it can also reflect capability and can also be extended to children and the elderly (Pammer et al., 2021).
Many cities worldwide are already promoting more active mobility (e.g., bicycling, walking) to combat climate change and make cities more livable. While multiple problems are related to the issue of Global Greenhouse Gas (GHG) emissions, the choices for individual mobility are certainly contributing to the problem: Transport accounts for a quarter of Europe’s GHG emissions (European Environment Agency, 2018). Therefore, there is considerable interest of cities and policymakers to encourage bicycling, whether by improving infrastructure or by increasing motivation through informational campaigns. If this group of road users is expected to grow within the next few years, the needs and expectations of bicyclists must be taken into account when developing emerging technologies such as AVs (Penmetsa et al., 2019; Pettigrew et al., 2020). For AVs to be accepted as part of future traffic, it is important to design a subjectively and objectively safe interaction between bicyclists and AVs and include bicyclists in the process.
The perception of and attitude towards AVs is influenced by a number of variables, like sociodemographic characteristics such as age (Payre et al., 2014; Haboucha et al., 2017), gender (Hohenberger et al., 2016; Rice and Winter, 2019), income and educational level (Fraedrich et al., 2015; Haboucha et al., 2017). The most important factors for acceptance are perceived safety and trust regarding AVs (Kyriakidis et al., 2015; Hulse et al., 2018; Molnar et al., 2018; Panagiotopoulos and Dimitrakopoulos, 2018; Stegmüller et al., 2019; Howard and Dai, 2020; Luger-Bazinger et al., 2021). Indeed, safety of AVs is one of the biggest scepticisms within the public (Haeuslschmid et al., 2017; Hewitt et al., 2019; Bakalos et al., 2020). People feel safe when their perception of danger decreases while their perception of comfort increases when interacting with technology (Bartneck et al., 2009), and while the objective safety of a technology such as an AV can be improved by engineering, the perceived or subjective safety of these technologies plays a critical role in the adoption and use of AVs (Lee et al., 2015). Safety is also important if one is only interacting with an AV, but not actively using it, for example, subjective traffic safety relates to fear of accidents (Salonen, 2018). As Level 4 and especially Level 5 AVs (in which no human involvement in driving the AV is required) would be a new form of transport with the lack of a human driver, road users need to trust these AVs as a necessary prerequisite of acceptance (as research on the acceptance of automated systems has shown, Parasuraman and Riley, 2016). This is of course not only limited to people actively using an AV, but also people sharing the road with an AV, such as bicyclists.
With the emergence of new technologies, the Technology Acceptance Model (TAM) (Davis, 1989) or a modification of this model, like the Unified Theory of Acceptance and Use of Technology model (UTAUT, Venkatesh et al., 2003) is usually discussed as a predictor of whether people have the intention to use the technology in the future, and this is also explored with automated driving (Madigan et al., 2017; Koul et al., 2018). However, bicyclists in the role of VRUs are not the ones choosing the technology to interact with (i.e., the AVs), but must do so in traffic. Yet the TAM, with its determinants perceived usefulness and ease of use, does not accurately represent this. Affinity for technology describes a personality trait whereby one interacts intensively with technology (Franke et al., 2018) and has not yet been discussed in the context of interaction between AVs and VRUs. Affinity for technology in general might be an important and more suitable factor that influences the attitude towards AVs. Affinity for technology would also be relevant if there is communication and interaction between a bicyclist and an AV using External Human Machine Interfaces (eHMIs) that communicate the vehicle’s intention to other road users. The use of eHMIs and their influence on trust and acceptance of VRUs has been studied extensively in recent years.
Much of the research on AVs focuses on the technology itself as well as on the actual users of the AVs and their acceptance of AVs (Bazilinskyy et al., 2015; Kyriakidis et al., 2015; Nordhoff et al., 2019). The role of bicyclists, interacting with AVs in traffic, is not yet researched as thoroughly (Hagenzieker et al., 2019). Many studies investigate the detection of bicyclists from the technical perspective of AVs (Li et al., 2017; Grigoropoulos et al., 2021), and how bicyclists could do their part in being technically detected by AVs in traffic, such as using consistent hand signals (Pettigrew et al., 2020). However, fewer have explored the interaction from the bicyclists’ perspectives (Penmetsa et al., 2019). VRUs such as pedestrians, bicyclists and powered two-wheeler riders seem to have less trust in AVs than car drivers, attributing it to greater concerns about their subjective safety (Schrauth et al., 2021); in the same study, trust in and enthusiasm for the technology were discussed to determine the amount of acceptance that VRUs have for AVs. In a survey (Rahman et al., 2021), perceptions of VRUs towards AVs were explored: Negative perceptions mostly included a lack of perceived safety, less comfort around AVs and less trust in the AV technology, and bicyclists were also concerned about technology issues. In addition, they reported that perceptions of VRUs were significantly influenced by their familiarity with the technology of AVs.
Perceived safety of bicyclists in regard to AVs is also of research interest: Bicyclists who have no previous experience with sharing the road with an AV were more negative than those who already had experience (Penmetsa et al., 2019), which is a common finding in regard to AVs (Eden et al., 2017; Hilgarter and Granig, 2020). Pammer et al. (2021) showed that bicyclists would trust an AV more than a human driver, this was especially true for younger bicyclists. They discussed that this implies their socially utilitarian viewpoint on AVs, where cyclists believe that AVs will automatically protect the most vulnerable road users in the event of an accident. Similarly to this effect of age, Pyrialakou et al. (2020) showed that survey participants sent to a test area for AVs reported feeling safer riding in a car next to an AV than when walking or cycling nearby, and that male and younger participants were more positive towards AVs. In addition, they also reported a relation of sociodemographic characteristics of bicyclists on the attitude towards AVs, such as gender and age (Pyrialakou et al., 2020), but also familiarity with technology seems to be a determinant for bicyclists.
One central element that is missing in the interaction with an AV is the opportunity of the bicyclist to communicate with a human driver (e.g., observing hand gestures, eye contact). It has been suggested that eHMI could be a solution for this issue, especially in ambiguous situations or in cases where the AV and the bicyclist need to reach an agreement on how to proceed within traffic (Li et al., 2021). In a simulation study, Kaß et al. (2020) explored the effect of eHMI on an AV and on the behaviour of bicyclists and found that this led to mixed results: eHMI led to more effective and efficient behaviour of bicyclists when the AV braked. However, the eHMI provoked safety-critical behaviour when the AV continued driving and did not yield right of way. Related to this issue of yielding right of way in traffic, Hagenzieker et al. (2019) found in a photo experiment that bicyclists have a conservative, rather cautious disposition towards automated cars and do not expect to be noticed more often than by conventional cars, but seemed to have more confidence in automated cars when they have right of way over the vehicle. To gain knowledge about the future interaction between AVs and bicyclists, Berge et al. (2022) investigated the desire of bicyclists for eHMIs and design preferences in an interview study. They found that eHMIs are seen as helpful indicators of the AV’s intention, add more predictability in mixed or full-automated traffic and hold the potential of increasing the perceived safety of bicyclists by allowing them to interact or communicate a warning. In this context, however, a much-discussed technology-related aspect is that bicyclists may put too much trust in eHMIs or similar devices and their cautiousness and awareness of the situation in traffic decreases (Berge et al., 2022). Therefore, the primary prerequisite for AVs to be allowed to participate in road traffic should be that they are able to detect other road users as such and technology must be sufficiently advanced to ensure road safety. From an expert point of view, eHMI will be an essential aspect of future traffic (Tabone et al., 2021). Anthropomorphic eHMIs are found as an interesting research field; nevertheless, some experts consider the usage of such elements as critical, as communication via eHMIs should focus on the correct detection of the VRU and that the status and intention of the AV is been communicated correctly to the other road users (Merat et al., 2018; Tabone et al., 2021). The design preferences of an on-bike information device focus on screens and displays, which should visualize the information in a simple way, with familiar icons and colours. Another possibility mentioned is using applications on wearables, such as smartwatches or smartphones detachable on the handlebars (Berge et al., 2022).
With a mixed method explanatory sequential approach, we wanted to expand research on attitudes, perceptions and expectations of bicyclists towards AVs. We build on results that were identified as relevant for AV users as discussed in the introduction, and expand this to bicyclists, who are not actively using an AV, but rather sharing the road with an AV. In the present study, we wanted to explore the following aspects:
• Perceived safety and trust are important factors which will determine subsequent acceptance of AVs. Variables such as gender and age have been discussed previously to have an influence on perceived safety and trust and we wanted to explore this relationship in our study, with the hypotheses that younger or male bicyclists have more trust and perceive AVs as safer than older or female bicyclists.
• Bicyclists’ affinity for technology could also affect their attitude towards AVs, an influence which has not been explored before, with the hypothesis that a higher affinity leads to a more positive view of AVs.
• Further, we aimed to explore bicyclists’ attitudes towards communication and interaction with AVs in order to help design eHMIs for future traffic that aid interaction between bicyclists and AVs and foster acceptance of the latter. Important aspects for us were expectations of bicyclists that might impact purpose or design of the eHMI. eHMI could be used for messages to bicyclists to increase their safety, in addition, previous studies have suggested that eHMIs are especially important when it comes to recognizing that one is encountering an AV (status of AV: autonomous vs. non-autonomous) and what the AV would do next (Hagenzieker et al., 2019). We wanted to gather bicyclists’ preferences about this development to expand research.
We used a mixed method explanatory sequential approach that is characterized by an initial quantitative data collection and analysis, followed by a qualitative data collection and analysis to explain and interpret the survey findings (Creswell, 2003).
An online survey was conducted in Germany and Austria via the online tool Limesurvey in February and March 2021. The link to the survey was distributed to online bicycling communities. The technical setting of the survey resulted in no missing data (answering open-ended questions was optional). The time required to complete the survey was about 12 min, and participants had the chance to win prizes (e.g., subscription to a bicycling app) as an incentive. GDPR compliance was followed within the survey. Detailed information on the GDPR as well as introduction for participants, items and scales used in the survey can be found in the appendix.
In the first part of the survey, we included questions about socio-demographic aspects and about bicycling behaviour, habits and experiences of traffic as a bicyclist. Participants were asked whether they feel safe as bicyclists in traffic as well as whether they feel seen as bicyclists in traffic.
In the second part, we assessed attitudes towards self-driving cars and for this, the concept of self-driving car (SAE level 4 or 5) was introduced and explained and participants were reminded to think about the self-driving car from their perspective as bicyclists. For measuring attitude, we developed two items specifically based on factors that were found relevant for further acceptance of AVs, namely, perceived safety and trust (e.g., Howard and Dai, 2020; Luger-Bazinger et al., 2021). Participants of the survey were also asked about whether they would like to know if they encounter an AV in traffic by knowing about the status (autonomous vs. non-autonomous) and whether they would like to be informed about the next manoeuvre of the AV, as previous studies have indicated that these are important elements especially for eHMI design (Hagenzieker et al., 2019; Kaß et al., 2020). In addition, we used an open-ended question to ask bicyclists what they would wish for from a self-driving car. Also, we asked participants about their suggestions and opinions on possibilities to interact with an AV, especially for the purpose of a warning in dangerous situations.
Finally, in the third part of the survey, for assessing technological affinity, we used the Affinity for Technology Interaction (ATI) scale (validated German translation) (Franke et al., 2018), measuring people’s tendency to actively engage with technology, i.e., whether they have the tendency to actively approach it and interact with it or whether they avoid interaction with technology. The ATI was previously validated (Franke et al., 2018) and was measured with 4 items with a 6-point Likert scale.
Following a mixed method sequential explanatory approach, the survey results were elaborated further in focus group discussions with lead users from bicycling communities in April 2021. The focus group method is particularly suitable for exploratory purposes at the beginning of a research process, but also for deeper interpretation of survey results or to find out the meanings behind certain attitudes and behaviours (Bloor et al., 2001; Breitenfelder et al., 2004) The participants for the focus group discussions were selected based on their responses to their Affinity for Technology score (higher score on the ATI scale), in order to go into a more engaging and construction discussion about interaction with AVs, as survey results showed that this factor has a positive influence on bicyclists’ perception of AVs (see Results section). Furthermore, the frequency of bicycle use (daily or multiple times a week) was a prerequisite for participation. However, after invitation to the focus groups, due to anonymity of the survey, individuals from the focus group could not be linked with their results from the survey directly. Questions asked in the focus groups can be found in the appendix.
The focus group was conducted online via Zoom. All participants agreed to the recording of the sessions and analysis and anonymous reporting of their results prior to the start of the focus groups. The participants were divided into three smaller groups to facilitate discussion, with two groups of male participants (N1 = 7, N2 = 8) and one group dedicated to female participants (N3 = 4), resulting in 19 participants in total.
After a general introduction to the topic of AVs and presentation of relevant results of the survey, the participants discussed in small groups (breakout sessions) the advantages and disadvantages of attitudes and perceptions towards AVs from a bicyclist’s perspective. In a first discussion round (40 min), participants focused on the potential of data-based Vehicle-to-Everything (V2X) communication, specifically, about what information they would like to receive from the AV as bicyclists, specifically to increase their safety. This discussion was building on the survey results about interaction between AVs and bicyclists via eHMIs. In the second discussion round (40 min), relevant modes for a potential eHMI for interacting with an AV were discussed, including a potential warning message for the bicyclists in case of dangerous situations.
Based on the research questions, the analysis of the focus group discussions concentrated especially on the aspects of trust, perceived safety, affinity for technology in regard to interaction and communication between bicyclists and AVs, and the attitudes towards preferred design of eHMIs to enhance bicyclists’ safety. For the contextual evaluation of the focus group discussions, the qualitative analysis software MAXQDA was used. After the transcription of the recordings of the focus group, the text segments were coded based on defined categories that represent the influencing factors that were identified previously from the literature (technical functioning, perceived safety, trust, and eHMI). The analysis of the focus group discussions was carried out deductively, based on the predefined codes defined from literature. The results of the focus groups are structured according to this coding.
889 participants completed the survey (67% male, 33% female), whereby the mean age was 43.2 years (SD = 12.6, min = 16, max = 86), 58% of participants live in a city with 500.000 inhabitants or more. All of them indicated that they ride their bicycle in traffic at least from time to time, which was used as a filter question to proceed with the survey. Therefore, all participants can be regarded as bicyclists.
In the first section of the survey, participants were asked about their habits and experiences as bicyclist in traffic as of today. 45% of participants indicated that they ride their bicycle multiple times a week, 42% ride their bicycle daily, 10% a couple times a month, 4% a couple times a year. Participants indicated their main trip purposes for which they use their bicycle for (more than one answer was possible): Number one trip purpose was commuting, followed by shopping for groceries and running errands, then followed by bicycling as sport activity (see Figure 1). More than 40% of participants answered that they strongly disagree or disagree with the statement that they feel safe in traffic as bicyclist. 54% of participants strongly disagreed or disagreed with the statement that they feel seen in traffic as a bicyclist.

FIGURE 1. Percentage of participants that ride their bicycle in road traffic for specific purposes (multiple answers possible).
To assess the consistency of the ATI scale, we used the reliability measure of Cronbach’s alpha, resulting in a high internal consistency of the ATI scale with its 4 items (α = .85). A summability score was calculated as a better measure for internal consistency (Goeman and Jong, 2018), which also led to a high result (summability = 0.59). For further analyses, a sum score of items was used. Results showed that men (M = 17.41, SD = 4.06, min = 14, max = 24) have higher affinity for technology than women (M = 14.05, SD = 4.70, min = 14, max = 24) (t = 10.49, p < 0.001) with a moderate effect size (d = 0.78).
For measuring the attitudes towards self-driving cars regarding perceived safety of AVs (M = 3.41) and trust in AVs (M = 3.35), boxplots of answers can be found in Figures 2, 3. For exploring the predictors of trust in and perceived safety of self-driving cars, we used multiple linear regression with ATI score, gender and age as predictors and trust as well as perceived safety as dependent variables. Results are shown in Table 1 (see also Figures 2, 3 for overview of the dependent variables). For trusting AVs, gender, age and ATI are all significant predictors, with ATI score and then age being the strongest predictors among them: Men have more trust in AVs than women; as age increases, trust in AVs decreases; as ATI score increases, trust in AVs increases. A similar result was observed for perceived safety of AVs, age and then ATIs are the strongest predictors: Men feel more perceived safety towards AVs than women; as age increases, perceived safety decreases; as ATI score increases, feeling of perceived safety also increases. The R squared of the overall models is small in both cases, however, it still shows that ATI is a strong predictor compared to the factors already discussed in the literature (such as gender and age), especially when it comes to trust.
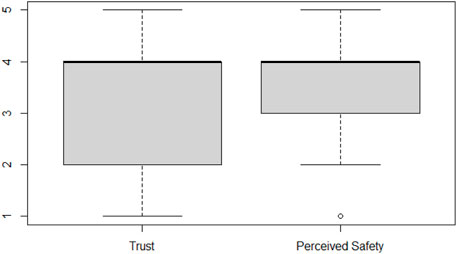
FIGURE 2. Boxplots of answers on 5-point Likert scale (1 = disagree, 5 = agree) to items that measure trust in AVs (As a bicyclist, I would trust self-driving cars) and perceived safety of AVs (As a bicyclist, I would consider self-driving cars as safe).
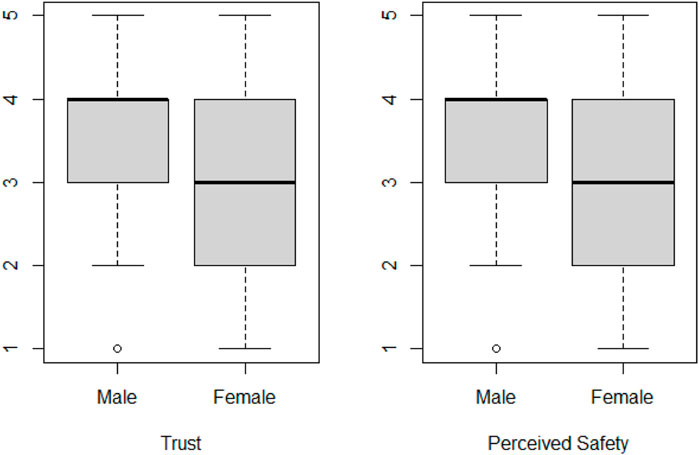
FIGURE 3. Boxplots of answers for men and women on 5-point Likert scale (1 = disagree, 5 = agree) to items that measure trust in AVs (As a bicyclist, I would trust self-driving cars) and perceived safety of AVs (As a bicyclist, I would consider self-driving cars as safe).
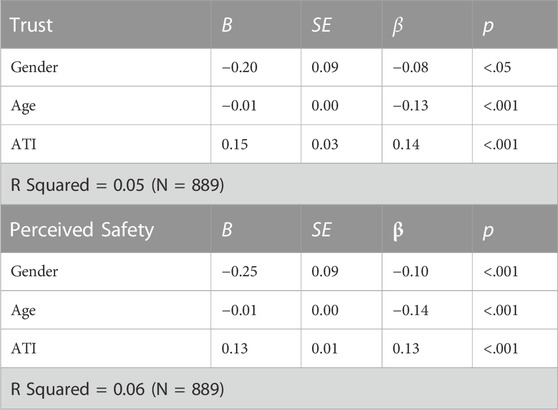
TABLE 1. Results from multiple regressions on trust and perceived safety as dependent variables and gender, age and ATI score as independent variables.
Results for answers on whether bicyclists would like to know that they encounter an AV in traffic (M = 3.68) and whether they would like to know about the next manoeuvre of the AV (M = 4.29) can be seen in Figure 4. We observed that women (M = 3.97, SD = 1.25) said that they rather wanted to know whether they encountered an AV than men (M = 3.54, SD = 1.42) (t = 4.66, p < 0.001), with a small effect size (d = .32). When asked whether bicyclists would like to know what the AV does next, we observed no significant difference between men and women (t = −0.20, p = 84), as mean values for men (M = 4.28) and women (M = 4.30) were both quite high.
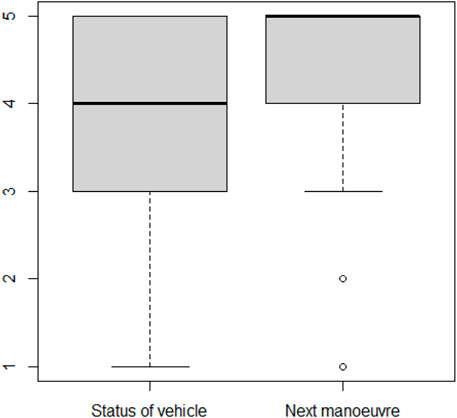
FIGURE 4. Boxplots of answers on 5-point Likert scale (1 = disagree, 5 = agree) to items that measure knowledge about the status of a vehicle (autonomous vs. non-autonomous) (As a bicyclist, I would like to know whether I encounter a self-driving car) and wanting to know about the AVs next manoeuvre (As a bicyclist, I would like to know what the self-driving car does next).
Participants were also asked what they would wish for in a self-driving car from their perspective as a bicyclist. 436 participants provided feedback to this open question (response was not mandatory), and answers were categorized into different categories following Agresti’s (2007) recommendation. We retrieved the following categories for participants’ answers: 1) Reliable technology of self-driving car (e.g., reliable detection of VRUs), 2) signals of the car (e.g., indicating whether the car has detected a bicyclists, signs that the car is self-driving), 3) abiding to traffic rules (e.g., car keeps minimum distance when overtaking a bicyclist) 4) overcoming human errors (e.g., no emotions or inattention guiding driving behaviour), 5) defensive driving style towards VRUs (e.g., very low speed or yielding towards bicyclists), 6) other answers (e.g., specific design ideas). As can be seen in Table 2, many participants wished for reliable technology, followed by signals of the car and it abiding to traffic rules.
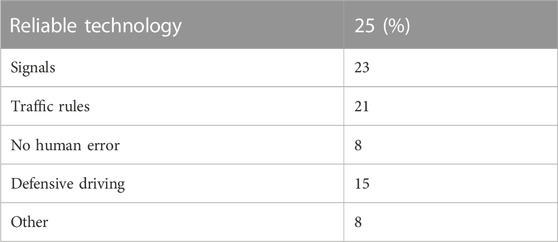
TABLE 2. Coding of open answers to the question of what bicyclists would wish for in a self-driving car (N = 436).
In the section about the possibility to interact with an AV with an eHMI for increased safety of bicyclists, we described the concept of warning signals (“We would like to ask you about effective warning signals for bicyclists in road traffic that help to reduce dangerous situations with cars and also accidents. Therefore, in this section we would like to identify what types of warning signals would be most suitable for bicyclists.”) and explained that these should help bicyclists to reduce dangerous situations and ask participants to answer questions from their perspective as a bicyclist. Participants were asked from which source they would find such a signal the most effective in a single-choice question: 46% of participants (N = 889) would prefer a warning signal on the bicycle itself (e.g., vibrating grips or sound), followed by 14% that would prefer signals from the environment and infrastructure, 13% would prefer the signal coming from wearable equipment (e.g., helmet), 12% would prefer a warning signal on the AV itself (e.g., display in front window screen), 7% would prefer a warning signal via their smartphone and 8% would choose another option (e.g., a warning signal to human passenger in AV).
19 participants with a high affinity for technology took part in the focus group discussions (79% male, 21% female), mean age was 41 years (SD = 12.3, min = 23, max = 63). The participants are frequent bicyclists (37% daily, 63% multiple times a week) and 27% of the participants live in a city with 500.000 inhabitants or more.
Technical functioning. Participants shared that the functioning of the autonomous system should be a prerequisite for AVs to be allowed to drive in road traffic. The detection of other road users should be ensured and the responsibility for compliance with traffic rules lies with the AV. Only if the autonomous system functions correctly, trust and acceptance among the bicyclists can increase.
“I see the bicycle as a low-threshold, low-cost vehicle and if that cannot be detected by the other autonomous road users, then it should not be allowed at all.” (M-10)
“[…] the whole action must come from the one who causes the danger and that is ultimately the vehicle.” (O-23)
Perceived safety. When interacting with an AV, the participants agreed that information about the status and intention of the AV increases the perceived safety in mixed traffic situations. The bicyclists should be informed that it is an AV, that it obeys the traffic rules and that it has detected the bicyclist. The eye contact exchanged with the driver in current traffic can be recreated with eHMI to convey this information to the bicyclist via acoustic, haptic or visual warning signals that are provided to the bicyclist, via wearable devices or on the AV itself. Warning signals, for example, in case the bicyclist enters a potentially dangerous situation, should be used depending on the situation, one suggestion was when approaching unclear intersections with high volume of traffic. This would avoid a possible overstimulation of the bicyclist due to too many or wrongly interpreted warnings. Some participants also mentioned the concern that bicyclists might be startled by a sudden warning signal and thus might feel more insecure or incautious.
“The fact that the car identifies itself as autonomous makes me feel a bit more secure.” (H-36)
“I would like to be warned only in these stressful situations, so that I can also be aware of the warnings.” (K-37)
“If I could gain a certain feeling of safety here, which is now really partly gained through eye contact, then I can definitely imagine that [the warning signal].” (C-w-64)
Trust. Among the focus group participants, there is a clear consensus that trust in the AV is particularly enhanced when it communicates the status (autonomous vs. non-autonomous) and its intention, compliance with traffic rules and correct detection of bicyclists as information to the bicyclist.
“It’s pleasant to know the vehicle is following the rules, it detected me, I can drive straight through without worrying, I do not have to brake or stop at every junction.” (H-36)
“[…] what I can imagine is that the car confirms to me that it will not violate the traffic rules.” (MF-19)
Although the participants also assume that technical errors do not occur in advanced AVs (SAE level 4 and 5), eHMI that transmits the aforementioned information from the AV in form of data-based Vehicle-to-Everything (V2X) communication is beneficial and desired. Nevertheless, from today’s point of view, putting all of one’s trust in a technical tool of any kind is not imaginable.
“I think it’s great if it's made easier in practice or if there’s more security through such technical devices. But it’s still a matter of trust somehow. Sure, you can check it [the situation] yourself, but I would not put all my trust in it [the technology].” (D-w-20)
eHMI. The suggestion to recreate communication between bicyclists and drivers by using eHMIs to communicate the status and intention of the AV to the bicyclist was particularly well received. In contrast, the majority of survey respondents (46%) preferred a signal on the bike itself to provide a warning. This insight was taken into the focus group discussion for further elaboration and to discuss other aspects of eHMI besides the possibility of a warning. It was emphasised by the focus group discussants that a bicycle is a low-threshold means of transport and should remain so, even in a road traffic system that may become highly technical in the future. The participants were sceptical about increased use of technology on a bicycle. If the communication between AVs and bicyclists takes place via additional equipment (e.g., haptic signals via gadgets for the handlebars), certain people will be excluded from this interaction in road traffic if they do not have such a device, additional costs were also a concern. One way to counteract this exclusion is to use devices that are already in use. Nevertheless, the participants referred to smartphones as possible on-bike devices, as these are already frequently used as navigation devices. Integrated in existing navigation applications, the information of surrounding vehicles may be visualized in a virtual roadmap–without being an additional distraction for the bicyclists. Moreover, the smartphone can easily be attached to the handlebars.
“If I then had some kind of display, like some kind of map, that I could then see all the moving road users, in this case cars and bicycles, at a not well visible intersection. For example, if I’m approaching an intersection […] and I see it on my [.] display or something […]. You already have your mobile phone attached to the handlebars for navigation or something, and the cars can be integrated […].” (D-w-29)
“Or that you can see which car does not have the information that I’m coming or that the system does not have it or where it’s broken or faulty. Then I might see red dots and green dots [on the display] and I do not have to be afraid of the green ones and I have to pay more attention to the red ones.” (A-w-30)
The focus group discussants did not share clear preferences regarding eHMI design on the AV. However, an anthropomorphic design of the AV and eHMI on the vehicle, for example, by simulating a face on the front part of the AV with large eyes, was perceived as negative. Receiving clear information (e.g., via text on a display) was also stated as an acceptable option, without having to interact with the vehicle for further instructions.
“[…] I find it a bit creepy when I am surrounded by 1,000 cars that have eyes of some kind and are following me.” (D-w-61)
“But that’s what it says on the Nissan example, it says “After you,” if I read it right. That’s good information. I do not feel like rolling my eyes back and forth with the car.” (N-31)
Visualised information and messages should be designed in a way that is intuitively comprehensible and based on signals and designs bicyclists and other road users are already familiar with (e.g., traffic light colours).
“A green light or a red light, things like that that are agreed on, of a technical nature, I find better than seeing emojis on the cars now.” (M-27)
“I can also imagine visual signals in principle, for example a green light or something like the traffic light, which is a message that I think is clear to most people.” (D-w-65)
The interaction of bicyclists and AVs is an important topic and bicyclists’ needs are to be taken into account in order for AVs to be accepted in traffic. Especially with SAE Level 4 and 5, when no involvement of the human driver in the car is required, the interaction with bicyclists will be quite different compared to the traffic of today. For this, it is important to know what factors will influence bicyclists’ attitudes towards AVs, but also how to support them in a safe interaction with AVs, for example, with eHMIs. In our mixed method study, we picked up on existing results and explored bicyclists’ trust in and perceived safety of AVs and their relation to other factors, as well as the possibility of eHMIs to foster interaction between bicyclists and AVs. For this, we used quantitative results from a survey first and then explored certain aspects in a focus group.
Our study found that gender and age are predictors for both trust and perceived safety regarding AVs, with increasing age leading to less trust and perceived safety and men having higher levels of both trust and perceived safety. This relates to other findings from survey studies, like the results from Pyrialakou et al. (2020), also observing a gender difference, and Pammer et al. (2021) showing that younger bicyclists would trust an AV more. As trust and perceived safety are decisive factors in the adoption and acceptance of AVs (Kyriakidis et al., 2015; Hulse et al., 2018; Molnar et al., 2018; Panagiotopoulos and Dimitrakopoulos, 2018; Stegmüller et al., 2019; Howard and Dai, 2020; Luger-Bazinger et al., 2021), the results further strengthen the need to include bicyclists and their requirements in the development of such emerging technologies.
Affinity for technology was also a significant predictor for both trust and perceived safety, with higher affinity for technology leading to higher values in the dependent variables. This element was not previously explored and can be considered as a strong factor in influencing the trust and perceived safety as well as acceptance of AVs in future studies.
In the survey, we also showed that bicyclists want to know what an AV is going to do next if they encounter it in traffic, and, albeit to a lesser degree, whether a vehicle they encounter is self-driving or not. The latter aspect showed a gender difference, with women showing a greater want to know about the status of the vehicle than men. As gender is also a significant predictor of trust and perceived safety, this seems to show another aspect of scepticism towards AVs from female participants. Both from the quantitative and qualitative results, it became very clear that flawless functioning of the technology of AVs is a prerequisite for bicyclists encountering and interacting with AVs in traffic, and that the status of the vehicle (autonomous vs. non-autonomous) is very important to bicyclists. The status of a vehicle as well as the next manoeuvre is a chance for messaging via eHMIs to ensure safety of bicyclists.
Concerns about technology issues contribute to the negative perception towards self-driving cars (Rahman et al., 2021) and bicyclists wish for a reliable technology and the adherence of traffic rules when it comes to sharing the road with AVs, as it was clear from both the quantitative and qualitative data. In the absence of human interaction, it is important that the communication between AVs and bicyclists can be ensured by other means for increasing safety. This includes signals that the car has detected the bicyclist and his intentions, as well as information about the car’s intentions. Regarding the possibility to interact with eHMI, the participants underlined that such possibilities should not exclude bicyclists or group of bicyclists and should consider tools and technologies that are already available, such as smartphones which might be already used for other purposes, like navigation. Our participants were also open to the options of warnings in case of potentially dangerous situations for bicyclists. However, bicycling as an easily accessible and simple way of mobility should not be overshadowed by the necessary use of eHMI in the future. The possibility to use anthropomorphic features on the AV itself (e.g., eyes) was received with scepticism in our study, despite previous research indicating that anthropomorphizing features of AVs might help with trust (Niu et al., 2018). Overall, it is noteworthy that the participants were invited into the focus group because of their generally higher affinity for technology, and yet they still had reservations about such options to interact with AVs.
Future studies should investigate user acceptance of on-bike HMIs among bicyclists on a larger scale to test the findings’ generalisability, and explore other, perhaps more viable solutions than on-bike HMIs for enhancing AV-cyclist interaction (Dey et al., 2021; Berge et al., 2022). As the group of VRUs typically includes other road users as well, such as powered two-wheeler riders and pedestrians (Schrauth et al., 2021), some of our results might be transferable to these groups as well. However, pedestrians do not share the road with cars as much as bicyclists do, so the more comparable group is the powered two-wheeler riders. Future studies could further investigate our findings for a more diverse group of VRUs. In addition, also for further research on bicyclists, researchers might want to consider including additional variables in surveys that we did not consider, for example, experience with AVs (similar to the study by Penmetsa et al., 2019). As the overall explained variance of our regression model was small, it can be assumed that variables beyond ATI and sociodemographic variables have an influence on attitudes towards AVs.
To conclude, in our mixed method approach, we have shown how perceptions of AVs (especially trust and perceived safety) are influenced by bicyclists’ age, gender and affinity for technology. Further, we have observed that bicyclists wish for flawless technical functioning, clear status of the AV and easy to understand signals of the next manoeuvre of the AV. For supporting the interaction of bicyclists and AVs, we found that bicyclists are open to eHMI solutions to increase safety that ensure inclusion of various groups of bicyclists, while still preserving the easily-accessible and not technology overloaded nature of bicycling.
In communication about AVs in traffic, policymakers, cities, traffic planners and manufacturers of AVs need to be aware that people’s trust in and perceived safety of AVs also depends on factors like age, gender and technological affinity of bicyclists’ and need to plan communication and actions accordingly to different groups to reduce scepticism in the population. Our findings can inform the design of eHMIs that help shape the interaction between bicyclists and AVs in the future, for example, by clearly communicating the status and next manoeuvre of an AV to a bicyclist in a way that is easily perceivable to a diverse group of bicyclists.
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Ethical approval was not required for the studies involving humans because particpants gave their informed consent to participation in the survey/focus groups after detailed explanation on the study content, which involved solely attitudes and habits that were analyzed anonymously. The studies were conducted in accordance with the local legislation and institutional requirements. The participants provided their written informed consent to participate in this study.
CL-B: Design and analysis of quantitative survey data, writing and revision of manuscript. EH: Design and moderation of focus group, analysis of qualitative results, writing and revision of manuscript. HA: Design and moderation of focus group, feedback on survey design, revision of manuscript. CZ: Design and moderation of focus group, feedback on survey. VH-P: Feedback on design of survey and focus groups, moderation of focus group, revision of manuscript. All authors contributed to the article and approved the submitted version.
The research leading to these results has received funding from the Mobility of the Future programme (project Bike2CAV). Mobility of the Future is a research, technology and innovation funding programme of the Republic of Austria, Ministry of Climate Action. The Austrian Research Promotion Agency (FFG) has been authorised for the programme management.
CL-B, EH, CZ, and VH-P were employed by the Salzburg Research Forschungsgesellschaft mbH.
The remaining author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/ffutr.2023.1174956/full#supplementary-material
Agresti, A. (2007). An introduction to categorical data analysis. Hoboken: John Wiley and Sons. doi:10.1002/0470114754
Bakalos, N., Papadakis, N., and Litke, A. (2020). Public perception of autonomous mobility using ML-based sentiment analysis over social media data. Logist, Vol. 4, 12. doi:10.3390/LOGISTICS4020012
Bartneck, C., Kanda, T., Mubin, O., and Al Mahmud, A. (2009). Does the design of a robot influence its animacy and perceived intelligence? Int. J. Soc. Robot. 1, 195–204. doi:10.1007/S12369-009-0013-7
Bazilinskyy, P., Kyriakidis, M., and de Winter, J. (2015). An international crowdsourcing study into people’s statements on fully automated driving. Procedia Manuf. 3, 2534–2542. doi:10.1016/J.PROMFG.2015.07.540
Berge, S. H., Hagenzieker, M., Farah, H., and de Winter, J. (2022). Do cyclists need HMIs in future automated traffic? An interview study. Transp. Res. Part F. Traffic Psychol. Behav. 84, 33–52. doi:10.1016/j.trf.2021.11.013
Bloor, M., Frankland, J., Thomas, M., and Robson, K. (2001). Focus groups in social research. London: SAGE Publications Ltd. doi:10.4135/9781849209175
Botello, B., Buehler, R., Hankey, S., Mondschein, A., and Jiang, Z. (2019). Planning for walking and cycling in an autonomous-vehicle future. Transp. Res. Interdiscip. Perspect. 1, 100012. doi:10.1016/J.TRIP.2019.100012
Breitenfelder, U., Hofinger, C., Kaupa, I., and Picker, R. (2004). The use of focus groups in the process of political research and consultancy. Forum Qual. sozialforsch./Forum Qual. Soc. Res. 5. doi:10.17169/FQS-5.2.591
Creswell, J. W. (2003). Research design: Qualitative, quantitative, and mixed methods approaches. Thousand Oaks, CA: Sage.
Davis, F. D. (1989). Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Q. Manag. Inf. Syst. 13, 319–339. doi:10.2307/249008
Dey, D., Matviienko, A., Berger, M., Pfleging, B., Martens, M., and Terken, J. (2021). Communicating the intention of an automated vehicle to pedestrians: The contributions of eHMI and vehicle behavior. contributions eHMI Veh. Behav. 63, 123–141. doi:10.1515/itit-2020-0025
Eden, G., Nanchen, B., Ramseyer, R., and Evéquoz, F. (2017). Expectation and experience: Passenger acceptance of autonomous public transportation vehicles. Lect. Notes Comput. Sci. Incl. Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinforma. 10516 LNCS, 360–363. doi:10.1007/978-3-319-68059-0_30
European Environment Agency (2018). Greenhouse gas emissions from transport in Europe. Available at: https://www.eea.europa.eu/data-and-maps/indicators/transport-emissions-of-greenhouse-gases-7.
Fraedrich, E., Beiker, S., and Lenz, B. (2015). Transition pathways to fully automated driving and its implications for the sociotechnical system of automobility. Eur. J. Futur. Res. 31 3, 11. doi:10.1007/S40309-015-0067-8
Franke, T., Attig, C., and Wessel, D. (2018). A personal resource for technology interaction: Development and validation of the affinity for technology interaction (ATI) scale. Int. J. Human–Computer Interact. 35, 1. doi:10.1080/10447318.2018.145615035
Goeman, J. J., and Jong, N. H. De (2018). How well does the sum score summarize the test? Summability as a measure of internal consistency. Educ. Meas. Issues Pract. 37, 54–63. doi:10.1111/EMIP.12181
Grigoropoulos, G., Khabibulin, N., Keler, A., Malcolm, P., and Bogenberger, K. (2021). Detection and classification of bicyclist group behavior for automated vehicle applications. IEEE Conf. Intell. Transp. Syst. Proc. ITSC 2021-September, 1883–1889. doi:10.1109/ITSC48978.2021.9564548
Haboucha, C. J., Ishaq, R., and Shiftan, Y. (2017). User preferences regarding autonomous vehicles. Transp. Res. Part C Emerg. Technol. 78, 37–49. doi:10.1016/J.TRC.2017.01.010
Haeuslschmid, R., Von Buelow, M., Pfleging, B., and Butz, A. (2017). Supporting trust in autonomous driving. Int. Conf. Intell. User Interfaces, Proc. IUI, 319–329. doi:10.1145/3025171.3025198
Hagenzieker, M. P., van der Kint, S., Vissers, L., van Schagen, I. N. L. G., de Bruin, J., van Gent, P., et al. (2019). Interactions between cyclists and automated vehicles: Results of a photo experiment. J. Transp. Saf. Secur, 12, 1. doi:10.1080/19439962.2019.159155612,94–115
Hewitt, C., Amanatidis, T., Politis, I., and Sarkar, A. (2019). Assessing public perception of self-driving cars: The autonomous vehicle acceptance model. Int. Conf. Intell. User Interfaces, Proc. IUI Part F1476, 518–527. doi:10.1145/3301275.3302268
Hilgarter, K., and Granig, P. (2020). Public perception of autonomous vehicles: A qualitative study based on interviews after riding an autonomous shuttle. Transp. Res. Part F. Traffic Psychol. Behav. 72, 226–243. doi:10.1016/J.TRF.2020.05.012
Hohenberger, C., Spörrle, M., and Welpe, I. M. (2016). How and why do men and women differ in their willingness to use automated cars? The influence of emotions across different age groups. Transp. Res. Part A Policy Pract. 94, 374–385. doi:10.1016/J.TRA.2016.09.022
Howard, D., and Dai, D. (2020). Public perceptions of self-driving cars: The case of berkeley, California. Washington, Transp. Res. Board 93rd Annu. Meet., 226–243. Available at: file:///C:/Users/haster/AppData/Local/Mendeley Ltd./Mendeley Desktop/Downloaded/Unknown - Unknown - Public Perceptions of Self-driving Cars.pdf.
Hulse, L. M., Xie, H., and Galea, E. R. (2018). Perceptions of autonomous vehicles: Relationships with road users, risk, gender and age. Saf. Sci. 102, 1–13. doi:10.1016/J.SSCI.2017.10.001
Kaß, C., Schoch, S., Naujoks, F., Hergeth, S., Keinath, A., and Neukum, A. (2020). “A methodological approach to determine the benefits of external hmi during interactions between cyclists and automated vehicles: A bicycle simulator study,” in CI in mobility, transport, and automotive systems. Driving behavior, urban and smart mobility. Editor H. Krömker (Cham: Springer), 211–227. doi:10.1007/978-3-030-50537-0_16
Koul, S., Eydgahi, A., Koul, S., and Eydgahi, A. (2018). Utilizing technology acceptance model (TAM) for driverless car technology adoption. J. Technol. Manag. Innov. 13, 37–46. doi:10.4067/S0718-27242018000400037
Kyriakidis, M., Happee, R., and De Winter, J. C. F. (2015). Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transp. Res. Part F. Traffic Psychol. Behav. 32, 127–140. doi:10.1016/J.TRF.2015.04.014
Lee, J.-G., Kim, K. J., Lee, S., and Shin, D.-H. (2015). Can autonomous vehicles Be safe and trustworthy? Effects of appearance and autonomy of unmanned driving systems. Int. J. Hum. Comput. Interact. 31, 682–691. doi:10.1080/10447318.2015.1070547
Li, X., Li, L., Flohr, F., Wang, J., Xiong, H., Bernhard, M., et al. (2017). A unified framework for concurrent pedestrian and cyclist detection. IEEE Trans. Intell. Transp. Syst. 18, 269–281. doi:10.1109/TITS.2016.2567418
Li, Y., Cheng, H., Zeng, Z., Liu, H., and Sester, M. (2021). Autonomous vehicles drive into shared spaces: eHMI design concept focusing on vulnerable road users. IEEE Conf. Intell. Transp. Syst. Proc. ITSC 2021-September 31, 1729–1730. doi:10.1007/s40670-021-01405-9
Luger-Bazinger, C., Zankl, C., Klieber, K., Hornung-Prähauser, V., and Rehrl, K. (2021). Factors influencing and contributing to perceived safety of passengers during driverless shuttle rides. Futur. Transp. 2021, Pages 657–671. doi:10.3390/FUTURETRANSP1030035
Madigan, R., Louw, T., Wilbrink, M., Schieben, A., and Merat, N. (2017). What influences the decision to use automated public transport? Using UTAUT to understand public acceptance of automated road transport systems. Transp. Res. Part F. Traffic Psychol. Behav. 50, 55–64. doi:10.1016/J.TRF.2017.07.007
Merat, N., Louw, T., Madigan, R., Wilbrink, M., and Schieben, A. (2018). What externally presented information do VRUs require when interacting with fully Automated Road Transport Systems in shared space? Accid. Anal. Prev. 118, 244–252. doi:10.1016/J.AAP.2018.03.018
Mitteregger, M., Bruck, E. M., Soteropoulos, A., Stickler, A., Berger, M., Dangschat, J. S., et al. (2020). “AVENUE 21. Automatisierter und vernetzter Verkehr,” in Daimler und Benz Stiftung (germany: Springer Berlin Heidelberg). doi:10.1007/978-3-662-61283-5_1
Molnar, L. J., Ryan, L. H., Pradhan, A. K., Eby, D. W., Louis, St.R. M., and Zakrajsek, J. S. (2018). Understanding trust and acceptance of automated vehicles: An exploratory simulator study of transfer of control between automated and manual driving. Transp. Res. Part F. Traffic Psychol. Behav. 58, 319–328. doi:10.1016/J.TRF.2018.06.004
Niu, D., Terken, J., and Eggen, B. (2018). Anthropomorphizing information to enhance trust in autonomous vehicles. Hum. Factors Ergon. Manuf. Serv. Ind. 28, 352–359. doi:10.1002/HFM.20745
Nordhoff, S., de Winter, J., Madigan, R., Merat, N., van Arem, B., and Happee, R. (2018). User acceptance of automated shuttles in berlin-schöneberg: A questionnaire study. Transp. Res. Part F. Traffic Psychol. Behav. 58, 843–854. doi:10.1016/J.TRF.2018.06.024
Nordhoff, S., Kyriakidis, M., van Arem, B., and Happee, R. (2019). A multi-level model on automated vehicle acceptance (MAVA): A review-based study. Theor. Issues Ergon. Sci. 20, 682–710. doi:10.1080/1463922X.2019.1621406
Pammer, K., Gauld, C., McKerral, A., and Reeves, C. (2021). They have to be better than human drivers! Motorcyclists’ and cyclists’ perceptions of autonomous vehicles. Transp. Res. Part F. Traffic Psychol. Behav. 78, 246–258. doi:10.1016/J.TRF.2021.02.009
Panagiotopoulos, I., and Dimitrakopoulos, G. (2018). An empirical investigation on consumers’ intentions towards autonomous driving. Transp. Res. Part C Emerg. Technol. 95, 773–784. doi:10.1016/J.TRC.2018.08.013
Parasuraman, R., and Riley, V. (2016). Humans and automation: Use, misuse, disuse, abuse. Hum. Factors 39, 230–253. doi:10.1518/001872097778543886
Payre, W., Cestac, J., and Delhomme, P. (2014). Intention to use a fully automated car: Attitudes and a priori acceptability. Transp. Res. Part F. Traffic Psychol. Behav. 27, 252–263. doi:10.1016/J.TRF.2014.04.009
Penmetsa, P., Adanu, E. K., Wood, D., Wang, T., and Jones, S. L. (2019). Perceptions and expectations of autonomous vehicles – a snapshot of vulnerable road user opinion. Technol. Forecast. Soc. Change 143, 9–13. doi:10.1016/J.TECHFORE.2019.02.010
Pettigrew, S., Nelson, J. D., and Norman, R. (2020). Autonomous vehicles and cycling: Policy implications and management issues. Transp. Res. Interdiscip. Perspect. 7, 100188. doi:10.1016/J.TRIP.2020.100188
Pyrialakou, V. D., Gkartzonikas, C., Gatlin, J. D., and Gkritza, K. (2020). Perceptions of safety on a shared road: Driving, cycling, or walking near an autonomous vehicle. J. Saf. Res. 72, 249–258. doi:10.1016/J.JSR.2019.12.017
Rahman, M. T., Dey, K., Das, S., and Sherfinski, M. (2021). Sharing the road with autonomous vehicles: A qualitative analysis of the perceptions of pedestrians and bicyclists. Transp. Res. Part F. Traffic Psychol. Behav. 78, 433–445. doi:10.1016/J.TRF.2021.03.008
Rice, S., and Winter, S. R. (2019). Do gender and age affect willingness to ride in driverless vehicles: If so, then why? Technol. Soc. 58, 101145–145. doi:10.1016/J.TECHSOC.2019.101145
SAE (2018). Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles - SAE international. Available at: https://www.sae.org/standards/content/j3016_201806/.
Salonen, A. O. (2018). Passenger’s subjective traffic safety, in-vehicle security and emergency management in the driverless shuttle bus in Finland. Transp. Policy 61, 106–110. doi:10.1016/J.TRANPOL.2017.10.011
Schrauth, B., Funk, W., Maier, S., and Kraetsch, C. (2021). The acceptance of conditionally automated cars from the perspective of different road user groups. Eur. J. Transp. Infrastruct. Res. 21, 81–103. doi:10.18757/EJTIR.2021.21.4.5466
Stegmüller, S., Werner, M., and Kern, M. (2019). Akzeptanzstudie “Robocab”. Autonome Mobilitätskonzepte aus Sicht der Nutzer. Available at: http://publica.fraunhofer.de/documents/N-531897.html.
Tabone, W., de Winter, J., Ackermann, C., Bärgman, J., Baumann, M., Deb, S., et al. (2021). Vulnerable road users and the coming wave of automated vehicles: Expert perspectives. Transp. Res. Interdiscip. Perspect. 9, 100293. doi:10.1016/J.TRIP.2020.100293
Keywords: autonomous vehicles, bicyclists, vulnerable road users, affinity for technology, mixed methods, perceived safety
Citation: Luger-Bazinger C, Hollauf E, Atasayar H, Zankl C and Hornung-Prähauser V (2023) Perceptions and attitudes of bicyclists towards self-driving cars: a mixed methods approach. Front. Future Transp. 4:1174956. doi: 10.3389/ffutr.2023.1174956
Received: 27 February 2023; Accepted: 02 August 2023;
Published: 21 August 2023.
Edited by:
Mehrdad Dianati, University of Warwick, United KingdomReviewed by:
Sebastian Will, Würzburg Institute for Traffic Sciences GmbH, GermanyCopyright © 2023 Luger-Bazinger, Hollauf, Atasayar, Zankl and Hornung-Prähauser. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Claudia Luger-Bazinger, Y2xhdWRpYS5sdWdlci1iYXppbmdlckBzYWx6YnVyZ3Jlc2VhcmNoLmF0
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.