 Yanan Wang1
Yanan Wang1 Zhimin Guo
Zhimin Guo
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Energy Res., 02 March 2023
Sec. Process and Energy Systems Engineering
Volume 11 - 2023 | https://doi.org/10.3389/fenrg.2023.1133516
This article is part of the Research TopicAdvances in Flexibility Exploration and Utilization for Low Carbon Power SystemsView all 6 articles
Abstract: The development of electronics and software has resulted in the ability of twin agents to act as digital counterparts for the optimization, control, and monitoring of real power grids. When increasing regulation resources are connected to the power grid, is challenging for independent system operators to use a centralized controller to achieve power tracking and balance. Therefore, the present study applied device-level-based digital twins to monitor physical signals for computer-aided design for power tracking. Moreover, a consensus control-based distributed power tracking system is proposed for the physical-model simulation of the power grid. A communication network was also designed for realistic signal exchange. The combination of the proposed distributed power tracking method and communication network can accelerate computational efficiency and protect the privacy of the regulation resources. Finally, the performance of the proposed distributed power tracking method is validated in a simulation system with 10 regulation resources.
With the new energy development, increasing regulation resources participate in power tracking (Wu et al., 2021a; Zang et al., 2021; Wu et al., 2022). Traditional power tracking models only concern a centralized controller (Ray et al., 1999) with optimal algorithms for independent system operators (Zhang et al., 2020). However, with the increase in regulation resources, the computational costs for the optimization of dynamic power tracking also increase. Thus, high-quality dispatch schemes are hard to obtain using traditional centralized controller-based power tracking methods. Among, the recent advancements in electronics and software, digital twin agents can be viewed as digital counterparts for the optimization, control, and monitoring (Zhao and Lin, 2022) of real power grids (Doherty et al., 2010). Meanwhile, distributed-based power tracking frameworks (Kakran and Chanana, 2018) have been proposed to reduce computational costs and increase the optimal speed.
The key component of the digital concept is that it represents the connection between the physical and digital worlds, which enables an improved physical quantity model by combining the virtual and actual worlds. NASA and Michael Greaves defined a digital twin as a digital counterpart of a virtual physical thing or system (Schleich et al., 2017). Consequently, the digital twin technique is a powerful tool to integrate the real and the virtual to more effectively manage intelligence. Previous studies have proposed the integration of the power grid with the digital twin technique. A novel structure based on a deep neural network technique was introduced by Zhou et al. (2019) to further provide a short time delay in the power grid for real-time online optimization. Moreover, Pan et al. (2020) developed a life cycle pattern with control, fault detection, and simulation applications. This work formulated a digital twin-based framework of communication between the virtual smart grid and the real power system. Additionally, Wang et al. (2021) described a data-driven-based methodology for feature extraction of the operational state for the power grid, which implemented a recursive state and provided decreased performance evaluation times.
Power tracking in power grids is a non-linear (Lakshmanan et al., 2016), multiple-constraint (Li et al., 2016), and time-series problem (Sadeghi-Mobarakeh and Mohsenian-Rad, 2017). For these applications, centralized-based power tracking approaches, such as mathematical programming (Xie et al., 2000) or heuristic algorithms (Deb et al., 2002) are often used to obtain high-quality dispatch schemes. With the decentralization of the power grid and the expansion of regulation resources, it is hard for conventional centralized approaches to quickly determine a global optimum within the scheduled time (Wu et al., 2021b; Cheng et al., 2023). Compared to conventional centralized power tracking approaches such as mathematical programming or heuristic algorithms, distributed-based algorithms (Erdeljan et al., 2014) can more quickly provide optimal solutions for power grids. The two basic types of distributed methodologies for optimization are leaderless and leader-based, which are formulated for power tracking in power grids. Cui et al. (2018) presented an auction algorithm-based economic dispatch with leaderless regulation resources and evaluated the performance of various auction algorithms in various communication scenarios and clarified the impact of swap operations and communication networks of the regulation resources. Zhang et al. (2018) developed a framework for cyber, resource, and social systems and presented a human communication-based distributed consensus algorithm for regulation resources for a combined heat and power system. Furthermore, for the high connection of new energy resources, Zhang et al. (2021), proposed an adaptive parameter for the swap operation. Their study executed two simulation systems with various seniors for communication networks and verified the high performance of the proposed adaptive auction method. They also implemented a novel random forest base-auction method for the power tracking of a photovoltaic station (PV). Lastly, Zhang et al. (2022) developed a hydrogen regulation resource to store PV power output and formulate a negotiate-based distributed method to exploit the reconfiguration and provide the maximum profit for a PV-coordinated hydrogen system.
Among leader-based algorithms, the commonly used methodology is the cooperative consensus technique. Zhang and Chow (2012) used a consensus algorithm to quickly obtain an economic dispatch scheme by selecting a leader of a regulation resource and reaching the incremental cost. Bidram et al. (2013a) described a technique that facilitated the linearization of distributed generation for voltage control. The authors also developed an approach for cooperative consensus of regulation voltage (Bidram et al., 2013b). This study demonstrated that the proposed communication network provided a more reliable solution than the traditional centralized controller. Zhang et al. (2016a) formulated a distributed robust consensus method for transmission delay and noise. The simulation results showed that the algorithm could search for high-quality optimums at outage disturbances for economic dispatch. Subsequently, Zhang et al. (2016b) proposed a framework of virtual regulation resource tribe for frequency control with transfer learning-based consensus for regulation cost and ramp time.
Based on the fast computation of the distributed consensus method, communication network-based consensus algorithms will more be appropriate for communication between regulation resources. The present work employs a consensus control algorithm to rapidly obtain a high-performance scheme for power tracking with digital twin agents. The network communication between the agents is presented and the gain function is formulated for fast optimization. The main contributions of this work are as follows.
1) In contrast to previous work, this study proposes a digital twin agents-based power tracking model. It includes the life cycle of power tracking, from disturbance collection to controller strategy optimization, regulation resource response, and dynamic control performance visualization. Previous studies have focused on improving the computation time and optimal strategy but seldom apply the combination of digital twin agents and distributed power tracking with compensation payment (Papalexopoulos and Andrianesis, 2014). In particular, the influence of load disturbance on the dynamic control performance standard (CPS) can be rapidly evaluated for power grids.
2) A distributed consensus control-based algorithm (DCCA) for device-level digital twin agents is formulated to quickly obtain an optimal dispatch scheme for real-time power tracking. A distributed communication network to accelerate the communication speed and protect the privacy of the regulation resources is also presented. The proposed DDCCA can cooperate with the regulation resources, effectively utilize the fast regulation performance of renewable energy resources, and improve the control performance standard for digital twin-based distributed power tracking (DT-DPT).
The remaining sections of this work are organized as follows: Section 2 describes the mathematical model of DT-DPT that coordinates the device-level digital twin agents. Section 3 illustrates the specific implementation of DCCA for DT-DPT. Section 4 executes the simulation experiments and discusses the results. Finally, Section 5 concludes this paper.
The DT-DPT framework is shown in Figure 1. DT-DPT includes physical information, algorithm optimization, and framework evaluation. In the physical control process, a load disturbance is exerted on the power grid. The frequency and tie-line power are then measured for real-time power tracking. Next, the controller will receive the signal and distribute the power command to the regulation resources according to the DCCA optimization. Finally, the performance of dynamic control is evaluated. Generally, the regulation resources in DT-DPT contain conventional resources (coal-fire, hydrogen, liquefied natural gas [LNG], wind farm [WF], and photovoltaic [PV]). Among the regulation resources, one was selected as the consensus leader for optimization; the others were consensus followers.
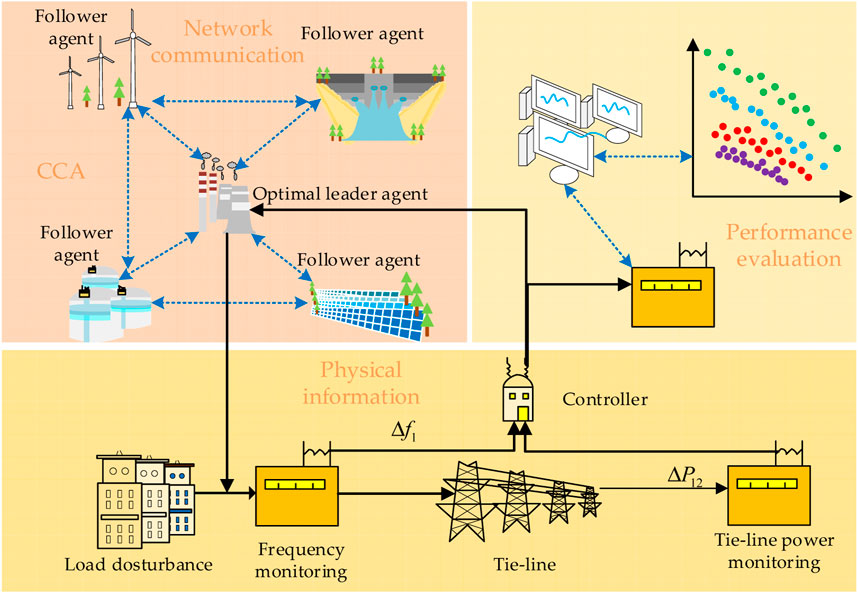
FIGURE 1. DT-DPT framework.
To better imitate the connection between the physical reality and simulation model, some constraints should be considered in DT-DPT, including change dynamic due to the rapid regulation of power grid features. During power tracking, the constraints primarily include the regulation direction, power balance, generation capacity, and generation ramp (Yu et al., 2011), as follows.
1) Regulation direction constraint: To fully utilize the regulation resources, the regulation direction of the resources’ power command should be equal to the direction of total power command, as follows:
where
2) Power balance constraint: To confirm that the optimal solution satisfies the power grid regulation requirements, the accumulation of power regulation input commands received by all DT-DPT regulation resources should be accurately equivalent to the total power regulation command issued by the power grid, as follows:
3) Generation capacity constraint: To guarantee that the regulation resource has a good regulation performance and a secure environment, the power regulation commands obtained by the DT-DPT regulation resources should not exceed their capacities, as follows:
where
4) Generation ramp constraint: For the new energy regulation resources, the regulation of these resources can change rapidly due to control by the electrical switch. However, for traditional regulation resources, they should consider the generation ramp constraint, as follows:
where
As the main focus of this work is the minimum frequency mileage-based (Chen et al., 2015) compensation of the DT-DPT regulation resources, one optimization goal is to reduce the total compensation payment of the regulation resources for the individual system operator. The regulation compensation payment can be computed by the comprehensive price coefficient and regulation power deviation (Wang et al., 2017). The comprehensive payment coefficient depends on the ramp performance and time delay of the regulation resources (Ariyo et al., 2014), as follows:
where
Since DT-DPT balances the power disturbance, the DCCA can be used to quickly obtain a power scheme. The regulation resources can be seen as nodes or agents; the corresponding communication network framework ids are shown in Figure 2, in which the graph
The following row stochastic matrix
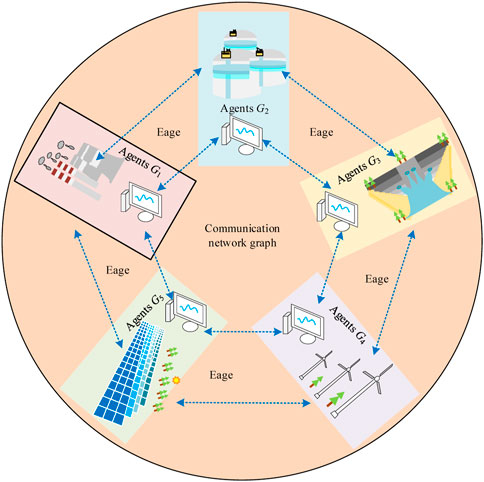
FIGURE 2. DT-DPT communication network.
Generally, based on the proposed communication network and matrix, DCCA can be formulated by several operations, as follows.
1) Payment compensation consensus: Based on the computation of the compensation payment in Eqs. 5–8, the payment compensation can be updated by the row stochastic matrix, as follows:
where
2) Updating of the optimal leader: Firstly, the optimal leader can be updated by incrementing or decrementing the tracking power. Thus, the regulation resource with the highest
where
3) Modification of the power scheme: To ensure that the optimal solution does not violate the power capacity, the regulation resources that disobey the power constraints should be modified to the feasible zone of the solution. The feasible zone of the compensation payment should also be considered, as follows:
4) Consensus optimal process: For the presented computation of leader payment compensation and consensus computation, the power tracking error will decrease to nearly zero after a certain optimal iteration. The optimal process will terminate when the power error is a small value
The optimal process of DCCA for DT-DPT is presented in Table 1.
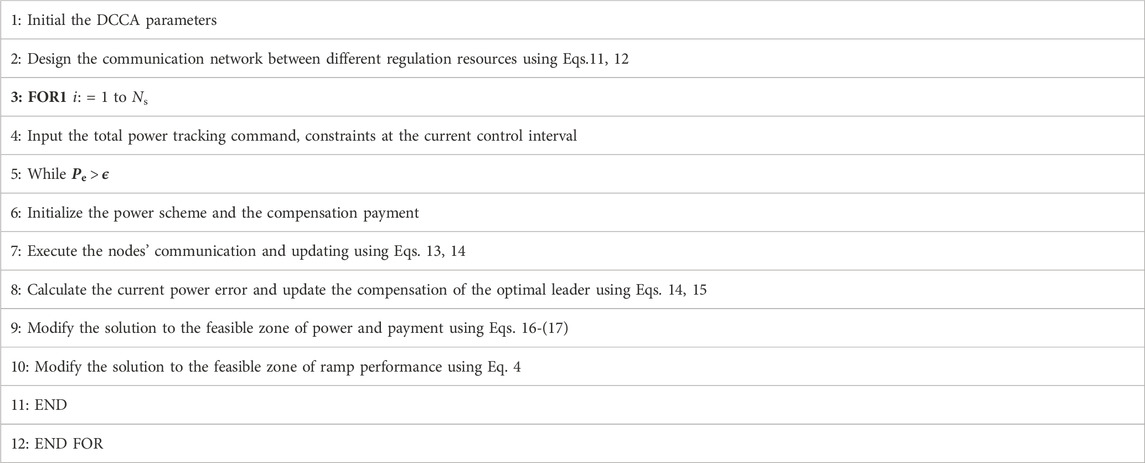
TABLE 1. xecution of DCCA for DT-DPT.
In the simulation test, a DT-DPT system with ten regulation resources was designed to verify the performance of the proposed algorithm. Table 2 lists the parameters of the DT-DPT system with five types of regulation resources. Table 3 lists the parameters of the regulation resources. The control interval period ΔT was set to 4 s, the total time control interval in one service period Ns was set to 900 (1 h), and the mileage coefficient for compensation payment was 2 $/MW.
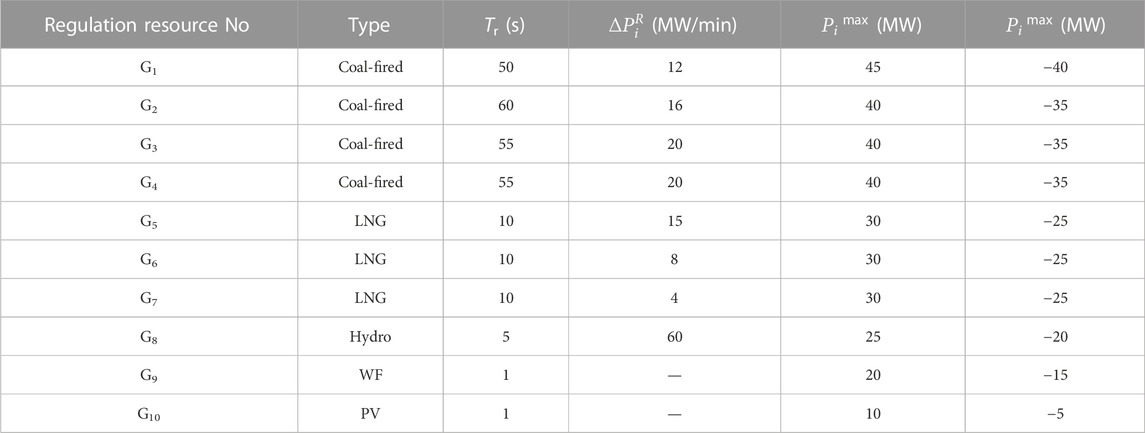
TABLE 2. Main parameters of the dispatch regulation resources in the DT-DPT system.

TABLE 3. Main parameters of the transfer function in the regulation resources.
To set the DCCA parameters, the termination parameter for optimal process
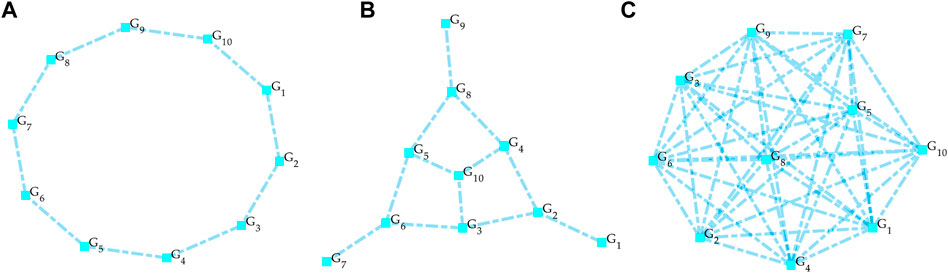
FIGURE 3. Communication network of ten regulation resources for the DT-DPT system. (A) Ring network. (B) Local connected network. (C) Fully connected network.
This section constructed two power commands (
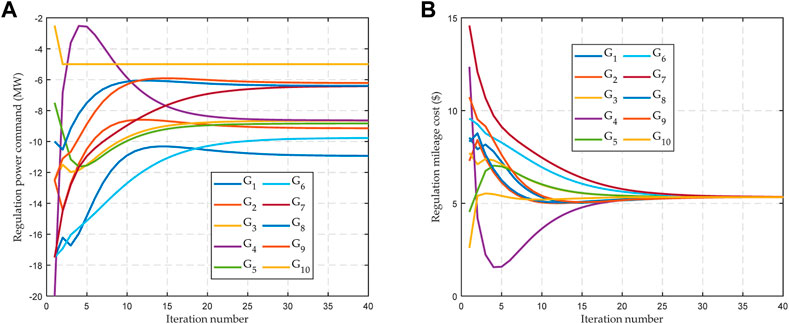
FIGURE 4. Local connected network test with a power dispatch command
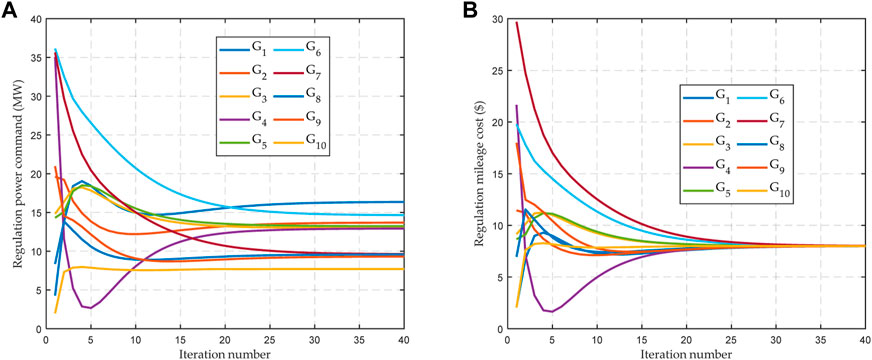
FIGURE 5. Local connected network test with a power dispatch command
The proposed three topology networks (Figure 3) were used to analyze the influence of various connected agents for DCCA convergence. The networks included the ring, local connected, and fully connected networks. These three networks assist in the optimization of the DCCA in the two power command scenarios (

FIGURE 6. Convergence of the DCAA for different communication networks for DT-DPT systems in two scenarios. (A)
This section compares the performance of DCCA to a proportional method (PROP) (Papalexopoulos and Andrianesis, 2014) by constructing two load step disturbances (
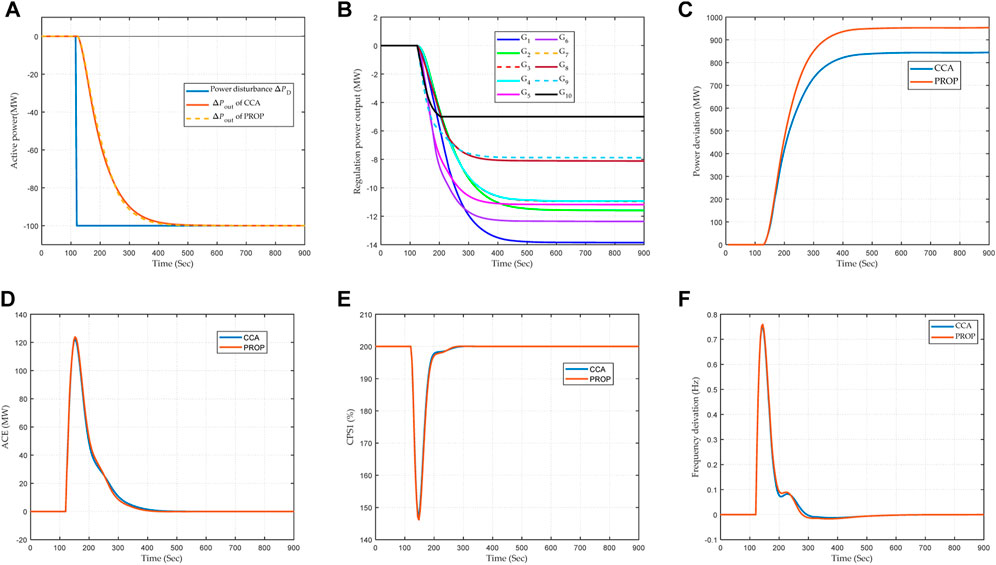
FIGURE 7. Dynamic power tracking schemes acquired by the proposed CCA and PROP at

FIGURE 8. Dynamic power tracking schemes acquired by the proposed CCA and PROP at
First, the tracking processes of the two approaches for a DT-DPT system at
Likewise, the tracking process between the regulation power command and the real-time power output acquired by the two algorithms under a load step disturbance
To further verify the superiority of the proposed method, a stochastic load disturbance given in Figure 9A is constructed to be executed to the DT-DPT system. Additionally, the CPS and power deviation are used to exemplify the dynamic regulation performance with the local connected network-based DCCA and proportional-based approach. First, Figure 9A shows the real-time power tracking of the two algorithms, in which the lower power tracking power is acquired by the proposed DCCA rather than the PROP. Moreover, the proposed method effectively reduced the power deviation for the DT-DPT system under stochastic load disturbance (Figure 9C). This may be due to the high coordinate ability and real-time regulation performance of the DCCA for the various regulation resources (Figure 9B) while the proportional-based method lacks the optimal mechanism for compensation payment or dynamic regulation. Finally, the dynamic CPS curve is shown in Figure 9D, in which the proposed method helps to reduce CPS decrement, thus demonstrating that the proposed DCCA can acquire a power scheme with a higher regulation performance than the traditional PROP.
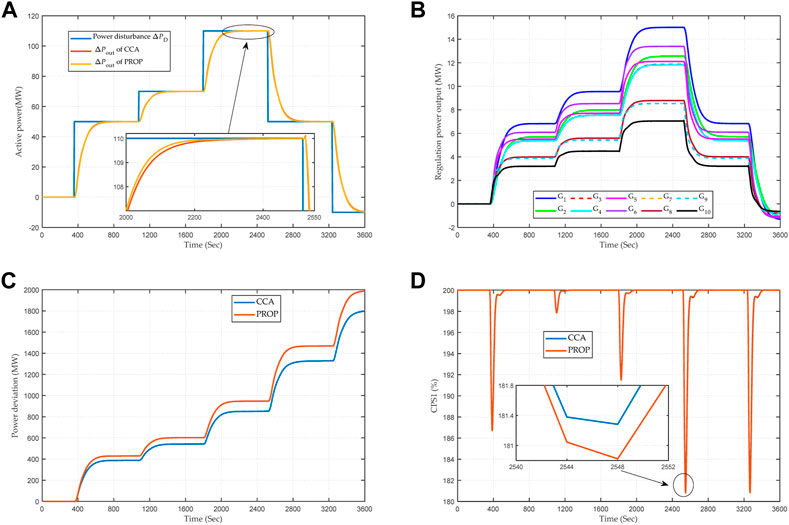
FIGURE 9. Dynamic power tracking scheme acquired by the proposed CCA and PROP for a stochastic power disturbance. (A) Power tracking curve. (B) Regulation resource output curves obtained by the proposed CCA. (C) Dynamic power deviation. (D) Dynamic CPS.
Lastly, the optimal results of online optimization under various disturbance scenarios are shown in Table 4. Indexes including the ACE maximum and minimum, frequency deviation, and CPS are used to compare the tracking performance of CCA and PROP. The power deviation of the agent power tracking is represented by the approximate degree between the real-time output and input commands. The results demonstrated that the suggested strategy could significantly minimize power variation while simultaneously improving tracing accuracy. In the ninth simulation experiments of step load disturbances, the suggested approach effectively reduced the power deviation by 21.7%, 10.1%, 9.8%, 7.0%, 7.0%, 11.7%,16.1%, 10.1%, respectively, and improved the CPS scores by 23%, 3.6%, 0.90%, 0.16%, 0.16%, 0.9%, 3.6%, 23.2%, and 4.7%, respectively. Thus, with increased power amplitude, the optimization performance of the algorithm becomes more significant.

TABLE 4. Comparisons of dynamic optimization under different disturbances.
The three contributions made in this work are as follows.
1) The proposed DT-DPT demonstrated a power tracking process with disturbance collection, controller strategy optimization, regulation resource response, and visualization of dynamic control performance.
2) The proposed local connected network can help accelerate the convergence of the DCCA in the DT-DPT system and reduce the communication pressure between digital agents in power tracking systems.
3) The load disturbance tests of the DT-DPT demonstrated that the proposed DCCA effectively and efficiently provided a high-quality solution for the DT-DPT system. This method effectively increased the CPS sconce, reduced the power and frequency deviations in the power tracking area, and reduced the ACE for the DT-DPT system.
The original contributions presented in the study are included in the article/supplementary material. Further inquiries can be directed to the corresponding author.
YW, ZG, and YP contributed to the study conception and design. KG and JZ organized the database. YW wrote the first draft of the manuscript. ZG, YP, KG, and JZ wrote sections of the manuscript. All authors contributed to the manuscript revision and read and approved the submitted version.
This work was supported by Research on Digital Twin-based Management and Interaction Technology for Efficient Collaboration of County Energy Internet (5700-202224202A-1-1-ZN).
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Ariyo, A., Adewumi, A. O., and Ayo, C. K. (2014). “Stock price prediction using the arima model,”. in UKSim-AMSS 16th International Conference on Computer Modelling and Simulation, IEEE, 106–112. doi:10.1109/UKSim.2014
Bidram, A., Davoudi, A., Lewis, F. L., and Qu, Z. (2013). “Secondary control of microgrids based on distributed cooperative control of multi-agent systems,”. Transm. Distribution 7 (8), 822–831. IET Generation. doi:10.1049/iet-gtd.2012.0576
Bidram, A., Davoudi, A., Lewis, F. L., and Guerrero, J. M. (2013). “Distributed cooperative secondary control of microgrids using feedback linearization,”. IEEE Trans. power Syst. 28 (3), 3462–3470. doi:10.1109/TPWRS.2013.2247071
Chen, Y., Leonard, R., Keyser, M., and Gardner, J. (2015). “Development of performance-based two-part regulating reserve compensation on MISO energy and ancillary service market,”. IEEE Trans. power Syst. 30 (1), 142–155. doi:10.1109/TPWRS.2014.2320519
Cheng, L., Zang, H., Wei, Z., and Sun, G. (2023). “Secure multi-party household load scheduling framework for real-time demand-side management,”. IEEE Trans. Sustain. Energy 14, 602–612. doi:10.1109/TSTE.2022.3221081
Cui, S., Wang, Y., Lin, X., and Liu, X. K. (2018). “Distributed auction optimization algorithm for the nonconvex economic dispatch problem based on the gossip communication mechanism,”. Int. J. Electr. Power and Energy Syst. 95, 417–426. doi:10.1016/j.ijepes.2017.09.012
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T. (2002). “A fast and elitist multiobjective genetic algorithm: NSGA-II,”. IEEE Trans. Evol. Comput. 6 (2), 182–197. doi:10.1109/4235.996017
Doherty, R., Mullane, A., Nolan, G., Burke, D., Bryson, A., and O'Malley, M. (2010). “An assessment of the impact of wind generation on system frequency control,” in IEEE transactions on power systems (IEEE), 452–460. doi:10.1109/TPWRS.2009.2030348251
Erdeljan, A., Capko, D., Vukmirovic, S., Bojanic, D., and Congradac, V. (2014). “Distributed PSO algorithm for data model partitioning in power distribution systems,”. J. Appl. Res. Technol. 12 (5), 947–957. doi:10.1016/S1665-6423(14)70601-7
Kakran, S., and Chanana, S. (2018). “Smart operations of smart grids integrated with distributed generation: A review,”. Renew. Sustain. Energy Rev. 81, 524–535. doi:10.1016/j.rser.2017.07.045
Lakshmanan, V., Marinelli, M., Hu, J., and Bindner, H. W. (2016). “Provision of secondary frequency control via demand response activation on thermostatically controlled loads: Solutions and experiences from Denmark,”. Appl. Energy 173, 470–480. doi:10.1016/j.apenergy.2016.04.054
Li, N., Zhao, C., and Chen, L. (2016). “Connecting automatic generation control and economic dispatch from an optimization view,”. IEEE Trans. Control Netw. Syst. 3 (3), 254–264. doi:10.1109/TCNS.2015.2459451
Pan, H., Dou, Z., Cai, Y., Li, W., Lei, X., and Han, D. (2020). “Digital twin and its application in power system,” in 2020 5th International Conference on Power and Renewable Energy (IEEE), 21–26. doi:10.1109/ICPRE51194.2020.9233278
Papalexopoulos, D., and Andrianesis, P. E. (2014). “Performance-based pricing of frequency regulation in electricity markets,”. IEEE Trans. power Syst. 29 (1), 441–449. doi:10.1109/TPWRS.2012.2226918
Ray, G., Prasad, A., and Prasad, G. (1999). “A new approach to the design of robust load-frequency controller for large scale power systems,”. Electr. power Syst. Res. 51 (1), 13–22. doi:10.1016/S0378-7796(98)00125-4
Sadeghi-Mobarakeh, A., and Mohsenian-Rad, H. (2017). “Optimal bidding in performance-based regulation markets: An MPEC analysis with system dynamics,”. IEEE Trans. Power Syst. 32 (2), 1282–1292. doi:10.1109/TPWRS.2016.2583435
Schleich, B., Anwer, N., Mathieu, L., and Wartzack, S. (2017). “Shaping the digital twin for design and production engineering,”. Cirp Ann. Manuf. Technol. 66 (1), 141–144. doi:10.1016/j.cirp.2017.04.040
Wang, H., Ponciroli, R., Vilim, R., Alfonsi, A., and Rabiti, C. (2021). “A recursive data-driven approach to state variable selection and digital twin derivation,” in 12th International Topical Meeting on Nuclear Plant Instrumentation, Control and Human Machine Interface Technologies. doi:10.13182/T124-34472
Wang, Z., Zhong, J., and Li, J. (2017). “Design of performance-based frequency regulation market and its implementations in real-time operation,”. Int. J. Electr. Power and Energy Syst. 87, 187–197. doi:10.1016/j.ijepes.2016.10.013
Wu, Y., Liang, X., Huang, T., Lin, Z., Li, Z., and Hossain, M. F. (2021). “A hierarchical framework for renewable energy sources consumption promotion among microgrids through two-layer electricity prices,”. Renew. Sustain. Energy Rev. 145, 111140. doi:10.1016/j.rser.2021.111140
Wu, Y., Lin, Z., Liu, C., Chen, Y., and Uddin, N. (2021). “A demand response trade model considering cost and benefit allocation game and hydrogen to electricity conversion,”. IEEE Trans. Industry Appl. 58, 2909–2920. doi:10.1109/TIA.2021.3088769
Wu, Y., Lin, Z., Liu, C., Huang, T., Chen, Y., Ru, Y., et al. (2022). “Resilience enhancement for urban distribution network via risk-based emergency response plan amendment for ice disasters,”. Int. J. Electr. Power and Energy Syst. 141, 108183. doi:10.1016/j.ijepes.2022.108183
Xie, K., Song, Y., Stonham, J., Yu, E., and Guangyi Liu, (2000). “Decomposition model and interior point methods for optimal spot pricing of electricity in deregulation environments,”. IEEE Trans. Power Syst. 15 (1), 39–50. doi:10.1109/59.852099
Yu, T., Wang, Y., Ye, W., Zhou, B., and Chan, K. (2011). “Stochastic optimal generation command dispatch based on improved hierarchical reinforcement learning approach,”. IET Generation, Transm. Distribution 5 (8), 789–797. doi:10.1049/iet-gtd.2010.0600
Zang, H., Xu, R., Cheng, L., Ding, T., Liu, L., Wei, Z., et al. (2021). “Residential load forecasting based on LSTM fusing self-attention mechanism with pooling,”. Energy 229, 120682. doi:10.1016/j.energy.2021.120682
Zhang, X., Li, Q., Yu, T., and Yang, B. (2016). “Consensus transfer Q-learning for decentralized generation command dispatch based on virtual generation tribe,”. IEEE Trans. Smart Grid 9 (3), 1–2165. doi:10.1109/TSG.2016.2607801
Zhang, X., Tan, T., Zhou, B., Yu, T., Yang, B., and Huang, X. (2021). “Adaptive distributed auction-based algorithm for optimal mileage based AGC dispatch with high participation of renewable energy,”. Int. J. Electr. Power and Energy Syst. 124, 106371. doi:10.1016/j.ijepes.2020.106371
Zhang, X., Xu, H., Yu, T., Yang, B., and Xu, M. (2016). “Robust collaborative consensus algorithm for decentralized economic dispatch with a practical communication network,”. Electr. Power Syst. Res. 140, 597–610. doi:10.1016/j.epsr.2016.05.014
Zhang, X., Yu, T., Ma, X., and Guo, L. (2022). “An efficient multi-agent negotiation algorithm for multi-period photovoltaic array reconfiguration with a hydrogen energy storage system,”. Energy Convers. Manag. 256, 115376. doi:10.1016/j.enconman.2022.115376
Zhang, X., Yu, T., Xu, Z., and Fan, Z. (2018). “A cyber-physical-social system with parallel learning for distributed energy management of a microgrid,”. Energy 165, 205–221. doi:10.1016/j.energy.2018.09.069
Zhang, X., Tan, T., Yu, T., Yang, B., and Huang, X. (2020). “Bi-objective optimization of real-time AGC dispatch in a performance-based frequency regulation market,” in CSEE Journal of Power and Energy Systems (Beijing, China: CSEE). doi:10.17775/CSEEJPES.2020.01860
Zhang, Z., and Chow, M. (2012). “Convergence analysis of the incremental cost consensus algorithm under different communication network topologies in a smart grid,”. IEEE Trans. power Syst. 27 (4), 1761–1768. doi:10.1109/TPWRS.2012.2188912
Zhao, Z., and Lin, L. (2022). “Application status and prospects of digital twin technology in distribution grid,”. Energy Rep. 8, 14170–14182. doi:10.1016/j.egyr.2022.10.410
Keywords: digital twins, consensus control, distributed optimization, power tracking, physical-model simulation
Citation: Wang Y, Guo Z, Pang Y, Gao K and Zhao J (2023) Consensus control for distributed power tracking by device-level digital twin agents. Front. Energy Res. 11:1133516. doi: 10.3389/fenrg.2023.1133516
Received: 29 December 2022; Accepted: 10 February 2023;
Published: 02 March 2023.
Edited by:
Haixiang Zang, Hohai University, ChinaReviewed by:
Puyu Wang, Nanjing University of Science and Technology, ChinaCopyright © 2023 Wang, Guo, Pang, Gao and Zhao. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Zhimin Guo, R3VvX3poaW1pbjEyM0BvdXRsb29rLmNvbQ==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.