 Zhe-Li Yuan
Zhe-Li Yuan Da Xu
Da Xu Li Jin1,2,3
Li Jin1,2,3
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Energy Res. , 26 October 2021
Sec. Smart Grids
Volume 9 - 2021 | https://doi.org/10.3389/fenrg.2021.771465
This article is part of the Research Topic Advanced Optimization and Control for Smart Grids with High Penetration of Renewable Energy Systems View all 49 articles
In this paper, the stability of load frequency control (LFC) for delayed power systems with an electric vehicle (EV) aggregator is studied based on Lyapunov theory and linear matrix inequalities (LMIs). Through mechanism analysis, the LFC of power systems with an EV aggregator based on a proportional–integral–differential (PID) controller is modeled. By constructing a delay interval information correlation functional and estimating its derivative using Wirtinger inequality and extended reciprocally convex matrix inequality, a new stability analysis criterion is proposed. Finally, in order to verify its advantage, the proposed method is used to discuss the influence of EV aggregator gains and PID controller gains on the delay margins for LFC of power systems with EV aggregator participation in frequency regulation.
Under the guidance of sustainable development concept, the generation of renewable energy sources (RESs) such as wind power, hydropower, and photovoltaic power has developed rapidly in recent years, and part of traditional thermal power generation will be gradually replaced (Zhou et al., 2018). However, the grid connection of these RESs also brings some problems, especially the wind power generation with great intermittency and volatility (Jin et al., 2021b; Shi et al., 2021). These problems aggravate the imbalance between generation and load consumption in the power systems, resulting in obvious frequency fluctuation. Therefore, load frequency control (LFC) is widely used in power systems (Jin et al., 2019; Shangguan et al., 2021b). The frequency deviation caused by an intermittent energy grid connection is difficult to be eliminated by traditional generator sets. With the grid connection of controllable loads such as electric vehicles (EVs) and the rapid response characteristics of batteries, some studies paid attention to vehicle-to-grid technology, which provides frequency regulation services with a large number of converging EVs (Peng et al., 2017; Jia et al., 2018; Pinto et al., 2021; Teng et al., 2021).
In traditional power systems, the time delay phenomenon of the LFC system is not obvious. However, modern power systems tend to use flexible and open communication networks for information exchange (ShangGuan et al., 2021). For power systems with EVs and intermittent wind power connected, the EV aggregator needs to transmit the control command to the EVs through open communication networks (Ko and Sung, 2019; Li et al., 2019). The use of such networks will inevitably bring unreliable factors, such as time delay, packet loss, and potential failure, which may lead to instability of LFC for power systems (Jin et al., 2021a; Shangguan et al., 2021a). Therefore, it is very important to analyze the influence of time delays on the LFC of power systems with an EV aggregator. In addition, in order to ensure the stability of power system LFC, it is necessary to calculate the delay margins and determine all parameters of the proportional–integral–differential (PID) controller (Naveed et al., 2019b; Tek et al., 2020).
In recent years, EVs have been widely used in power systems, and there are also some studies on the influence of time delays and EV aggregator on LFC stability. The Rekasius substitution method is used to determine the stability delay margins of LFC with constant communication delays for an EV aggregator (Naveed et al., 2019a). Then, Naveed et al. presented a graphical method to describe the trajectory of the stable boundary and studied the influence of EV aggregators with communication delays on the stability regions and stability delay margins of the LFC system (Naveed et al., 2021). Based on Lyapunov theory and linear matrix inequalities (LMIs), stability criteria for time-varying delays using the Wirtinger-based improved integral inequality are proposed to calculate the delay margins for LFC with EVs, and the relationship between the gains and the delay margins of the PI controller is given in detail (Ko and Sung, 2018). Two stability criteria are derived, respectively, using Bessel–Legendre inequality and model reconstruction technique, and the interregional delay interaction and the effect of EV gain on the delay margins are discussed (Zhou et al., 2020). Khalil et al. proposed a microgrid model of photovoltaic power generation and EVs considering communication delay, and the maximum allowable delay bound for the stable operation of microgrids is calculated by solving the LMIs (Khalil et al., 2017). Dong et al. characterized the asymptotic stability of EV aggregation delays by using the delay distortion matrix structure of infinite operator dimension reduction and proved that convergence delay affects frequency stability in the form of low-frequency oscillation through three unstable modes (Dong et al., 2020). Although there have been some studies on the stability of delayed LFC systems with an EV aggregator, there are few studies on LFC of renewable energy power systems with an EV aggregator. Also, how to obtain more accurate delay margins remains a challenge.
In this paper, the stability of LFC for power systems with EV aggregator participation in frequency regulation is considered, and the influence of EV aggregator and controller gains on the delay margins is studied. Firstly, based on the PID controller, the LFC of power systems with an EV aggregator is modeled. Then, a new delay stability criterion using Wirtinger inequality and extended reciprocally convex matrix inequalities is proposed. Finally, according to the proposed stability criterion, the delay margins of LFC for power systems with an EV aggregator are obtained, and case studies are performed to show the advantage of the proposed method.
The block diagram of the LFC for power systems with an EV aggregator is given in Figure 1, and the controller is the PID controller. e−sτ and e−sd denote the time delay of the frequency regulation circuit involved in the EV aggregator and the secondary frequency regulation circuit, respectively; KEV is the gain of the EV aggregator; Δf, ΔPEV, ΔPWTG, ΔPm, ΔPv, and ΔPd are the deviation of frequency, EV aggregator power output, wind turbine generator (WTG) power output, mechanical output of the generator, valve position, and load disturbance, respectively. Definitions of other related symbols in the figure are shown in Table 1.
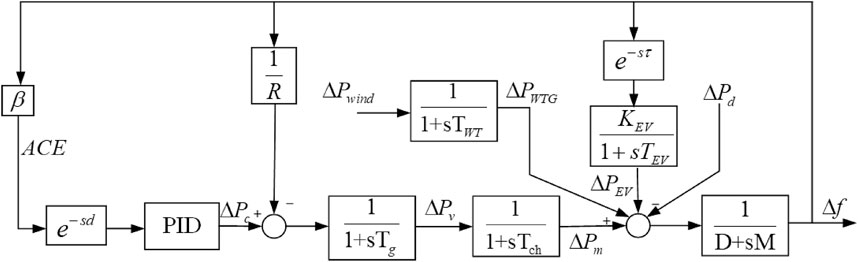
FIGURE 1. Frequency regulation scheme of the power system with an EV aggregator.
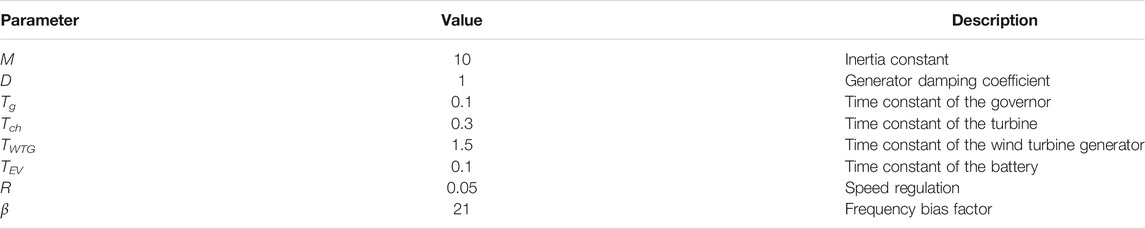
TABLE 1. Parameter of the LFC model.
Select the following state variables, output variables, disturbance, and control input:
Then, the following system state space model can be obtained:
where
The controller is designed as
Define the new vectors
where
In order to simplify the analysis, it is assumed that the delay τ(t) of the frequency regulation circuit involved in the EV aggregator is consistent with the delay d(t) of the secondary frequency regulation circuit. Then, the closed-loop state space equation of LFC for the delayed power system with an EV aggregator can be obtained as follows:
where A = A1, Ad = A2 – BKC, and Fw = F − BKD.
When discussing the internal stability of the power system, the influence of external disturbance can be ignored. The model of LFC for the delayed power system with an EV aggregator is obtained as follows:
where h1 ≤ d(t) ≤ h2 and ∀t > t0.
The following stability criterion for system (Eq. 9) is derived by using Wirtinger inequality (Seuret and Gouaisbaut, 2013) and extended reciprocally convex matrix inequality (Zhang et al., 2017).
Theorem 1. For given scalars α > 0, h2 > h1 > 0, the LFC of the closed-loop power system with an EV aggregator (Eq. 9) is exponentially stable, if there exist matrices P > 0, Qi > 0, Z > 0, R > 0, i = 1, 2, and any matrix S1 or S2 with appropriate dimension, satisfying
where
Proof: Construct the following Lyapunov–Krasovskii functional:
where
where
Based on Wirtinger inequality, we have
where
Using extended reciprocally convex matrix inequality to estimate Eq. 15 yields
where
Then, we can get
Applying Eq. 14 and Eq. 17 to Eq. 13, the following holds:
By using the Schur complement, Eqs 10, 11 are equal to the following inequalities:
which implies
Thus, it follows from Eq. 21 that
Noting that V(t) ≥ ρ‖x(t)‖2,
which implies the system (Eq. 9) is exponentially stable (Yang et al., 2020).According to the above, system (Eq. 9) is exponentially stable if Eqs 10, 11 hold. The proof is completed.
Remark 1. The method proposed in this section establishes the constraint relation between the delay information and the exponential stability of the LFC for power systems with an EV aggregator, which can be used to analyze the influence of delays on the stability of the system and calculate the delay margins. The margins represent the time delay tolerance range of the system to ensure exponential stability, which is composed of the delay lower bound h1 and delay upper bound h2.
Remark 2. In Theorem 1, the LFC for power systems with an EV aggregator is exponentially stable if Eqs 10, 11 are satisfied. The calculation steps of the delay margins for the stability of the system can be briefly summarized as follows:
1) Construct the LFC closed-loop model for power systems with an EV aggregator and a PID controller.
2) Choose the values of α, the EV aggregator gain KEV, and the allowable lower bound h1.
3) Calculate the delay margin h2 of the power system by using the binary search technique (Zhang et al., 2013) and MATLAB/LMI toolbox to solve the LMIs in Theorem 1.
Case studies of LFC for power systems with an EV aggregator are presented to verify the advantage of the proposed method and study the influence of PID controller and EV aggregator gains on the delay margins. The related parameters of the system are shown in Table 1.
The method proposed by Jiang et al. (2012) is used to verify the advantage of the proposed method. Set h1 = 0, α = 0, Kd = 0, and kEV = 1, and the system can be considered asymptotically stable if the conditions in Theorem 1 are true. Then, the delay margins of the method proposed in this paper are compared with the delay margins of time-varying delay (μ = 0.9) in the study of Jiang et al. (2012). It is clear from Table 2 that the results of the proposed method are less conservative.
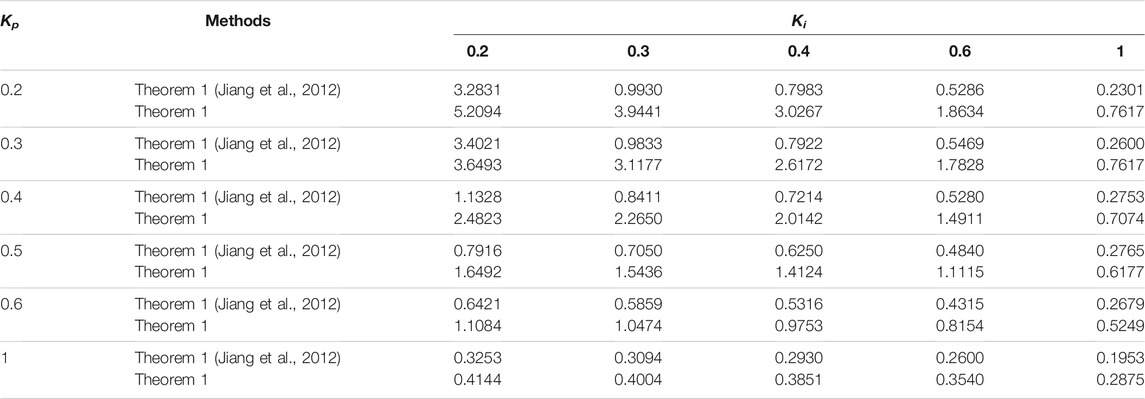
TABLE 2. Delay margins for different methods.
The gains of the PID controller and EV aggregator have an important effect on the delay margins of the LFC for power systems with an EV aggregator. Firstly, let h1 = 0, α = 0.01, kEV = 1, and PID controller parameters K be different; the delay margins of the system are obtained, and the related results are shown in Tables 3–5.

TABLE 3. Delay margins for Kd = 0.

TABLE 4. Delay margins for Kd = 0.2.

TABLE 5. Delay margins for Kd = 0.5.
As shown in Table 3, when Kd = 0 (PI controllers), for fixed Kp, the delay margins decrease gradually with the increase of Ki. For fixed Ki, with the increase of Kp, the delay margins decrease gradually. As can be seen from Tables 3–5, when Kd is not 0 (PID controllers), the delay margins gradually become smaller with the gradual increase of Kd. For fixed Kp, the delay margins increase gradually with the increase of Ki; for fixed Ki, the delay margins decrease as Kp increases. To sum up, the delay margins under PI controllers are larger than that under the PID controller. The larger Kp or Kd is, the smaller delay margins are.
Then, the frequency deviations of LFC for power systems with an EV aggregator under the delay of 5.15s and different PID controller gains are simulated. It is assumed that the power deviations of load and WTG fluctuate randomly in the range of 0.19–0.21 p. u. and 0.49–0.51 p. u., respectively. As shown in Figure 2, when K = [0.2 0.2 0], the system is stable. When Kp and Ki decrease (K = [0.1 0.1 0]), the frequency deviation also tends to zero. But when Kp and Ki are increased (K = [0.4 0.4 0]), or Kd is increased (K = [0.2 0.2 0.5]), it is clear that the frequency deviations do not converge in these cases. Therefore, Figure 2 validates the analysis in Tables 3–5, and appropriate selection of PID controller gains K is very important for the stability of LFC for power systems with an EV aggregator.
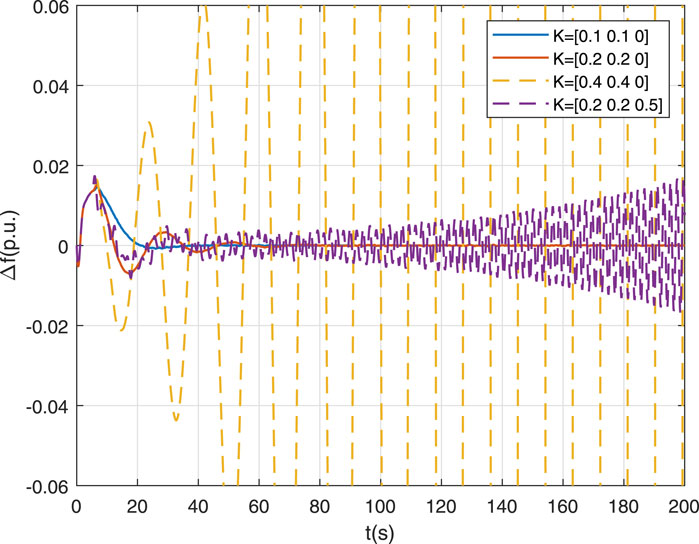
FIGURE 2. Frequency deviations for different K.
Finally, the gain of the EV aggregator KEV is also an important factor affecting the delay margins of LFC for power systems with an EV aggregator. As shown in Table 6, regardless of how the gains of the PID controller change, the delay margins of the delayed LFC system with an EV aggregator and intermittent wind energy decrease with the increase of KEV.

TABLE 6. Delay margins for different values of KEV and K.
In this paper, the LFC stability of delayed power systems with an EV aggregator was studied. The LFC of the power system was modeled as a delayed linear system with an EV aggregator. Based on Lyapunov stability theory and the linear matrix inequality approach, a new stability criterion was proposed by using Wirtinger inequality and improved inverse convex matrix inequality. Finally, the influence of EV aggregator gains and PID controller gains on the delay margins was studied, and some case studies have shown the advantage of the results. The research of this paper can solve the delay margins more accurately and guide the design of PID controllers of LFC for power systems with an EV aggregator effectively.
The original contributions presented in the study are included in the article/Supplementary Material, and further inquiries can be directed to the corresponding author.
All authors listed have made a substantial, direct, and intellectual contribution to the work and approved it for publication.
This work was supported by the China Postdoctoral Science Foundation–funded project under Grant No. 2021M692992.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Dong, C., Xiao, Q., Wang, M., Morstyn, T., McCulloch, M. D., and Jia, H. (2020). Distorted Stability Space and Instability Triggering Mechanism of Ev Aggregation Delays in the Secondary Frequency Regulation of Electrical Grid-Electric Vehicle System. IEEE Trans. Smart Grid 11, 5084–5098. doi:10.1109/TSG.2020.3008333
Jia, H., Li, X., Mu, Y., Xu, C., Jiang, Y., Yu, X., et al. (2018). Coordinated Control for Ev Aggregators and Power Plants in Frequency Regulation Considering Time-Varying Delays. Appl. Energ. 210, 1363–1376. doi:10.1016/j.apenergy.2017.05.174
Jiang, L., Yao, W., Wu, Q. H., Wen, J. Y., and Cheng, S. J. (2012). Delay-dependent Stability for Load Frequency Control with Constant and Time-Varying Delays. IEEE Trans. Power Syst. 27, 932–941. doi:10.1109/TPWRS.2011.2172821
Jin, L., He, Y., Zhang, C.-K., Shangguan, X.-C., Jiang, L., and Wu, M. (2021a). Novel Structure-Exploiting Techniques Based Delay-dependent Stability Analysis of Multi-Area Lfc with Improved Numerical Tractability. IEEE Trans. Power Syst. 36, 4194–4211. doi:10.1109/TPWRS.2021.3056594
Jin, L., He, Y., Zhang, C.-K., Shangguan, X.-C., Jiang, L., and Wu, M. (2021b). Robust Delay-dependent Load Frequency Control of Wind Power System Based on a Novel Reconstructed Model. IEEE Trans. Cybernetics, 1, 12. doi:10.1109/TCYB.2021.3051160
Jin, L., Zhang, C.-K., He, Y., Jiang, L., and Wu, M. (2019). Delay-dependent Stability Analysis of Multi-Area Load Frequency Control with Enhanced Accuracy and Computation Efficiency. IEEE Trans. Power Syst. 34, 3687–3696. doi:10.1109/TPWRS.2019.2902373
Khalil, A., Rajab, Z., Alfergani, A., and Mohamed, O. (2017). The Impact of the Time Delay on the Load Frequency Control System in Microgrid with Plug-In-Electric Vehicles. Sustain. Cities Soc. 35, 365–377. doi:10.1016/j.scs.2017.08.012
Ko, K. S., and Sung, D. K. (2019). The Effect of Cellular Network-Based Communication Delays in an Ev Aggregator’s Domain on Frequency Regulation Service. IEEE Trans. Smart Grid 10, 65–73. doi:10.1109/TSG.2017.2731846
Ko, K. S., and Sung, D. K. (2018). The Effect of Ev Aggregators with Time-Varying Delays on the Stability of a Load Frequency Control System. IEEE Trans. Power Syst. 33, 669–680. doi:10.1109/TPWRS.2017.2690915
Li, X., Yu, X., Jia, H., Mu, Y., Wu, J., Wang, M., et al. (2019). Structure Constrained Controller Design for Power Plants and Ev Aggregator in Frequency Regulation Considering Time Delays. Energ. Proced. 158, 2966–2971. doi:10.1016/j.egypro.2019.01.961
Naveed, A., Sönmez, Զ., and Ayasun, S. (2019a). Identification of Stability Delay Margin for Load Frequency Control System with Electric Vehicles Aggregator Using Rekasius Substitution. IEEE Milan PowerTech. 1, 6. doi:10.1109/PTC.2019.8810662
Naveed, A., Sönmez, Զ., and Ayasun, S. (2021). Impact of Electric Vehicle Aggregator with Communication Time Delay on Stability Regions and Stability Delay Margins in Load Frequency Control System. J. Mod. Power Syst. Clean Energ. 9, 595–601. doi:10.35833/MPCE.2019.000244
Naveed, A., Zerdali, E., Sönmez, Զ., and Ayasun, S. (2019b). “Optimization of Pi Controller Gains Using Genetic Algorithm for Time-Delayed Load Frequency Control Systems with Electric Vehicles Aggregator,” in 2019 11th International Conference on Electrical and Electronics Engineering (ELECO), 28-30 November, 2019, Bursa, Turkey. doi:10.23919/ELECO47770.2019.8990434
Peng, C., Zou, J., Lian, L., and Li, L. (2017). An Optimal Dispatching Strategy for V2g Aggregator Participating in Supplementary Frequency Regulation Considering Ev Driving Demand and Aggregator’s Benefits. Appl. Energ. 190, 591–599. doi:10.1016/j.apenergy.2016.12.065
Pinto, J., Carvalho, A., and Morais, V. (2021). Power Sharing in Island Microgrids. Front. Energ. Res. 8, 360. doi:10.3389/fenrg.2020.609218
Seuret, A., and Gouaisbaut, F. (2013). Wirtinger-based Integral Inequality: Application to Time-Delay Systems. Automatica 49, 2860–2866. doi:10.1016/j.automatica.2013.05.030
ShangGuan, X.-C., He, Y., Zhang, C.-K., Jin, L., Jiang, L., Wu, M., et al. (2021). Switching System-Based Load Frequency Control for Multi-Area Power System Resilient to Denial-Of-Service Attacks. Control. Eng. Pract. 107, 104678. doi:10.1016/j.conengprac.2020.104678
Shangguan, X.-C., He, Y., Zhang, C.-K., Jin, L., Yao, W., Jiang, L., et al. (2021a). Control Performance Standards-Oriented Event-Triggered Load Frequency Control for Power Systems under Limited Communication Bandwidth. IEEE Trans. Control. Syst. Tech. 1, 9. doi:10.1109/TCST.2021.3070861
Shangguan, X.-C., Zhang, C.-K., He, Y., Jin, L., Jiang, L., Spencer, J. W., et al. (2021b). Robust Load Frequency Control for Power System Considering Transmission Delay and Sampling Period. IEEE Trans. Ind. Inform. 17, 5292–5303. doi:10.1109/TII.2020.3026336
Shi, Q., Liu, L., Wang, Y., Lu, Y., Zou, Q., Zhang, Q., et al. (2021). Cooperative Synthetic Inertia Control for Wind Farms Considering Frequency Regulation Capability. Front. Energ. Res. 9, 501. doi:10.3389/fenrg.2021.738857
Tek, B., Sönmez, Զ., and Ayasun, S. (2020). “Delay-dependent Stability Analysis of a Two-Area Load Frequency Control System Including Electric Vehicle Aggregator and Dynamic Demand Response,” in 2020 12th International Conference on Electrical and Electronics Engineering (ELECO), 26-28 November, 2019, Bursa, Turkey, 178–182. doi:10.1109/ELECO51834.2020.00035
Teng, W., Wang, Y., Sun, S., Cheng, Y., Yu, P., and Wang, S. (2021). Robust Stability Control for Electric Vehicles Connected to Dc Distribution Systems. Front. Energ. Res. 9, 423. doi:10.3389/fenrg.2021.740698
Yang, B., Hao, M., Wang, R., Zhao, X., and Zong, G. (2020). Exponential Stability of Delayed Generalized Neural Networks with Intermittent Large-Delay Periods. IEEE Trans. Syst. Man, Cybernetics: Syst. 1, 11. doi:10.1109/TSMC.2020.2967506
Zhang, C.-K., He, Y., Jiang, L., Wu, M., and Wang, Q.-G. (2017). An Extended Reciprocally Convex Matrix Inequality for Stability Analysis of Systems with Time-Varying Delay. Automatica 85, 481–485. doi:10.1016/j.automatica.2017.07.056
Zhang, C.-K., Jiang, L., Wu, Q. H., He, Y., and Wu, M. (2013). Delay-dependent Robust Load Frequency Control for Time Delay Power Systems. IEEE Trans. Power Syst. 28, 2192–2201. doi:10.1109/TPWRS.2012.2228281
Zhou, B., Xu, D., Li, C., Chung, C. Y., Cao, Y., Chan, K. W., et al. (2018). Optimal Scheduling of Biogas–Solar–Wind Renewable Portfolio for Multicarrier Energy Supplies. IEEE Trans. Power Syst. 33, 6229–6239. doi:10.1109/TPWRS.2018.2833496
Keywords: power system, load frequency control, electric vehicles, stability analysis, time delay
Citation: Yuan Z-L, Xu D, Jin L and Wang H-Z (2021) Delay-Dependent Stability Analysis of Load Frequency Control for Power System With EV Aggregator. Front. Energy Res. 9:771465. doi: 10.3389/fenrg.2021.771465
Received: 06 September 2021; Accepted: 23 September 2021;
Published: 26 October 2021.
Edited by:
Yaxing Ren, University of Warwick, United KingdomReviewed by:
Jian Chen, Yancheng Institute of Technology, ChinaCopyright © 2021 Yuan, Xu, Jin and Wang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Da Xu, eHVkYUBjdWcuZWR1LmNu
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.