 Lei Yuan
Lei Yuan Hu Chen1
Hu Chen1 Yi Liu
Yi Liu
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Energy Res., 25 January 2023
Sec. Smart Grids
Volume 11 - 2023 | https://doi.org/10.3389/fenrg.2023.1130646
This article is part of the Research TopicCoordination and Control of Power Converters in Modern Power SystemsView all 10 articles
Aiming at the control system of permanent magnet synchronous servo motor which is easily affected by external disturbance and parameter uncertainty, a single neuron sliding mode combining single neuron adaptive algorithm and super-twisting sliding mode (STSM) control is proposed. The STSM control is used to overcome the chattering problem in the traditional sliding mode control, and the proportional control and the STSM control are combined to enhance the robustness of the control system. In order to improve the dynamic performance of the system and enhance the anti-disturbance ability of the system, the single neuron adaptive control adopted can adjust the relevant parameters of the designed sliding mode controller online. The simulation and experimental results show that the designed improved sliding mode controller can effectively suppress the chattering of the control system, realize the fast following and no overshoot of the control system, and enhance the robustness of the system.
In recent years, permanent magnet synchronous motor (PMSM) has received more and more attention with the continuous research and development of the performance of permanent magnet materials and the progress of power electronics technology (Zhang et al., 2019). It is also more widely used in various aspects of national defense, military industry and daily life owing to its high efficiency, simple and reliable structure, small size and low losses (Du et al., 2016; Wang et al., 2019). The control performance of PMSM drive system is greatly influenced by uncertainties such as load variations and parameter perturbations in actual control. Therefore, suitable controllers need to be designed to reduce the impact of these uncertain external factors on the control system while enhancing the system robustness and improving the system control performance.
Some literatures have proposed various control methods for motor control system, such as sliding mode control (Ali et al., 2019; ZHANG and WANG, 2021), neural network control (Wang and Kang, 2019; Wang et al., 2021), adaptive control (Zhao et al., 2017; Asiain and Garrido, 2021), and fuzzy logic control (Wang and Zhu, 2018; Mesloub et al., 2020), et al. Among them, sliding mode control is widely used in PMSM control system due to its advantages of fast response, insensitivity to parameter changes and perturbations, no need for online system identification, and simple physical implementation (Li et al., 2019; Xia and Zhang, 2019). However, in the actual control system, the sliding mode control cannot achieve the ideal switching and when the system is in the sliding mode surface, it will repeatedly cross the sliding mode surface and so on, resulting in the system chattering and making the control system unstable (Wang et al., 2018). The idea of higher-order sliding mode control algorithm has been proposed to solve this problem. super-twisting sliding mode (STSM) control algorithm is a kind of second-order sliding mode control algorithm, and its control signal is continuous and vibration free, which can suppress the system chattering well. However, since it does not give an estimate of the convergence time and the uncertainty bound of the system is difficult to obtain (Sadeghi et al., 2018; Wan et al., 2018), we need to improve it. In (Zhou et al., 2022), a modified sliding mode self-anti-disturbance control is used to improve the dynamic stability performance of the control system. In (Zhou et al., 2019), the overshoot-free fast following of the control system is achieved using internal mode control. The literature (Abdul Zahra and Abdalla, 2021) combines Super-twisting sliding mode control with fuzzy control to weaken the chattering problem and improve the system robustness.
In this paper, a single-neuron control strategy was combined with super-twisting sliding mode control. In addition to the advantages of strong robustness and fast response of sliding mode control, STSM control can achieve high accuracy and fast following of the reference trajectory as well as suppressing the chattering problem of the control system. The single-neuron algorithm is simple and easy to implement for digital controllers. A single-neuron control strategy is combined with STSM control to reduce system chattering problem, improve system robustness and weaken the effect of uncertainties on the system. The controller can also adjust the parameters of the sliding mode controller online to obtain better control effect. The proposed idea was verified by simulation and experiment, and the results show that the proposed method has good control performance.
The following first-order non-linear uncertainty system is considered.
In Formula. 1, The x, u, d(t) are the state variables, controller and uncertain perturbation terms of the system, respectively, and d(t) satisfies d(t) = ∆a∙x+∆b∙u + g(t), where ∆a, ∆b and g(t) are each uncertain terms and external perturbations of the parameters.
The super-twisting algorithm was applied to design a second-order sliding mode controller to improve the robustness of the control system to load and parameter variations and to reduce the system chattering problem. A sliding surface, s, is defined as follows
Where xref is the system reference value.
Super-twisting slide controller was used to ensure that the system reaches the slide surface in a finite amount of time, where the equation is as follows
Where k1, k2 are the gains of the sliding mode controller and satisfy k1 > 0, k2 > 0. Where sgn(s) is a symbolic function and satisfies as follows
The derivative of (2) for the slip surface function and substitution of (1) and (3) can be obtained as follows
To facilitate stability analysis, (5) can be further simplified as follows
where,
Drawing on the Lyapunov function method constructed in (Moreno and Osorio, 2008), the stability analysis of the system shown in Formula. 6 is carried out. Define the state variables as follows
The state variable ξ is derived as follows
The Formula. 8 is further simplified as follows
Where,
For the stability analysis of the control system, the Lyapunov function is defined as follows
where P is a real symmetric positive definite matrix and P is designed as follows.
In order to analyze the system stability, the derivative of Formula. 9 is obtained as follows.
Assume that
Where,
According to Lyapunov stability theorem, if the control system is stable, then (12) should satisfy
The simplified (13) is as follows:
Therefore, under the conditions shown in (14), Q is a real symmetric positive definite matrix. There exists
The proportional control is combined with the super-twisting sliding mode control to further improve the convergence characteristics and dynamic performance of the Super-twisting sliding mode controller. The improved sliding mode controller is as follows
In (15), k3 is the proportional control gain and satisfies k3 > 0.
Comparing (15) and (3), it can be found that the improved sliding mode controller adds a proportional sliding mode term, and a better control effect can be obtained by designing a reasonable gain of k3. Although the controller (15) ensures that the system is in a steady state as long as it meets the design requirements of (13) and k3 > 0, however, the specific values of the controller gains k1, k2 and k3 to meet the design requirements cannot be calculated. This posed some difficulties in designing optimal controller parameters k1, k2 and k3.
Thus, in this paper, we designed an adaptive single-neuron sliding mode controller that can adjust the gain of the sliding mode controller online. The control strategy combines the advantages of both the single neuron control strategy with good adaptive capability and simple algorithm with STSM control theory. The detailed design method of the control algorithm is as follows.
Since the single neuron controller uses digital control, the improved sliding mode controller (15) is discretized using the forward difference method to obtain the incremental controller as follows.
The structure of the single neuron adaptive sliding mode controller is shown in Figure l.
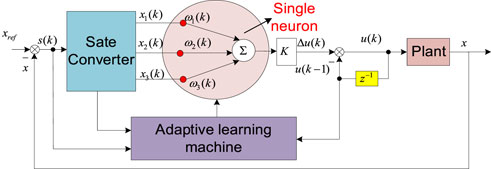
FIGURE 1. Control block diagram of single neuron adaptive sliding mode controller.
It can be seen from Figure 1 that the controller mainly consists of state converter, single neuron and adaptive learning machine, and the working principle of each part will be discussed in the following paper.
Define the output x(k) of the state converter as follows
In (17), s(k) is a sliding mode surface function and is the input of a single neuron.
Based on these inputs, the single neuron can calculate the incremental controller. Thus, (16) can be rewritten as follows:
where K is the gain coefficient of the neuron and satisfies K > 0; ωi (i = 1,2,3) is the weighting coefficient of xi.
From (16) and (17), we have
Define the objective function of the system as J = s(k)2/2 and the adaptive learning algorithm by the gradient law, we make J converge to zero quickly by adjusting the weights ωi(k) along the negative direction of the sliding mode surface of the system makes J converge to zero quickly.
Where
The learning rule for single neuron weights used the modified Hebb learning rule, and the algorithm was obtained after normalization as follows:
Where
To verify the correctness and feasibility of the single-neuron STSM controller proposed in the paper, simulation modeling was performed using Matlab/Simulink simulation software, where the controlled object was a first-order linear system with a transfer function of G(s) = 1000/(s + 1000). In the simulation, the reference value was set to a square wave signal with an amplitude of 100 and a frequency of 100 Hz. The gain coefficient of the neuron was K = 10 and the initial value of the gain of the controller was k1 = 0.2, k2 = 10, k3 = 0.1.
The simulation results are shown in Figures 2, 3.

FIGURE 2. Change curve of reference value and actual value.
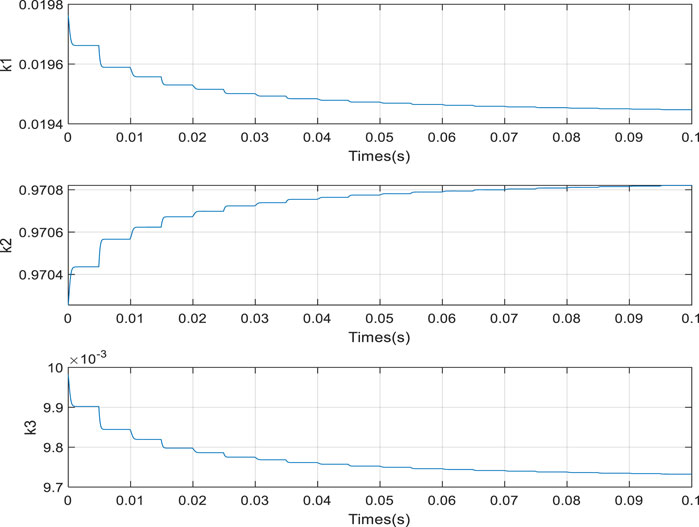
FIGURE 3. The curve of controller parameters k1,k2,k3.
From the simulation results shown in Figure 2, it can be seen that with the single neuron adaptive sliding mode controller, the system output can quickly track the reference value and can achieve overshoot-free operation. The variation curves of controller parameters k1, k2 and k3 are given in Figure 3, and it is obvious from the figure that the single neuron designed in the paper was able to adjust the parameters of the super-twisting sliding mode controller online without manual adjustment, which reduced the workload of parameter adjustment. Figure 4 shows the variation curve of the objective function J. From the figure, it can be seen that the objective function J is 0 at steady state.
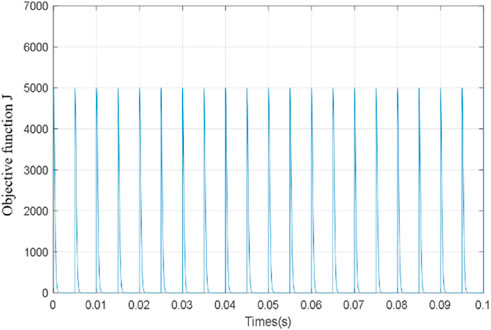
FIGURE 4. The curve of cost function J.
In order to verify the correctness and feasibility of the proposed single neuron super-twisting sliding mode control method, a single neuron super-twisting sliding mode controller for a permanent magnet synchronous servo motor as shown in Figure 5. The control algorithm used a dual closed-loop control strategy of position loop and current loop, where the position loop used the sliding mode control with online adjustment of controller parameters designed in the paper, and the current loop used PI control. In addition, the experimental platform used STM32F405 chip as the controller, and uploaded the experimental data and state variables of servo motor control to the specific experimental platform through CAN bus as shown in Figure 6. This experimental platform was mainly used for the independent development and application research of direct-drive hydraulic servo valve.

FIGURE 5. Control block diagram for single neuron super-twisting sliding mode control for PMSM system.
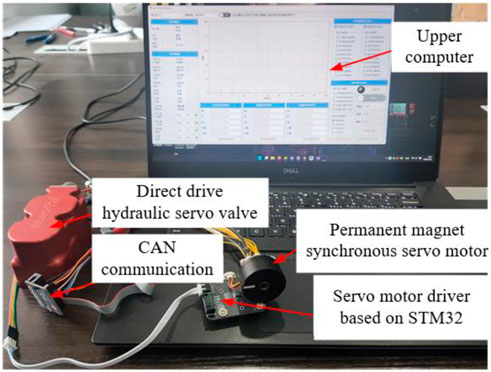
FIGURE 6. Experimental platform of servo motor control.
In addition, the parameters of the PMSM are shown in Table 1, and the position loop PI controller parameters are kpp = 45.5, kip = 15, the current loop PI controller parameters are kpc = 145, kic = 6450. For the proposed single neuron super-twisting sliding mode controller, the gain coefficient of the neuron was K = 150 and the initial value of the gain of the controller was k1 = 6, k2 = 35, k3 = 2.5.
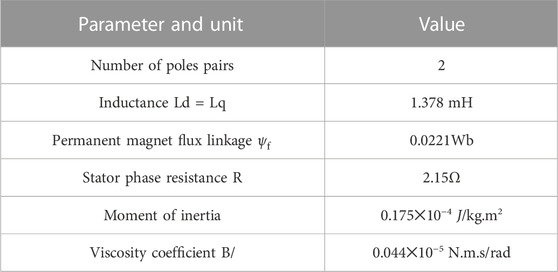
TABLE 1. Parameters of PMSM.
The superiority of the proposed control strategy was verified by comparing the analysis with the PI controller for the position loop, and the operating conditions of the servo motor under the two algorithms were identical, and the experimental data were obtained by the host computer. In addition, square wave and sine wave signals were used as command signals to further illustrate the feasibility of the proposed control algorithm, where the amplitude and frequency of the square wave signal are set to 5° and 15Hz, and the amplitude and frequency of the sine wave signal were set to 5° and 20 Hz, respectively. The experimental results are shown in Figures 7, 8.

FIGURE 7. Experimental results when the reference value is square wave signal. (A) PI control; (B) Single-neuron STSM control.

FIGURE 8. Experimental results when the reference value sine wave signal. (A) PI control; (B) Single-neuron STSM control.
It can be found that under the action of PI control, the actual position of the servo motor can track the reference value with an overshoot of about 4% by comparing and analysing the experimental results under the two control strategies given in Figure 8. On the contrary, the servo motor can operate without overshoot with relatively short regulation time under the action of the sliding mode controller proposed in this paper.
Similarly, it can be found that under the action of PI control, the actual position of the servo motor is limited by the bandwidth of the PI controller, and there is a large static difference when tracking the sine wave signal, and the q-axis current fluctuates more by comparing and analysing the experimental results under the two control strategies given in Figure 8. On the contrary, the sliding mode control strategy proposed in this paper can track the sinusoidal signal better, and the static difference was relatively small, and the q-axis current fluctuation is smaller.
In this paper, a single neuron super-twisting sliding-mode controller was designed based on the control method combining proportional control and super-twisting sliding mode control, using the ability of the single neuron adaptive control algorithm to adjust the controller parameters online. The sliding mode controller designed under this control strategy can realize online adjustment of the controller parameters and had the advantages of simple algorithm, strong robustness, and good chattering suppression effect. The simulation and experimental results demonstrated that the single neuron adaptive control can adjust the parameters of the super-twisting sliding mode controller online and had better dynamic performance and anti-disturbance capability when applied to the servo control system of permanent magnet synchronous motor.
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
The main work of this paper was completed by LY and PW conducted some theoretical derivation, YL was responsible for writing the paper, and HC and AX were responsible for experimental verification.
The work of LY, HC, PW, LY, and AX was supported by the National Defense Key Laboratory Fund Project under Grant 6142217210301, the Doctoral Research Startup Fund of Hubei University of Technology under Grant XJ2021000302, and the Science and technology research project of Hubei Provincial Department of Education under Grant D20221401.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Abdul Zahra, A. K., and Abdalla, T. Y. (2021). Design of fuzzy super twisting sliding mode control scheme for unknown full vehicle active suspension systems using an artificial bee colony optimization algorithm. Asian J. Control 23 (4), 1966–1981. doi:10.1002/asjc.2352
Ali, N., Ur Rehman, A., Alam, W., and Maqsood, H. (2019). Disturbance observer based robust sliding mode control of permanent magnet synchronous motor. J. Electr. Eng. Technol. 14 (6), 2531–2538. doi:10.1007/s42835-019-00256-0
Asiain, E., and Garrido, R. (2021). Anti-Chaos control of a servo system using nonlinear model reference adaptive control. Chaos Solit. Fractals 143, 110581. doi:10.1016/j.chaos.2020.110581
Du, B., Wu, S., Han, S., and Cui, S. (2016). Application of linear active disturbance rejection controller for sensorless control of internal permanent-magnet synchronous motor. IEEE Trans. Industrial Electron. 63 (5), 3019–3027. doi:10.1109/tie.2016.2518123
Li, J., Du, H., Cheng, Y., Wen, G., Chen, X., and Jiang, C. (2019). Position tracking control for permanent magnet linear motor via fast nonsingular terminal sliding mode control. Nonlinear Dy-namics 97 (4), 2595–2605. doi:10.1007/s11071-019-05150-y
Mesloub, H., Benchouia, M. T., Boumaaraf, R., Golea, A., Golea, N., and Becherif, M. (2020). Design and implementation of DTC based on AFLC and PSO of a PMSM. Math. Comput. Simul. 167, 340–355. doi:10.1016/j.matcom.2018.04.010
Moreno, J. A., and Osorio, M. (2008). A lyapunov approach to second-order sliding mode controllers and observers, 2008 47th IEEE conference on decision and control. Cancun, Mexico. IEEE, 2856–2861.
Sadeghi, R., Madani, S. M., Ataei, M., Agha Kashkooli, M. R., and Ademi, S. (2018). Super-twisting sliding mode direct power control of a brushless doubly fed induction generator. IEEE Trans. Industrial Electron. 65, 9147–9156. doi:10.1109/tie.2018.2818672
Wan, D., Zhao, C., and Sun, Q. (2018). SVM-DTC for permanent magnet synchronous motor using second order sliding mode control. EMCA 45 (6), 34–39.
Wang, B., Iwasaki, M., and Yu, J. (2021). Command filtered adaptive backstepping control for dual-motor servo systems with torque disturbance and uncertainties. IEEE Trans. Industrial Electron. 69 (2), 1773–1781. doi:10.1109/tie.2021.3059540
Wang, C., and Zhu, Z. Q. (2018). Fuzzy logic speed controller withadaptive voltage feedback controller of permanent magnet synchronous machine, 2018 XIII Interna-tional conference on electrical machines (ICEM). Valencia, Spain, IEEE, 1524–1530 .
Wang, H., Li, J., Qu, R., Lai, J., Huang, H., and Liu, H. (2018). Study on high efficiency permanent magnet linear synchronous motor for maglev. IEEE Trans. Appl. Supercondu-ctivity 28 (3), 1–5. doi:10.1109/tasc.2018.2796560
Wang, Q., Yu, H., Wang, M., and Qi, X. (2019). An improved sliding mode control using disturbance torque observer for permanent magnet synchronous motor. IEEE Access 7, 36691–36701. doi:10.1109/access.2019.2903439
Wang, S., and Kang, J. (2019). Harmonic extractionand suppression method of permanent magnet synchronous motor based on adaptive linear neural network. Trans. china Electrotech. Soc. 34 (4), 654–663.
Xia, M., and Zhang, T. (2019). Adaptive neural network control for stochastic constrained block structure nonlinear systems with dynamical uncertainties. Int. J. Adapt. Control Signal Process. 33 (7), 1079–1096. doi:10.1002/acs.3010
Zhang, C., Zhang, H., and Ye, P., (2019). Research on sensorless algorithm of two-phase tubular permanent magnet synchronous linear motor. Trans. China Electrotech. Soc. 34 (23), 4901–4908.
Zhang, K., and Wang, L. (2021). Adaptive sliding mo-de position control for permanent linear motor based on periodic disturbance learning. Electr. Mach. Control 25 (8), 132–141.
Zhao, X., Wang, C., and Cheng, H. (2017). Adaptive complementary sliding mode control for permanent magnet linear synchronous motor. Electr. Control 21 (08), 95–100.
Zhou, H., Yu, X., and Liu, G., (2019). Sliding mode speed control for tubular permanent magnet linear motors based on the internalmodel. Proceeding CSEE 11, 3382–3391.
Keywords: permanent magnet synchronous servo motor, single-neuron adaptive algorithm, super-twisting algorithm, sliding mode control, stability analysis
Citation: Yuan L, Chen H, Wang P, Liu Y and Xu A (2023) Design of single neuron super-twisting sliding mode controller for permanent magnet synchronous servo motor. Front. Energy Res. 11:1130646. doi: 10.3389/fenrg.2023.1130646
Received: 23 December 2022; Accepted: 16 January 2023;
Published: 25 January 2023.
Edited by:
Tao Xu, Shandong University, ChinaReviewed by:
Hanyu Wang, Hefei University of Technology, ChinaCopyright © 2023 Yuan, Chen, Wang, Liu and Xu. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Pan Wang, d3AyMDIxMDAxOEBoYnV0LmVkdS5jbg==; Yi Liu, YWFyb25sYXVAd2h1LmVkdS5jbg==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.