 Wenqiang Yang1
Wenqiang Yang1 Zhanlei Peng
Zhanlei Peng Muhammad Ilyas Menhas
Muhammad Ilyas Menhas- 1 School of Mechanical and Electrical Engineering, Henan Institute of Science and Technology, Xinxiang, China
- 2 Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences, Shenzhen, China
- 3 Department of Electrical Engineering, Mirpur University of Science and Technology (MUST), Mirpur, Pakistan
Massive popularity of plug-in electric vehicles (PEVs) may bring considerable opportunities and challenges to the power grid. The scenario is highly dependent on whether PEVs can be effectively managed. Dynamic economic dispatch with PEVs (DED with PEVs) determines the optimal level of online units and PEVs, to minimize the fuel cost and grid fluctuations. Considering valve-point effects and transmission losses is a complex constrained optimization problem with non-smooth, non-linear, and non-convex characteristics. High efficient DED method provides a powerful tool in both power system scheduling and PEVs charging coordination. In this study, firstly, PEVs are integrated into the DED problem, which can carry out orderly charge and discharge management to improve the quality of the grid. To tackle this, a novel real-coded genetic algorithm (RCGA), namely, dimension-by-dimension mutation based on feature intervals (GADMFI), is proposed to enhance the exploitation and exploration of conventional RCGAs. Thirdly, a simple and efficient constraint handling method is proposed for an infeasible solution for DED. Finally, the proposed method is compared with the current literature on six cases with three scenarios, including only thermal units, units with disorderly PEVs, and units with orderly PEVs. The proposed GADMFI shows outstanding advantages on solving the DED with/without PEVs problem, obtaining the effect of cutting peaks and filling valleys on the DED with orderly PEVs problem.
Introduction
The Optimization Problem
Over the last few decades, the rapid increase in the use of fossil fuel has led to a consequential worldwide reduction of the resource; thus, its optimal utilization in power generation has become an important research topic (Niu et al., 2014; Yang et al., 2015). In addition, massive popularity of PEVs may bring opportunities or challenges to the power grid. Therefore, the DED with PEVs plays an important role in power systems operation and control. Coupling with space and time, it is a complicated optimal decision problem, and its goal is to minimize the fuel cost and fluctuation of the power grid, on the premise of satisfying a series of constraints.
The DED problem was first introduced in 1971 by Bechert and Kwanty (Niu et al., 2014) and an extension of static economic dispatch (SED), taking into account ramp rate limits. Owing to the inertia of thermal units, the output from the units is not changed significantly from one operating hour to the next, which can avoid shortening the life of the units (Elaiw et al., 2013). The fuel cost function is a highly discontinuous, nonlinear, and non-convex curve, due to the valve-point effect (VPE) of the steam turbine (Shen et al., 2019), and the transmission loss should not be ignored on a large scale of the power system. As a mobile, distributed energy storage, PEVs charge from the grid through the grid to vehicle technology (G2V), and feedback to the grid through the vehicle to gird technology (V2G) (Wang et al., 2019a). So, VPE, transmission losses, and PEVs make the DED model more complicated, but more accurate.
Over the past few years, optimization methods based on artificial intelligence have been successfully and popularly applied to DED. Meta-heuristic algorithms do not care certain mathematical properties of the objective function such as continuous, differentiability, and convex, compared with traditional techniques. They include simulated annealing (SA) (Panigrahi et al., 2007), genetic algorithm (GA), particle swarm optimization (PSO) (Sawyerr et al., 2011), differential evolution (DE), artificial immune system (AIS) (Hemamalini and Simon, 2011a; Basu, 2011), cuckoo search (CS) (Mellal and Williams, 2020), artificial bee colony (ABC) (Hemamalini and Simon, 2011b; Tehzeeb-ul-Hassan et al., 2020), harmony search (HS) (Ravikumar Pandi and Panigrahi, 2011; Chakraborty et al., 2012; Li et al., 2019), an efficient fitness-based differential evolution (EFDE) (Shen et al., 2019), hybrid different evolution (DE), sequential quadratic programming (SQP), and hybrid PSO and SQP (Elaiw et al., 2013). However, few scholars integrate PEVs into the DED problem to perform effective management considering network loss. Panpan M. et al. manage the charging and discharging of PEVs through the scene method in the problem (Yang et al., 2014; Mei et al., 2019). Behera et al. (2019) ignored two important constraints: the power balance constraint and the ramp rate limit.
The Optimization Algorithm
Since GA was proposed by Holland in 1975 (Ali et al., 2018), which has undergone two revisions: the binary-coded genetic algorithm (BCGA) and real-coding genetic algorithm (RCGA). RCGA was first suggested by Herrera in 1998 (Akopov et al., 2019; Iyer et al., 2019). It is known that its performance depends heavily on crossover and mutation operators (Thakur et al., 2014), and then scholars mainly focused on the improvement of crossover and mutation operators and proposed many excellent variants of RCGA.
The crossover operator generates new individuals through interactive information among existing ones (Nakane et al., 2020). Arithmetic crossover (AX) (Naqvi et al., 2020) produces offspring through the linear combination of the parents. By flat crossover (FX) (Picek et al., 2013a), the parents exchange genes to produce offspring, but it does not destroy genetic information in the population. In LX (Deep and Thakur, 2007), Laplace distribution is used as the density function to generate genes near the parents. In 1993, Eshelman et al. used the concept of interval schemata to develop a blend crossover operator (BLX-α) (Wang et al., 2019b), which can do linear exploration around the parents. SPX is a multi-paternal crossover operator based on the nature of the simplex and is an extension of BLX (Chuang et al., 2015). SBX (Naqvi et al., 2020), as its name implies, is formed by simulating binary crossover operator; UNDX can produce two or more offspring individuals from three parents (Kwak and Lee, 2016). The comparative research results have been reported in the literature (Picek et al., 2013b; Naqvi et al., 2020) for the above-mentioned crossover operators.
Mutation is the important operation responsible for exploration in RCGA (Wang et al., 2018), especially the local development. The popular and widespread mutation operators in the literature mostly use a certain distribution as a density function to generate random numbers around the gene to vary, so as to carry out the local development of the gene, which may lead to a lot of troubles in the application of the algorithm due to the introduction of extra parameters, such as the random mutation (RM), the non-uniform mutation (NUM) (Wang et al., 2019b), the power mutation (PM), the polynomial mutation (PLM), the Gaussian mutation (GM) (Wang et al., 2019b), and Cauchy mutation (CM). In addition, the direction mutation is presented (Tang and Tseng, 2013), which mutates toward a promising area by utilizing statistical population information and has achieved good results. On the basis of previous studies, two simple and efficient mutation operators are proposed. One is the dimension-by-dimension mutation based on feature intervals (DMFI), which combines horizontal search at the component level with the rule of greed to form a directional horizontal local development strategy; what is more, the genetic characteristics of outstanding individuals are extracted as the variation interval, thereby providing a directional vertical local development capability. The other is the uniform mutation based on the interval of opposing features (UMOFI); the opposing of feature intervals of outstanding individuals is employed as the variation interval for the inferior individuals, thereby introducing new information in the population.
At present, genetic algorithms have the defects of falling into local optimal and lack of exploration capabilities for large-scale and high-dimensional problems (Sawyerr et al., 2011; Fang et al., 2014; D’Angelo and Palmieri, 2021; Sawyerr et al., 2014). In the final analysis, this is a fundamental and difficult problem faced by metaheuristics: how to balance the exploration and exploitation of the algorithm. In general, researchers design or improve an algorithm based on the idea that focuses on exploration in the early stage and later on exploitation. However, if the development capability is not enough to find the global optimal area in the early stage, it will become stuck in the local optimal. Given this, this study provides a new solution, based on the idea of collaborative optimization of the superior and inferior individuals, in which excellent individuals strengthen local search. Inferior individuals are responsible for introducing new information to increase the diversity of the population. Then, interacting information between excellent individuals and inferior individuals helps to find outstanding individuals and realizing their comprehensive development carried out in each iterative.
The characteristics of GA’s mechanisms and the new solutions mentioned above are consistent on the issue of balancing the global and local search capabilities. Therefore, an RCGA based on co-optimization of superior and inferior individuals is proposed: 1) through the rank selection and the flat crossover to realize the genetic interaction between superior and inferior populations, 2) using DMFI to obtain the ability of directed vertical and horizontal local development for excellent individuals and achieve in-depth local search, and 3) using UMOFI for the inferior individuals, which is controlled by the mutation probability
Constraint Handling Methods
For constraint optimization problems, the feasibility of the solutions is more important than the objective values. The penalty function method is common and popular for handling some constraints (Shen et al., 2019). However, it is a troublesome thing to choose a suitable penalty factor. Hence, some scholars proposed several types of repair methods to meet problem constraints. Feasibility-based rules are used to lead the search toward the feasible region to handle inequality constraints effectively (Yuan et al., 2009), which is more efficient to filter feasible solutions and ease the burden of setting the penalty factor compared to the penalty function method. However, for optimization problems with equality constraints, owing to feasible solutions occupying an extremely small proportion of the solution space, it is difficult to repair by screening feasible solutions and guiding infeasible solutions. Heuristics for handling constraints perform excellently to deal with equality constraints without considering the transmission loss (Wang et al., 2011). They adjust the output power according to general experience to gradually reduce the violation of the constraint until it becomes a feasible solution, whereas this cannot efficiently solve complex equality constraints, for instance, the power balance constraint with the transmission loss, and there may be an excessive adjustment, especially when the amount of violation is not big. The forced repair technology refers to adjusting the output strictly according to the characteristics of the equation, which greatly improves repair efficiency of equality constraints (Panigrahi et al., 2007; Zou et al., 2018). Apart from equality limits, inequality constraints also influence the feasibility, and hence the forced repair technology may spend more time solving the quadratic equation of DED with transmission losses. In Li et al. (2019) and Shen et al. (2019), the constraints handling technology combining a heuristic repair technology and the forced repair technology is proposed, which enhances the capability of repairing infeasible solutions.
In summary, the methods or techniques above-mentioned have the following shortcomings in solving DED with PEVs: 1) the algorithms are difficult to solve large-scale problems or face premature phenomena and 2) constraint processing techniques are difficult to repair infeasible solutions or do not work well with the algorithm. In view of this, this study proposed GADMFI based on RCGA. Meanwhile, a simple and efficient constraint processing technique is designed.
The remainder of this study is arranged as follows: The Formulation of the Dynamic Economic Dispatch With Plug-In Electric Vehicles gives the mathematical formulation of the DED with PEVs. Genetic Algorithm Dimension Mutation Based on Feature Intervals describes GADMFI in detail. In Constraints Handling Method, the constraint handling methods are proposed. The Implementation of Genetic Algorithm Dimension Mutation Based on Feature Intervals for Dynamic Economic Dispatch With Plug-In Electric Vehicles presents the implementation of GADMFI on the DED problem. Experimental Results and Analysis designs and analyzes experiments. Finally, the study ends with conclusions and further research work.
The Formulation of the Dynamic Economic Dispatch With Plug-In Electric Vehicles
The DED integrating PEVs aims to determine the optimal generation levels of all online units and PEVs, during a specified period of time (e.g., 24 intervals a day), so as to minimize the total fuel cost and subject to a number of equality and inequality constraints.
The Optimization Objectives
There are two optimization objectives for this problem: one is to minimize fuel costs and the other is to minimize the fluctuation of the grid, that is, maximize peak shaving and valley filling. They are described in Eqs. 1, 2.
where
Constraints
The DED with PEVs is an optimization problem containing multiple inequalities and equality constraints, including capacity constraints, ramp rate limits, PEVs charge/discharge limits, PEVs demand limits, and power balance constraints.
Capacity Constraints
The capacity limits of the thermal unit are inequality constraints, which are determined by the physical characteristics of the unit and are given as follows:
where
Ramp Rate Limits
Due to the inertia of thermal power units, the ramp rate limits are considered to extend the service life of the units; that is, the output of the unit cannot be adjusted greatly in a short time, and the output of current time will affect the output of the next time:
where
Plug-In Electric Vehicles Charge/Discharge Limits
The maximum charging power and discharging power of PEVs should be limited to a normal range. Because different types of electric vehicles have different models, the charging and discharging power of PEVs at t time is described as a variable
The Plug-In Electric Vehicles Demand Constraint
For users’ daily travel, the PEVs demand constraint should be met (Yang et al., 2017a), which is described as Eq. 6:
where
The Power Balance Constraint
Power balance limit is the most important and complex constraint, especially considering the transmission loss, which is defined as
where
where
Proposed Genetic Algorithm Dimension-by-Dimension Mutation Based on Feature Intervals
RCGAs generally consist of selection, crossover, mutation, and elite retention strategies, and the pseudo-code is summarized in Table 1. Without destroying its main structure and extra parameters, this study proposes a simple and efficient, superior and inferior population collaborative optimization algorithm, namely, a novel real-coded genetic algorithm: GADMFI. Its pseudo-code is shown in Table 2. It is worth noting that this study takes the minimum value of the function as the optimization objective.
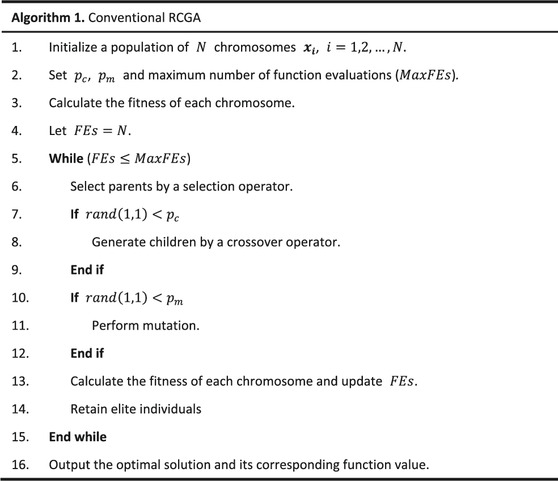
TABLE 1. The pseudo-code of conventional RCGA
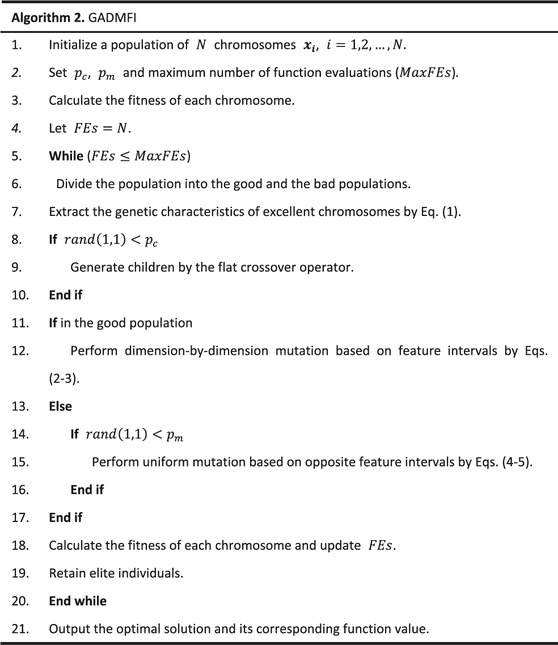
TABLE 2. The pseudo-code of the proposed GADMFI.
In the study, two novel mutation operators are proposed: the dimension-by-dimension mutation based on feature intervals (DMFI) and the uniform mutation based on the interval of opposite features (UMOFI). DMFI and UMOFI are designed based on the idea that excellent individuals strengthen local exploitation capabilities, to improve the convergence accuracy and speed of the algorithm; low-quality individuals introduce new information, to improve population diversity; and good and bad individuals exchange information by an interactive operation. Excellent individuals perform DMFI to strengthen local development in both vertical and horizontal dimensions. Inferior individuals introduce new genes through UMOFI. Then, the information of the two is exchanged through the ranking selection (RS) and FX, so as to achieve the effect of collaborative optimization.
The Selection and Crossover Operator
The selection operator is the first operator of GA. One of the most widely used selection operators is the roulette selection. The higher the fitness, the greater the probability of being selected. However, the excellent genes of the inferior individuals may be abandoned. The other most commonly used is RS (Chuang et al., 2016). Excellent individuals are used as the parent 1 to cross, and inferior individuals are used as the parent 2. All individuals participate in the crossover with the same probability, which does not affect the diversity of the population. RS is used in the study; however, the difference between this study and the literature (Chuang et al., 2016) is random matching for the individuals, thus enhancing the population diversity.
The flat crossover (FX) is rarely used due to its poor local development ability, but it has the characteristics of not changing the genetic information in the population that other operators do not have. It can maintain the diversity of the population and the interaction between individuals. The role of RS and FX is to carry out information interaction between individuals without changing the genetic information of the population.
The Mutation Operator
Strong local search capabilities should be possessed for each stochastic algorithm. At the same time, it is also indispensable to maintain the diversity of the population. In order to illustrate the design idea of the mutation operator, horizontal search and vertical search are firstly defined. If there is a comparison between the variants or a variant and ontology in an operator, it is called horizontal search of individuals. If only components are changed, it is called the vertical search of the individual. In previous related studies, local search often refers to vertical search. All the components are developed simultaneously. In this section, horizontal search and the greedy rule, vertical search, and feature intervals are combined to fulfill horizontal and vertical local search so as to obtain in-depth development for the superior population by DMFI. In addition, new population information is also introduced into the inferior population by UMOFI.
The Dimension-by-Dimension Mutation Based on Feature Intervals
The dimension-by-dimension mutation is a dimension-by-dimension search for outstanding individuals in the characteristic interval and is combined with the greedy rule to achieve a directed horizontal search. Figure 1 shows the change from one dimension to the next dimension of DMFI. A gene
where
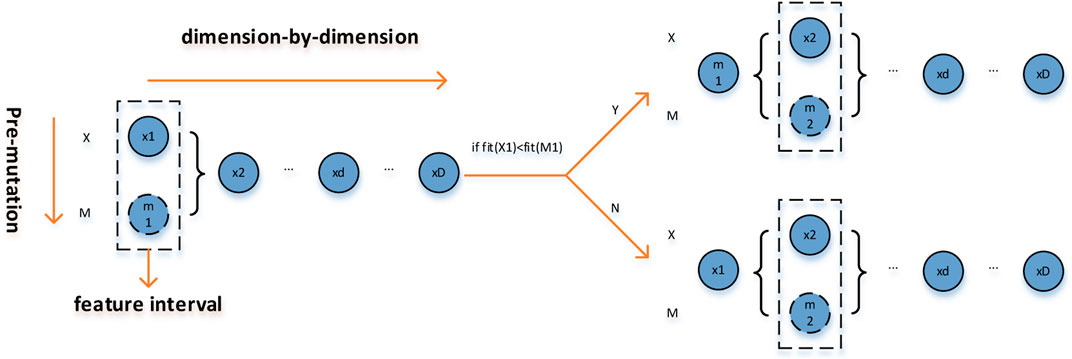
FIGURE 1. Diagram of dimension-by-dimension mutation based on feature intervals.
The Uniform Mutation Based on the Interval of Opposite Features
In order to obtain new genetic information without destroying the diversity of the population, the opposite feature intervals are utilized as the range of variation to carry out by Eqs. 13, 14 in UMOFI. What is more, UMOFI controls
where
Constraints Handling Method
Ramp Rate Limits Handling
where
The Power Balance Constraint Handling
Considering the network transmission loss, the power balance constraint is the most difficult to repair among all constraints. This study proposes a simple and efficient repair technology. The overall process is designed as two stages: firstly, rough adjustment can rapidly reduce the violation and then enter the second fine adjustment stage to eliminate the violation; the detailed steps are described as Steps 1–4.
Step 1. Set the set A =
where
Step 2. Handling the power balance constraint can be converted as solving a quadratic equation, and the output of the unit is solved by Eq. 19. Here, two cases are discussed as follows:
Otherwise, it can be converted as solving a quadratic equation, and the output of the unit is solved by Eq. 19. Here, two cases are discussed as follows:
Let a =
Case 1. If no solution, let
Case 2. If there are solutions, checking whether they satisfy the other constraints. If satisfied, let
Step 1 can rapidly decrease violation of the equality constraint associated with power balances, and Step 2 further decrease or eliminate the violation by fine adjustment as well as solving. And finally, if still infeasible, the feasible-rule (Yuan et al., 2009) is used to strictly screen the feasible solutions of the population.
The Implementation of Genetic Algorithm Dimension Mutation Based on Feature Intervals for Dynamic Economic Dispatch With Plug-In Electric Vehicles
The Implementation of GADMFI on DED integrating PEVs is a process that effectively combines heuristic algorithms and constraints handling methods and optimal mathematical model. The overall framework is described in Figure 2.

FIGURE 2. The flowchart of the implementation of GADMFI for the DED with PEVs.
Step 1. The initialization of the population consisted of
and all variables of
Step 2. Checking individuals’ feasibility. If feasible, go to the next step; otherwise, repair by constraint handling technology and go to the next step.
Step 3. Evaluate their fitness by Eq. 22, in which the objective functions
Step 4. Update individuals in the population via GADMFI, and go to Step 2
Experimental Results and Analysis
Validation of the Performance of Genetic Algorithm Dimension Mutation Based on Feature Intervals
In order to validate the performance of the algorithm, a set of benchmark functions are selected from Civicioglu (2013), which are shown in Table 3, including low-dimensional, multi-dimensional, unimodal (U), multimodal (M), separable (S), and non-separable (N) functions. Advanced meta-heuristics are employed for qualitative and quantitative comparison using the benchmark problems. They are ABC, the grey wolf optimizer (GWO) (Mirjalili et al., 2014), the whale optimization algorithm (WOA) (Mirjalili and Lewis, 2016), the bat algorithm with triangle-flipping strategy (BA-HTFS) (Cai et al., 2017), and Hybrid DE-WOA Algorithm (DEWOA) (Wang et al., 2019c). In addition, the Wilcoxon Signed-Rank Test was used for pairwise comparisons, with the statistical significance value

TABLE 3. The basic information of the six benchmark functions.
Parameters Setting
MaXFEs for 30, 50, and 100-dimensional benchmarks are set as

TABLE 4. The private parameters of the algorithms.
Performance Analysis
The performance of an optimization method should be evaluated in convergence accuracy, speed, and robustness. Therefore, the mean, best, and standard deviation of the objective values based on 30 independent runs from three dimensions 30, 50, and 100 are utilized in the quantitative analysis in Tables 5–7, and several typical qualitative graphs are shown in Figure 3.
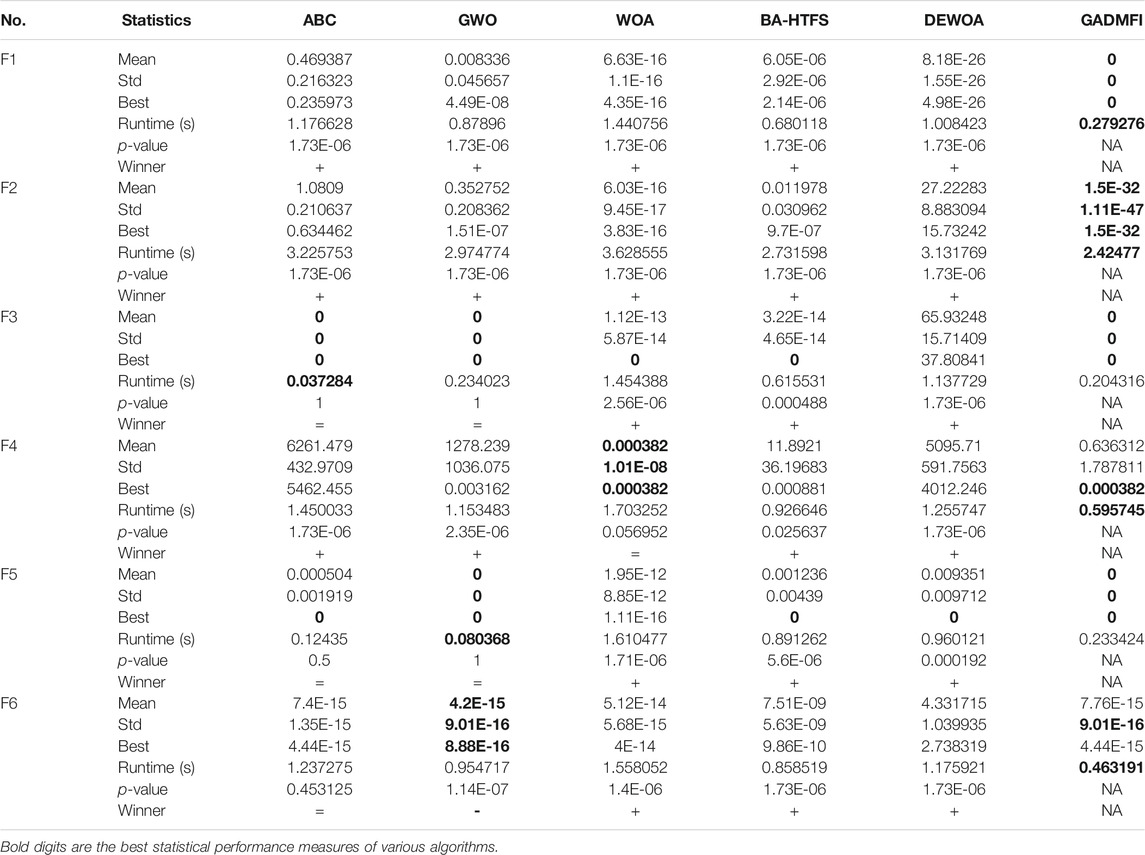
TABLE 5. The statistics data of 30 runs of the benchmarks of 30 dimensions.
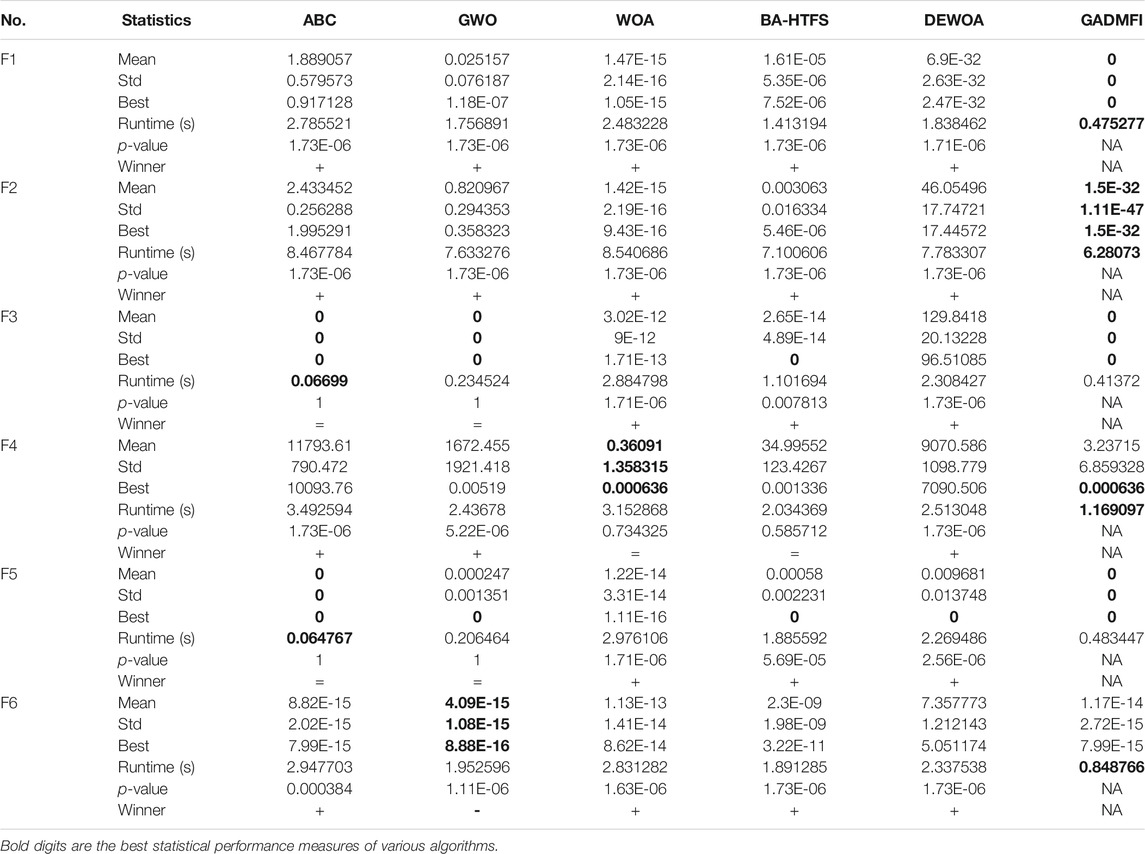
TABLE 6. The statistics data of 30 runs of the benchmarks of 50 dimensions.
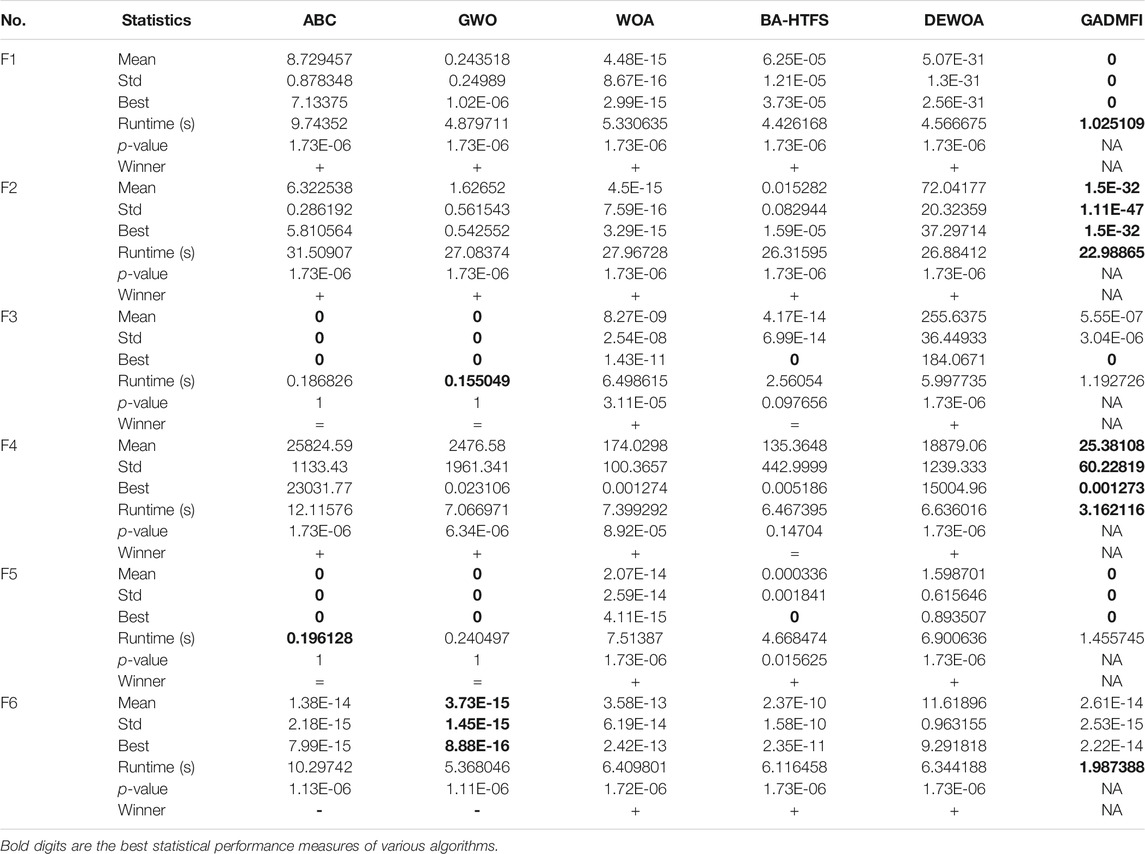
TABLE 7. The statistics data of 30 runs of the benchmarks of 100 dimension.
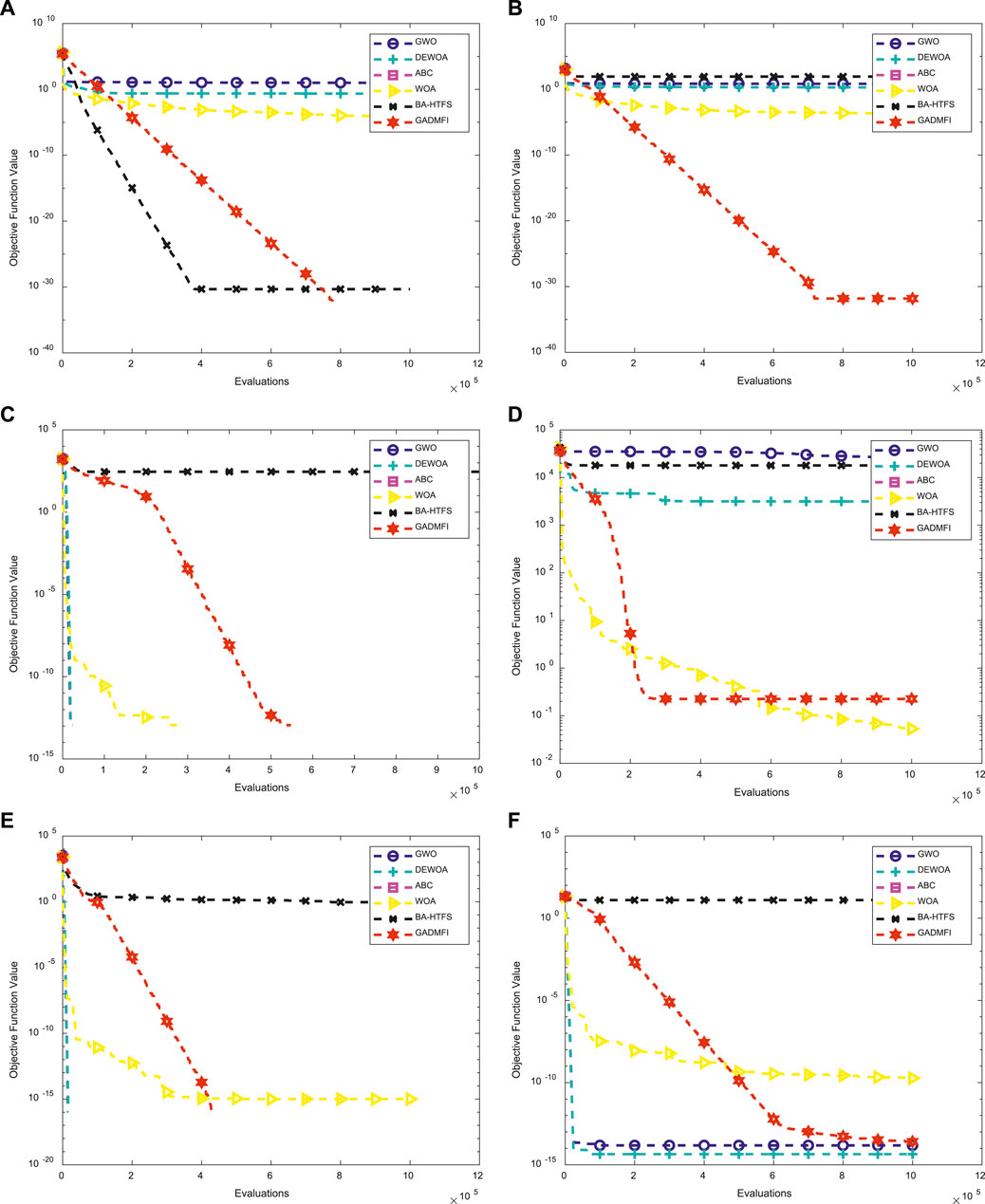
FIGURE 3. Evolution curves of six functions of 100 dimensions are shown. As can be seen, the convergence curve of the GADMFI shows superior exploration and exploitation abilities. (A) The curve presents a straight line, which shows that when dealing with unimodal problems, the proposed DMFI has the potential to explore a promising area. (B–F) With multiple local minima, it stays at approximately constant speed until it converges, which again confirms the role of DMFI.
In Tables 5–7, the optimal values of the indicators including “mean”, “Std”, and “best” are bold among the six comparative algorithms. Winner = 1, 0, and −1 mean GADMFI is obviously superior, equivalent, and inferior to other methods with
In Figure 3, evolution curves of six functions of 100 dimensions are shown. As can be seen, the convergence curve of the GADMFI shows superior exploration and exploitation abilities. In F1, the curve presents a straight line, which shows that when dealing with unimodal problems, the proposed DMFI has the potential to explore a promising area. In F2–F6 with multiple local minima, it stays at approximately constant speed until it converges, which again confirms the role of DMFI.
In summary, the proposed GADMFI has outstanding performance for the benchmark problems.
Simulation Results and Discussion on Dynamic Economic Dispatch With Plug-In Electric Vehicles Problem
In this section, in order to verify the reliability of the proposed algorithm and constraint handling method, three scenarios and six cases are considered, as described in Table 8, as follows: Scenario A: only units, Scenario B: units with disorderly PEVs, Scenario C: units with orderly PEVs. Case I: only 5 units, Case II: only 10 units, Case III: 5 units with disorderly PEVs, Case IV:10 units with disorderly PEVs, Case V: 5 units with orderly PEVs, and Case VI: 10 units with orderly PEVs. It is worth noting that PEV and transmission loss are all considered in all cases. The population size of the algorithm is 100,

TABLE 8. Six cases in three scenarios designed to verify the performance of GADMFI in DED with PEVs.
Scenario A: Only Units Without Plug-In Electric Vehicles
The data of Cases I-II are derived from (Basu, 2008; Mohammadi-ivatloo et al., 2012; Qian et al., 2020), including predicted power demand (
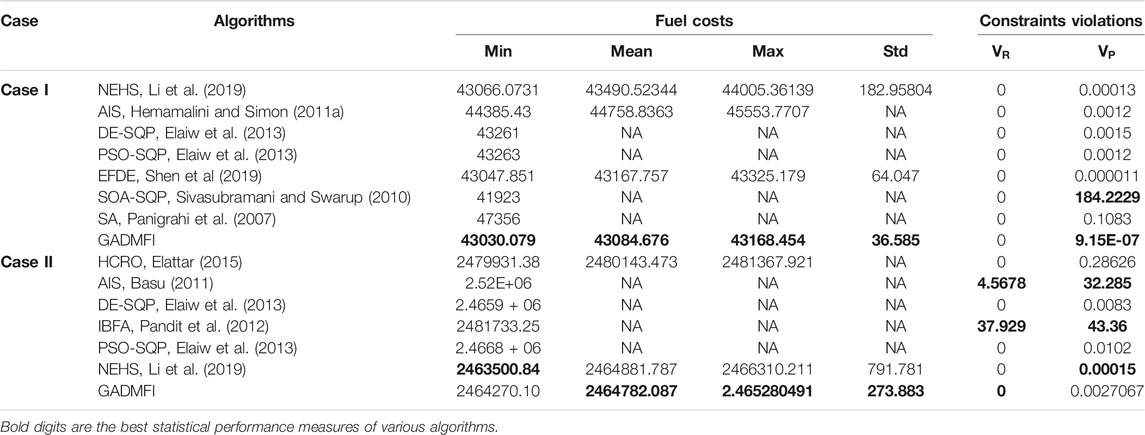
TABLE 9. Specific results of several algorithms for solving the DED without PEVs problem.
In Table 9, the minimum, average, maximum, and standard deviation of fuel cost of 30 independent trials are presented, as well as the number of violations of unit ramp rate limits and the power balance constraint. Here, the minimum value of each statistic is bold in black font. the constraint violation amount is greater than one and is bold in red font, indicating that the solution is not feasible. For constrained optimization problems, judging the quality of a solution must first meet the conditions of a feasible solution and then evaluate the value of the objective function. Obviously, in the two cases, the proposed constraint processing technology can efficiently repair infeasible solutions. In addition, compared with other algorithms in the literature, except for the minimum value in Case II, it is slightly inferior to NEHS, and GADMFI shows extremely high superiority.
In order to clearly show the output of each unit, the stacked histogram of 10 units is drawn. The impact of the ramp rate limit on the output of the unit can be clearly seen in Figure 4; that is, the power difference between two adjacent moments within the smaller ranges and the optimal solution of 30 trails for Cases I-II are shown in Tables 10-11, as well as the transmission loss (
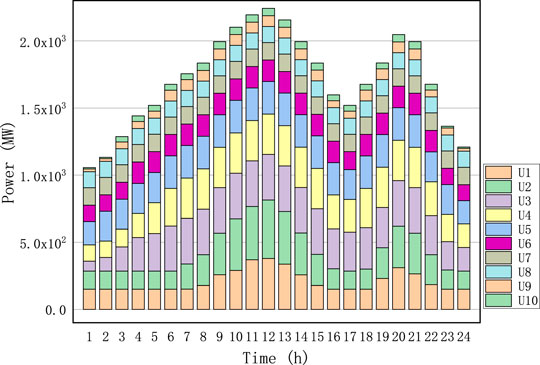
FIGURE 4. The power output of the only 10-unit power system.
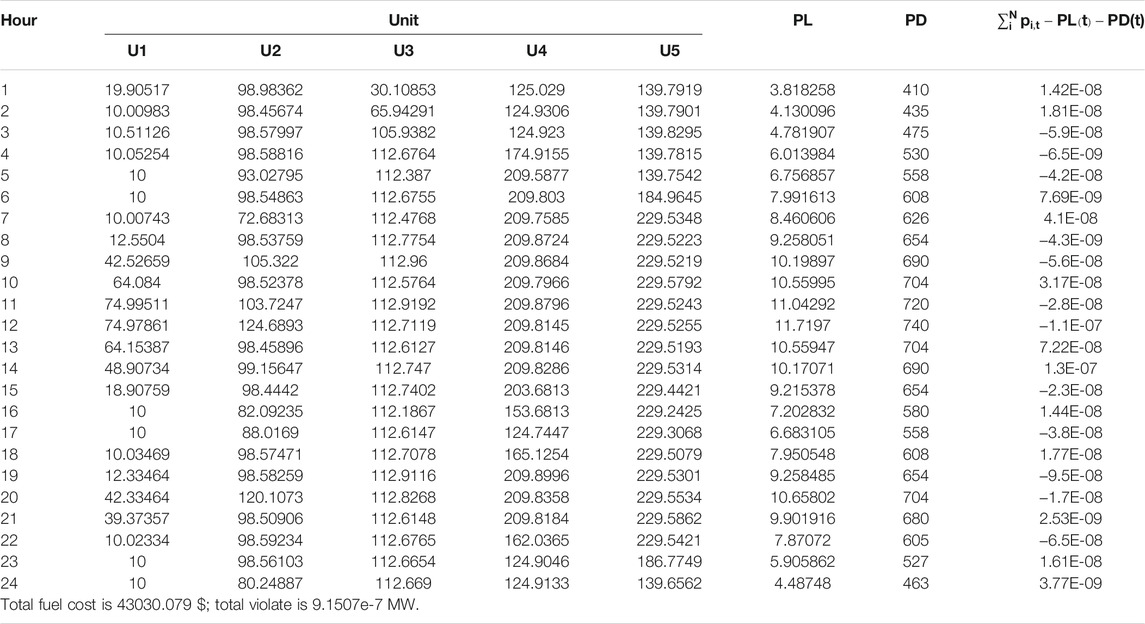
TABLE 10. The optimal solution information for Case I: only 5-unit power system.
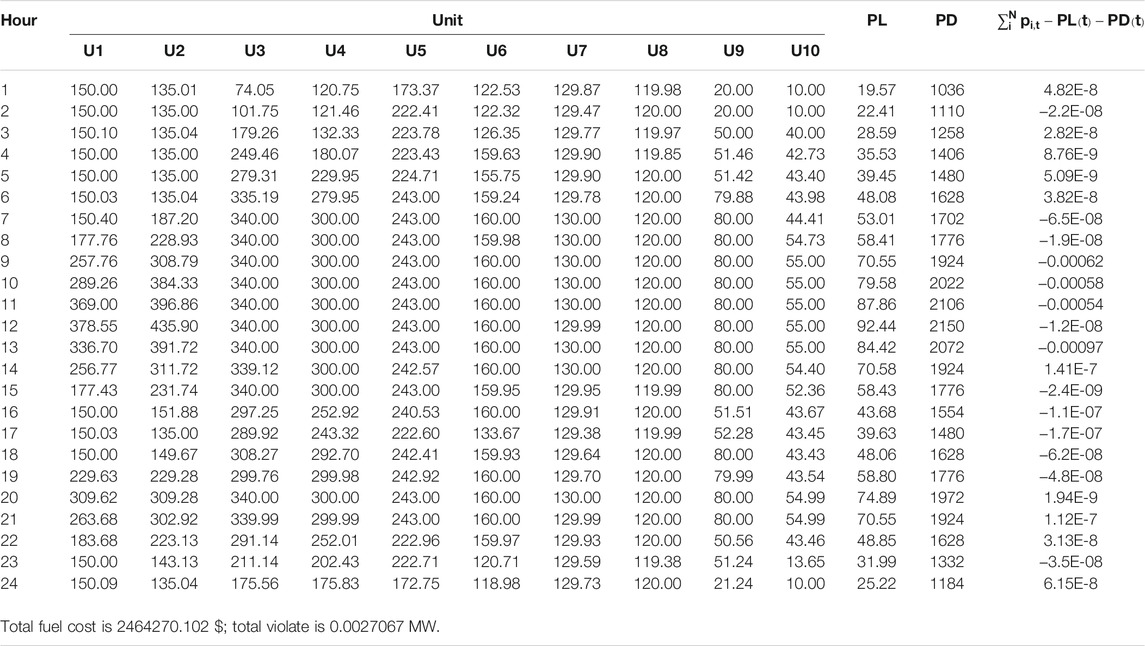
TABLE 11. The optimal solution information for Case II: only 10-unit power system.
Scenarios B and C: Units With Plug-In Electric Vehicles
A total of 50,000 PEVs are assumed to be integrated into the 5- and 10-unit power systems, and the daily average traveling distance and expected power demand of a PEV are 32.88 miles and 8.22 kWh, respectively (Saber and Venayagamoorthy, 2011). The total power necessity for PEVs is 411 MW and is expected to be met by power generation. The state of charge SOC is 50%; the number of PEVs that can provide V2G/G2V service is 50000/36125; the average battery capacity is 15 kWh; the charging efficiency and the discharge efficiency are both 85%; and available PEVs are 20% (Yang et al., 2017b). In that way, the maximum discharge power
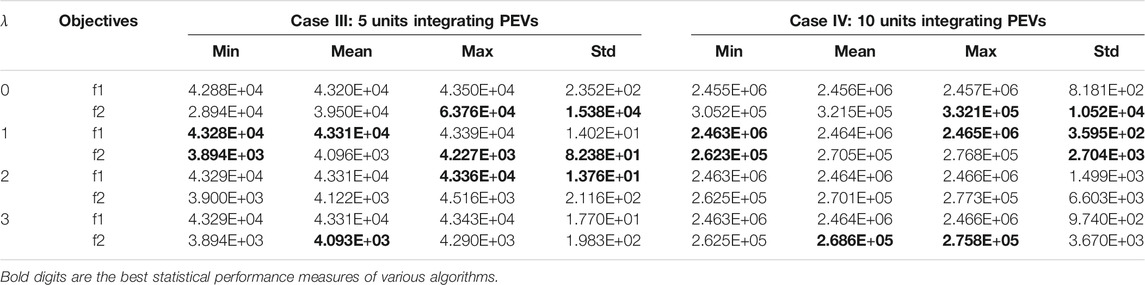
TABLE 12. Statistics of 30 trials in Scenario B, units with disorderly PEVs, and Scenario C, units without orderly PEVs with different
In the column of Max and Std, the larger value is marked in red, indicating that the quality of the solution is poor and unstable, which reflects that the grid fluctuates greatly when electric vehicles are not managed, and further, in λ = 1, 2, 3, when the balance effect is best for
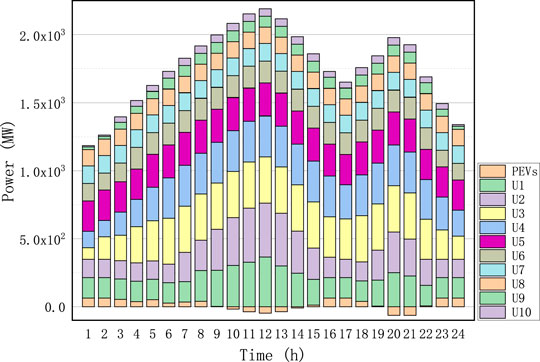
FIGURE 5. The power output of the 10 units with an orderly PEVs power system.
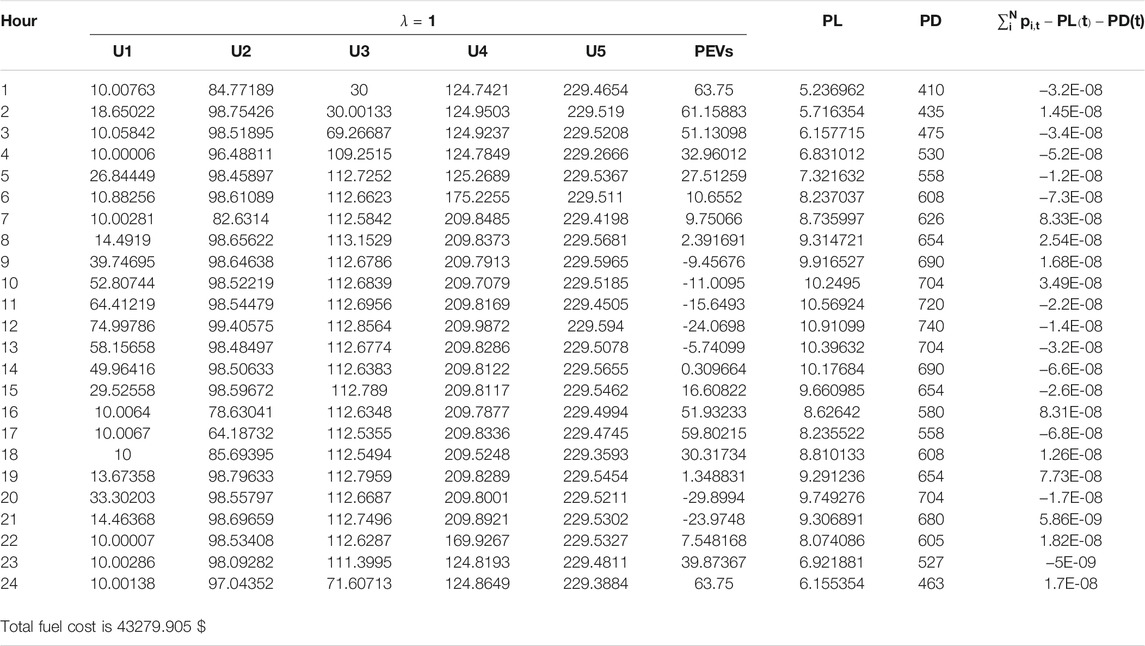
TABLE 13. The optimal solution information for Case V: the 5 units with orderly PEVs.
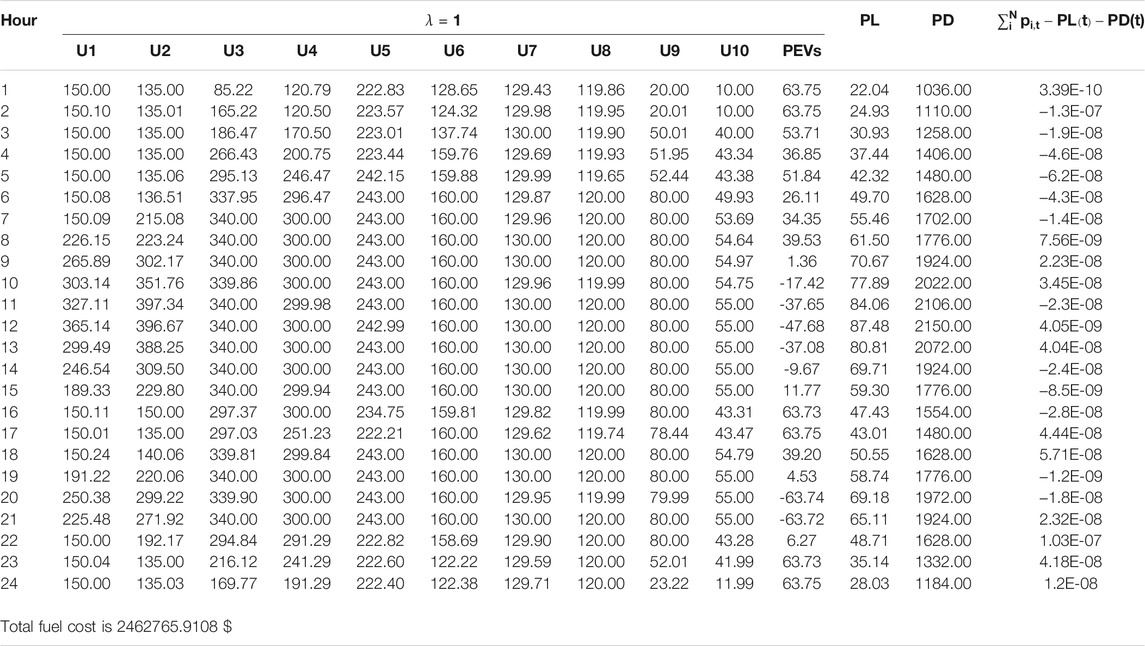
TABLE 14. The optimal solution information for Case VI: the 10 units with orderly PEVs.
From Eqs 15, 16, plug-in electric vehicles are effectively managed by the proposed strategy
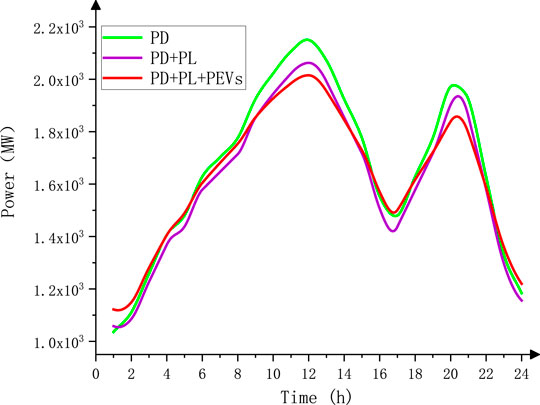
FIGURE 6. The demand considering the loss and PEVs for Case VI.
Conclusion
In view of the impact of plug-in electric vehicles on the power grid, and the complexity of dynamic economic dispatch considering the valve-point effect and transmission loss, this study integrates PEVs into DED and proposes a novel genetic algorithm: GADMFI, a simple and yet efficient constraint handling method aiming at power balance constraints. In three scenarios with two scales, only units, units with disorderly PEVs, and units with orderly PEVs, a horizontal and vertical comparison was carried out. The results show that GADMFI has an excellent performance in dealing with multi-modal, high-dimensional, and large-scale problems such as DED. At the same time, the proposed constraint handling method guarantees the feasibility of solutions and the design of target
Data Availability Statement
The author selected the following statement: the data analyzed in this study is subject to the following licenses/restrictions: commercial data. Requests to access these datasets should be directed toemwueWFuZ0BzaWF0LmFjLmNu.
Author Contributions
WY: writing-original draft preparation, data curation. ZP: writing-original draft preparation, investigation. WF: writing-original draft preparation. MM: supervision, visualization, writing-reviewing and Editing.
Funding
This work was financially supported by the National Natural Science Foundation of China (nos. 52077213, 620033326), the Scientific and Technological Project of Henan Province (nos. 202102110281, 202102110282), the Program for Innovative Research Team (in Science and Technology) in University of Henan Province (no. 20IRTSTHN016).
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abdelaziz, A. Y., Kamh, M. Z., Mekhamer, S. F., and Badr, M. A. L. (2008). A Hybrid HNN-QP Approach for Dynamic Economic Dispatch Problem. Electric Power Syst. Res. 78, 1784–1788. doi:10.1016/j.epsr.2008.03.011
Akopov, A. S., Beklaryan, L. A., Thakur, M., and Verma, B. D. (2019). Parallel Multi-Agent Real-Coded Genetic Algorithm for Large-Scale Black-Box Single-Objective Optimisation. Knowledge-Based Syst. 174, 103–122. doi:10.1016/j.knosys.2019.03.003
Ali, M. Z., Awad, N. H., Suganthan, P. N., Shatnawi, A. M., and Reynolds, R. G. (2018). An Improved Class of Real-Coded Genetic Algorithms for Numerical Optimization✰. Neurocomputing 275, 155–166. doi:10.1016/j.neucom.2017.05.054
Basu, M. (2011). Artificial Immune System for Dynamic Economic Dispatch. Int. J. Electr. Power Energ. Syst. 33, 131–136. doi:10.1016/j.ijepes.2010.06.019
Basu, M. (2008). Dynamic Economic Emission Dispatch Using Nondominated Sorting Genetic Algorithm-II. Int. J. Electr. Power Energ. Syst. 30, 140–149. doi:10.1016/j.ijepes.2007.06.009
Behera, S., Behera, S., and Barisal, A. K. (2019). “Ieee. Dynamic Economic Load Dispatch with Plug-In Electric Vehicles Using Social Spider Algorithm,” in Proceedings of the 2019 3rd International Conference on Computing Methodologies and Communication (New York: IEEE), 489–494.
Cai, X., Wang, H., Cui, Z., Cai, J., Xue, Y., and Wang, L. (2017). Bat Algorithm with triangle-flipping Strategy for Numerical Optimization. Int. J. Mach. Learn. Cyber. 9, 199–215. doi:10.1007/s13042-017-0739-8
Chakraborty, P., Roy, G. G., Panigrahi, B. K., Bansal, R. C., and Mohapatra, A. (2012). Dynamic Economic Dispatch Using harmony Search Algorithm with Modified Differential Mutation Operator. Electr. Eng. 94, 197–205. doi:10.1007/s00202-011-0230-6
Chuang, Y.-C., Chen, C.-T., and Hwang, C. (2015). A Real-Coded Genetic Algorithm with a Direction-Based Crossover Operator. Inf. Sci. 305, 320–348. doi:10.1016/j.ins.2015.01.026
Chuang, Y.-C., Chen, C.-T., and Hwang, C. (2016). A Simple and Efficient Real-Coded Genetic Algorithm for Constrained Optimization. Appl. Soft Comput. 38, 87–105. doi:10.1016/j.asoc.2015.09.036
Civicioglu, P. (2013). Backtracking Search Optimization Algorithm for Numerical Optimization Problems. Appl. Maths. Comput. 219, 8121–8144. doi:10.1016/j.amc.2013.02.017
D’Angelo, G., and Palmieri, F. G. G. A. (2021). A Modified Genetic Algorithm with Gradient-Based Local Search for Solving Constrained Optimization Problems. Inf. Sci. 547, 136–162. doi:10.1016/j.ins.2020.08.040
Deep, K., and Thakur, M. (2007). A New Crossover Operator for Real Coded Genetic Algorithms. Appl. Maths. Comput. 188, 895–911. doi:10.1016/j.amc.2006.10.047
Elaiw, A. M., Xia, X., and Shehata, A. M. (2013). Hybrid DE-SQP and Hybrid PSO-SQP Methods for Solving Dynamic Economic Emission Dispatch Problem with Valve-point Effects. Electric Power Syst. Res. 103, 192–200. doi:10.1016/j.epsr.2013.05.015
Elattar, E. E. (2015). A Hybrid Genetic Algorithm and Bacterial Foraging Approach for Dynamic Economic Dispatch Problem. Int. J. Electr. Power Energ. Syst. 69, 18–26. doi:10.1016/j.ijepes.2014.12.091
Fang, N., Zhou, J., Zhang, R., Liu, Y., and Zhang, Y. (2014). A Hybrid of Real Coded Genetic Algorithm and Artificial Fish Swarm Algorithm for Short-Term Optimal Hydrothermal Scheduling. Int. J. Electr. Power Energ. Syst. 62, 617–629. doi:10.1016/j.ijepes.2014.05.017
Hemamalini, S., and Simon, S. P. (2011). Dynamic Economic Dispatch Using Artificial Bee colony Algorithm for Units with Valve-point Effect. Euro. Trans. Electr. Power 21, 70–81. doi:10.1002/etep.413
Hemamalini, S., and Simon, S. P. (2011). Dynamic Economic Dispatch Using Artificial Immune System for Units with Valve-point Effect. Int. J. Electr. Power Energ. Syst. 33, 868–874. doi:10.1016/j.ijepes.2010.12.017
Iyer, V. H., Mahesh, S., Malpani, R., Sapre, M., and Kulkarni, A. J. (2019). Adaptive Range Genetic Algorithm: A Hybrid Optimization Approach and its Application in the Design and Economic Optimization of Shell-And-Tube Heat Exchanger. Eng. Appl. Artif. Intelligence 85, 444–461. doi:10.1016/j.engappai.2019.07.001
Kwak, N. S., and Lee, J. (2016). An Enhancement of Selection and Crossover Operations in Real-Coded Genetic Algorithm for Large-Dimensionality Optimization. J. Mech. Sci. Technol. 30, 237–247. doi:10.1007/s12206-015-1227-2
Li, Z., Zou, D., and Kong, Z. (2019). A harmony Search Variant and a Useful Constraint Handling Method for the Dynamic Economic Emission Dispatch Problems Considering Transmission Loss. Eng. Appl. Artif. Intelligence 84, 18–40. doi:10.1016/j.engappai.2019.05.005
Mei, P., Wu, L., Zhang, H., and Liu, Z. (2019). A Hybrid Multi-Objective Crisscross Optimization for Dynamic Economic/Emission Dispatch Considering Plug-In Electric Vehicles Penetration. Energies 12, 3847. doi:10.3390/en12203847
Mellal, M. A., and Williams, E. J. (2020). Cuckoo Optimization Algorithm with Penalty Function and Binary Approach for Combined Heat and Power Economic Dispatch Problem. Energ. Rep. 6, 2720–2723. doi:10.1016/j.egyr.2020.10.004
Mirjalili, S., and Lewis, A. (2016). The Whale Optimization Algorithm. Adv. Eng. Softw. 95, 51–67. doi:10.1016/j.advengsoft.2016.01.008
Mirjalili, S., Mirjalili, S. M., and Lewis, A. (2014). Grey Wolf Optimizer. Adv. Eng. Softw. 69, 46–61. doi:10.1016/j.advengsoft.2013.12.007
Mohammadi-ivatloo, B., Rabiee, A., and Ehsan, M. (2012). Time-varying Acceleration Coefficients IPSO for Solving Dynamic Economic Dispatch with Non-smooth Cost Function. Energ. Convers. Manage. 56, 175–183. doi:10.1016/j.enconman.2011.12.004
Nakane, T., Lu, X., and Zhang, C. (2020). A Search History-Driven Offspring Generation Method for the Real-Coded Genetic Algorithm. Comput. Intell. Neurosci. 2020, 8835852. doi:10.1155/2020/8835852
Naqvi, F. B., Yousaf Shad, M., and Khan, S. (2020). A New Logistic Distribution Based Crossover Operator for Real-Coded Genetic Algorithm. J. Stat. Comput. Simulation 91, 817–835. doi:10.1080/00949655.2020.1832093
Niu, Q., Zhang, H., Li, K., and Irwin, G. W. (2014). An Efficient harmony Search with New Pitch Adjustment for Dynamic Economic Dispatch. Energy 65, 25–43. doi:10.1016/j.energy.2013.10.085
Pan, S., Jian, J., and Yang, L. (2018). A Hybrid MILP and IPM Approach for Dynamic Economic Dispatch with Valve-point Effects. Int. J. Electr. Power Energ. Syst. 97, 290–298. doi:10.1016/j.ijepes.2017.11.004
Pandit, N., Tripathi, A., Tapaswi, S., and Pandit, M. (2012). An Improved Bacterial Foraging Algorithm for Combined Static/dynamic Environmental Economic Dispatch. Appl. Soft Comput. 12, 3500–3513. doi:10.1016/j.asoc.2012.06.011
Panigrahi, C. K., Chattopadhyay, P. K., Chakrabarti, R. N., and Basu, M. (2007). Simulated Annealing Technique for Dynamic Economic Dispatch. Electric Power Components Syst. 34, 577–586. doi:10.1080/15325000500360843
Picek, S., Jakobovic, D., and Golub, M. (2013). Ieee. On the Recombination Operator in the Real-Coded Genetic Algorithms. Ieee Congress Evol. Comput. 2013, 3103–3110.
Picek, S., Jakobovic, D., and Golub, M. (2013). On the Recombination Operator in the Real-Coded Genetic Algorithms. IEEE Congress Evol. Comput. 2013, 3103–3110. doi:10.1109/CEC.2013.6557948
Qian, S., Wu, H., and Xu, G. (2020). An Improved Particle Swarm Optimization with Clone Selection Principle for Dynamic Economic Emission Dispatch. Soft Comput. 24, 15249–15271. doi:10.1007/s00500-020-04861-4
Ravikumar Pandi, V., and Panigrahi, B. K. (2011). Dynamic Economic Load Dispatch Using Hybrid Swarm Intelligence Based harmony Search Algorithm. Expert Syst. Appl. 38, 8509–8514. doi:10.1016/j.eswa.2011.01.050
Saber, A. Y., and Venayagamoorthy, G. K. (2011). Plug-in Vehicles and Renewable Energy Sources for Cost and Emission Reductions. IEEE Trans. Ind. Electron. 58, 1229–1238. doi:10.1109/tie.2010.2047828
Sawyerr, B. A., Adewumi, A. O., and Ali, M. M. (2014). Real-coded Genetic Algorithm with Uniform Random Local Search. Appl. Maths. Comput. 228, 589–597. doi:10.1016/j.amc.2013.11.097
Sawyerr, B. A., Ali, M. M., and Adewumi, A. O. (2011). A Comparative Study of Some Real-Coded Genetic Algorithms for Unconstrained Global Optimization. Optimization Methods Softw. 26, 945–970. doi:10.1080/10556788.2010.491865
Shen, X., Zou, D., Duan, N., and Zhang, Q. (2019). An Efficient Fitness-Based Differential Evolution Algorithm and a Constraint Handling Technique for Dynamic Economic Emission Dispatch. Energy, 186. doi:10.1016/j.energy.2019.07.131
Sivasubramani, S., and Swarup, K. S. (2010). Hybrid SOA-SQP Algorithm for Dynamic Economic Dispatch with Valve-point Effects. Energy 35, 5031–5036. doi:10.1016/j.energy.2010.08.018
Tang, P.-H., and Tseng, M.-H. (2013). Adaptive Directed Mutation for Real-Coded Genetic Algorithms. Appl. Soft Comput. 13, 600–614. doi:10.1016/j.asoc.2012.08.035
Tehzeeb-ul-Hassan, H., Alquthami, T., Butt, S. E., Tahir, M. F., and Mehmood, K. (2020). Short-term Optimal Scheduling of Hydro-thermal Power Plants Using Artificial Bee colony Algorithm. Energ. Rep. 6, 984–992. doi:10.1016/j.egyr.2020.04.003
Thakur, M., Meghwani, S. S., and Jalota, H. (2014). A Modified Real Coded Genetic Algorithm for Constrained Optimization. Appl. Maths. Comput. 235, 292–317. doi:10.1016/j.amc.2014.02.093
Wang, J., Zhang, M., Ersoy, O. K., Sun, K., and Bi, Y. (2019). An Improved Real-Coded Genetic Algorithm Using the Heuristical Normal Distribution and Direction-Based Crossover. Comput. Intell. Neurosci. 2019, 4243853. doi:10.1155/2019/4243853
Wang, J., Cheng, Z., Ersoy, O. K., Zhang, P., Dai, W., and Dong, Z. (2018). Improvement Analysis and Application of Real-Coded Genetic Algorithm for Solving Constrained Optimization Problems. Math. Probl. Eng. 2018, 1–16. doi:10.1155/2018/5760841
Wang, Y., Zhou, J., Lu, Y., Qin, H., and Wang, Y. (2011). Chaotic Self-Adaptive Particle Swarm Optimization Algorithm for Dynamic Economic Dispatch Problem with Valve-point Effects. Expert Syst. Appl. doi:10.1016/j.eswa.2011.04.236
Wang, Y., Yang, Z., Mourshed, M., Guo, Y., Niu, Q., and Zhu, X. (2019). Demand Side Management of Plug-In Electric Vehicles and Coordinated Unit Commitment: A Novel Parallel Competitive Swarm Optimization Method. Energ. Convers. Manage. 196, 935–949. doi:10.1016/j.enconman.2019.06.012
Wang, Z. Y., Li, Y. R., and Tang, Y. Q. (2019). “Ieee. An Efficient Hybrid DE-WOA Algorithm for Numerical Function Optimization,” in Ieee 28th International Symposium on Industrial Electronics (New York: Ieee; 2019), 2629–2634.
Yang, Z., Li, K., and Foley, A. (2015). Computational Scheduling Methods for Integrating Plug-In Electric Vehicles with Power Systems: A Review. Renew. Sustain. Energ. Rev. 51, 396–416. doi:10.1016/j.rser.2015.06.007
Yang, Z., Li, K., Niu, Q., and Xue, Y. (2017). A Comprehensive Study of Economic Unit Commitment of Power Systems Integrating Various Renewable Generations and Plug-In Electric Vehicles. Energ. Convers. Manage. 132, 460–481. doi:10.1016/j.enconman.2016.11.050
Yang, Z., Li, K., Niu, Q., and Xue, Y. (2017). A Novel Parallel-Series Hybrid Meta-Heuristic Method for Solving a Hybrid Unit Commitment Problem. Knowledge-Based Syst. 134, 13–30. doi:10.1016/j.knosys.2017.07.013
Yang, Z., Li, K., Niu, Q., Xue, Y., and Foley, A. (2014). A Self-Learning TLBO Based Dynamic Economic/environmental Dispatch Considering Multiple Plug-In Electric Vehicle Loads. J. Mod. Power Syst. Clean. Energ. 2, 298–307. doi:10.1007/s40565-014-0087-6
Yuan, X., Wang, L., Zhang, Y., and Yuan, Y. (2009). A Hybrid Differential Evolution Method for Dynamic Economic Dispatch with Valve-point Effects. Expert Syst. Appl. 36, 4042–4048. doi:10.1016/j.eswa.2008.03.006
Keywords: dimension-by-dimension mutation, horizontal vertical local search, collaborative optimization, constraints handling method, dynamic economic dispatch, plug-in electric vehicles, real-code genetic algorithm
Citation: Yang W, Peng Z, Feng W and Menhas MI (2021) A Novel Real-Coded Genetic Algorithm for Dynamic Economic Dispatch Integrating Plug-In Electric Vehicles. Front. Energy Res. 9:706782. doi: 10.3389/fenrg.2021.706782
Received: 10 May 2021; Accepted: 25 August 2021;
Published: 30 September 2021.
Edited by:
Kailong Liu, University of Warwick, United KingdomReviewed by:
Junainah Sardi, Technical University of Malaysia Malacca, MalaysiaJiale Xie, North China Electric Power University, China
Copyright © 2021 Yang, Peng, Feng and Menhas. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Wei Feng, d2VpLmZlbmdAc2lhdC5hYy5jbg==