
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
BRIEF RESEARCH REPORT article
Front. Energy Res. , 15 March 2022
Sec. Smart Grids
Volume 10 - 2022 | https://doi.org/10.3389/fenrg.2022.865069
This article is part of the Research Topic Advanced Anomaly Detection Technologies and Applications in Energy Systems View all 64 articles
 Shengming Li1,2
Shengming Li1,2 Lin Feng1,2*
Lin Feng1,2*How to save the energy of unmanned aerial vehicles (UAVs) and then enable long-distance transport is a very real and difficult task. However, for UAVs, the classic object detection algorithm, such as the deep convolutional neural network–based object detection algorithm and the classic flight control algorithm, such as the PID-based position control algorithm, require significant energy, which limits the application scenarios of the UAV system. In view of this problem, this paper proposes a lightweight object detection network and a linear active disturbance rejection controller (LADRC) for the quadrotor with the cable-suspended payload (QCSP) system to improve energy efficiency. The system uses a YOLOV3 network and embeds it into the Jesson NX mobile platform to accurately detect the target position. Furthermore, a nonlinear velocity controller with a cable-suspended structure to control the velocity of the payload, a LADRC algorithm is adopted to achieve fast and accurate control of the payload position. Simulations and real flight experiments show that the proposed object detection algorithm and the LADRC control strategy can save the energy of drone effectively.
With the development of unmanned aerial vehicle (UAV) technology (Wu et al., 2018), drone transport has become an important branch of UAV applications. The quadrotor with the cable-suspended payload (QCSP) (Lv et al., 2020; Lv et al., 2021) equipped with a camera and an embedded platform, is of great relevance to the realization of rescue and transport tasks. The QCSP actively adjusts the UAV’s own attitude to quickly reduce the oscillation of the suspended load and then runs the vision algorithm through the embedded platform to process the images from the camera to obtain an accurate target position for the drone. Based on the target position information, the QCSP needs to reach the target position quickly and stably. However, in the transportation process, in addition to the energy required for drone flight, the object detection algorithm and the QCSP flight control strategy also consume great energy. Therefore, by considering the limited battery capacity of the drone, it is important to improve the energy efficiency of the QCSP systems.
Recent decades witness great progress in object detection with the development of convolutional neural networks (CNNs). To obtain a powerful network, numerous efforts are made to build large and complex architecture with high computation and energy consumption, which restricts its application on embedding devices such as a drone. To get the light network, Z. Liu et al. (Liu et al., 2017) utilize scaling factors to value the significance of connections and remove these under a threshold. This efficient method works well for classification networks. However, it lacks effectiveness for detection networks. To make the network compression method suitable to detection network, Z. Xie et al. (Xie et al., 2020) introduce location-aware loss for network compression, which helps in preserving the comprehensive ability of the detection network. These methods are not optimal for saving energy because they do not adopt an energy-aware function during compressing.
To realize the path following for the QCSP, Qian, et al. (Qian and Liu, 2019) propose a controller based on uncertainty and an interference estimator. Hao, et al. (Hao et al., 2021) propose a nonlinear, robust, fault-tolerant, position-tracking, control law for a tilt tri-rotor UAV, thus avoiding rear servo’s stuck fault together with parametric uncertainties and unknown external disturbances. To enable a multirotor UAV to achieve static hovering, Mochida, et al. (Mochida et al., 2021) propose a geometric method that reveals the relationship between the position of the center of mass (CoM) and the rotor placement of a multirotor UAV with upward-oriented rotors. These methods can effectively help UAVs accomplish their tasks, but they do not take into account the energy limitation of UAVs; the algorithm is complex and not applicable to the QCSP.
Although many researchers have done meaningful work and achieved results, there are still some challenges in vision processing and position control in the energy-efficiency-oriented QCSP, mainly as follows: 1) Object detection technique–based CNNs can obtain accurate target information for a UAV, but the improved detection performance of deep neural networks also brings huge energy consumption, which is not friendly to the QCSP. 2) The QCSP needs to control the load stably and reach the target position quickly, whereas the traditional PID controller usually needs a long adjustment time for the UAV to reach the target position, which is also not conducive to the QCSP system to save energy for long-distance transportation.
To improve the energy efficiency of the QCSP systems, we propose a lightweight object detection algorithm and an LADRC payload position control strategy for the QCSP. Specifically, the object detection model is compressed by network scaling factors and an energy-aware penalty, which enables the YOLOV3 network to run on the Jetson NX embedded platform of the QCSP with low energy consumption. In addition, an efficient control strategy in the form of a string stage is used to overcome the under-actuated characteristics of the QCSP, which includes attitude, swing angle, load velocity, and load position subcontrollers. The contributions of this paper to the energy saving of QCSP mainly include 1) a new QCSP experimental platform with embedded vision detection is constructed, and a lightweight object detection network is used to obtain position information; 2) an LADRC algorithm is used to control the payload position quickly and efficiently.
The remainder of this paper is structured as follows: Section 2 introduces the dynamic model and object detection algorithm of the QCSP in detail; controller design, including the LADRC position control algorithm for the QCSP is introduced in Section 3; in Section 4, the effectiveness of the proposed QCSP system is verified through experiments. Conclusions are drawn in Section 5.
There are three reference frames to describe the QCSP (Lv et al., 2020) system (see left of Figure 1): the inertial frame
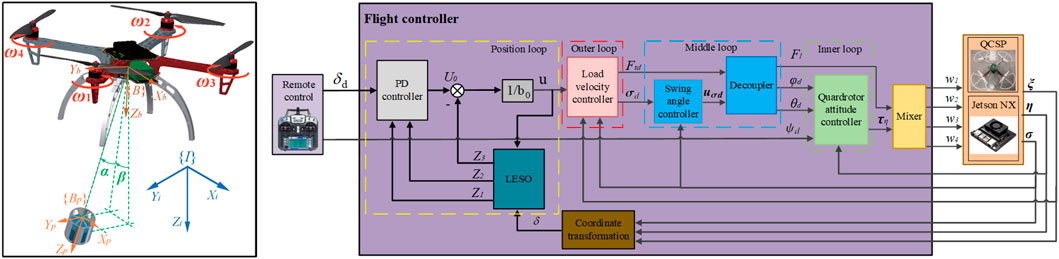
FIGURE 1. The schematic diagram and the control block diagram of the QCSP.
The coordinate
and the velocity of the payload is expressed by
Following previous work (Lv et al., 2020), the dynamic model of the QCSP system is described by the following equations:
where
For dynamic model described by Eq. 3a, mq is the mass of the quadrotor, mp is the mass of the payload, g is the gravity acceleration, Dξ and Dδ are the air drag forces that act on the quadrotor and the payload, respectively. RG is the projection vector in the inertial frame
For the dynamic submodel described by Eq. (3b), Dη denotes the aerodynamic drag torque on the quadrotor. What needs to be mentioned is that
For the dynamic model described by Eq. 3c, the drag torque Dσ on the payload is given by
where
where a = 1/mp,
It can be found that Mσ, Fδe, and Fσe do not contain a.
Apart from dynamic model controlling the basic attitude of the quadrotor, the motion of the quadrotor depends on the guide of the object detection network (ODN). Currently, because of accuracy and effectiveness, YOLOV3 (Redmon and Farhadi, 2018) is adopted in a growing number of real-world situations. However, this ODN method is computationally expensive; hence, it creates huge energy consumption, which is not friendly to the QCSP system. Therefore, compressing the ODN to obtain a lightweight ODN is essential for deploying YOLOV3 on the quadrotor. As mentioned, preserving computational performance and saving energy cost simultaneously are challenging issues. For preserving performance of the network, we utilize the sparsity-induced penalty to retrain a sparsity network indicated by scaling factors. Then, these low-significance connections distinguished by scaling factors are removed to achieve network compression. Considering the energy consumption, we add an energy-aware penalty to supervise the compression process. Specifically, the retrain objective is given by
where l (⋅) denotes the supervised training loss; for YOLOV3, l (⋅) is the detection loss proposed in (Redmon and Farhadi, 2018). (X, Y) denote the retrain input and label, W denotes the learnable weights, ‖ ⋅‖1 denotes the L1-norm function, γ is a scaling factor and Γ is the scaling factors set, ‖γ‖1 is used as a sparsity-induced penalty. In practice, the learnable γ in batch normalization (Ioffe and Szegedy, 2015) is widely adopted as a scaling factor.
where eMAC denotes the energy consumption of one systolic array MAC (Kung, 1982) (a kind of hardware widely used in GPU or TPU) operation, whereas h and w denote the height and weight of the convolutional layer input, ‖ ⋅‖0 denotes the L0-norm function, p, r, s denote the convolutional arguments, i.e., padding, kernel size, and stride. Data access energy
Obviously, Eq. 6 gives a meaningful objective. However, it is hard to optimize because of
where γ(i) is a scaling factor vector of the ith layer. Then, we optimize the above equation to obtain a sparsity distribution of scaling factors and remove these low-significance connections. After that, the compact network is fine-tuned for several iterations to resume.
Finally, a network deployed on a computation and energy-limited platform could be accessed. We utilize this compact network to provide location and category information of the target object to the quadrotor as a basis for flight adjustment.
Because of the underactuated character of the QCSP, the proposed controller mainly consists of two parts: the cascade controller for attitude self-stabilization and the active disturbance rejection controller for position control (see the right subfigure of Figure 1). Referring to (Lv et al., 2020), the design process of the cascade controller mainly consists of three parts: inner-loop attitude, middle-loop swing angle, and outer-loop velocity subcontrollers.
Errors associated with the dynamics of the QCSP are given as follows:
where
The swing angle error dynamics of the payload are deduced from Eq. 11:
Considering the subsystem (see Eq. 5b), the inner-loop subcontroller (see the right of Figure 1) is used to control the attitude η of the quadrotor, which is measured by the inertial measurement unit (IMU) integrated in the flight control system of the quadrotor. The control torque
where
Referring to Eq. 16 in (Lv et al., 2020), the adaptive swing angle controller is applied to make σ follow the desired σd. Noting Eq. 5c,
where Kpσ = diag (kpα, kpβ) is constant positive definite.
For the desired acceleration
As illustrated in the outer-loop part of the right subfigure in Figure 1, the outer-loop velocity controller is utilized to track the desired velocity
with a constant positive definite diagonal matrix
LADRC is utilized for the position control of quadrotors. There are two parts in the LADRC, including the linear extended state observer (LESO) and PD controller. The LESO estimates the internal and external disturbances of the system through an extended state, which is called total disturbance, and compensates the control variables. Therefore, the integrator used in traditional PID to eliminate static error under constant disturbance is no longer necessary. The system can be stabilized by PD controller.
Referring to the controller built by Gao in (Han, 2009) and taking δd as the expected input of the controller and δ as feedback, the designed LADRC block diagram is as follows:
Compared with ESO (Han, 2009), LESO introduces the frequency domain method. It connects the parameters with the observer bandwidth, making the parameter tuning more convenient.
The LESO for the position control of the QSCP is designed as
where uc = [u δ]⊤ is the input of LESO, and yc is the output. Besides this,
Under the action of LESO, the linear PD controller can stabilize the system. Besides this, the proportional coefficient and differential time constant are related to the controller bandwidth, which simplifies the tuning of the controller.
The PD controller is designed as
where δd is the expected input of the controller. z1 and z2 are observer states from LESO. kp and kd are the parameters of the controller gain matrix
Finally, the control quantity u0 with the total disturbance z3 has to be compensated, and the control quantity u is
For the position control, it is necessary to obtain the position coordinates of the target point, but the camera feeds back the pixel coordinates, which should be compensated by attitude angle and height information. Besides this, due to the relative displacement between the quadcopter and the load, the coordinates of the target point collected by the camera relative to the quadcopter should be transformed into the coordinates relative to the load.
To verify the effectiveness of the proposed algorithm, a QCSP experimental platform was created. The payload is connected to the bottom of the F450 quadcopter by a Cadan joint, and the Jetson NX board is fixed to the bottom plate with the camera as shown in Figure 3A.
Before the flight test, we simulated the designed LADRC control strategy and compared it with the conventional PID algorithm as shown in Figure 2. The parameters of LADRC and PID are obtained by many experiments according to overshoot and response time. Among them, “desired” is the target position curve after transformation, “fpid” is the position curve of the payload under PID control. “fladrc” is the position curve of the payload under LADRC control. It can be seen that, at 20 s, given a target position of 80 cm, the payload achieved steady state in 7 s without overshoot under the LADRC control, while the state of the system oscillated and took more than three times as long to stabilize under the PID controller. When a sin disturbance signal is added in 80 s, the LADRC can obviously suppress the disturbance. As a result, it can be deduced that the LADRC controller is effective in saving QCSP energy.
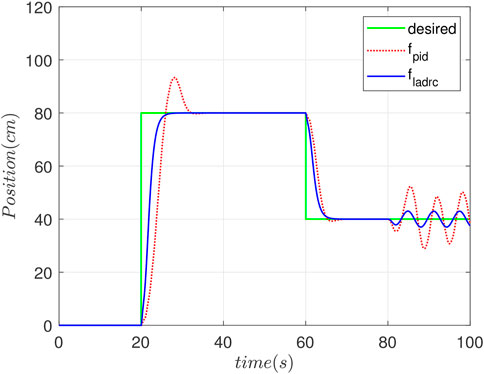
FIGURE 2. The comparison results of PID and the LADRC position controller.
The QCSP vision deployment hardware is Jetson NX, which runs aarch64 Ubuntu 18.04 as the operating system. PyTorch (Paszke et al., 2019) is used as the retraining, fine-tuning, and inference deep learning software. For efficient inference, popular object detection model YOLOV3(Redmon and Farhadi, 2018) is adopted, whose backbone is replaced by MobileNet (Howard et al., 2017) from DarkNet. The image size requires 416 × 416. The original network is retrained on a PASCAL VOC data set (Everingham et al., 2010) for 50,000 iterations and removes the connections whose scaling factors are lower than the threshold 0.01. Then, the compact network is fine-tuned for 12,000 iterations. The retraining and fine-tuning, which cost a large amount of computing power, are carried out on NVIDIA RTX 2080Ti, and only inference is done on the embedding Jetson NX platform. The target pattern is the helicopter landing area-“H”, and the recognition effect is shown in part (b) of Figure 3, where four objects are detected with confidence 0.89, 0.95, 0.98, and 0.97.
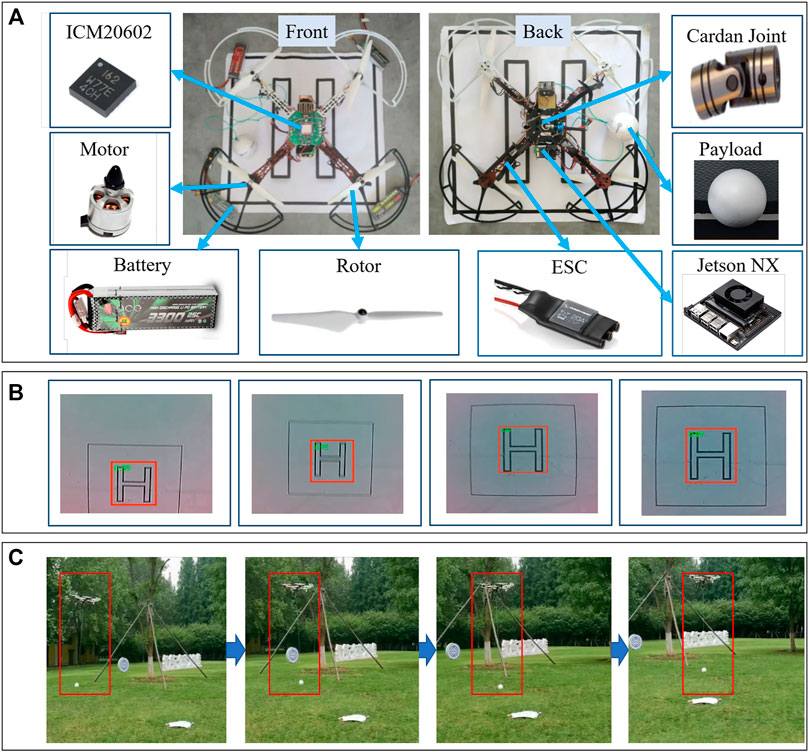
FIGURE 3. Experimental platform of QCSP object detection and position control flight test.
Compression results are reported in Table 1. Through our method, we saved about 52% energy of the whole network with only 0.7 mean average precision (mAP) dropping. In addition, we also demonstrate the necessary of using sparsity-induced and energy-aware penalties simultaneously. In the case of only the sparsity-induced penalty used, the energy saved is not satisfactory (43% saved), but performance drops a lot (1.4) when only the energy-aware penalty is used.

TABLE 1. Object detection performance on PASCAL VOC. “Penalty” denotes the penalty item that we added for training loss. “Energy” denotes the energy cost for detecting one image. “Energy ↓” denotes the energy saved comparing to original network whose backbone is MobileNet; “mAP” is a common indicator evaluating the performance of detection network.
During the actual flight experiment, the quadcopter flew along the positive direction of the X axis at the speed of 20 cm/s. When the target point is identified by Jetson NX, it turn into position control mode as shown in Figure 3C. From the experiment, it can be seen that the QCSP system can control the payload stably, and when the target position is detected, it can reach the destination quickly and remain stable.
Energy-efficiency plays a crucial role in the development of UAVs. In this paper, a lightweight YOLOV3 object detection network with a LADRC-based position controller is proposed to reduce the energy consumption of the QCSP system. The experimental results show that the compressed network can save more than 50% of energy compared with the original network with little accuracy loss, and the LADRC controller has three times faster stabilization time and no overshoot compared with the classic PID controller and has a suppression effect on disturbing signals. Therefore, the work done in this paper can effectively save the energy of the QCSP and improve its range, anti-interference performance, and robustness.
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author.
SL contributed to the architecture, property, and training algorithm, and design of feedback controller of the QCSP systems. SL, and LF drafted the work and contributed to the experiments and conclusions. All authors agree to be accountable for the content of the work.
National Natural Science Foundation of China No. 61972064; LiaoNingRevitalizationTalentsProgram No. XLYC1806006.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn, J., and Zisserman, A. (2010). The Pascal Visual Object Classes (Voc) challenge. Int. J. Comput. Vis. 88 (2), 303–338. doi:10.1007/s11263-009-0275-4
Han, J. (2009). From Pid to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 56 (3), 900–906. doi:10.1109/tie.2008.2011621
Hao, W., Xian, B., and Xie, T. (2021). Fault Tolerant Position Tracking Control Design for an Tilt Tri-rotor Unmanned Aerial Vehicle. IEEE Trans. Ind. Electron. 99, 1. doi:10.1109/TIE.2021.3050384
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D., Wang, W., Weyand, T., et al. (2017). Mobilenets: Efficient Convolutional Neural Networks for mobile Vision Applications. California: Google Inc. arXiv preprint arXiv:1704.04861. Available at: https://arxiv.53yu.com/pdf/1704.04861.pdf%EF%BC%89.
Ioffe, S., and Szegedy, C. (2015). “Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift,” in International conference on machine learning (PMLR), Lille, France, July 7–9, 2015, 448–456.
Kung, H.-T. (1982). Why Systolic Architectures? Computer 15 (01), 37–46. doi:10.1109/mc.1982.1653825
Liu, Z., Li, J., Shen, Z., Huang, G., Yan, S., and Zhang, C. (2017). “Learning Efficient Convolutional Networks through Network Slimming,” in Proceedings of the IEEE international conference on computer vision, Venice, Italy, October 22–29, 2017, 2736–2744. doi:10.1109/iccv.2017.298
Lv, Z.-Y., Li, S., Wu, Y., and Wang, Q.-G. (2021). Adaptive Control for a Quadrotor Transporting a cable-suspended Payload with Unknown Mass in the Presence of Rotor Downwash. IEEE Trans. Veh. Technol. 70 (9), 8505–8518. doi:10.1109/tvt.2021.3096234
Lv, Z.-Y., Wu, Y., and Rui, W. (2020). Nonlinear Motion Control for a Quadrotor Transporting a cable-suspended Payload. IEEE Trans. Veh. Technol. 69 (8), 8192–8206. doi:10.1109/tvt.2020.2997733
Mochida, S., Matsuda, R., Ibuki, T., and Sampei, M. (2021). A Geometric Method of Hoverability Analysis for Multirotor Uavs with Upward-Oriented Rotors. IEEE Trans. Robotics 99, 1–15. doi:10.1109/tro.2021.3064101
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J., Chanan, G., et al. (2019). “PyTorch: An Imperative Style, High-Performance Deep Learning Library,” in Advances in Neural Information Processing Systems. Editors Wallach, H., Larochelle, H., Beygelzimer, A., d\textquotesingle Alch\’{e}-Buc, F., Fox, E., and Garnett, R. (Curran Associates, Inc.) 32. Available at: https://proceedings.neurips.cc/paper/2019/file/bdbca288fee7f92f2bfa9f7012727740-Paper.pdf.
Qian, L., and Liu, H. (2019). Path Following Control of a Quadrotor Uav with a cable Suspended Payload under Wind Disturbances. IEEE Trans. Ind. Electron. 67, 1. doi:10.1109/TIE.2019.2905811
Redmon, J., and Farhadi, A. (2018). Yolov3: An Incremental Improvement. Washington D.C: University of Washington. Available at: https://arxiv.53yu.com/pdf/1804.02767.pdf.
Wu, Y., Hu, K., and Sun, X.-M. (2018). Modeling and Control Design for Quadrotors: A Controlled Hamiltonian Systems Approach. IEEE Trans. Vehicular Tech. 67 (12), 11 365. doi:10.1109/tvt.2018.2877440
Xie, Z., Zhu, L., Zhao, L., Tao, B., Liu, L., and Tao, W. (2020). Localization-aware Channel Pruning for Object Detection. Neurocomputing 403, 400–408. doi:10.1016/j.neucom.2020.03.056
Keywords: cable-suspended payload, quadrotor UAV, energy efficiency, object detection, linear active disturbance rejection controller, model compression
Citation: Li S and Feng L (2022) Energy-Efficiency-Oriented Vision Feedback Control of QCSP Systems: Linear ADRC Approach. Front. Energy Res. 10:865069. doi: 10.3389/fenrg.2022.865069
Received: 29 January 2022; Accepted: 08 February 2022;
Published: 15 March 2022.
Edited by:
Xun Shen, Tokyo Institute of Technology, JapanReviewed by:
Hongxu Zhang, Harbin University of Science and Technology, ChinaCopyright © 2022 Li and Feng. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Lin Feng, ZmVuZ2xpbkBkbHV0LmVkdS5jbg==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.