 Yujie Wang1
Yujie Wang1 Peipei Wang
Peipei Wang- 1School of International Education, Wuhan University of Technology, Hubei, China
- 2School of Automation, Wuhan University of Technology, Hubei, China
For the vehicle-to-grid system, the dynamic performance of the vehicle in the transportation system is quite crucial. The stability of the vehicle is the basis of the whole system. Compared to the traditional vehicle, the vehicle with a torque distribution system allows the vehicle to have a better dynamic performance. The torque distribution method has attracted a lot of attention from researchers. Most of the current work focuses on the vehicle on the concrete road. To improve the vehicle lateral stability in the critical work condition, the nonlinear reference model and vehicle dynamic model with 8 degrees of freedom are established based on the vehicle dynamic theory. An integrated active front steering (AFS) and direct yaw control (DYC) controller are designed based on LQR (Linear quadratic regulator) and vehicle stability phase portrait. To evaluate the performance of the vehicle on the road with a relatively low adhesion coefficient. The double lane-change and fishhook maneuver are chosen as the work condition. The steering angle, wheel torque, vehicle routine, phase portrait track, and yaw rate are calculated and compared. The simulation result validates the effectiveness of the proposed integrated AFS and DYC control method. The stability of the vehicle on the low adhesion coefficient road can lay a good foundation of the vehicle-to-grid system.
Introduction
The Electric vehicle (EV) shows a promising future due to its advantage in energy conservation and environment protection. The EV with wheel motors has superior performance in advanced chassis control algorithms because of its simplified chassis and independent driving torque. The independent driving torque on the vehicle wheels allows the vehicle to have a better ability on torque vectoring (TV) control. The TV control can improve the dynamic performance of the vehicle according to the driver’s attention without significantly damaging its speed.
Normally, the TV or differential braking control (DBC) is integrated with the traditional steering system to improve vehicle performance (Soares et al., 2018) (Chen et al., 2017). Based on the coordination of active front steering (AFS), direct yaw control (DYC), and TV control, an integrated control algorithm is provided to maintain the vehicle stability during extreme work conditions (Aouadj et al., 2020); (Li et al., 2019). Besides lateral stability, some researchers also consider roll stability, the TV control is combined with the AFS to enhance the yaw and roll stability of a coach (Zheng et al., 2018). Usually, the torque control distribution algorithm is made up of 2 or 3 layers (Khalfaoui et al., 2018). The stability judgment, slip rate calculation, torque allocation, and steering angle are determined in the upper layer, while the lower layer conducts the torque inverting. The plane phase method can represent the nonlinear characteristics, therefore, it is widely used in vehicle stability judgment. The plane phase method can be classified according to the state variable used in the plane phase, including sideslip angle-sideslip angular velocity (Inagaki et al., 1994), yaw rate-sideslip angle (Ono et al., 1998), and front-rear tire sideslip angle (Bobier and Gerdes, 2013). Different torque control algorithms, such as fuzzy control (Boada et al., 2005), PID (Liu et al., 2019), LQR (Linear quadratic regulator) (Dai et al., 2019), MPC (Model predictive control) (Zhang and Wu, 2016), and sliding-mode control (Truong et al., 2013) are initiated to allocate the needed torque during the steering process. For the torque distribution process, even distribution, generalized inverse matrix, and least square are the commonly used algorithms (Xu et al., 2019).
Plenty of works have been done in this area, most of the current research focuses on vehicles running on the regular road with an adhesion coefficient of around 0.8. With a lower adhesion coefficient, lower friction force can be provided by the road surface, thus, the easier the vehicle runs out of control. To deal with the critical situation of the passenger car, an 8 DOFs vehicle and 2 DOFs reference model are established and validated by the result of Carsim. According to the stability phase portrait and LQR method, an integrated AFS and DYC controller is designed. The effectiveness of the controller is proved by the simulation of two critical maneuvers on low friction adhesion road. The results show the overall improvement of the vehicle’s lateral stability.
Vehicle dynamic model
To investigate the differential torque steering control algorithms, the vehicle dynamic model is established based on the vehicle dynamic theory. For an operating vehicle, lots of freedom exists in the whole system, the simplification must be done based on the researchers’ focus. Normally, a 2 DOF model is established as the reference model and the multiple DOF model such as the 8, 10, or 14 DOF model is established to verify the torque distribution algorithms (Jaafari and Shirazi, 2016); (Goodarzi et al., 2011). In this case, 2 and 8 DOF vehicle dynamic models are built. Since the 8 DOF model is much more complicated than the 2 DOF model, the 8 DOF model is introduced first. The 8 DOF model is combined with the vehicle body, wheel, motor, and tire model.
Vehicle body model
For the vehicle dynamic model, the 4 out of 8 DOFs are for the vehicle body and the remaining 4 DOFs are for the wheel rotations. The 4 DOFs for the vehicle body model are the motion of longitudinal, lateral, yaw, and roll (Figure 1). The four motions can be identified as Eqs 1–4, the symbol and vehicle parameters used in these equations are shown in Table 1.
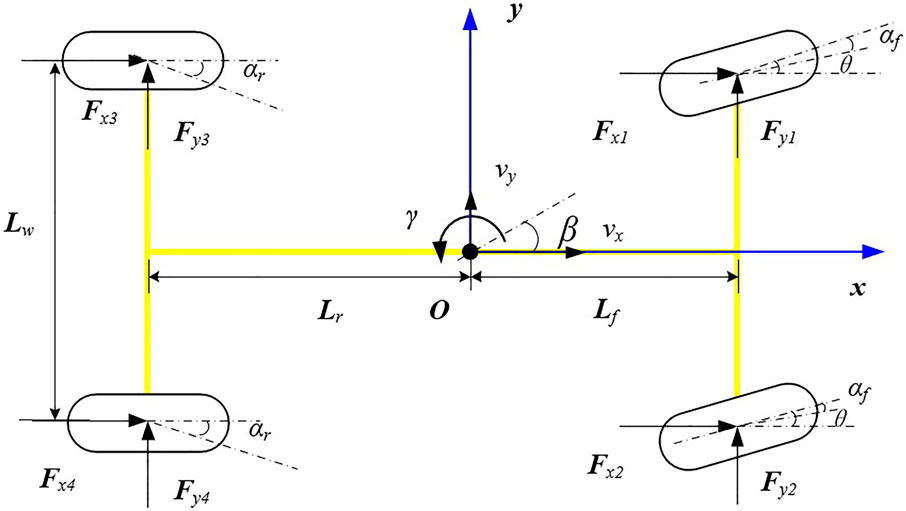
FIGURE 1. Diagram of the 8DOF model.
TABLE 1. Vehicle parameters.
Where,
In this case, only the front axle is the steering axle, therefore,
Wheel model
The rotation motion of the four wheels is taken into consideration in the wheel dynamic model. The dynamic of each wheel can be demonstrated as follows:
Where,
Where,
For the wheels on the rear, the speed of the left and right wheel,
Motor model
For the EV, as the driving unit, the motor is quite critical for the vehicle dynamic model. There are kinds of methods to establish the motor model (Adam, 2013). In this case, the torque distribution algorithm is the concern of our work. The mechanism inside the motor is not the priority. Thus, the model is built with a simple method that can represent the torque characteristic of the motor.
The motor model calculates the maximum torque in the current rotation speed, based on the dynamic response characteristic simulated by the first-order inertial response unit, the output torque of the motor,
Where,
Tire model
The tire system contacts the vehicle to the road surface, all of the vibration and forces are translated by it. To present the characteristic of the tire accurately, lots of work have been done to establish the tire model, the Fila tire model, UA tire model, Gim tire model, Dugoff tire model, HRSI tire model, Uni-Tire model, Magic Formula tire model (MF tire) are widely used in the vehicle dynamic model. In this case, two tire models are used, MF tire and brush tire.
For the MF tire model, its parameters are fit from the analysis of the test. It can be expressed as (Pacejka and Besselink, 1997):
When
In which, the longitudinal acceleration
For the later force of the tire,
2 DOF reference model
The 2DOF model (shown in Figure 2), also known as the single-track model or bicycle model, is a classic model to analyze the lateral stability of a vehicle. In this model, only the degree of lateral and yaw motion is taken into consideration, the tire sideslip angle of one axle is the same.
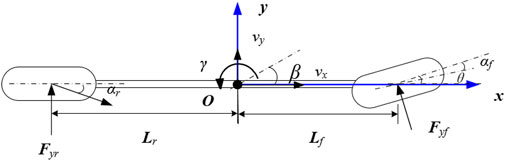
FIGURE 2. 2 DOF reference model.
The 2 DOF model can be built based on the simplification of Eqs 2, 4. The simplified equations to describe the lateral and yaw motion of the vehicle are Eqs 15, 16:
The relationship between the lateral force and tire sideslip angle is nonlinear. A nonlinear tire model is necessary to calculate the lateral force. A brush tire model variant of the Fiala nonlinear brush model, assuming one coefficient of friction and parabolic force distribution, as described by Pacejka (Pacejka, 2012). In the brush model, the lateral force,
The footnote,
Model validation
To investigate the vehicle dynamics control algorithm, the accuracy and efficiency of the model should be taken into consideration. The model should be able to reflect the vehicle dynamics but not too complicated. Normally, the vehicle field test result or results are simulated by commercial platforms, such as Adams/Car and Carsim. In this case, Carsim is chosen to validate the established model.
The severe double lane-change maneuver is one of the most common conditions to verify the accuracy of models. It is a dynamic process consisting of rapidly driving a car from its original lane to another parallel lane and returning to the initial lane. During the process, the vehicle should not exceed the lane boundaries. It is widely used in vehicle stability assessment because its result is repeatable and discriminatory. In this case, the double lane-change maneuver on the high adhesion road with the speed of 80 km/h is chosen to verify the established models.
The vehicle yaw rate, sideslip angle, and trajectory of the established models and Carsim model in the double-lane change condition on the road with the adhesion of 0.3 are compared in Figures 3–5.
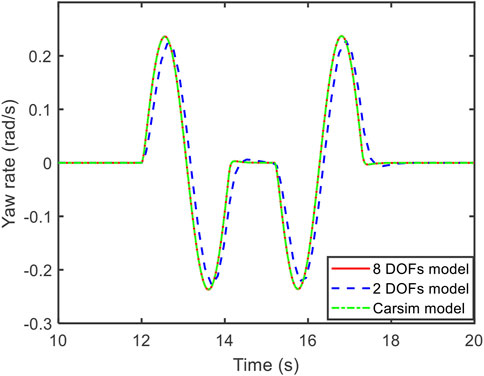
FIGURE 3. Comparison of yaw rate.
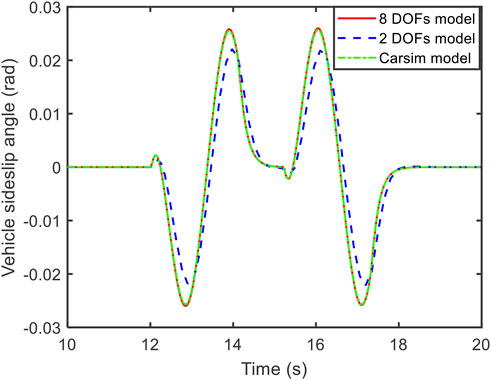
FIGURE 4. Comparison of vehicle sideslip angle.
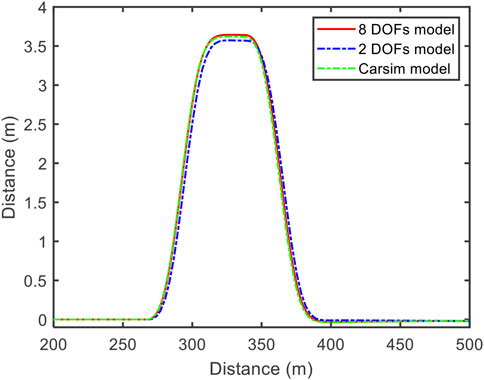
FIGURE 5. Comparison of vehicle trajectory.
According to the comparison in Figures 3–5, the output of the established 8 DOFs and 2 DOFs models is close to the Carsim. Taking the result of Carsim as the baseline, the MAPE (mean absolute percentage error) is listed in Table 2.
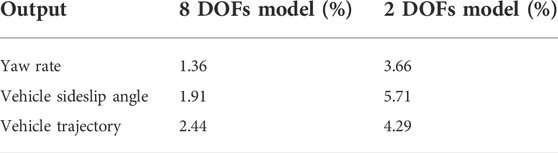
TABLE 2. MAPE of the established models.
The MAPE of the 8 DOFs model is lower than the 2DOFs model. The MAPE of the 2 DOFs model stays at a relatively low level, the maximum MAPE is lower than 6%. Therefore, these two models can be used in further analysis.
Design of control system
The structure of the proposed control strategy is shown in Figure 6. The reference model is a 2 DOF model with a nonlinear brush tire. The main goal of the control system is to make the actual yaw rate,
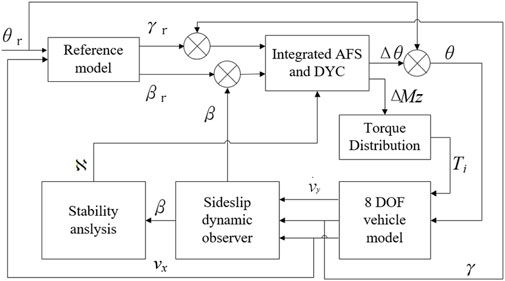
FIGURE 6. Structure of control strategy.
Integrated AFS and DYC controller
Based on Eqs 14–17, the state-space function of the 2 DOF model can be expressed as:
The lateral stiffness of the front tire can be gained based on Eqs 16, 22.
According to the 2 DOFs model, the ideal vehicle yaw rate and sideslip angle can be gained. The active steering angle and torque are acquired according to the optimal solution of equation (24). It can be expressed as:
Where, matrix
The matrix meets the Riccati equation.
Coordination of AFS and DYC
Once the steering angle and yaw moment are gained, the control task should be determined. According to Aouadj’s work, the steering angle will always be taken as the input, the yaw moment will be initiated only when the vehicle is in a dangerous condition (Aouadj et al., 2020). In this case, the
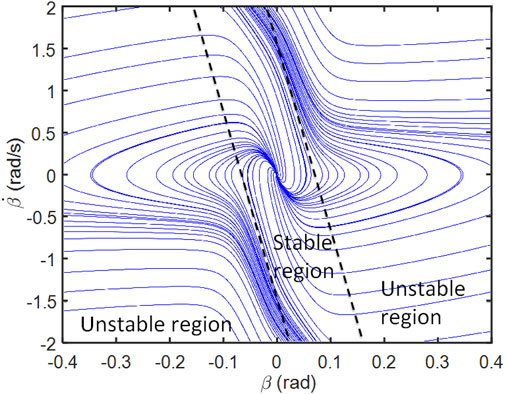
FIGURE 7. Stable region in the sideslip angle and angular velocity phase portrait.
As shown in Figure 7, the phase portrait is divided into three parts, one stable region, and two unstable regions. The boundary of the stable and stable region can be described by Eq. 35 (He et al., 2006):
The parameter
Simulation and discussion
There are some classical work conditions to access the vehicle’s lateral stability, such as steady steering, snake steering, fishhook, and double lane change. Among them, the double lane-change and fishhook are the most critical conditions. Therefore, they are chosen to compare the lateral stability performance with two different torque control algorithms. The double lane-change is initiated based on the regulation in ISO-3888-1–2018 (ANSI, 2018)(Passenger cars-Test track for a severe lane-change maneuver: Part 1 double-lane change), the fishhook test is based on Laboratory test procedure for dynamic rollover, the fishhook maneuver test procedure (New car assessment program, NCAP).
Double lane-change
Normally, the recommended speed on the snow or ice road is within 30 km/h. However, some drivers run the vehicle at a higher speed based on their experience. Therefore, the speed of 36 km/h is chosen to initiate the simulation.
The steering angle and torque of each wheel are shown in Figures 8–10, respectively.

FIGURE 8. Comparison of steering angle.
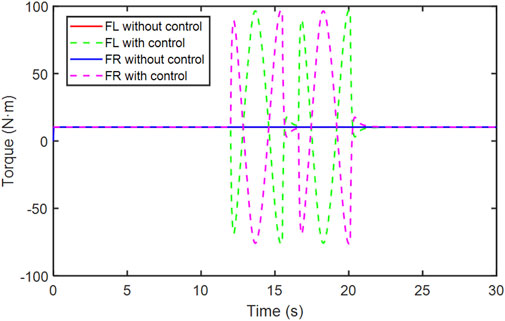
FIGURE 9. Comparison of front wheel torque.
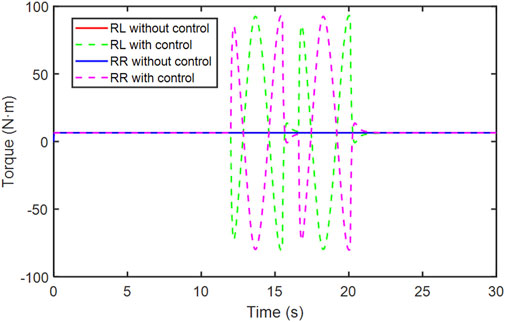
FIGURE 10. Comparison of rear wheel torque.
In Figure 8, the steering angle with and without control is compared. Without control, the steering angle is the same as the reference. With the controller, the steering angle is different from the reference, the maximum gap is 0.002 rad.
According to the comparison in Figures 9, 10, with the control algorithm, the torque varies to maintain the stability of the vehicle. The left and right wheel torque of the same axle have the opposite variation trend.
The vehicle routine, phase portrait, and yaw rate are calculated and compared in Figures 11–13.

FIGURE 11. Comparison of double lane-change routine.
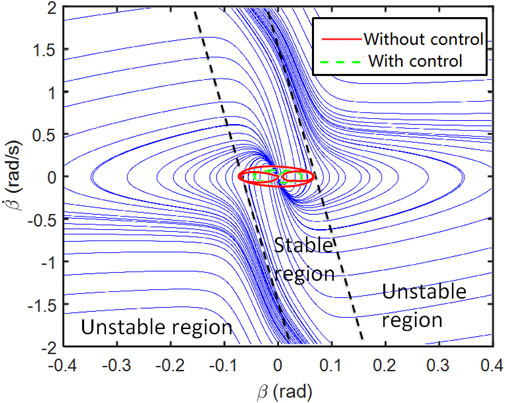
FIGURE 12. Comparison of the phase portrait.
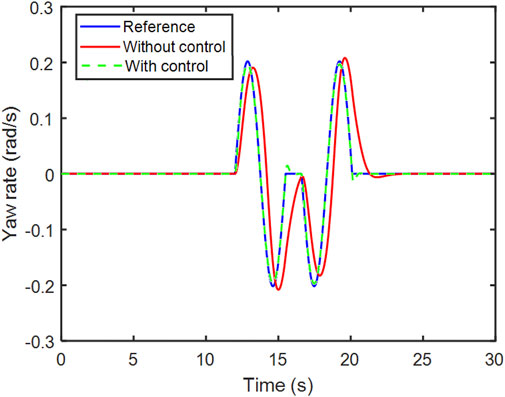
FIGURE 13. Comparison of yaw rate.
In Figure 11, the red line represents the lane boundary regulated in ISO 3888:2018. The box means the vehicle, the blue and green dash line is the vehicle routine without and with the control method. Without control, the vehicle fails to pass the double lane-change test. The maximum offset distance is 1.41 m. With the control algorithm, the vehicle can finish the test without exceeding the boundaries.
In Figure 12, it is clear that the envelope with control is smaller than the envelope without control. The envelope without exceeds the stable boundaries a bit, which means the vehicle is at the edge of stable and unstable. With the controller, both of the vehicle sideslip angle and angular velocity are maintained in a lower range.
Figure 13 shows the yaw rate variation of the reference model, without and with control. With control, the maximum error of the reference model is 0.01 rad/s. Without control, the actual vehicle yaw rate is lag behind the reference model with approximately 0.5 s, the maximum error is 0.1 rad/s if the effect of the time delay is eliminated.
Fishhook maneuver
Fishhook maneuver is the test procedure of the New Car Assessment Program (NCAP) used by the National Highway Traffic Safety Administration (NHSTA) to evaluate light vehicle dynamic rollover maneuver. This test procedure is also used by the researchers to evaluate the lateral stability (Jin et al., 2017). According to the test procedure, the steering angle variation during the process is shown in Figure 14 (without control).
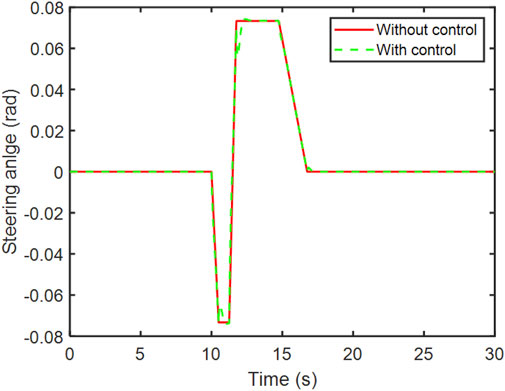
FIGURE 14. Steering angle variation during the fishhook maneuver.
With the controller, the AFS makes the steering angle varies from the reference angle. The gap occurs at the sudden change of the steering angle, the maximum gap is 0.016 rad.
During the fishhook maneuver, the toque of the wheels is shown in Figures 15, 16.
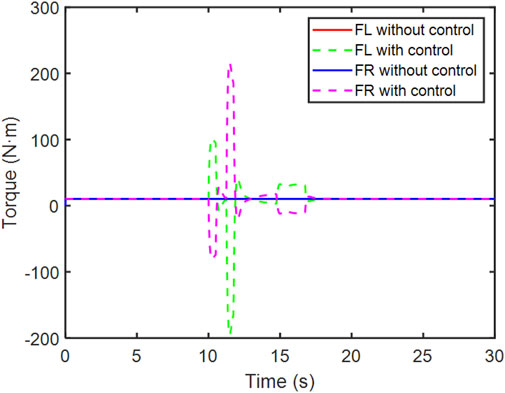
FIGURE 15. Comparison of front wheel torque.
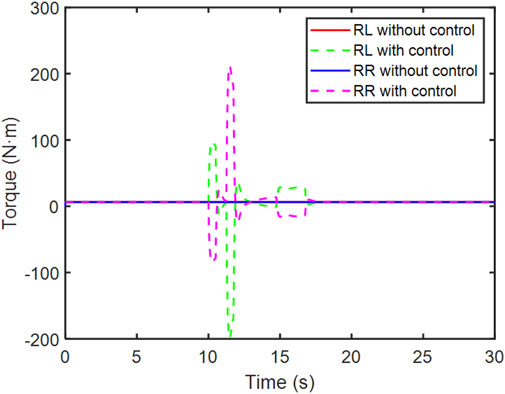
FIGURE 16. Comparison of rear wheel torque.
The vehicle routine, phase portrait, and yaw rate during the fishhook maneuver are calculated and compared in Figures 17–19.
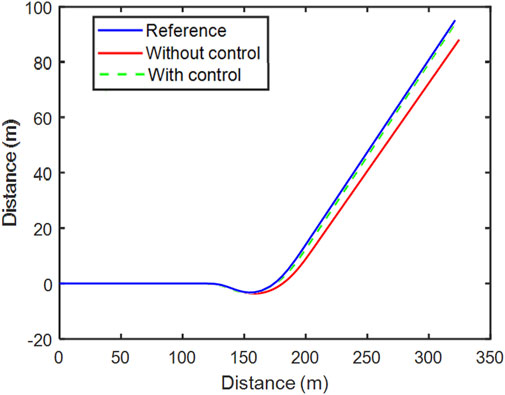
FIGURE 17. Comparison of double lane-change routine.
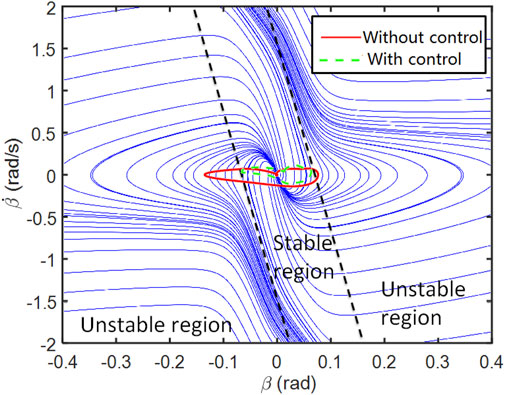
FIGURE 18. Comparison of the phase portrait.
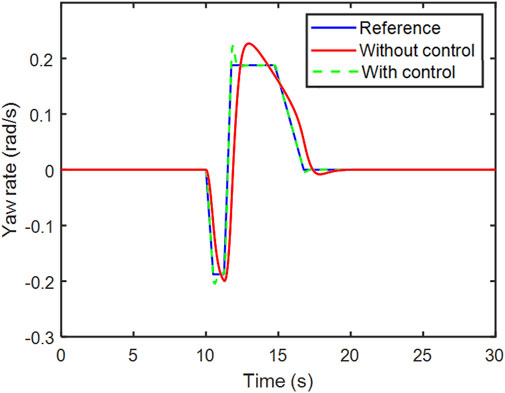
FIGURE 19. Comparison of yaw rate.
Figure 17 illustrates the vehicle track of the reference model, with and without the control algorithm. With the integrated control, the gap between the reference model and the 8 DOF model is relatively small. The difference between the track of the model without control and the reference model occurs at the beginning of the steering and gets bigger with time.
Figure 18 demonstrates the difference of the phase portrait track. The track of the model without control exceeds the boundary of stable boundaries. The variation range of the vehicle sideslip angle is much higher than the vehicle sideslip angular velocity. With the help of control method, the AFS and DYC are coordinated and the track stays in the stable region.
In Figure 19, the yaw rate of the three models is compared. The yaw rate of the reference model varies strictly with the steering input. The yaw rate of the model with control is close to the yaw rate of the reference model, except for the two inflection points 10.5 and 11.75 s, the error between the model with control and reference model gets bigger. The maximum error is 0.03 rad/s. For the yaw rate of the model without control, it takes more time to eliminate the gap to the reference model, the maximum error is 0.03 rad/s. However, the mean error is bigger than the model with control.
Conclusion
The goal of this study is to design an integrated vehicle dynamics controller to enhance the vehicle lateral stability. To deal with the critical condition on a low adhesion coefficient road, a 2 DOF nonlinear reference model and 8 DOFs model are built and validated by Carsim. The integrated AFS and DYC controller is designed. Based on the dynamic analysis, the effectiveness of the provided algorithm in two typical conditions is proved by the 8 DOFs model.
Without the control method, the vehicle fails to pass the double lane-change test at the speed of 36 km/h on the road with a low adhesion coefficient of 0.3. The track on the
According to the comparison of lateral stability indicators of double lane-change and fishhook maneuver, the goal is achieved, the lateral stability and path tracking ability of the vehicle on the low adhesion road is improved. The improvement of the vehicle safety and path tracking ability lays a good foundation for the whole vehicle-to-grid system.
Data availability statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author contributions
YW is responisble for the simulation and writting of this paper. YL provides the assistance of the simulation and vehicle parameters. PW provides the original idea and funding.
Funding
This study was funded by the Innovative Research Team Development Program of Ministry of Education of China (IRT_17R83), and the 111 Project (B17034) of China.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Adam, A. A. (2013). Accurate modeling of PMSM for differential mode current and differential torque calculation.” in International Conference on Computing, Khartoum, August 26, 2009. IEEE.
ANSI (2018). Passenger cars-test track for a severe lane-change maneuver: obstacle avoidance-Part 1: Double lane-change. ISO 3888-1:2018 (E).
Aouadj, N., Hartani, K., and Fatiha, M. (2020). New integrated vehicle dynamics control system based on the coordination of active front steering, direct yaw control, and electric differential for improvements in vehicle handling and stability. SAE Int. J. Veh. Dyn. Stab. NVH 4, 119–133. doi:10.4271/10-04-02-0009
Boada, B. L., Boada, M. J. L., and Díaz, V. (2005). Fuzzy-logic applied to yaw moment control for vehicle stability. Veh. Syst. Dyn. 43 (10), 753–770. doi:10.1080/00423110500128984
Bobier, C. G., and Gerdes, J. C. (2013). Staying within the nullcline boundary for vehicle envelope control using a sliding surface. Veh. Syst. Dyn. 51 (2), 199–217. doi:10.1080/00423114.2012.720377
Chen, T., Xu, X., Li, Y., Wang, W., and Chen, L. (2017). Speed-dependent coordinated control of differential and assisted steering for in-wheel motor driven electric vehicles. Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering.095440701772818
Dai, Y., Yu, L., Song, J., and Zhao, W. (2019). The differential braking steering control of special purpose flat-bed electric vehicle. Detroit: WCX SAE World Congress Experience.
Goodarzi, A., Soltani, A., and Esmailzadeh, E. (2011). Active variable wheelbase as an innovative approach in vehicle dynamic control.” in ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Khartoum, August 26, 2009.
He, J., Crolla, D. A., Levesley, M. C., and Manning, W. J. (2006). Coordination of active steering, driveline, and braking for integrated vehicle dynamics control. Proc. Institution Mech. Eng. Part D J. Automob. Eng. 220 (D10), 1401–1420. doi:10.1243/09544070jauto265
Inagaki, S., Kushiro, I., and Yamamoto, M. (1994). Analysis on vehicle stability in critical cornering using phase-plane method. JSAE Rev. 16 (21), 216.
Jaafari, S., and Shirazi, K. H. (2016). A comparison on optimal torque vectoring strategies in overall performance enhancement of a passenger car. Proc. Institution Mech. Eng. Part K J. Multi-body Dyn. 1464419315627113, 469–488. doi:10.1177/1464419315627113
Jin, X., Yu, Z., Yin, G., and Wang, J. (2017). Improving vehicle handling stability based on combined afs and dyc system via robust takagi-sugeno fuzzy control. IEEE Trans. Intell. Transp. Syst. 19, 2696–2707. doi:10.1109/tits.2017.2754140
Khalfaoui, M., Hartani, K., Merah, A., and Aouadj, N. (2018). Development of shared steering torque system of electric vehicles in presence of driver behaviour estimation. Int. J. Veh. Aut. Syst. 14 (1), 18. doi:10.1504/ijvas.2018.093100
Li, S., Zhao, J., Yang, S., and Fan, H. (2019). Research on a coordinated cornering brake control of three-axle heavy vehicles based on hardware-in-loop test. IET Intell. Transp. Syst. 13 (5), 905–914. doi:10.1049/iet-its.2018.5406
Liu, Z., Pei, X., Chen, Z., Yang, B., and Guo, X. (2019). Differential speed steering control for four-wheel distributed electric vehicle. Detroit: WCX SAE World Congress Experience.
Ono, E., Hosoe, S., Tuan, H. D., and Doi, S. (1998). Bifurcation in vehicle dynamics and robust front wheel steering control. IEEE Trans. Control Syst. Technol. 6 (3), 412–420. doi:10.1109/87.668041
Pacejka, H. B., and Besselink, I. J. M. (1997). Magic Formula tyre model with transient properties. Veh. Syst. Dyn. 27 (S1), 234–249. doi:10.1080/00423119708969658
Soares, N., Martins, A. G., Carvalho, A. L., Caldeira, C., Du, C., Castanheira, E., et al. (2018). The challenging paradigm of interrelated energy systems towards a more sustainable future. Renew. Sustain. Energy Rev. 95 (NOV), 171–193. doi:10.1016/j.rser.2018.07.023
Truong, T., Tomaske, V., and Winfried, D. (2013). Active front steering system using adaptive sliding mode control.” in Chinese control and decision conference, Khartoum, August 26, 2009.
Xu, K., Luo, Y., Yang, Y., and Xu, G. (2019). Review on state perception and control for distributed drive electric vehicles. J. Mech. Eng. 55 (22), 60. doi:10.3901/JME.2019.22.060
Zhang, L., and Wu, G. (2016). Combination of front steering and differential braking control for the path tracking of autonomous vehicle. WCX SAE World Congress Experience.
Keywords: vehicle-to-grid, integrated stability control, low adhesion coefficient road, linear quadratic regulator, vehicle dynamic
Citation: Wang Y, Lei Y and Wang P (2022) Integrated stability control for a vehicle in the vehicle-to-grid system on low adhesion coefficient road. Front. Energy Res. 10:969676. doi: 10.3389/fenrg.2022.969676
Received: 15 June 2022; Accepted: 05 July 2022;
Published: 04 August 2022.
Edited by:
Jiajia Yang, University of New South Wales, AustraliaReviewed by:
Jin Zhu, Chinese Academy of Sciences (CAS), ChinaLiye Zhang, Shandong University of Science and Technology, China
Sen Zhan, Chongqing Jiaotong University, China
Copyright © 2022 Wang, Lei and Wang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Peipei Wang, d3BwMjAwM0B3aHV0LmVkdS5jbg==