 Shengbo Sun1
Shengbo Sun1 Zhenbing Zhao
Zhenbing Zhao- 1State Grid Hebei Marketing Service Center, Shijiazhuang, Hebei, China
- 2North China Electric Power University, Baoding, Hebei, China
Energy conservation, emission reduction and vigorous development of new energy are inevitable trends in the development of the power industry, but factors such as energy storage loss, solar energy loss and line loss in real power situations have led the problem to a complex direction. To address these intricacies, we use a more precise modeling approach of power loss and propose a collaborative optimization method integrating the Deep-Q-Network (DQN) algorithm with the multi-head attention mechanism. This algorithm calculates weighted features of the system’s states to compute the Q-values and priorities for determining the next operational directives of the energy system. Through extensive simulations that replicate real world microgrid (MG) scenarios, our investigation substantiates that the optimization methodology presented here effectively governs the distribution of energy resources. It accomplishes this while accommodating uncertainty-induced losses, ultimately achieving the economic optimization of MG. This research provides a new approach to deal with problems such as energy loss, which is expected to improve economic efficiency and sustainability in areas such as microgrids.
1 Introduction
1.1 Background and related works
With the exacerbating energy crisis and environmental pollution, solar and wind energy have played an increasingly vital role as distributed energy resources due to their abundant and pollution-free nature. However, solar and wind energy are random and intermittent, posing difficulties for grid integration and dispatch. Microgrids have emerged as an effective solution to facilitate the comprehensive utilization of renewable energy (Zhang and Kang, 2022). Microgrids show enormous potential in resolving renewable energy integration thanks to their flexible operation and ease of control. Their efficient and cost-effective operation is a prerequisite for sustainable development. Nevertheless, the multi-source characteristic of renewable energy sources introduces complexity to the control problem in microgrid systems. Based on recent surveys, it has been observed that as much as 13% of the total generated power is dissipated as losses at the distribution level (Wu et al., 2010; Patel and Patel, 2016) applied ant colony optimization (ACO) to the reconfiguration of microgrids with distributed generation (DG) in order to minimize power losses (Kumari et al., 2017). introduced a particle swarm optimization (PSO) approach aimed at reducing DG costs and enhancing the voltage profile while addressing power loss concerns. Both of the aforementioned methods ascertain the optimal placement of DG using optimization algorithms. However, they do not account for the distinction between linear and nonlinear loads in their calculations. On the basis of this problem, this paper proposes a more accurate model of the actual line loss.
Energy system scheduling for microgrids has been investigated in a number of previous studies. Numerous studies utilize model-based control paradigms, including model predictive control (MPC) (Gan et al., 2020), mixed-integer linear programming (MILP) (Paterakis et al., 2015), dynamic and stochastic programming (Farzaneh et al., 2019), and alternating direction method of multiplier (ADMM) (Ma et al., 2018). However, once a large number of DERs connected to the MG in a disorderly way, the operation of the power grid will be largely influenced by its randomness and uncertainty. This makes it difficult to obtain the accurate system model. To solve these challenges, a model-free technique using reinforcement learning (RL) has been proven beneficial for energy system scheduling since the model of the environment is not necessary in this method. It is now emerging as the pre-eminent tool for unknown environmental decision-making issues. The authors of (Kim et al., 2016) present an RL algorithm that enables service providers and customers to acquire pricing and energy consumption strategies without any prior knowledge, thus reducing system costs (Fang et al., 2020). explored a dynamic RL-based pricing scheme to attain optimal prices when dealing with fast-charging electric vehicles connected to the grid. To reduce the electricity bills of residential consumers, a model for load scheduling using RL was developed in the literature (Lee and Choi, 2022), where the residential load includes dispatches-available load, non-dispatches-available load, and local PV generation. In recent research findings, to address the dynamically changing operational conditions of appliances, a federated DQN approach has been proposed for managing energy in multiple homes (Remani et al., 2019). This research showcased exceptional performance of the DQN method in ad-dressing continuous state space energy management challenges. Nevertheless, in MG scenarios, the performance of the DQN model in energy scheduling is significantly compromised by the inherent uncertainty of renewable energy sources. Furthermore, there is currently no well-defined strategy in place to address the complex issue of multivariate losses.
1.2 Contributions
To overcome the aforementioned challenges, this paper proposes an optimization method for grid-connected MG energy storage scheduling based on the DQN cooperative algorithm, aiming at minimizing the cost of electricity expenses, which is named AP DQN. Specifically, the proposed algorithm combines the multi-headed attention mechanism with the PER mechanism in DQN to improve its performance. In this configuration, the DQN interacts with the environment to obtain Q values and form rewards, and uses prioritized experience replay to stabilize learning. In addition, the algorithm computes the weighted features of the state using the multi-headed attention mechanism, and uses the weighted features to compute the Q-value and priority, which can make the state-action pair information of the terminal closer to the merit-seeking target, thus improving the overall convergence speed of the DQN. The case study verifies the effectiveness of the proposed algorithm for grid-connected MG energy storage scheduling with real-world data. The MPCLP algorithm is subsequently benchmarked against the optimal global solution. The primary contributions of this paper can be summarized as follows:
1. A precise mathematical model encompassing both linear and nonlinear power losses is developed to address the issue of multivariate loss factors in MGs.
2. A game combination optimization scheme based on deep reinforcement learning algorithm DQN is constructed based on the problem of difficult to handle multivariate uncertainties in MGs.
3. The AP DQN algorithm incorporating the multi-head attention mechanism is proposed for the problem of lossy features. Experimental results show that the method greatly improves the exploration efficiency. From the perspective of cost objective, our model outperforms the standard DQN by 33.5% and outperforms the MPCLP-based mechanism by up to 17.74%.
2 Microgrid’s DRL model
2.1 Environment model
The environment model serves as the MG system environment that interacts with the agent. In this project, we considered a MG with internal user loads, a photovoltaic field and an energy storage system (ESS), which is connected to the main grid through only one distribution line. Figure 1 illustrates the conceptual MG model that is envisioned in this study. The MG is managed by an energy management system (EMS), which fully controls all operations of the MG, including the processes of charging and discharging the ESS, as well as the power trading activities between the MG and the main grid. To enhance the stability and ensure the uninterrupted operation of mission-critical activities, it is necessary to monitor the state of the microgrid’s emergency load reserve during main grid outages, called the state of charge (SOC) in the following article. We divide the MG system into 24 time slots and each time slot is denoted as
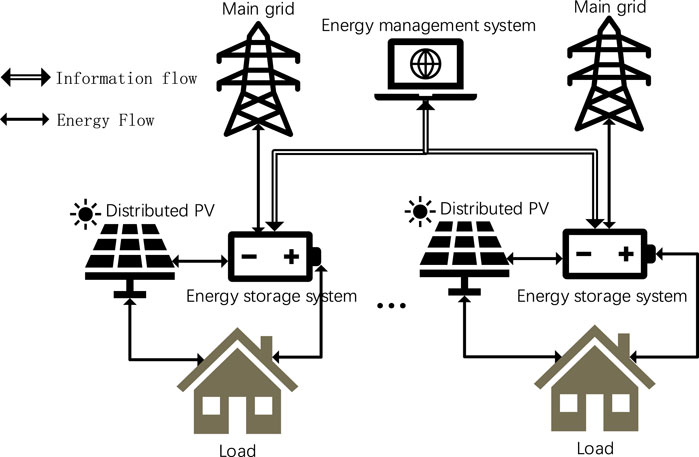
FIGURE 1. MG system structure diagram.
Reinforcement learning can be characterized as a Markov Decision Process (MDP) comprising a state space
2.1.1 ESS model
In this system, ESS mainly performs charging and discharging operations with an action space range of −1 to 1. A positive value represents charging, while a negative value indicates discharging. We define
where parameters
where parameters
2.1.2 PV model
The DC power generated by the PV module undergoes filtering in the DC circuit to eliminate current fluctuations and electromagnetic interference. It is then converted into AC power in the inverter circuit. The resulting AC power is rectified to obtain sinusoidal AC power. Subsequently, the output-side filter circuit is employed to mitigate high-frequency interference signals generated during the inverting process. This enables integration into the grid or direct supply to the load. The losses incurred during these transformations can be mathematically expressed as follows:
where parameters
2.2 Real power loss of loads
Given the diverse characteristics of loads and their varying operational conditions, we adopt distinct methods for evaluating power losses. In the case of linear loads, we calculate losses by subtracting the output power from the input power to achieve greater accuracy. For nonlinear loads, we consider power factor adjustments to account for the influence of factors such as harmonics and phase differences. The expression for real power loss in the load is as follows:
where parameters
2.3 Objective function and constrains designs
To keep the energy trading decisions of the MG within a reasonable range, we specify that the ESS must reserve enough energy for the critical tasks, named the target SOC, to minimize the MG operation cost under this constraint. The constraint functions are as follows:
With such a constraint, the system is able to reserve enough emergency power for the MG in the case of an accident scenario. In addition, the objective function of the optimization is described as follows:
where
3 Materials and methods
First, this paper designs a more accurate mathematical model of multivariate loss factors for microgrids with respect to loss uncertainty as well as ambiguity. Then, based on the problem of loss feature diversity, an optimization scheme of deep reinforcement learning algorithm DQN combined with multi-attention mechanism is proposed, which utilizes the principle of attention to process loss data of different sizes more efficiently, and ultimately derives the optimal scheduling actions of the energy management system for microgrids according to the objective of economic optimization.
3.1 Heading baseline-DQN
The issue examined in this paper pertains to a high-dimensional uncertainty problem that is not amenable to traditional algorithmic solutions. Reinforcement learning is a frontier area of machine learning and is a hot topic in the field of intelligent systems research. Reinforcement learning distinguishes itself from supervised learning in terms of the availability of training labels or targets. In supervised learning, the correct labels are provided to train the model. In contrast, reinforcement learning operates without explicit targets and adopts a trial-and-error approach. The model learns from its past mistakes to iteratively enhance its decision-making abilities for future actions (Mnih et al., 2013).
In the traditional approach to solving the reinforcement learning problem, a Q-table is constructed to store the Q-values, which represent the expected rewards of taking specific actions in particular states. The Q-table is updated utilizing an iterative updating rule that takes into account the recursive relationship between the Q-values. Nevertheless, when a continuous state space is encountered, it becomes impractical to create a state-action table to record every possible combination of states and actions. To overcome the limitation, a neural network known as the DQN is employed. The DQN takes the states as inputs and generates the Q-values for each possible action as outputs, which is trained through the trial-and-error process (Mnih et al., 2013). The Q-values are subsequently updated using the Bellman equation as follows:
where
3.2 AP DQN method
In this section, we design the AP DQN method. There are two main modules in this algorithm, one of them is a learning network model based on PER DQN, and the other is a relational network model that includes the multi-head attention mechanism. The multi-head attention mechanism in our work is applied to focus on relevant samples in the experience replay process as well as the Q-value handling process. The innovations of this algorithm are mainly represented in the following: the multi-head attention mechanism is adopted to enable the network to process the input sequences in parallel, and the model is able to realize the information fusion and sharing so as to enhance the learning ability; the network structure is improved comprehensively, and the addition of the relational model layer to weight the Q-value provides stronger adaptive learning flexibility for the network weights. The algorithm operation process diagram is shown in Figure 2. In this certain case, we put the mathematical models of ESS and PV and constraints of devices in the environment module.
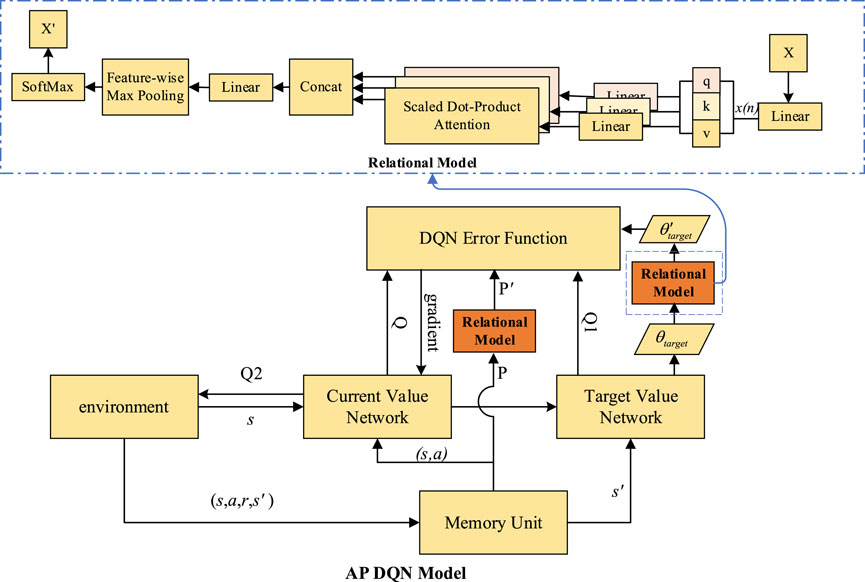
FIGURE 2. Algorithm operation process diagram.
Where Q indicates
We use a multi-headed attention mechanism in experience replay memories. This allows for the selection of experience replay samples by using the multi-headed attention mechanism to focus on all past samples in the memory pool and select those that are most important and relevant for the current learning. At the same time, the multi-headed attention mechanism is used in the calculation of Q values. When calculating
3.2.1 Algorithmic framework
In this section we design the algorithm framework, the operation process is as follows:
1. First, we initialize the playback memory unit, the priority weights array
2. We capture the experience tuple
3. For each experience tuple
(a). Calculate attention headers with number of K:
where
(b). Fuse the attention header to obtain the final attention value
(c). Calculate the weighted characteristics:
4. Calculate the priority
5. Select the experience tuple with the number of batch size for learning by priority.
(a). Calculate the Q value for each experience using the Q network and the weighted state
(b). Calculate the loss of each experience using the Q target:
(c). Gradient descent updates the Q-network parameters
6. Update the priority array
7. Repeat steps 2-6 for training.
3.2.2 Reward function design
A segmented reward function is designed to guide the trading strategy provided that all conditions are satisfied, where the reward value depends on:
1. The state difference from the target SOC.
2. The final cost obtained from the MG operation.
Below the target SOC, it is imperative to prioritize charging the ESS promptly, irrespective of the price. Similarly, the price must be high enough to discharge the ESS below the target SOC. Therefore, the charging and discharging criteria for the ESS differ depending on whether the SOC is below or above the target level. To optimize the utilization of the remaining storage capacity, the charging price for the ESS should decrease as the state of charge (SOC) approaches full SOC. This incentivizes efficient charging when there is ample capacity available. Conversely, the price for discharging the ESS should be higher when the SOC is closer to the target SOC. This approach encourages the effective utilization of the remaining available energy and ensures that the SOC is maintained at the desired level. In addition to this setting, two penalty factors are introduced to have further control of the ESS operational behavior. The first penalty term
where
3.2.3 Relational model
The main idea of the relational model is the weighted encoding of states using a multi-headed attention mechanism. The attention mechanism can be understood as a process of addressing information, where the attention value is computed by calculating the attention distribution based on the key and associating it with the value. This computation is performed with respect to a task-specific query vector Q, allowing the attention mechanism to focus on relevant information and selectively combine it with the query. By dividing each query, key, and value into multiple branches, multiple different attention calculations are performed on Q, K, and V to obtain multiple different outputs, and then these different outputs are stitched together to obtain the final output. Indeed, this process represents the essence of attention, which helps mitigate the complexity of neural networks. Instead of feeding all N inputs into the network for computation, attention selectively chooses task-relevant information to be inputted. This approach is similar to the concept of gating mechanisms in Recurrent Neural Networks (RNNs), where the network learns to focus on relevant information and effectively allocate computational resources (Azam and Younis, 2021).
Due to the priority sampling strategy, PER introduces a bias towards selecting higher priority samples during training (Schaul et al., 2015). This bias has the potential to lead to overfitting of the results obtained by the DQN algorithm. Therefore, to correct for bias, we introduce the relational model to adjust the sampling weights. The built-in attention mechanism allows direct monitoring of the training process by highlighting the areas that agents focus on when making decisions. It naturally incorporates the policy gradient algorithm in reinforcement learning, where each time-step attention mechanism samples from
where
4 Experiments and results
In this section, we present simulation results to demonstrate the effectiveness of the proposed algorithm. These results serve as empirical evidence supporting the performance and efficacy of the algorithm. Specifically, the DQN architecture employed in this study consists of one input layer with four neurons, three fully connected hidden layers with 40 and 80 neurons, and one output layer with 14 neurons. This configuration allows for effective learning and decision-making within the energy management algorithm.

TABLE 1. Hyper-parameters.
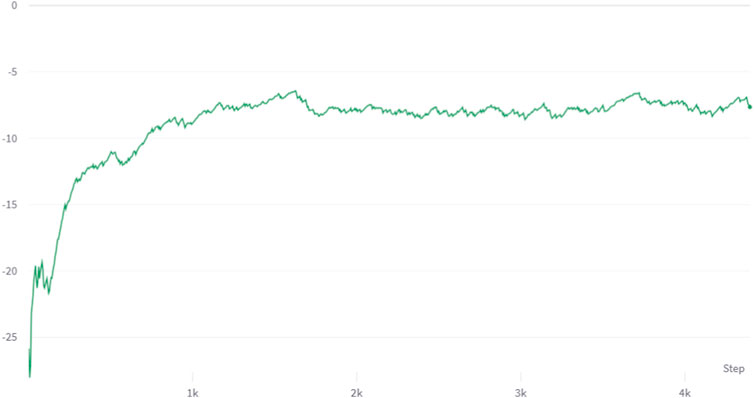
FIGURE 3. Mean episode reward with AP DQN (smoothing 0.8).
Due to the large range of resultant data, we chose the average MG scheduling results over a time horizon of 24 h as a demonstration of the scheduling strategy, and the result with AP DQN is shown in Figure 4. Due to the large time horizon involved in the dataset, the obtained ESS scheduling strategy is measured in terms of the final economic cost and the percentage of the system working within the constraints. We used a model predictive control linear programming (MPCLP) based algorithm (Matute et al., 2018) for comparison and performed ablation experiments. MPCLP is a linear programming optimization method, which commonly employs an optimization software to work out the problem. It provides good optimization accuracy while satisfying the assumptions of a linear dynamic system. Among them, MPCLP uses two prediction models, LSTM and Seq2Seq, respectively. The results of the ablation experiments are shown in Figure 5. The results of the comparison experiments are shown in Figure 6.

FIGURE 4. 24-h average MG scheduling partial result with AP DQN.
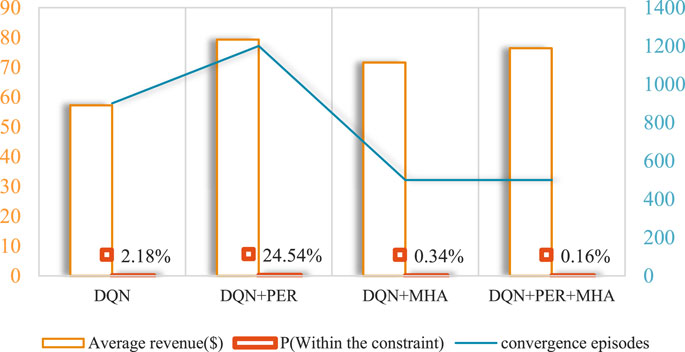
FIGURE 5. Results of ablation experiments.
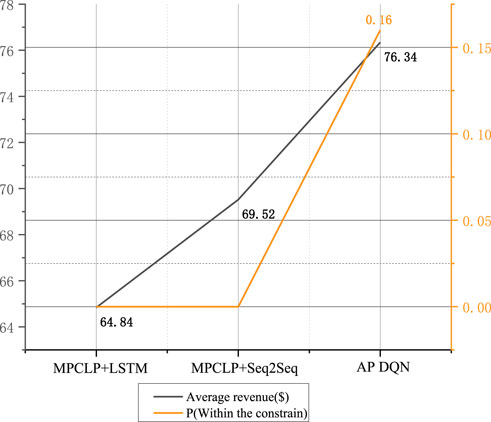
FIGURE 6. Results of comparison experiments.
As seen in Figure 4, Positive values of action in the figure indicate charging, negative values indicate discharging, and SOC ranges from 0 to 1. It can be concluded that the EMS will combine the state of the SOC at the moment with the floating tariff to give the best possible action within the constrains.
As seen in Figure 5, the base DQN has poor performance in the ablation experiment, but the average gain rises significantly with the addition of PER, however, this is a result of large-scale constraint violations. With the addition of the multi-head attention mechanism, the algorithm is able to obtain an average return close to the PER DQN while maintaining a certain range of constraints. After adding the multi-headed attention mechanism to DNQ together with PER, the result of maximizing the average gain and minimizing the probability of constraint violation can be obtained.
As seen in Figure 6, AP DQN has the highest average profit in the comparison experiment, but there is a default rate of 0.16%, although this is an acceptable range. The reason for this is that the traditional linear programming approach has a strict adherence to the constraints and therefore a p-value of 0. In contrast, the proposed AP DQN algorithm can violate the constraints driven by the reward values to a minor degree, thus achieving the goal of maximizing the average profit.
The results obtained from the comparative experiments and ablation studies using different models are summarized in Table 2. Comparison and Ablation Results of Different Model. As can be seen from the table that our model outperforms the standard DQN by 33.5%, the MPCLP based mechanism by 17.74% at most. Compared with PER DQN, our model is a better choice in terms of algorithmic efficiency and conditional constraints.
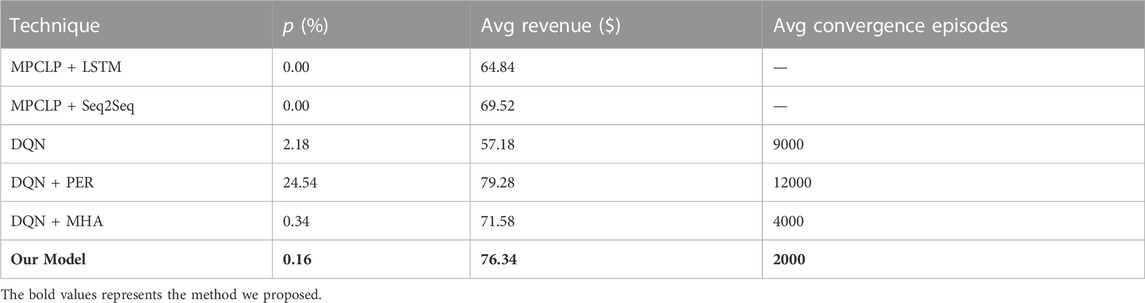
TABLE 2. Comparison and ablation results of different model.
5 Conclusion
In this paper, we propose an AP DQN algorithm. The algorithm not only maximizes monetary benefits but also maintains the reliability of the MG at the same time, being able to maintain sufficient energy reserves for critical operations. The algorithm presented uses a multi-headed attention mechanism as well as a prioritized experience replay mechanism to use current information for optimizing energy trading decisions. The algorithm we propose is a model-free reinforcement learning method, which usually has strong generalization ability. This method learns a wide range of strategies from a large amount of empirical data so that it can make reasonable decisions in uncovered states and can adapt better to various situations and conditions. In comparison with the MPCLP approach, it can be concluded that the reinforcement learning based approach has a higher average monetary benefit in the presence of higher system reliability. It is worth noting that the reward function in RL can be further adjusted and optimized to improve the overall results. Fine-tuning the reward function has a significant impact on the performance of the RL algorithm. Additionally, it is important to consider that value-based RL methods generate discrete trading decisions, whereas MPCLP decisions are continuous in nature. This distinction can affect the comparison of results obtained from the two approaches. In future work, policy-based reinforcement learning is an appropriate direction to be investigated to obtain continuous decisions.
Data availability statement
The data analyzed in this study is subject to the following licenses/restrictions: The dataset in this article is a power industry dataset that cannot be disclosed according to regulations. Requests to access these datasets should be directed to ZZ, emhhb3poZW5iaW5nQG5jZXB1LmVkdS5jbg==.
Author contributions
SS: Conceptualization, Formal Analysis, Investigation, Project administration, Supervision, Writing–original draft. WG: Data curation, Formal Analysis, Methodology, Writing–original draft. QW: Validation, Visualization, Writing–original draft. PT: Investigation, Validation, Writing–review and editing. GL: Formal Analysis, Investigation, Visualization, Writing–review and editing. ZZ: Conceptualization, Data curation, Methodology, Supervision, Writing–original draft.
Funding
The author(s) declare financial support was received for the research, authorship, and/or publication of this article. This research was funded by the S&T Program of Hebei (22284504Z).
Acknowledgments
Heartfelt thanks to everyone who contributed to this paper.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Azam, M. F., and Younis, M. S. (2021). Multi-horizon electricity load and price forecasting using an interpretable multi-head self-attention and EEMD-based framework. IEEE Access 9, 85918–85932. doi:10.1109/ACCESS.2021.3086039
Chen, T., and Su, W. (2018). Local energy trading behavior modeling with deep reinforcement learning. IEEE Access 6 (2), 62806–62814. doi:10.1109/ACCESS.2018.2876652
Fang, C., Lu, H., Hong, Y., Liu, S., and Chang, J. (2020). Dynamic pricing for electric vehicle extreme fast charging. IEEE Trans. Intell. Transp. Syst. 22 (1), 531–541. doi:10.1109/TITS.2020.2983385
Farzaneh, H., Shokri, M., Kebriaei, H., and Aminifar, F. (2019). Robust energy management ofresidential nanogrids via decentralized mean field control. IEEE Trans. Sustain. Energy 11 (3), 1995–2002. doi:10.1109/TSTE.2019.2949016
Gan, L. K., Zhang, P., Lee, J., Osborne, M. A., and Howey, D. A. (2020). Data-driven energy management system with Gaussian process forecasting and mpc for interconnected microgrids. IEEE Trans. Sustain. Energy 12 (1), 695–704. doi:10.1109/TSTE.2020.3017224
Kim, B. G., Zhang, Y., Schaar, M. V., and Lee, J. W. (2016). Dynamic pricing and energy consumption scheduling with reinforcement learning. IEEE Trans. Smart Grid 7 (5), 2187–2198. doi:10.1109/TSG.2015.2495145
Kumari, R. L., Kumar, G. N., Nagaraju, S. S., and Jain, M. B. (2017). “Optimal sizing of distributed generation using particle swarm optimization,” in 2017 International Conference on Intelligent Computing, Instrumentation and Control Technologies, Kerala, India, July, 2017. doi:10.1109/ICICICT1.2017.8342613
Lee, S., and Choi, D. H. (2022). Federated reinforcement learning for energy management of multiple smart homes with distributed energy resources. IEEE Trans. Ind. Inf. 18 (1), 488–497. doi:10.1109/TII.2020.3035451
Ma, W. J., Wang, J., Gupta, V., and Chen, C. (2018). Distributed energy management for networked microgrids using online admm with regret. IEEE Trans. Smart Grid 9 (2), 847–856. doi:10.1109/TSG.2016.2569604
Matute, J. A., Marcano, M., Zubizarreta, A., et al. (2018). “Longitudinal model predictive control with comfortable speed planner,” in IEEE International Conference on Autonomous Robot Systems and Competitions, Torres Vedras, Portugal, April, 2018, 25–27. doi:10.1109/ICARSC.2018.8374161
Mnih, V., Kavukcuoglu, K., Silver, D., et al. (2013). Playing atari with deep reinforcement learning. CoRR. doi:10.48550/arXiv.1312.5602
Moradi, H., Esfahanian, M., Abtahi, A., and Zilouchian, A. (2018). Optimization and energy management of a standalone hybrid micro-grid in the presence of battery storage system. Energy 147, 226–238. doi:10.1016/j.energy.2018.01.016
Patel, A. G., and Patel, C. (2016). “Distribution network reconfiguration for loss reduction,” in 2016 International Conference on Electrical, Electronics, and Optimization Techniques, Chennai, India, March, 2016, 3937–3941. doi:10.1109/ICEEOT.2016.7755453
Paterakis, N. G., Erdinc, O., Bakirtzis, A. G., and Catalao, J. P. S. (2015). Optimal household appliances scheduling under day-ahead pricing and load-shaping demand response strategies. IEEE Trans. Ind. Inf. 11 (6), 1509–1519. doi:10.1109/TII.2015.2438534
Remani, T., Jasmin, E. A., and Ahamed, T. P. I. (2019). Residential load scheduling with renewable generation in the smart grid: a reinforcement learning approach. IEEE Syst. J. 13 (3), 3283–3294. doi:10.1109/JSYST.2018.2855689
Schaul, T., Quan, J., Antonoglou, I., et al. (2015). Prioritized experience replay. CoRR. doi:10.48550/arXiv.1511.05952
Sima, L., Miteva, N., and Dagan, K. J. (2023). A novel approach to power loss calculation for power transformers supplying nonlinear loads. Electr. Power Syst. Res. 223, 109582. doi:10.1016/j.epsr.2023.109582
Wu, Y., Lee, C. Y., Liu, L. C., and Tsai, S. H. (2010). Study of reconfiguration for the distribution system with distributed generators. IEEE Trans. Power Deliv. 25 (3), 1678–1685. doi:10.1109/TPWRD.2010.2046339
Keywords: microgrid, energy management, deep reinforcement learning (deep RL), real power loss, attention mechanism (AM)
Citation: Sun S, Guo W, Wang Q, Tao P, Li G and Zhao Z (2024) Optimal scheduling of microgrids considering real power losses of grid-connected microgrid systems. Front. Energy Res. 11:1324232. doi: 10.3389/fenrg.2023.1324232
Received: 19 October 2023; Accepted: 19 December 2023;
Published: 08 January 2024.
Edited by:
Hengrui Ma, Qinghai University, ChinaReviewed by:
Yixin Liu, Tianjin University, ChinaJun Li, Nanjing Institute of Technology (NJIT), China
Chenhao Sun, Changsha University of Science and Technology, China
Copyright © 2024 Sun, Guo, Wang, Tao, Li and Zhao. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Zhenbing Zhao, emhhb3poZW5iaW5nQG5jZXB1LmVkdS5jbg==