 Shuang Shi
Shuang Shi Yanping Wang*
Yanping Wang*
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Energy Res., 13 April 2023
Sec. Smart Grids
Volume 11 - 2023 | https://doi.org/10.3389/fenrg.2023.1119461
This article is part of the Research TopicDistributed Learning, Optimization, and Control Methods for Future Power GridsView all 10 articles
Interconnecting microgrids with similar geographical environment and related characteristics electrically and communicatively, this constitutes a microgrid cluster, which is a higher-level distributed power structure and an effective way to improve the utilization rate of distributed energy and local absorption level. However, the stable operation of microgrid clusters is determined by the cluster structure and its control strategy, which is also the focus and difficulty of current research. To address this challenge, this paper proposes a ring-based multi-agent microgrid cluster energy management strategy, which realizes the centerless coordinated autonomous operation of microgrid clusters with high stability. In addition, based on the multi-agent control strategy, this paper designs a variety of control strategies that can be switched autonomously for different control objectives of the microgrid cluster to realize smooth grid connection and off-grid of the microgrid cluster. Finally, based on Matlab platform simulation, the experimental results show that the control structure and energy management strategy proposed in this paper can realize the centerless coordination and autonomy of the microgrid cluster on the basis of stable operation, minimize the energy interaction between the cluster and the distribution network, and greatly improve the utilization rate and local absorption level of distributed energy.
Microgrid (MG) is the basic component unit of microgrid cluster, so the stability, efficiency and control flexibility of microgrid operation are the basis for realizing microgrid cluster operation. At present, the development of microgrids has been relatively mature, and people have done a lot of work on microgrid operation, control, and protection Joos et al., 2000; Chiradeja and Ramakumar, 2004; Quezada et al., 2006; Hegazy et al., 2003; Hoff and Shugar., 1995; Greatbanks et al., 2003. Which has accelerated the development of microgrid technology. However, the large-scale access of microgrids leads to a large number of bidirectional currents in the distribution network with scattered access points, which brings new problems to voltage regulation, protection coordination and energy optimization Patel et al., 2008. Exploring and developing active distribution technologies for distribution networks is an effective way to solve this problem. On the other hand, how to effectively integrate a large number of microgrids to make them operate autonomously and reduce the impact on the distribution network is the hope and requirement of the distribution network for microgrids and one of the goals of microgrid clustering operation Yao et al., 2021. Microgrid cluster (MGC) is a new structure of distributed power supply in recent years, and relatively little research has been done on MGC at home and abroad, but as a further development trend of coordinated operation of multiple microgrids, its superiority in distributed power integration, flexible control mode, energy utilization efficiency, and support to the distribution microgrid has led to the research on MGC at home and abroad Yao et al., 2023. More and more attention has been paid to the research of MGC both at home and abroad. For example, Qingzhu Wan et al. from the School of Electrical and Control Engineering of Northern Polytechnic University wrote a paper to explain the concept, structure and composition of microgrid clusters Qingzhu and Xue, 2017. The general design of microgrid cluster operation was studied by Jiangmen Power Supply Bureau of Guangdong Power Grid Company and the School of Electronic Information and Electrical Engineering of Shanghai Jiaotong University, which compared the characteristics of microgrid cluster operation with related methods such as coordinated operation of multiple microgrids and single microgrid operation, and discussed the control methods of microgrid cluster operation Cai Dehua et al., 2015. Zhou Xiaoqian et al. from the School of Electronic Information and Electrical Engineering, Shanghai Jiaotong University, proposed local centralized optimization and global optimization methods. A framework of local centralized optimization and global distributed iterative distributed optimization based on consistency and model predictive control theory was proposed, which well solves the large-scale MGC distributed optimization solution problem Zhou et al., 2018a. In addition, the Microgrid Laboratory of Aalborg University, Denmark, has conducted research on integrated modeling of microgrid clusters, multi-timescale energy management of multilayer microgrid clusters, distributed coordinated control and optimization based on coordinated operation of multiple microgrids, and virtual and semi-physical simulations to verify the correctness and effectiveness of the proposed scheme. The stable operation of microgrid clusters depends on the correct design and selection of control strategies, and currently, the main control methods are centralized, decentralized and distributed. Centralized control cannot meet the robustness and flexibility requirements of microgrid clusters due to its own characteristics Karimi et al., 2017; Wei and Xianwei., 2011; Minchala-Avila et al., 2016. Decentralized control achieves stable control of the unit itself through local control methods, and power balancing within and between microgrids can be achieved through reasonably designed control algorithms Nutkani et al., 2016; Divshali et al., 2012. Subsequently, the shortcomings of traditional sag control have been optimized and corresponding control methods for autonomous operation of microgrids have been proposed, providing directions and ideas for the control of microgrid clusters Jin et al., 2010; M. D. Cook et al., 2017; Dou et al., 2015; Gu et al., 2014. However, the decentralized control systems of microgrids are “fragmented”, which makes it difficult for microgrid clusters to support large microgrids. In recent years, the application of distributed control theory in power systems has gradually gained attention, and the resulting distributed control of microgrids has been gradually developed. The distributed control approach not only has high flexibility, immunity and ability to resist cyber security threats, but also can provide strong technical support to the microgrid, so distributed control is particularly suitable for microgrid clusters Han et al., 2019. Under the distributed control architecture, various optimal control methods have been proposed for different control objects and optimization objectives, such as autonomous coordinated control strategies for clusters with multiple AC-multiple DC microgrids Zhou et al. (2018b), hierarchical cluster control schemes for islanded DC microgrid clusters Luo et al., 2018, and distributed hierarchical cooperative control strategies for islanded microgrid clusters with intermittent communication Li et al., 2019, and simulation verified the effectiveness of the control strategy. During the research of microgrid cluster control strategies, the time scale of cluster energy management, dynamic characteristics of cluster operation, communication delays, the impact of microgrid plugging and unplugging on communication links, line loss and economy, and topology optimization have also been discussed and solutions have been proposed Xing et al., 2017; Z. Zhao et al., 2017; Han et al., 2018; Han et al., 2017; Zhou et al., 2017. However, the existing cluster topologies and their distributed algorithms are still largely based on the instructions issued by the high-level controller or the dominant node, and do not operate autonomously without a control center in the real sense.
The shortage of energy resources and ecological degradation have led to the development of photovoltaic and wind power generation, but a single microgrid is no longer able to meet the needs of users. Therefore, an effective solution to directly dispatch and manage a large number of distributed generators in the distribution network is to centralize distributed power sources into a microgrid cluster. A microgrid cluster is formed by interconnecting microgrids with similar geography and related characteristics electrically and communicatively and interacting with the distribution microgrid through a unique access point, which is a higher-level distributed power architecture. In this paper, a ring-shaped distributed microgrid cluster structure is proposed. In this structure, distributed control systems with integrated communication modules are distributed in each microgrid unit in a ring link, and the microgrid only interacts with neighboring microgrids to obtain current status information and user information of other microgrids in the cluster. When the cluster is operating, each distributed control system (agent) can simultaneously solve the next operation plan of the cluster, in addition to maintaining the stable operation within the microgrid. Therefore, each distributed control system is both the control center of each microgrid unit and the control center at the cluster level, completely eliminating the need for a centralized dispatch center and dominant node. This fully distributed control strategy can greatly improve the stability and robustness of cluster operation and finally realize autonomous operation without central coordination, which has important theoretical research significance and application promotion value. Through simulations and experiments, we demonstrate that our approach can improve the reliability, stability, and efficiency of microgrid operation while reducing the dependence on the main power grid. Our approach utilizes real-time dynamic compensation control, which can adapt to changing conditions in the microgrid more quickly. We also show that our approach can effectively balance the power generation and demand of the microgrid by integrating a smart agent-based control system and using energy storage devices such as batteries and supercapacitors. Our results suggest that our approach could be a promising solution for the large-scale deployment of renewable energy microgrids in the future.
As a more complex form of distributed power structure, microgrid clusters will present the following new features: each micro power source within the cluster can independently meet the power demand of each microgrid load in the islanded state; when there is a microgrid that cannot meet the load power demand, the cluster networking state can be carried out to share the surplus power of the respective microgrid and the power in energy storage through energy interaction. When the overall power of the cluster is insufficient or the energy storage equipment is surplus, flexible automatic load shedding can be carried out at the level of meeting the self-sufficiency rate of the cluster, or feedback or request for power supply to the distribution network through the public coupling point (PCC). The above features greatly enhance the flexibility of cluster operation. The increased degree of autonomy of microgrid clusters will allow more active control, since the topology of the cluster will be determined to some extent by the interactions between the microgrids. We present the cluster operation of microgrids and its superiority. The cluster structure and its operational control strategy determine the stability of the system and the utilization of distributed energy, while the realization of the autonomous operation goal determines the magnitude of the support role for the distribution microgrid. In the existing microgrid secondary control, the main control objectives are voltage and frequency recovery, SOC equalization, etc., Ma et al., 2022; Deng et al., 2022. In the control proposed in this paper, the control objective of the multi-agent system is to adjust the control mode and static switching state of the energy storage unit according to the operating status of each microgrid to ensure that all microgrids can operate stably. For example, when a microgrid cannot operate autonomously because the battery SOC reaches the constraint condition, another microgrid is selected to interconnect with this microgrid through the two-layer multi-agent system and the energy storage units of other microgrids are used to maintain the power balance and ensure stable operation.
In this paper, a ring distributed autonomous system structure and its control strategy are proposed, i.e., a ring structure is used to connect microgrid clusters to the microgrid, a solution for smooth microgrid connection of microgrid clusters and coordinated autonomy of each microgrid is proposed, and a multi-agent system (MAS) based energy management method for microgrid clusters is proposed. The schematic diagram of the microgrid cluster model is shown in Figure 1.

FIGURE 1. Schematic diagram of microgrid cluster model.
The multi-agent system used in this paper is a distributed control system composed of agents in which the agents communicate with each other to coordinate and control the microgrid cluster and the state of each microgrid according to certain rules, using a distributed approach to problem solving. Each agent integrates a communication module and forms a ring link in which it is connected to the microgrid and in which distributed control algorithms are embedded. Typically, each agent is interconnected with its neighboring agents and interacts with information through a control policy developed within the agent. The proposed cyclic agent architecture allows neighboring agents to communicate with each other, and the agent is used for energy management of the microgrid cluster, and the cyclic structure of the agent is used to reasonably allocate energy storage and achieve dynamic energy compensation among sub-microgrids. Second, starting from the actual microgrid connection, the control strategy of the sub-microgrids is converted to include pre-synchronization control to enable smooth microgrid connection of the microgrid clusters at the PCC.
Before studying the control of microgrid clusters, the control of single microgrid should be considered first, then study the control of single microgrid using agent system, which is important to study the stability of microgrid clusters.
In this paper, the master-slave control strategy is used for a single microgrid. As power terminals, the PV and wind generation units are mainly controlled with maximum power tracking to maximize the utilization of wind and solar energy. Similarly, in grid-connected operation mode, energy storage also acts as a power terminal, receiving power commands from the upper-level dispatch system for constant power control (PQ) charging and discharging. However, as a balancing terminal, the energy storage device uses constant voltage and constant frequency (V/f) control to maintain stable AC bus voltage and frequency under island operation mode conditions. The operation mode and static switching of each microgrid is controlled by a multi-agent system. The control structure diagram of the microgrid master-slave inverter is shown in Figure 2.
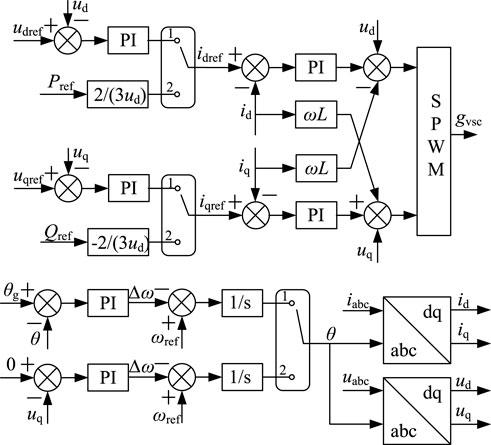
FIGURE 2. The control structure diagram of microgrid master control unit.
As shown in Figure 2, udref and uqref are reference values of the d-axis and q-axis PCC voltage, respectively; idref and iqref are reference values of the d-axis and q-axis grid-connected current, respectively; uabc is three-phase PCC voltage; uabc is three-phase grid-connected current; ωref is rated reference value of fundamental angular frequency; θ is phase information of PCC voltage; θg is phase information of grid-connected voltage; △ ω is variation of fundamental angular frequency.
As shown in Figure 2, in grid-connected operation mode, the control objective of the energy storage system is to track the power command, so PQ control is used. d-axis and q-axis current references are generated from the power command and d-axis voltage, and phase information is obtained from the phase-locked loop (PLL). In islanded operation, the microgrid loses the support of grid voltage and frequency, and if constant power control is still used, when the inverter output power does not match the load power. It will cause fluctuation of system voltage and frequency, resulting in system instability. Therefore, in the islanding mode, the main inverter of the microgrid needs to assume the role of voltage and frequency regulation and adjust its own output power according to the load demand. In the islanding mode of operation, the current reference values for the d and q axes are generated by the PI regulator of the outer voltage loop. In the inner current loop, decoupling and voltage feedforward control are also considered. In addition, pre-synchronization control needs to be considered when the microgrid is switched from islanding mode to grid-connected mode. The purpose is to achieve phase alignment on both sides of the static switch before switching, thus reducing the voltage/current impact caused during the switching process.
The topology structure of voltage source grid connected inverter is shown in Figure 3. In dq two-phase synchronous rotating reference frame, the mathematical model of grid connected inverter can be expressed as follows
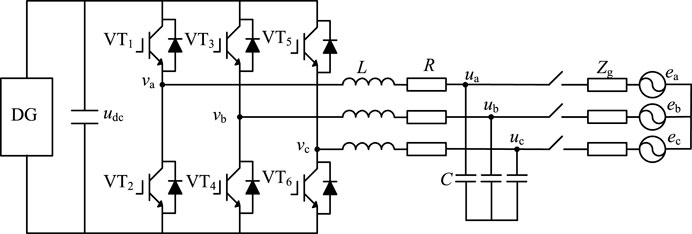
FIGURE 3. The topology structure of voltage source grid connected inverter.
Where L is filter inductance; R is the parasitic resistance of the filter inductance; ω is fundamental angular frequency; id and iq are the d-axis and q-axis components of grid connected current; ud and uq are the d-axis and q-axis components of point of common coupling (PCC) voltage; vd and vq are the d-axis and q-axis components of converter terminal voltage. The active power and reactive power can be expressed as follows
In grid-connected operation mode, PCC voltage is considered constant, so the current reference value can be expressed as follows
Where Pref and Qref are reference values of active and reactive power, respectively. In island operation mode, voltage closed-loop control is used to maintain constant voltage and frequency of AC bus, so the current reference value can be expressed as follows
where udref and uqref are reference values of the d-axis and q-axis voltage, respectively; kvp and kvi are proportional and integral coefficients of PI regulator, respectively.
The single microgrid control strategy is verified by Matlab platform and the simulation results are shown in Figure 4.
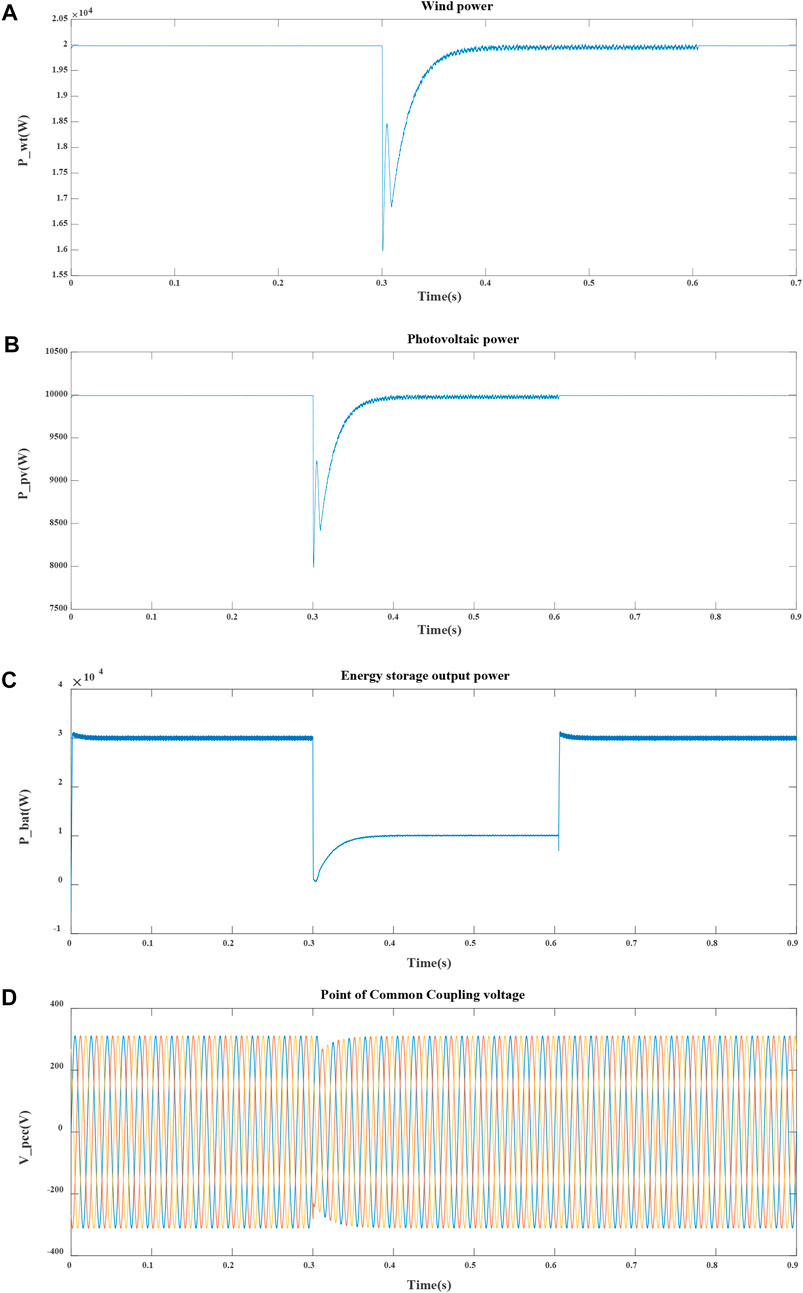
FIGURE 4. Single microgrid simulation results.
The results show that: the microgrid operates grid-connected at 0
Several microgrids are electrically interconnected according to geography or type to form microgrid clusters. The transmission of microgrid status information and control signals depends on an efficient and reliable communication network, while effective prediction of uncertainty in distributed power sources and loads is a prerequisite for inter-microgrid energy dispatch. First, individual microgrids are established, and then all microgrids of the same type are electrically and communicatively interconnected according to the microgrid type to form a microgrid cluster. When the cluster is operating, each distributed control system synchronizes to solve the next operation plan of the cluster, in addition to maintaining the stable operation within the microgrid. Therefore, each distributed control system (agent) is both the control center of each microgrid unit and the control center at the cluster level, completely eliminating the need for a centralized dispatch center and a dominant node. Based on the idea of multi-agent controller, an agent-based control strategy for microgrid cluster ring network is proposed. This control strategy mainly consists of the communication network of agents and multiple microgrids, in which agents communicate with each other to form a communication network. The microgrid consists of distributed photovoltaic power generation, wind power generation, energy storage modules and loads. The overall structure is shown in Figure 5. The line between two agents in the Figure indicates the communication interconnection, and the direction of arrow indicates the direction of information transfer; The dotted line between agent and MG indicates their connection, mainly the information upload of MG and the command sending of agent system; The solid line between MG and MG indicates the electrical interconnection, which can carry out energy transfer, and the arrow indicates its direction.Each microgrid is equipped with an intelligent body (agent). It is responsible for collecting the current state of charge (SoC) and calculating the difference between the airflow and the power required by the user. It is also responsible for exchanging the current power error values with the connected agents and comparing the upper and lower limits of the SoC in order to issue the best control commands according to the control rules. Each agent interacts only with connected agents, and this ring network structure minimizes communication delays.
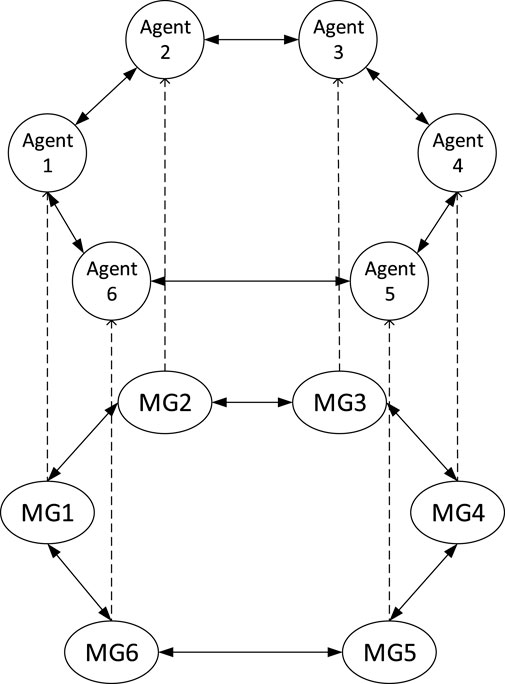
FIGURE 5. Microgrid cluster control model for ring networks.
Remark 1, This ring distributed architecture proposed in this paper achieves the goal of centerless energy coordination and autonomy by eliminating the influence of the central controller and the dominant agent at the cluster level, and reduces the impact of communication failures on the system. This distributed ring structure greatly improves the robustness of microgrid clusters.
a) Reasonable design of control strategy. The stability of operation is built on the basis of intra-cluster power balance, so the power shortage and excess of each microgrid needs to be reasonably matched and scheduled. Under the fully distributed control architecture, we propose a real-time dynamic compensation control strategy: The control system calculates the power difference of the microgrid in the next operation step based on the power generation measurement and customer power consumption information, and performs inter-grid power scheduling on the basis of ensuring its own stable operation. In addition, the control objective of the autonomous operation of this project requires that when the total power difference of the cluster is less than zero, the decision to connect to the grid is made according to the self-sufficiency rate set by the cluster.
b) For the control strategy adopted in this project, autonomous operation without central coordination requires that when the distributed control system is given global information, it is able to synchronize the real-time dynamic compensation schemes of the clusters and then, after the schemes are completed, verify their consistency. Therefore, in addition to synchronizing the clocks, the start and end times of the solving process should be set in the system. If the solution results are inconsistent, the above solution and verification process should be repeated until convergence, and the number of repetitions should be adjusted according to the cluster operation parameters. Under the fully distributed control architecture, the above control strategy and synchronous solving algorithm will eliminate the need for dominant nodes and central controllers to realize the centerless autonomous operation of the microgrid cluster.
In order to maintain the energy balance of microgrid clusters for coordination and autonomy, it is necessary to eliminate the prediction errors. In this paper, a real-time dynamic compensation control strategy is proposed for the error between the actual data of each microgrid unit and the customer demand data. The power error is represented as follows
where, i represents the i microgrid,
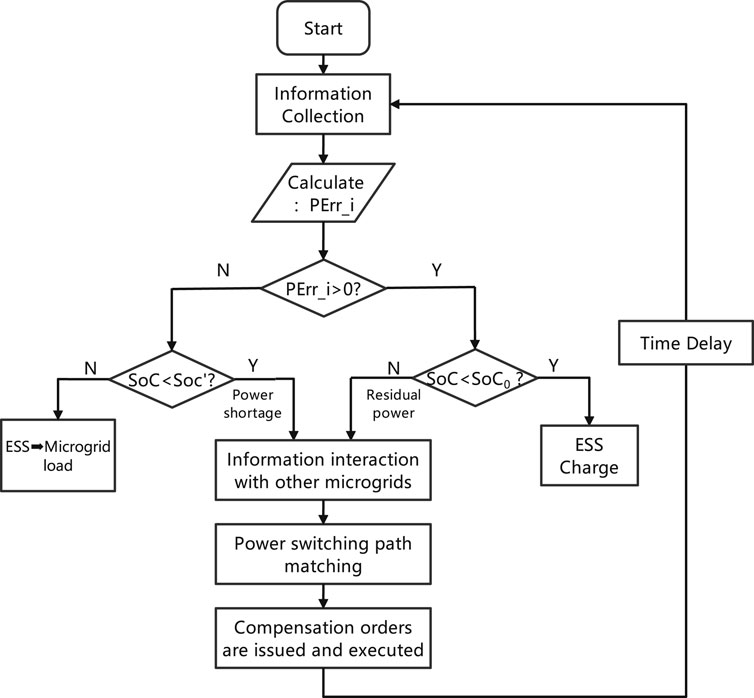
FIGURE 6. Real-time dynamic compensation control strategy flow chart.
The detailed steps of the real-time dynamic compensation control strategy are as follows.
Step 1: Calculate all the
Step 2: Based on the collected SoC value, determine whether the energy storage has reached the constrained state (SoC’ is the lower limit, SoC0 is the upper limit), and output the state (SWBES1 ∼ SWBES6, MG1state ∼ MG1state) as 1 if the constraint is reached, and 0 if the constraint is not reached.
Step 3: The agent system calculates the states of Pstate1 ∼ Pstate6 in step 1 and SWBES1 ∼ SWBES6 in step 2 to obtain the state ordering of the microgrid sequence numbers and SoC values that require energy mutualization.
Step 4: Energy exchange path matching is performed based on the sequence number and the ranking of SoC states of the microgrids that need energy interaction obtained in step 3. Microgrids that do not participate in energy interaction continue to operate in isolation. If the cluster cannot operate autonomously, they enter the grid smoothly through PCC.Remark 2, in order to enable the cluster to meet the load demand value through energy management, to achieve avoid the ESS not to meet the user demand when the actual output power of Photovoltaic and wind is small. The real-time dynamic compensation control strategy is proposed in this paper. It is worth stating that the dynamic compensation scheme includes two aspects. 1) Energy scheduling between distributed power sources, energy storage devices and loads within the microgrid. 2) Energy scheduling between microgrids. In the energy scheduling of microgrid clusters, the power deficit and surplus of each microgrid should be correctly matched.
The following is an example of six microgrids, MG1, MG2, MG3, MG4, MG5, and MG6, whose microgrid structures all choose PV power generation, wind turbines, load and energy storage systems, and the busbar chooses AC busbar. When the ring-type microgrid cluster control strategy is adopted, the power coordination autonomy of the cluster can be realized, and the overall simulation diagram is shown in Figure 7. The following is the simulation model built with Matlab, and the results show the power generation, SoC value, energy storage output power, and grid connection current of each microgrid. It proves the effectiveness of the control strategy in this paper.
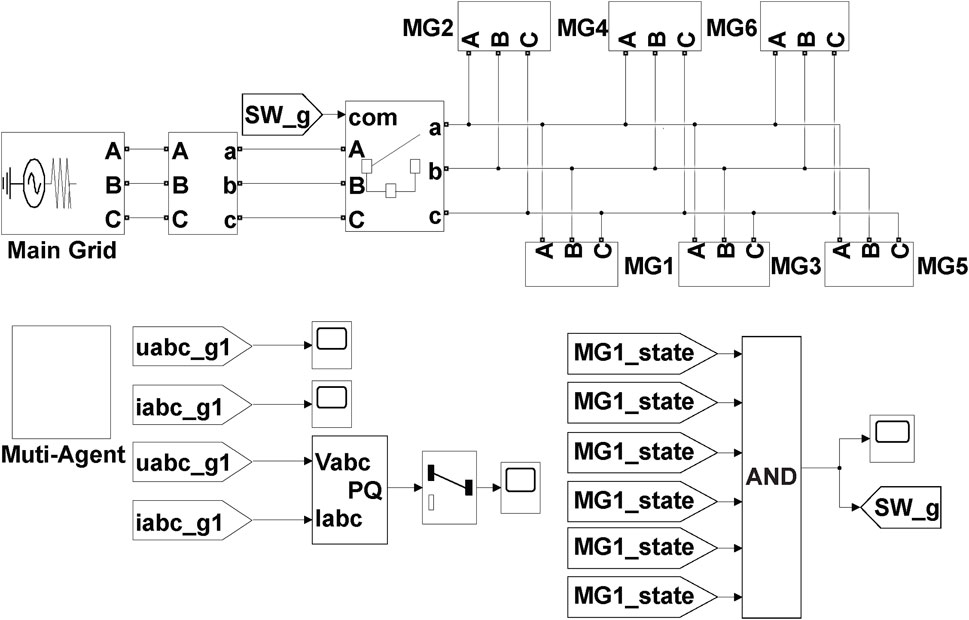
FIGURE 7. Microgrid cluster overall simulation diagram.
The simulation time is set to 2.3s, and the initial SoC values of all six microgrids are close to the upper limit, which is specified to be 80%, and the SoC value of MG5 is the smallest, and the
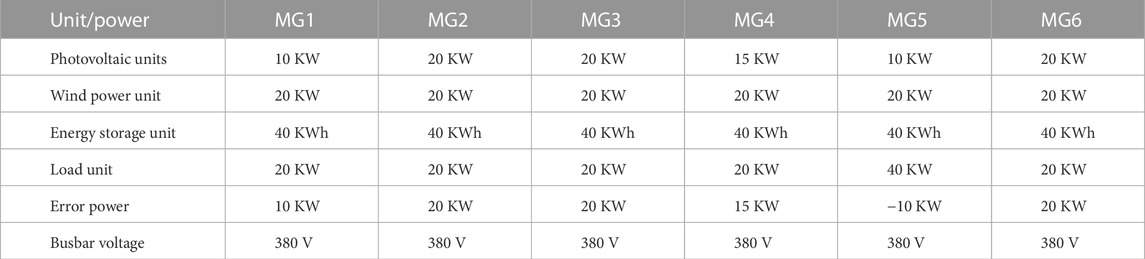
TABLE 1. Margin specifications.
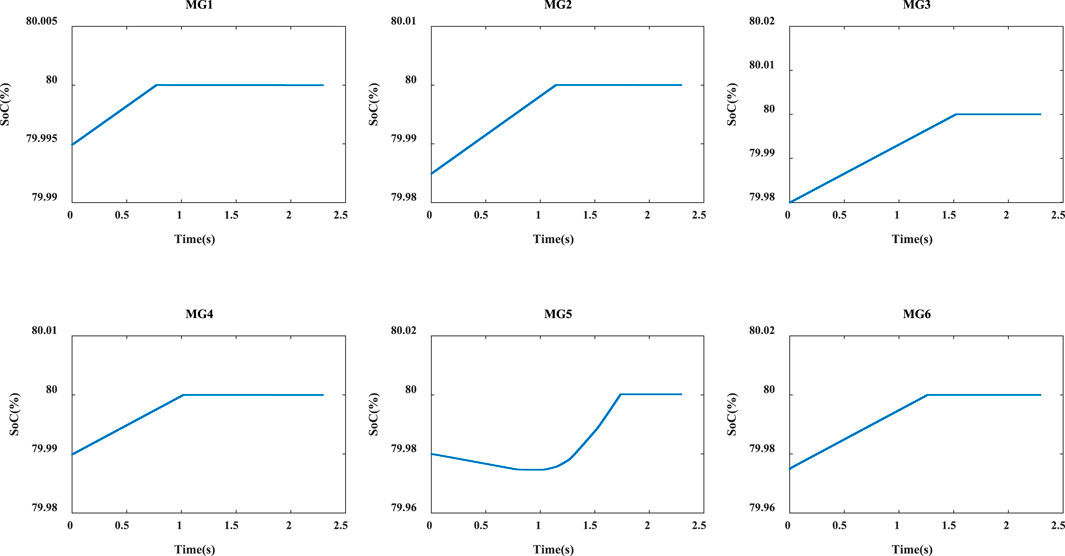
FIGURE 8. Soc value of each microgrid.
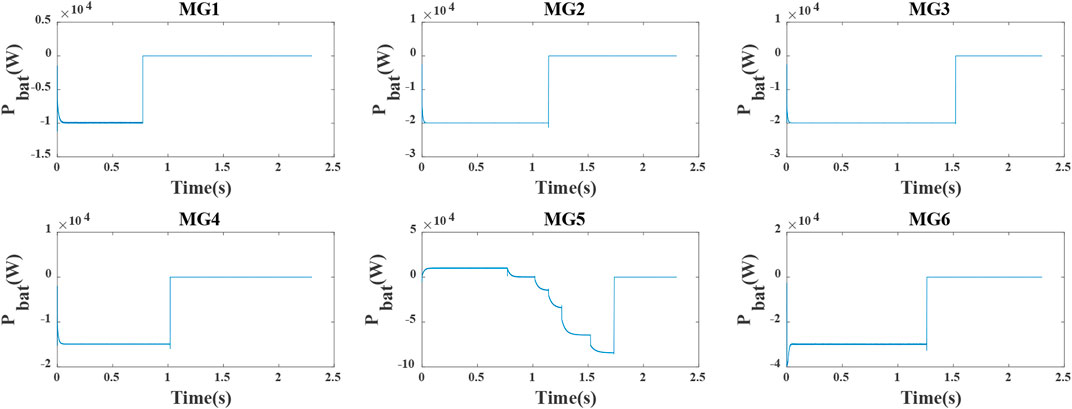
FIGURE 9. Energy storage output power of each microgrid.
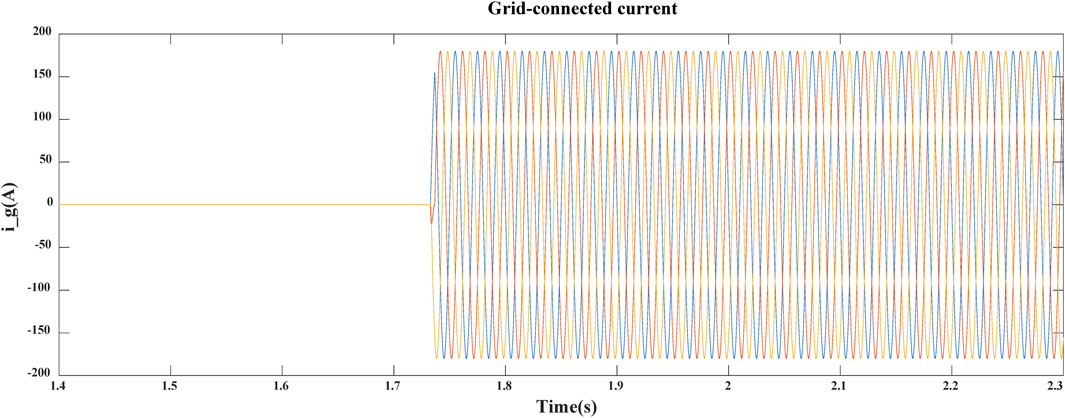
FIGURE 10. Cluster grid-connected current.
From the above simulation results, under the initial conditions, the energy storage SoC values of MG1-MG6 are close to the upper limit, when the power excess comes to verify whether the cluster can share by itself. From the data in the table, we can see that only the
The initial SoC values for all six microgrids were close to the lower limit, specified as 80%, and the maximum SoC value was observed for MG2, with an
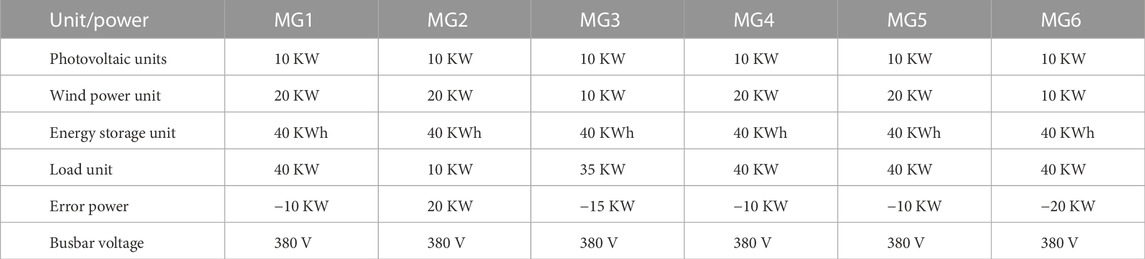
TABLE 2. Power of each unit.
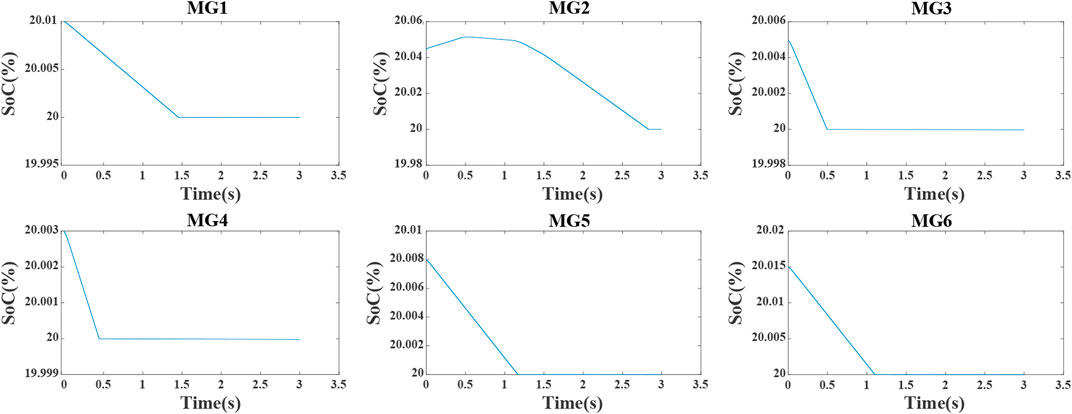
FIGURE 11. SoC value of each microgrid.
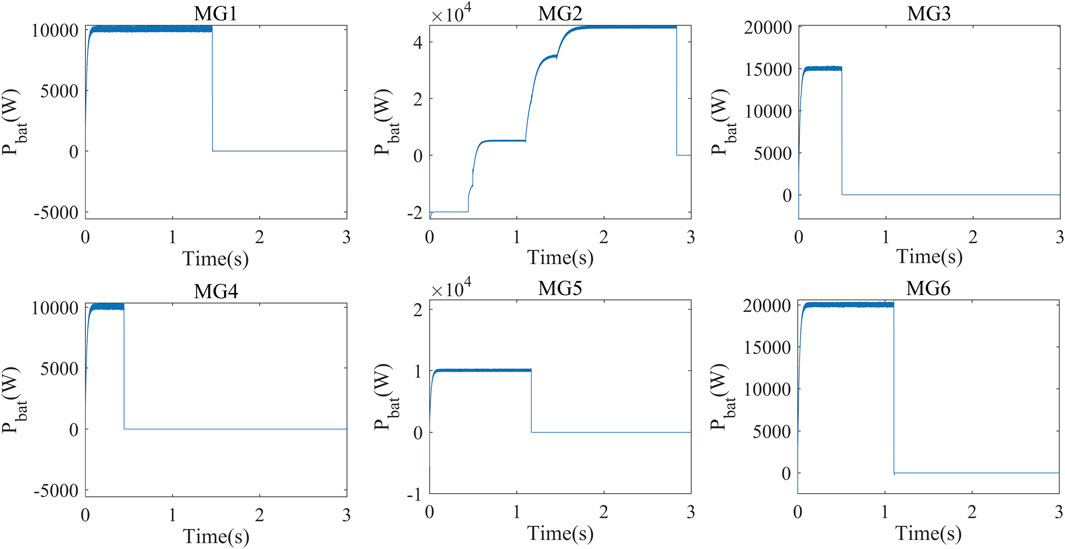
FIGURE 12. Energy storage output power of each microgrid.
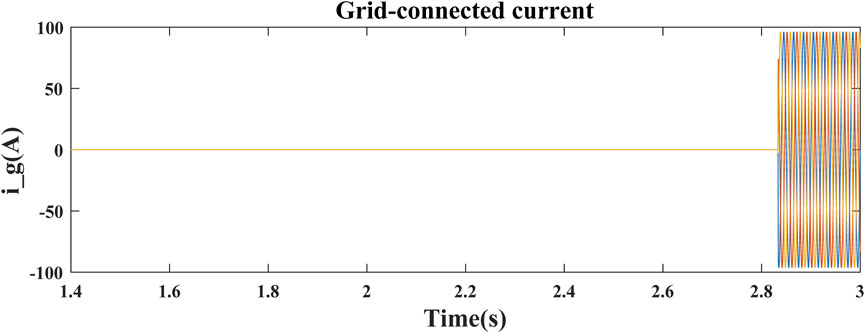
FIGURE 13. Cluster grid-connected current.
From the above simulation results, only the
This paper presents a centerless energy management control strategy for microgrid clusters. Centerless control is not the absence of a control center, but a control center for each microgrid distributed control system, which can simultaneously obtain information about the current status of all microgrids in the cluster and simultaneously resolve the next operation plan of the cluster. This greatly reduces the possibility of system collapse due to control center, dominant node or individual communication line failure, thus improving the robustness and autonomous operation of the system. Selection of PQ control and V/f control strategies in individual microgrids. In this paper, different operation modes are used for different operating conditions, based on the values of
The original contributions presented in the study are included in the article/supplementary materials, further inquiries can be directed to the corresponding author.
Authors SS and YW came up with this idea. The author SS developed this theory and calculations and simulations. Author SS was helpful in validating the analytical method. YW and JJ supervised and reviewed this work. All authors discussed the results and contributed to the final manuscript.
The authors acknowledge financial support from the Natural Science Foundation of Educational Department of Liaoning Province (Grant: J2020053), and Technology Innovation Fund (Grant: 2020JJ26GX029) and would like to express many thanks to the support of Dalian Key Laboratory of Smart Micro-grid and Green Recycling Industry.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Cai Dehua, W. L. L. H. W. P., He, X., and Qian, A. (2015). “Design and Realization of cluster operation model for multi-microgrids in interconnection network,” in Electrical and energy efficiency management technology, 64–71.
Chiradeja, P., and Ramakumar, R. (2004). An approach to quantify the technical benefits of distributed generation. IEEE Trans. Energy Convers. 19, 764–773. doi:10.1109/TEC.2004.827704
Cook, M. D., Robinett, R. D., Parker, G. G., and Weaver, W. W. (2017). Decentralized mode-adaptive guidance and control for dc microgrid. IEEE Trans. Power Deliv. 32, 263–271. doi:10.1109/TPWRD.2016.2583384
Deng, C., Guo, F., Wen, C., Yue, D., and Wang, Y. (2022). Distributed resilient secondary control for dc microgrids against heterogeneous communication delays and dos attacks. IEEE Trans. Industrial Electron. 69, 11560–11568. doi:10.1109/TIE.2021.3120492
Divshali, P. H., Alimardani, A., Hosseinian, S. H., and Abedi, M. (2012). Decentralized cooperative control strategy of microsources for stabilizing autonomous vsc-based microgrids. IEEE Trans. Power Syst. 27, 1949–1959. doi:10.1109/TPWRS.2012.2188914
Dou, C., Lv, M., Zhao, T., Ji, Y., and Li, H. (2015). Decentralised coordinated control of microgrid based on multi-agent system. IET Generation, Transm. Distribution 9, 2474–2484. doi:10.1049/iet-gtd.2015.0397
Greatbanks, J., Popovic, D., Begovic, M., Pregelj, A., and Green, T. (2003). “On optimization for security and reliability of power systems with distributed generation,” in 2003 IEEE bologna power tech conference proceedings (IEEE), 1, 8.
Gu, Y., Xiang, X., Li, W., and He, X. (2014). Mode-adaptive decentralized control for renewable dc microgrid with enhanced reliability and flexibility. IEEE Trans. Power Electron. 29, 5072–5080. doi:10.1109/TPEL.2013.2294204
Han, R., Tucci, M., Martinelli, A., Guerrero, J. M., and Ferrari-Trecate, G. (2019). Stability analysis of primary plug-and-play and secondary leader-based controllers for dc microgrid clusters. IEEE Trans. Power Syst. 34, 1780–1800. doi:10.1109/TPWRS.2018.2884876
Han, Y., Li, H., Coeldo, E. A. A., Zhang, K., and Guerrero, J. M. (2017). Plug-in and plug-out dispatch optimization in microgrid clusters based on flexible communication. J. Mod. Power Syst. Clean Energy 5, 663–670. doi:10.1007/s40565-016-0235-2
Han, Y., Zhang, K., Coelho, E. A. A., Li, H., and Guerrero, J. M. (2018). Mas-based distributed coordinated control and optimization in microgrid and microgrid clusters: A comprehensive overview. IEEE Trans. Power Electron. 33, 6488–6508. doi:10.1109/TPEL.2017.2761438
Hegazy, Y., Salama, M., and Chikhani, A. (2003). Adequacy assessment of distributed generation systems using Monte Carlo simulation. IEEE Trans. Power Syst. 18, 48–52. doi:10.1109/TPWRS.2002.807044
Hoff, T., and Shugar, D. S. (1995). The value of grid-support photovoltaics in reducing distribution system losses. IEEE Trans. Energy Convers. 10, 569–576. doi:10.1109/60.464884
Jin, C., Loh, P. C., Wang, P., Mi, Y., and Blaabjerg, F. (2010). “Autonomous operation of hybrid ac-dc microgrids,” in 2010 IEEE international conference on sustainable energy technologies (ICSET) (IEEE), 1–7.
Joos, G., Ooi, B., McGillis, D., Galiana, F., and Marceau, R. (2000). “The potential of distributed generation to provide ancillary services,” in 2000 power engineering society summer meeting (cat. no. 00ch37134) (IEEE), 1762–1767.
Karimi, M., Wall, P., Mokhlis, H., and Terzija, V. (2017). A new centralized adaptive underfrequency load shedding controller for microgrids based on a distribution state estimator. IEEE Trans. Power Deliv. 32, 370–380. doi:10.1109/TPWRD.2016.2594866
Li, Y., Dong, P., Liu, M., and Yang, G. (2019). A distributed coordination control based on finite-time consensus algorithm for a cluster of dc microgrids. IEEE Trans. Power Syst. 34, 2205–2215. doi:10.1109/TPWRS.2018.2878769
Luo, Z., Geng, H., and Zhu, G. (2018). “Hierarchical cooperative control for islanded dc microgrid cluster - note: Sub-titles are not captured in xplore and should not be used,” in 2018 IEEE international power electronics and application conference and exposition (PEAC) (IEEE), 1–5.
Ma, Y.-S., Che, W.-W., Deng, C., and Wu, Z.-G. (2022). Observer-based fully distributed containment control for mass subject to dos attacks. IEEE Trans. Syst. Man, Cybern. Syst. 1, 897–907. doi:10.1109/TSMC.2022.3189092
Minchala-Avila, L. I., Garza-Castañon, L., Zhang, Y., and Ferrer, H. J. A. (2016). Optimal energy management for stable operation of an islanded microgrid. IEEE Trans. Industrial Inf. 12, 1361–1370. doi:10.1109/TII.2016.2569525
Nutkani, I. U., Loh, P. C., Wang, P., and Blaabjerg, F. (2016). Linear decentralized power sharing schemes for economic operation of ac microgrids. IEEE Trans. Industrial Electron. 63, 225–234. doi:10.1109/TIE.2015.2472361
Patel, D., Varma, R. K., and Seethapathy, R. (2008). Impact assessment of distributed generation on medium voltage distribution systems of hydro one networks inc.
Qingzhu, W., and Xue, C. (2017). The new progress in technology of regional microgrids cluster. J. Electr. Eng. 12, 53–59.
Quezada, V., Abbad, J. R., and Roman, T. G. S. (2006). Assessment of energy distribution losses for increasing penetration of distributed generation. IEEE Trans. Power Syst. 21, 533–540. doi:10.1109/TPWRS.2006.873115
Wei, Z. Y., and Xianwei, L. (2011). Research on micro-grid centralized control strategy based on active power vacancy. Power Syst. Prot. Control 39, 106–111.
Xing, X., Meng, H., Xie, L., Li, P., Toledo, S., Zhang, Y., et al. (2017). “Multi-time-scales energy management for grid-on multi-layer microgrids cluster,” in 2017 IEEE southern power electronics conference (SPEC) (IEEE), 1–6.
Yao, W., Wang, Y., Xu, Y., and Dong, C. (2023). Small-signal stability analysis and lead-lag compensation control for dc networked-microgrid under multiple time delays. IEEE Trans. Power Syst. 38, 921–933. doi:10.1109/TPWRS.2022.3169821
Yao, W., Wang, Y., Xu, Y., Lin, P., Qi, Y., and Wu, Q. (2021). Distributed layered control and stability analysis of islanded networked-microgrids. Int. J. Electr. Power & Energy Syst. 129, 106889. doi:10.1016/j.ijepes.2021.106889
Zhao, Z., Yuewu, W., Xu, Z., Yang, P., and Guerrero, J. M. (2017). Dynamic characteristics analysis and stabilization of pv-based multiple microgrid clusters. IEEE Trans. Smart Grid 10, 805–818. doi:10.1109/TSG.2017.2752640
Zhou, X., Ai, Q., and Hao, W. (2018a). Distributed optimal microgrid cluster scheduling with plug and play function. Automation Electr. Power Syst. 42, 106–113. doi:10.7500/AEPS20170919005
Zhou, X., Ai, Q., and Wang, H. (2017). Adaptive marginal costs-based distributed economic control of microgrid clusters considering line loss. Energies 10, 2071. doi:10.3390/en10122071
Keywords: microgrid clustering, energy management, multi-agent, coordinated autonomy, centerless
Citation: Shi S, Wang Y and Jin J (2023) Multi-agent-based control strategy for centerless energy management in microgrid clusters. Front. Energy Res. 11:1119461. doi: 10.3389/fenrg.2023.1119461
Received: 08 December 2022; Accepted: 29 March 2023;
Published: 13 April 2023.
Edited by:
Chao Deng, Nanjing University of Posts and Telecommunications, ChinaReviewed by:
Yao Weitao, Nanyang Technological University, SingaporeCopyright © 2023 Shi, Wang and Jin. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yanping Wang, d2FuZ3lwQGRscHUuZWR1LmNu
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.