 Dan Wang
Dan Wang Wei Xiao
Wei Xiao Tengfei Zhang
Tengfei Zhang- School of Mechanical Engineering, Shanghai Jiao Tong University, Shanghai, China
The stiffness confinement method (SCM) is frequently employed to solve the reactor dynamics equations because it confines the stiffness of the problem by frequency transformation. However, the balance between the error and efficiency of the SCM has not been well studied. This paper reports the error analysis of the SCM. The error by SCM is derived mathematically and written as integral error, driven by the integral of the frequency interpolation function. An easy-to-implement adaptive time-stepping (ATS) algorithm is proposed based on the error analysis by controlling the neutron flux amplitude error. First, a fine-step PKE is leveraged to estimate the second-order derivative of the flux amplitude-frequency, which is used to predict the error of the neutron flux amplitude. The low cost of solving the PKE incurs a negligible effect on the algorithm’s efficiency. Second, based on the error analysis, an error estimator proposed to determine an optimal time-step size for the neutron temporal-spatial equation. With a pre-set error tolerance, the ATS algorithm is exempted from the empirical selection of the time-step size in transient simulations. Numerical tests with TWIGL and modified 2D LMW benchmark problems show that the optimal time-step size effectively confines the local truncation error of the flux amplitude within the pre-set tolerance. The ATS algorithm yields a higher accuracy at a commensurate computational cost than calculations with fixed time-steps.
1 Introduction
Reactor dynamics equations (NDEs), such as the neutron temporal-spatial equation (NTSE) and the point kinetics equation (PKE), are employed to predict the transient behaviors of the neutron flux and precursors in a nuclear reactor. In the NDEs, the generation time of prompt and delayed neutrons involves multiple time scales. As these different time scales bring stiffness in the NDE, the time-step size must be sufficiently small to yield accurate results. The fine time-step causes a significant computational burden to the reactor dynamics calculations. Therefore, the stiffness confinement method (SCM) was proposed. In doing so, the SCM introduces the flux frequency and the precursor frequency to decouple the precursor equation from the NDE, thus confining the stiffness to the prompt neutron equation (Chao and Attard, 1985). Next, an exponential solution assumption decomposes the flux amplitude-frequency into the amplitude and shape frequencies (Park and Joo, 2015). By these means, the problem is transformed into a dynamic eigenvalue problem (EVP) that exhibits a similar equation form as that for the steady-state eigenvalue problem. Therefore, the dynamic EVP can be solved efficiently by power iteration and the non-linear iteration algorithm.
The SCM has already been applied in the PKE and the diffusion and transport NTSEs (Park and Joo, 2015; Tang et al., 2019). It has been demonstrated that the SCM can provide accurate and stable solutions. However, although the SCM enables solving the NTSE with a large time-step size, the computational cost of the NTSE at each time step is still high, especially for transport calculations. The adaptive time-stepping (ATS) algorithm has received much attention for further reducing computational costs. It allows transient solvers to optimally determine the time-step sizes according to the current transient state and the pre-set error tolerance. The algorithm improves the computational efficiency by allocating more time steps in time intervals where necessary. In addition, the ATS algorithm saves the trouble of empirically selecting the time-step size in transient simulations. Hence, ATS algorithms have been applied in solution methods to NTSE, such as the implicit Euler method, the quasi-static method, and the PKE-based SCM (Caron et al., 2017). However, an effective ATS algorithm for the three-dimensional SCM has yet to be developed because of the lack of comprehensive error analysis.
ATS algorithms are generally based on estimating and controlling of the local truncation error. Classically, the local truncation error
where
In this work, a theoretical error analysis of the SCM is performed. The theoretical analysis produces a mathematical error expression of the SCM. Further, an ATS algorithm is proposed by controlling the error of the neutron flux amplitude. In doing so, a fine-step PKE solver is used to evaluate high order derivatives of the neutron flux amplitude in the error expression. In addition, an error estimator based on the error expression is proposed and examined using benchmark problems. It is demonstrated that the ATS algorithm yields a higher accuracy at a commensurate computational cost than calculations with fixed time-steps.
The remainder of the paper proceeds as follows. Section 2 briefly describes the frequency-transformed NTSE and PKE. Solution methods to these equations are introduced in Section 3. In Section 4, the SCM's theoretical error analysis is performed, and an ATS algorithm based on the error analysis is proposed. Section 5 elaborates the coupling between the NTSE solver with the PKE solver. Section 6 illustrates the performance of error estimators and offers comparisons of the efficiency and accuracy between ATS and fixed time-stepping (FTS). Section 7 concludes the paper and points to directions for future research.
2 Frequency-transformation of dynamics models
The derivation of the SCM starts with the definition of the dynamic frequency. The dynamic frequency
where
Transient equations imposed with the dynamic frequency are called frequency-transformed equations. The frequency-transformed equations are solved by discretizing the time variable and searching
For simplicity, we investigate the application of the SCM to the NTSE with diffusion approximation. Extending the methodology to neutron transport problems is not arduous (Park and Joo, 2015). Transient multi-group neutron diffusion equations with delayed neutron precursors are given as:
where
The neutron flux frequency is introduced to derive the frequency-transformed dynamics model:
where
where,
The precursor concentration frequency is defined as:
Introducing the frequency-transformation, the transient multi-group neutron diffusion equations and associated delayed neutron precursor equations are rewritten as:
Equation 11 is the frequency-transformed temporal-spatial equation. Taking all frequencies in Eq. 11 to be zeros yields the static neutron diffusion equation:
The adjoint equations corresponding to Eq. 13 are:
The left-hand side of Eq. 14 is the adjoint diffusion-absorption operator, which is self-adjoint, and the right-hand side is the adjoint fission-scattering operator. Eqs 13, 14 are both EVPs, which can be solved by power iteration.
The PKE is a lumped-parameter model used to analyze the dynamic behaviors of the flux amplitude while neglecting the flux shape. As will be shown, this model is beneficial in the error analysis of the SCM. The PKE results by integrating Eqs 4, 5 weighted with the initial adjoint flux. The resulting equations are:
in which the notations are conventional thus are neglected for brevity. Readers can find detailed definitions of the dynamic parameters in Appendix-A. Correspondingly, the neutron density frequency for the PKE is be given by:
which can also be called the amplitude-frequency. The frequency-transformed point kinetics model is expressed as:
The precursor concentration equations are identical to Eq. 16.
3 Solution method for frequency-transformed equations
Introducing the dynamic eigenvalue
where,
The dynamic frequencies rendering the maximum eigenvalue
Algorithm 1. SCM for time-spatial equations.
function SpatialSolverSCM(tN, h, XS)
{tn}←{0 : h : tN } Time steps
while n ≤ N do
KOmegaIteration(··· )
end while
return
end function
function EVPSolver(XS)
% Any existing neutron transport or diffusion EVP solver
return
end function
function KOmegaIteration( )
% Input and output variables are omitted
while m≤M do
if
break
end if
XS′(tn)← Update dynamics cross-sections based Eqs. 20 and 21
end while
end function
where
The amplitude-frequency is updated using the secant method (Chao and Attard, 1985):
The iteration continues until the dynamic eigenvalue converges to 1. According to Eq. 8, normalization is necessary to update the shape-frequency with the normalized neutron flux
Such a normalization enforces the total power contributed by the normalized flux to equal the power of the previous time step, which ensures that the shape-frequency is independent of the flux amplitude. Thus, the update formula of the shape-frequency is:
where
When the actual neutron flux is solved, the precursor concentration is calculated by:
Suppose that the fission source changes linearly within
According to Eq. 12, the precursor frequency is calculated by:
The resulting flux and precursor frequencies are then used to update the dynamic cross-section. For the case of the PKE, the non-linear frequency-transformed equations can be solved using Algorithm 2:
Algorithm 2. SCM for PKE.
function PKESolverSCM(tN, h, IC, DP)
while n ≤ N do
while m≤M do
ω(m+1)(tn)←Update ω(m)(tn) based on Eq. 31
C(m+1)(tn)←Update
if
break
end if
end while
end while
return {n(tn)}, {Ci(tn)}, {ω(tn)}
end function
where
in which
In this case,
The precursor concentration
Assuming that the neutron density changes linearly with time, Eq. 32 is transformed into:
4 Error analysis and error estimator
In the SCM, polynomial functions are used to interpolate the exact frequency. The interpolation points are frequencies obtained by solving frequency-transformed equations at different time points. Figure 1 offers a schematic view of errors in the numerical integral. As shown in the figure, when a polynomial interpolation function
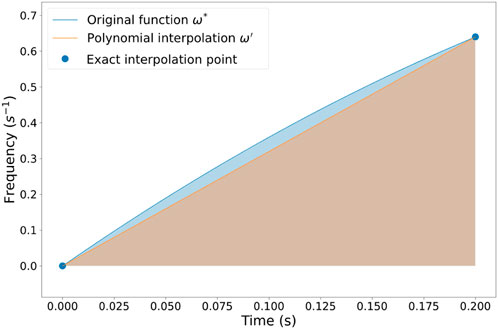
FIGURE 1. Illustration of integral error and zero-point bias with linear approximation.
With the foregoing considerations, we define the integral error contributing to truncation error in the SCM:
Definition 1. (Integral error): The integral error
The interpolation error at
where
Because the exact value of
5 Coupling of the NTSE solver with the PKE predictor
Based on the above discussions, one can select the optimal time steps for the SCM based on Algorithms 3, 4:
Algorithm 3. Adaptive time stepping SCM based on PKE predictor.
function SpatialSolverAdaptiveSCM(tN, hmax, hmin, εtol, XS)
t0←0
ϕ˜g(r,t0),keff ← EVPSolver(XS(t0))
ωT (t0),ωS,g (r,t0),µi(r,t0)←0
for tn ≤tN do n++
ICn−1,DPn−1← Initialized IC and DP
hn←TimeStepSelection(εtol,hmax,hmin,ICn−1,DPn−1)
tn←tn−1 +hn
KOMegaIteration(···)
end for
return {ϕg {r,tn},{Ci(r,tn)}, {ω(r,tn)}
end function
Algorithm 4. Adaptive time step selection based on PKE.
function TimeStepSelection(εtol, hmax, hmin, IC, DP)
{ωk}←PKESolverSCM(hmax,hsub,IC, DP)
h′←ErrorControl(εtol,ω[2])
h←max{hmin, min{h′, hmax}}
return h
end function
function ErrorControl(εtol, ω[2])
return h′
end function
Algorithm 4 shows the time-step selection subroutine with the error estimator demonstrated in Eq. 37. An optimal time-step size is chosen using the error estimator to control the local error within the pre-set error tolerance in this subroutine. Algorithm 3 is obtained by embedding Algorithm 4 in Algorithm 1.
The key to the ATS algorithm is to solve the PKE in the time interval
• The flux shape is fixed in the prior interval and the solution
• All dynamic parameters are constant in the prior interval except the reactivity
•
The SCM is also applied to solve the PKE because it directly provides the frequency for error estimation.
6 Numerical Results
In this section, the efficiency and accuracy of the ATS algorithm are tested by comparing it with FTS calculation. We examine the time stepping algorithm in the TWIGL problem and the modified LMW-2D problem. The TWIGL problem represents a transient case with step perturbation, and the LMW problem involves smooth reactivity insertions with more complicated geometrical layout that that of the TWIGL problem. The combination of the two problems can be utilized to examine the performance of the ATS algorithm under different transient scenarios.
The cross-sections and dynamic parameters of the two problems are presented in Appendix-B. The reference solutions are obtained by fine time-step size calculations. We apply the ATS algorithm to the problems with specified error tolerance. For comparisons, we also adopt FTS calculations with the same number of time steps as those used to produce the ATS results to evaluate the accuracy improvements of using the ATS algorithm. For ease of description, in these discussions we denote ATS with a tolerance of x% as ATS-x%, and denote FTS with the time step of y ms as FTS-y ms.
6.1 TWIGL
The TWIGL benchmark problem is one quarter of a 2D reactor core consisting of three kinds of fuel materials, as shown in Figure 2 (Kennedy and Riley, 2012).

FIGURE 2. Layout of TWIGL benchmark problem.
The TWIGL benchmark problem includes two different reactivity insertion cases: a simple ramp case and a composite case. The composite case is adopted to validate the ATS algorithm, which is shown in Table 1. The transient durations for both cases are 0.5 s. Note that perturbations occur only in Material 1; the other materials remain in their initial conditions. The initial power distribution is shown in Figure 3.

TABLE 1. Transient cases in TWIGL benchmark problem.
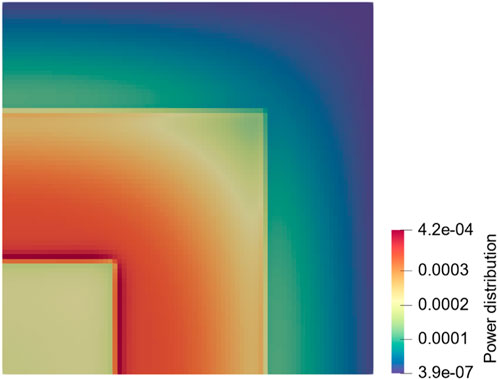
FIGURE 3. Initial power distribution for TWIGL.
In the TWIGL problem, the pre-set maximum and minimum time-step sizes are chosen as 50 and 1 ms, respectively. Figure 4A compares ATS-0.5% and FTS-20 ms. Figure 4B presents the adaptive time-step size. As shown in Figure 4A, the power curve of ATS agrees well with the reference solution, especially shortly after the step points. Step perturbations are introduced at 0.2 and 0.4 s. Accordingly, the ATS algorithm automatically refines step sizes shortly after step points but otherwise uses a coarse step size. Such a time step adjustment intelligently allocates time steps and spends more computational resources on the interval with rapid changes.
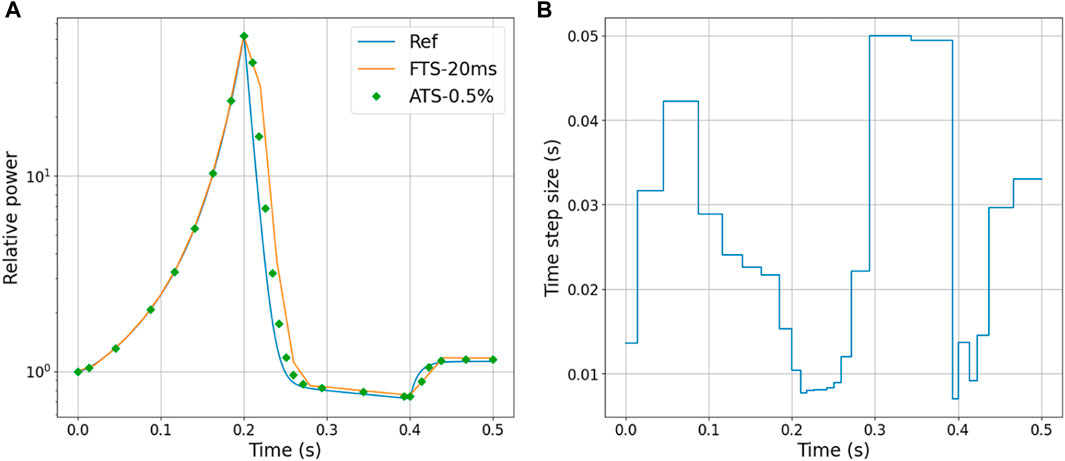
FIGURE 4. Comparison of ATS-0.5% and FTS-20 ms in TWIGL (A) Core power (B) Time-variant adaptive time-step size.
Figure 5A, B compare the results of ATS-0.1% and FTS-12.5 ms. The performance is similar to that in the previous error tolerance setting.
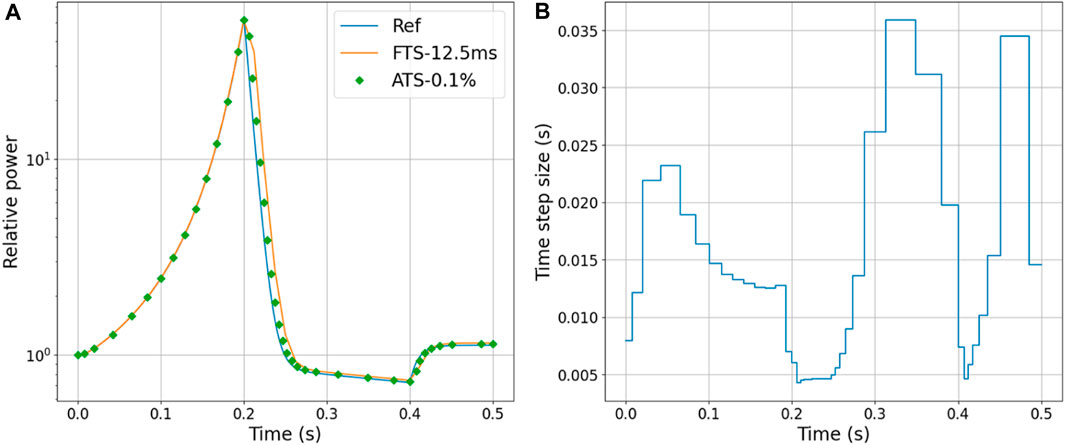
FIGURE 5. Comparison of ATS-0.1% and FTS-12.5 ms in TWIGL (A) Core power (B) Time-variant adaptive time-step size.
Table 2 summarizes the global core power error at different time step points. The ATS algorithm significantly improves the computational accuracy when the same number of time steps is used, with an error reduction of up to 40∼50%. The comparison of ATS-0.5% and FTS-12.5 ms in Table 2 indicates that the ATS algorithm can reduce by 37% the computational time of the FTS calculation with similar numerical accuracy. More significant gains can be expected for large-scale neutron transport problems.

TABLE 2. Comparison of global amplitude error between ATS and FTS in TWIGL.
6.2 Modified 2D-LMW
The second 2D benchmark problem is modified from the 3D LMW (Langenbuch, Maurer, Werner) problem without thermal-hydraulic feedback to match the simulation code used in the paper (Kennedy and Riley, 2012). The reactor core is a simplified pressurized water reactor containing two kinds of fuel assemblies and two groups of control rods (CR), as shown in Figure 6.
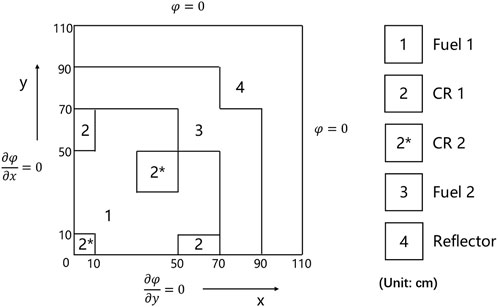
FIGURE 6. Layout of modified LMW-2D benchmark problem.
The modified 2D LMW problem is designed to model a reactivity insertion case, as shown in Table 3. This case is the superposition of ramp perturbations in different regions, by perturbing materials in CR 1 and CR 2. The initial power distribution is illustrated in Figure 7.
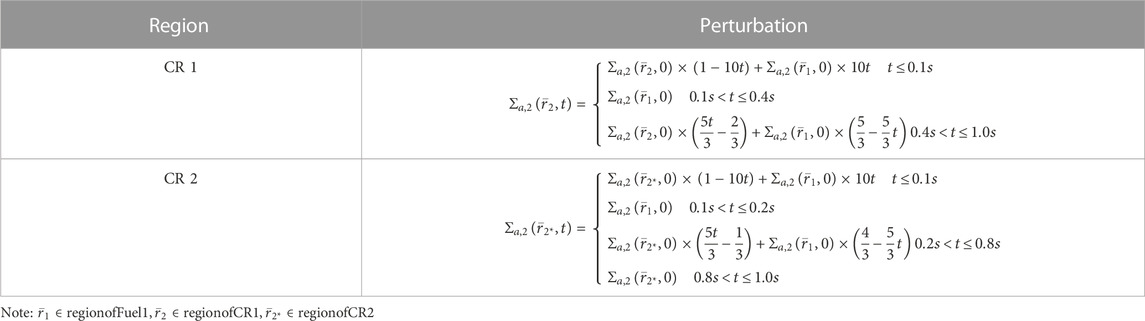
TABLE 3. Perturbations in modified LMW-2D benchmark problem.

FIGURE 7. Initial power distribution for modified 2D-LMW (Only non-zero power displayed).
For the modified 2D-LMW, Figures 8, 9 present a comparison between the results of the ATS and FTS calculations. In Figure 8A, the error of the power peak, which appears at 0.4 s, is 905.02 and 3344.92 for ATS and FTS, respectively. In Figure 9A, the error of the power peak is 316.87 and 2219.20. The noticeable improvement in the accuracy of the power peak demonstrates the efficacy of the ATS algorithm.
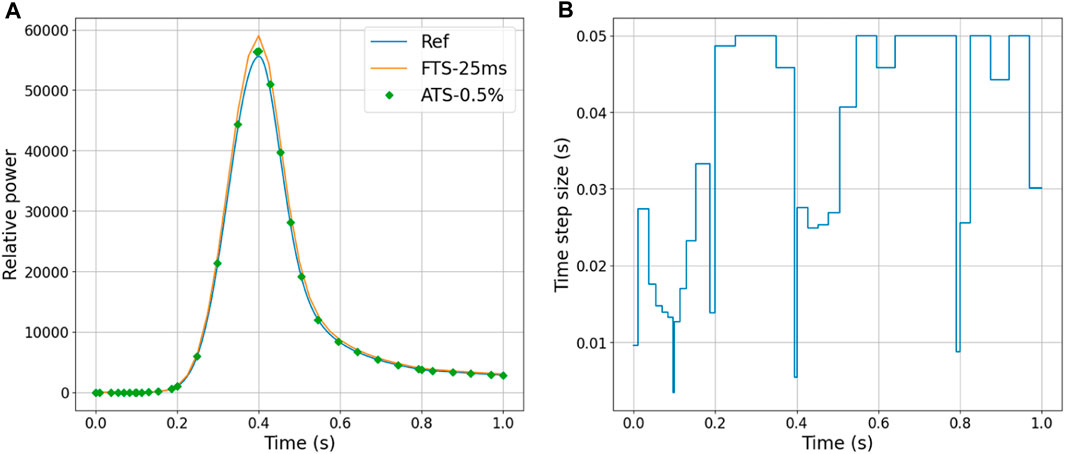
FIGURE 8. Comparison of ATS-0.5% and FTS-25 ms in modified 2D-LMW (A) Core power (B) Time-variant adaptive time-step size.
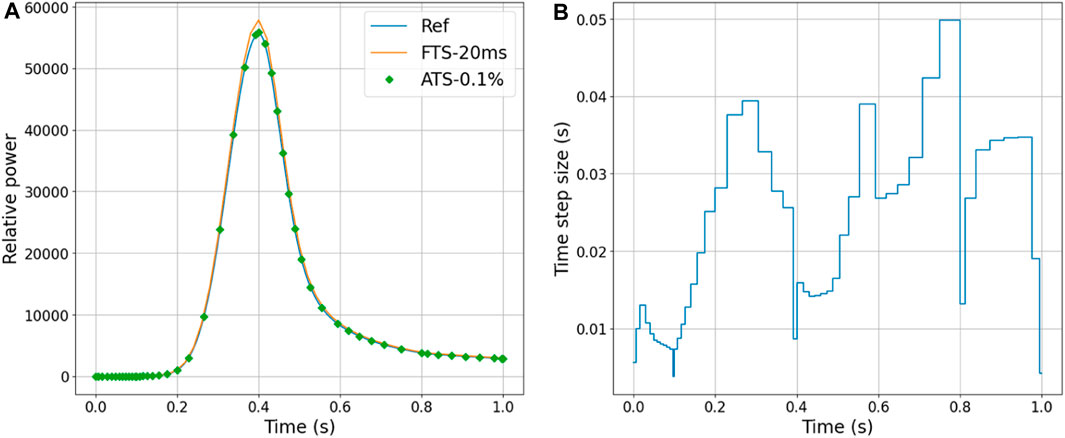
FIGURE 9. Comparison of the ATS-0.1% and FTS-20 ms in modified 2D-LMW (A) Core power (B) Time-variant adaptive time-step size.
Figure 10 presents the relative spatial error at 0.4s for ATS and FTS. We can observe that the error distribution is fairly uniform in both cases, but the accuracy of ATS is higher than that of FTS.
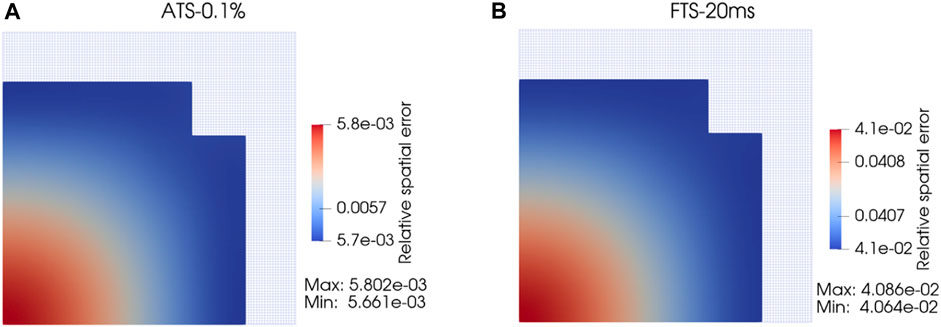
FIGURE 10. Comparison of relative spatial error at 0.4 s between ATS-0.1% and FTS-20 ms. (A) ATS-0.1%; (B) FTS-20 ms.
Table 4 summarizes the global core power error. The results show that the numerical accuracy can be improved significantly. For example, comparing FTS-20 ms and ATS-0.1%, the error reduction can be up to 90%∼95%. The core power increases by more than four orders of magnitudes from the initial power, whose variation is much wider than that in the TWIGL problem, but there is no step perturbation. Thus, continuity of frequency enables superior error control.
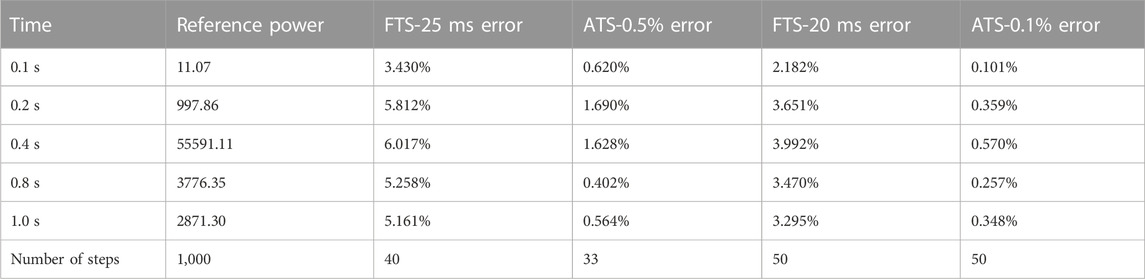
TABLE 4. Comparison of global amplitude error between ATS and FTS in modified 2D-LMW.
7 Conclusion
In this work, we perform theoretical and numerical error analyses of the SCM. By expressing the error term using integral error, the mathematical expression of the amplitude error is derived. The integral error is caused by using a polynomial function to represent the exact solution. Based on theoretical analysis, we develop an efficient and easy-to-implement ATS algorithm based on the PKE predictor. A fine-step PKE solver is used to rapidly evaluate high order derivatives of the neutron flux amplitude in the theoretical error expression. The high-order derivatives are used to determine the optimal time-step size for the NTSE. A time step error-estimator for this ATS algorithm is derived, and numerical validation indicates that the ATS is satisfactory in performance and easy to implement.
The accuracy and computational cost of ATS and FTS are examined using benchmark problems. Comparisons show that the ATS algorithm can achieve higher accuracy with the same number of time steps, and significantly improve computational efficiency in the NTSE. It was found that the ATS algorithm significantly improves the computational accuracy when the same number of time steps is used, with error reductions of up to 40%∼50% for the TWIGL benchmark and up to 90%∼95% for the LMW benchmark. With similar numerical accuracy, the ATS algorithm can reduce by 37% the computational time of the FTS calculation. Future work is to apply the adaptive SCM to 3D neutron transport problems.
Data availability statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author contributions
DW: Conceptualization, Formal analysis, Methodology, Validation, Writing–original draft. WX: Formal analysis, Methodology, Resources, Writing–review and editing. ZD: Supervision, Writing–review and editing. TZ: Conceptualization, Funding acquisition, Methodology, Writing–review and editing.
Funding
The authors declare that no financial support was received for the research, authorship, and/or publication of this article.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fenrg.2023.1284230/full#supplementary-material
References
Aboanber, A. E., and Hamada, Y. M. (2008). Generalized Runge–Kutta method for two-and three-dimensional space–time diffusion equations with a variable time step. Ann. Nucl. Energy 35 (6), 1024–1040. doi:10.1016/j.anucene.2007.10.008
Ban, Y., Endo, T., and Yamamoto, A. (2012). A unified approach for numerical calculation of space-dependent kinetic equation. J. Nucl. Sci. Technol. 49 (5), 496–515. doi:10.1080/00223131.2012.677126
Boffie, J., and Pounders, J. M. (2018). An adaptive time step control scheme for the transient diffusion equation. Ann. Nucl. Energy 116, 280–289. doi:10.1016/j.anucene.2018.02.044
Caron, D., Dulla, S., and Ravetto, P. (2017). Adaptive time step selection in the quasi-static methods of nuclear reactor dynamics. Ann. Nucl. Energy 105, 266–281. doi:10.1016/j.anucene.2017.03.009
Chao, Y. A., and Attard, A. (1985). A resolution of the stiffness problem of reactor kinetics. Nucl. Sci. Eng. 90 (1), 40–46. doi:10.13182/nse85-a17429
Park, B. W., and Joo, H. G. (2015). Improved stiffness confinement method within the coarse mesh finite difference framework for efficient spatial kinetics calculation. Ann. Nucl. Energy 76, 200–208. doi:10.1016/j.anucene.2014.09.029
Tang, C., Bi, G., and Yang, B. (2019). Application of stiffness confinement method in transient neutron transportation calculation. Atomic Energy Sci. Technol. 53 (7), 1202. doi:10.7538/yzk.2018.youxian.0836
Wanner, G., and Hairer, E. (1996). Solving ordinary differential equations II, 375. New York: Springer Berlin Heidelberg.
Zhang, T., Wang, Y., Lewis, E. E., Smith, M. A., Yang, W. S., and Wu, H. (2017). A three-dimensional variational nodal method for pin-resolved neutron transport analysis of pressurized water reactors. Nucl. Sci. Eng. 188 (2), 160–174. doi:10.1080/00295639.2017.1350002
Keywords: stiffness confinement method, reactor dynamics equation, error analysis, adaptive time stepping algorithm, nuclear reactor
Citation: Wang D, Xiao W, Du Z and Zhang T (2023) An adaptive time stepping stiffness confinement method for solving reactor dynamics equations. Front. Energy Res. 11:1284230. doi: 10.3389/fenrg.2023.1284230
Received: 28 August 2023; Accepted: 15 September 2023;
Published: 10 October 2023.
Edited by:
Yugao Ma, Nuclear Power Institute of China (NPIC), ChinaReviewed by:
Shanfang Huang, Tsinghua University, ChinaZeyun Wu, Virginia Commonwealth University, United States
Luteng Zhang, Chongqing University, China
Copyright © 2023 Wang, Xiao, Du and Zhang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Tengfei Zhang, emhhbmd0ZW5nZmVpQHNqdHUuZWR1LmNu