 Tomasz Tarasiuk
Tomasz Tarasiuk Piotr Jankowski1
Piotr Jankowski1 Viknash Shagar
Viknash Shagar- 1Department of Marine Electrical Power Engineering, Gdynia Maritime University, Gdynia, Poland
- 2MEWO. S.A., Straszyn, Poland
The chief aim of the proposed paper is to compare the behavior of supply voltage registered onboard three vessels equipped with high power converters during normal operation. The vessels considered are a chemical tanker with shaft generator working via power converter, a research-training ship with bow thruster, and a research vessel with dynamic positioning (DP) and electrical propulsion. In the case of the two latter ships, power electronic loads are present, which include a bow thruster adjustable speed drive equipped with the six pulse uncontrolled rectifier and the adjustable speed drive with an active front end (AFE) for propulsion system. For each ship, instantaneous frequency is determined and subsequently fluctuations of fundamental components and chosen harmonics are calculated using zoom-DFT. The characteristics of these irregular fluctuations are compared and commented on. Next, phase portraits and Poincare map of the registered voltages are calculated and compared. Moreover, the impact of ship rolling and pitching on the oscillatory behavior is assessed for the DP ship. The final conclusions identify reasons for oscillatory behavior in electric power systems of marine vessels containing high power converters on the source side and load side. The feasibility of using voltage trajectories as well as Poincare maps for oscillatory behavior detection is assessed.
Introduction
The maritime microgrids represent a class of microgrids which usually operate in an islanded mode. Due to limited generating capacity, generators’ prime movers characteristics, and fast changing loads, the characteristic feature of such microgrids is fluctuation of instantaneous frequency and voltage (Tarasiuk, 2016). The variability of these key electrical parameters is a problem from the advent of AC maritime microgrids. The effects of such phenomena are various but arguably the most affected are electrical motors and common electrical energy receivers onboard. The voltage and frequency fluctuations can lead to undesirable electrical motors shaft vibration and decrease in their energy efficiency and add thermal stress to insulation, thus creating hazardous operating conditions for electrical motors onboard (Gnaciński et al., 2020). Frequency fluctuations can also lead to undesirable resonances and cause crucial equipment such as measuring instruments to malfunction, while the effects of poor voltage profile include problems such as lamp flicker. A worst case scenario of partial or total blackout of the power network endangering the safety of man and machine onboard can also result from these power quality issues (Xu et al., 2006; Prousalidis et al., 2007; Prousalidis et al., 2009; Jayasinghe et al., 2018; Liu et al., 2019). The problem of instantaneous frequency modulation is recognized by some ship classification societies such as Lloyd Register of shipping which stipulates limits on “a maximum rate of change of frequency not exceeding ±1.5 Hz per second during cyclic frequency fluctuations” (Lloyd’s Register, 2019). The permissible limits of these variations are explained in other related standards. According to the IEEE Standard 45.1™-2017 IEEE Recommended Practice for Electrical Installations on Shipboard-Design, voltage, and frequency modulation refer to the periodic variation in voltage or frequency during normal operation that might be caused by regular and random repeated loading conditions. The periodicity or voltage modulation is considered to be longer than 1 Hz and less than 10 s. For purposes of definition, the periodicity of frequency modulation should be considered as not exceeding 10 s (IEEE Standard 45.1, 2017). The proposed measures are the ratios of difference between the maximum and minimum instantaneous values and twice the nominal voltage or twice the nominal frequency, respectively, expressed in percentage terms. The limits are 0.5% for frequency and 5% for voltage.
Well documented causes of such behavior include pulsating torque of generators’ prime movers and/or fluctuating load, which combined with commonly used droop control method for load sharing, possibly leads to severe short and long-term frequency fluctuations. However, little is known about the oscillatory phenomena in shipboard systems when the typical fluctuations meet with wide use of power electronics. It must be noted that onboard modern ships, ever-increasing number, and power of adjustable speed drives devices are being introduced due to the pressing need for improvement of fuel economy on shipboard and limiting greenhouses emission. These range from thruster drives for ship propulsion and/or steering to power converters for frequency stabilization in ships with shaft generators, i.e., generators driven by main engines as their prime movers (Skjong et al., 2016). This resulted in the pressing problem of waveform distortions in the considered systems. To make matters worse, the existing instantaneous frequency modulation can lead to unpredictable system behavior, such as the occurrence of resonances, modulation of harmonics, etc. However, the final results of combination of these factors are hard to predict since this depends on the system architecture, actual load, characteristics of automatic voltage regulators (AVR), prime movers, governors, and control of power electronics. The topic on behavior of maritime microgrids, where heavy usage of power electronic devices meets with instantaneous voltage and frequency variations, has not been sufficiently studied. Therefore, the presented case study aims to fill this gap and provide insight into the considered problem giving future researchers basic clues and knowledge about such a system’s behavior. Authors of the paper have compared the supply voltage behavior onboard three vessels equipped with high power converters. The authors’ original database of real cases registered onboard several vessels was used. Three vessels have been carefully selected for this paper purpose. Each ship represents a separate case of ship microgrid architecture with one common feature, namely, the presence of power converters. The aim was to enable comparison of the impact of the system’s architectures on oscillatory behavior of supply voltage in considered systems. One of the investigated ships is a chemical tanker with shaft generator driven by the main diesel engine (this means that frequency at generator’s output varies), which is connected with busbars of main switchboard via power converter, in order to stabilize the frequency in the electric power system. The chemical tanker is an example of a marine vessel with non-sinusoidal supply. The second and third ships are equipped with high power variable speed drives. The research-training ship contains a bow thruster supplied by a power converter, whereas the ship with dynamic positioning (DP) is a vessel with electrical propulsion.
The paper is organized as follows. Systems under Investigation describes the systems that are under investigation. Modulation of Instantaneous Frequency, Voltage Fundamental Components, and Chosen Harmonics presents the modulation of fundamental voltage and the instantaneous frequency in addition to the modulation of harmonics of fifth, seventh, and eleventh orders. Phase Portraits and Poincare Maps contains the results of determination of voltage phase portraits and corresponding Poincare maps for each ship.
The paper focuses on the problem of possible impact of common instantaneous voltage and frequency modulation, fluctuation of harmonics, and the oscillatory behavior of such a system. The authors assume that this will depend on the systems’ architectures, load characteristics, especially power electronics devices, and sea conditions. For the latter, the case of DP ship comprises two sub-cases. The investigations have been carried out in calm sea and rough sea conditions. The aim of the latter investigation is to assess the impact of irregular waves on oscillatory behavior of key electrical parameters in an exemplary marine vessel. This is a result of interaction between irregular waves, propeller, power converter, governors, and automatic voltage regulators. Additionally, irregular characteristics of the DP ship rolling and pitching during the research are presented. The paper should be considered mainly as the case study on the considered topic, which aims to provide clues for future research.
Systems Under Investigation
The investigated systems represent three classes of real maritime microgrids. The microgrid of the first ship is equipped with electrical propulsion and dynamic positioning (DP) system. This DP vessel has a twin hull and its electrical propulsion consists of two variable speed drives with a rated power of 300 kW each. Each of the drives contains an active front end (AFE). Its system rated voltage is equal to 400 V and nominal frequency is 50 Hz. The DP vessel together with research-training vessel constitute two types of vessels with a large amount of non-linear loads (considering the rated powers). The simplified scheme of the vessel’s system is presented in Figure 1. During the study, two generators were operating in parallel. The generator rated powers were 425 and 200 kVA. The vessel is equipped with two 72 kW bow thrusters for dynamic positioning, but the thrusters were not in operation for the duration of this study.

FIGURE 1. Schematic of the electric power system of DP ship.
The second ship was the chemical tanker with a shaft generator. Since the rotational speed of such a generator is variable, the power converter (constructed with SCR thyristors) is used for frequency stabilization. The rated power of the shaft generator is 1,187 kVA, the system rated voltage equals to 440 V, and rated frequency equals 60 Hz. The chemical tanker is an example of a marine vessel with non-sinusoidal supply, since the output voltage of the power converter is distorted. Additionally, it is equipped with a synchronous compensator SC. The simplified scheme of the vessel’s system is presented in Figure 2.
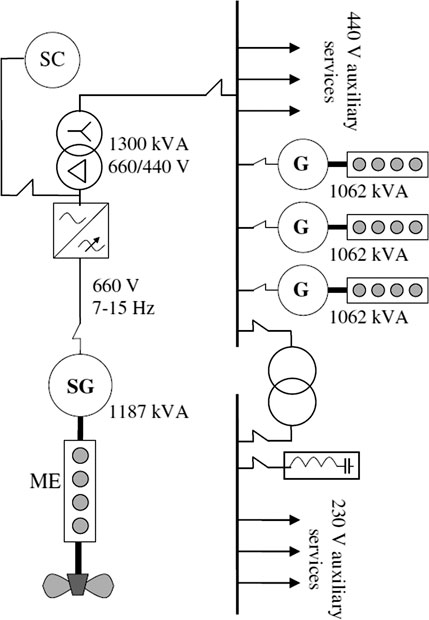
FIGURE 2. Schematic of the electric power system of a chemical tanker.
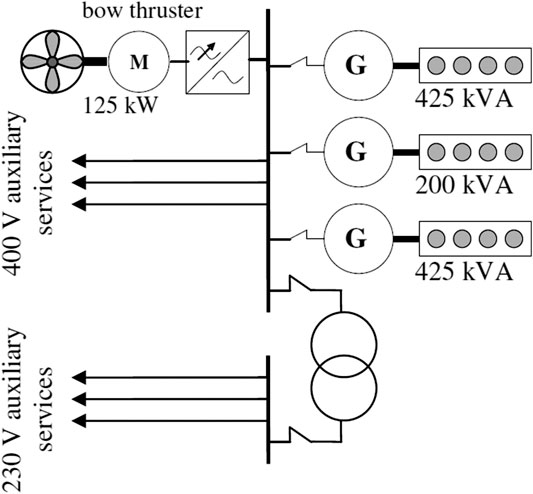
FIGURE 3. Schematic of the electric power system of research-training ship.
The research-training ship contains a bow thruster supplied by the power converter with a six pulse rectifier. During research onboard the research-training ship, the bow thruster load was approximately 109 kW (nominal load 125 kW) and it was supplied by one diesel-driven generator with a rated power of 376 kVA and a load of 280 kW (bow thruster and other loads like pumps, fans, heathers, etc.). The system rated voltage is equal to 400 V and nominal frequency is 50 Hz. The simplified scheme of the research-training ship system is presented in Figure 3.
Modulation of Instantaneous Frequency, Voltage Fundamental Components, and Chosen Harmonics
Research Methodology
The purpose of this research is to determine oscillatory behavior of supply voltage for each system and determining modulation of its main parameters like frequency, fundamental component, and harmonics of the fifth, seventh, and eleventh orders. The systems were selected in such a way that they represent three separate classes of maritime microgrids containing significant power electronics. For the research, the following model of voltage harmonic signal is adopted:
and argument of cosine function can be expressed by
where instantaneous magnitude ah(t) and phase θh(t) are determined as follows (Boashash, 1992):
where gh(t) is the modulating signal. For maritime microgrids with diesel engines as generators’ prime movers, the signal can be described as a combination of sine functions with frequencies being an integer fraction of the actual fundamental frequency. However, the gh(t) function becomes more complex in the case of ships with electrical propulsion, particularly under rough sea conditions, since irregular waves impact gh(t) as well. Irregular waves can be modeled as a combination of the regular ones. Therefore, for all cases, gh(t) can be presented as combination of sine functions and described as follows:
The value of n in Eq. 5 goes to infinity. However, for real cases, it can be limited to a few or few dozens of components depending on the system architecture, load, and sea conditions. Examples will be presented in Research Onboard of DP Ship for the DP ship.
Finally, the instantaneous frequency can be defined as (Boashash, 1992)
The adopted definition of instantaneous frequency is in accordance with the frequency definition as in IEEE Standard for Synchrophasor Measurements for Power Systems (IEEE Standard C37.118.1, 2011).
There are a few solutions for determining instantaneous frequency of a power signal. Among the most popular are the interpolated DFT, sine fitting, Hilbert transform (Mostarac et al., 2010), and zoom-DFT. In the case of zoom-DFT, the chirp z-transform is often used for decreasing the time of computation (Huang et al., 2007; Mostarac et al., 2010). Moreover, the comparative study on the application of the zoom-DFT and the Hilbert–Huang transform (HHT) for instantaneous frequency identification in maritime microgrids revealed that the obtained results were fully comparable and the conclusions resulting from both studies were the same (Tarasiuk et al., 2020).
For the purpose of this paper, the zoom-DFT technique was chosen (Yip, 1976) due to its simplicity and popularity of Fourier transforms as well as taking into account results of experimental comparison with the Hilbert–Huang transform. For the calculation, the starting point is assumed to be below the expected value of instantaneous frequency (fundamental or harmonic) and the ending point above this frequency. Finally, the calculations were performed using the following formula:
where v are the voltage samples, N is the number of samples, h is the relative order of the lowest frequency in assumed frequency range (starting point), K are the coefficients of Kaiser window, Δh is the relative frequency resolution, and M is the relative ending point.
The main advantages of the technique are simplicity and the capability to determine concurrently both the instantaneous frequency and instantaneous magnitude of harmonic signal. The magnitude of the bin with the highest value from the range between starting and ending point represents the instantaneous magnitude and its frequency can be considered as the instantaneous frequency. Unfortunately, the technique has some disadvantages. The frequency range has to be selected prior to computation, similar to the width of measurement window (number of samples N). The latter is a trade-off between the accuracy of determining the depth of modulation for higher modulating frequencies and limitation of the impact of the commonly known problem of spectral leakage of DFT. The spectrum leakage can significantly impact even fundamental component instantaneous parameters identification due to the leakage of the negative frequency fundamental component. Therefore, the application of proper window function is crucial. Next, the increase in frequency resolution significantly increases the computational complexity; however, in this case, faster algorithm based on chirp z-transform can be used.
Finally, for each frequency range containing the fundamental component or chosen harmonic, respectively, a number of calculations were carried out with an assumed frequency resolution of 0.001 Hz. For minimizing the impact of spectrum leakage, the Kaiser window was used. The window was parameterized by β = 7.65, which limits the spectrum leakage of the negative frequency fundamental component as much as possible. The sliding window (3.33 ms steps) equal to actual three fundamental cycles was used. It was dynamically set for actual instantaneous frequency, determined from the previous step of calculation. These values were chosen after simulation trials using a number of testing signals, determined by using the signal model described by Eq. 1. The testing signals modeled voltages encountered through experiments onboard vessels and registered by authors under various conditions over the last twenty years. This confirmed that zoom-DFT is sufficient for such analyses, at least in maritime microgrids. Furthermore, a low-pass filter with a cut-off frequency of 25 Hz was used for smoothing the obtained results. The method was implemented in an original authors software developed in the LabVIEW environment, with data stream from a file containing previously registered samples.
Research Onboard of DP Ship
The DP ship is a vessel with an integrated powers system. Therefore, the majority of the propulsion power and ship service power are supplied from a common electrical power generating plant. As a result, the electricity characteristics in its system hugely depend on actual sea conditions (Tarasiuk, 2016). In short, the propellers’ torques are modulated depending on the waves, wind, vessel’s relative course, speed, and hull characteristics, resulting in variable load of the electric power plant. The impact on oscillations of voltage parameters would depend on a number of factors. The most important are the characteristic of governors and AVRs as well as topology and control of power converters. AFE PWM was installed onboard the DP ship. They are supplied by voltage with variable frequency and variable levels of distortion. Moreover, during sea going of this DP ship, two diesel-driven generators worked in parallel and two AFE drives were used for the ship propulsion (two propellers were used). The mean value of voltage THD factor in the range up to 50th harmonic was similar for both cases, rough and calm sea, a little below 2%. The oscillations in the system can arise from interactions between generators’ governors, AVRs, and AFE drives controllers (Zadeh et al., 2016; Zadeh et al., 2017) as well as impact of environmental conditions.
In order to evaluate the impact of irregular waves for oscillatory behavior of the afore-mentioned ship electrical power system, research is carried out for two cases: calm sea (impact of waves can be neglected) and rough sea. Authors have registered ship pitching and rolling concurrently with electrical parameters. The ship pitching and rolling profiles considered in this study are shown in Figure 4.
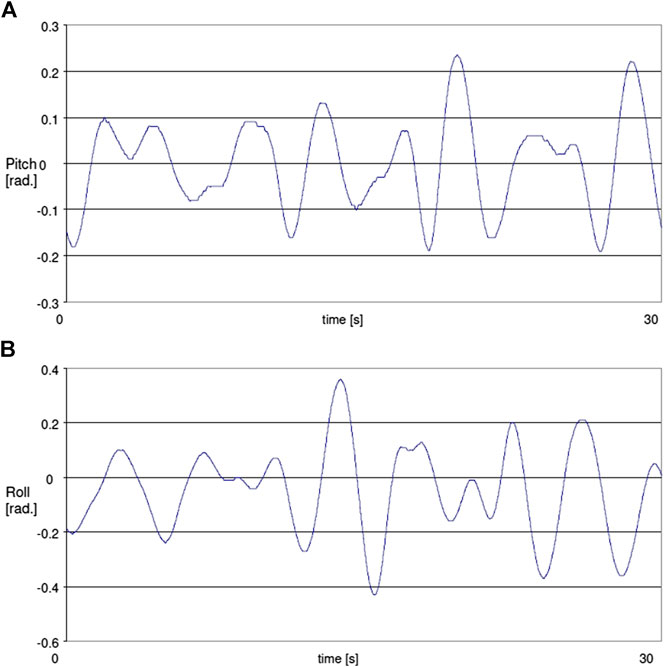
FIGURE 4. DP ship pitching (A) and rolling (B) under rough sea conditions.
The rough analysis of ship rolling and pitching leads to the conclusion that irregular torque modulation was different for each propeller due to their physical distance and related different momentary immersion and water flow. So, the momentary loads for each drive also differed. This fact introduces additional variable to the investigation of oscillatory behavior of maritime systems.
Results for Calm Sea
The fluctuations of instantaneous frequency and fundamental component of voltage are shown in Figure 5.The fluctuation of harmonics of the fifth, seventh and eleventh orders are shown in Figure 6.
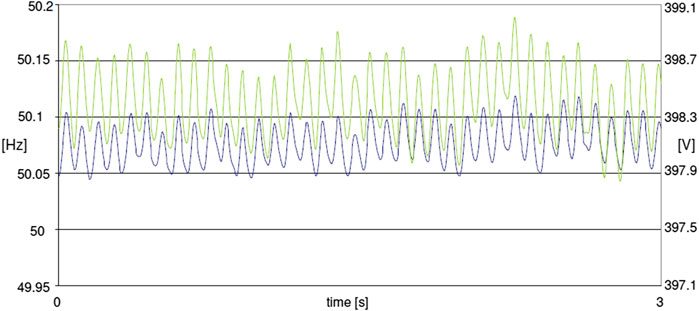
FIGURE 5. Fluctuations of instantaneous frequency (blue line) and fundamental voltage component (green line) in the system of DP ship under calm sea condition.
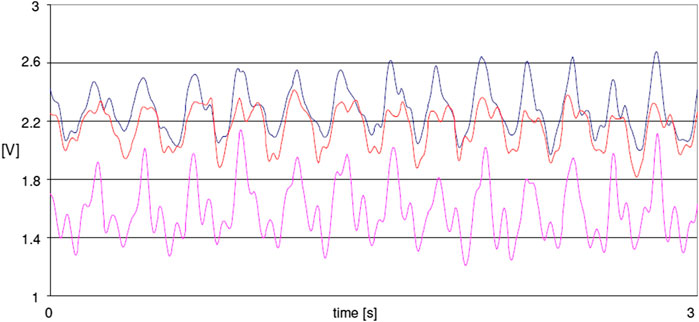
FIGURE 6. Fluctuations of fifth harmonic voltage (blue line), seventh harmonic voltage (purple line), and eleventh harmonic voltage (red line) in the system of DP ship under calm sea condition.
Careful analysis of the results lead to the conclusion that fundamental voltage is modulated with a frequency of 12.519 Hz (determined by multi-sine fitting algorithm (Carnì and Fedele, 2009)). The reason for the effect is the pulsating torque of the generators’ prime movers and resulting fluctuation of rotational speed. The most often used prime movers for driving generators on shipboard are four stroke medium speed diesel engines. The output of such engines is not constant but pulsating, with one positive peak and one negative peak (of a smaller magnitude) of torque for every piston per 720° crankshaft rotation. In order to reduce this effect, fly wheels are used. Nevertheless, it has detrimental effects on frequency and voltage in the maritime systems leading to their modulation. The frequency of this modulation depends on actual frequency as well as generators and its prime mover characteristics. For the considered case, the rated rotational speed of diesel engines used as prime movers has been 1500 RPM (or 25 rev per second) and the generator with two pole pairs. As a result, the dominant modulation frequency has equal to actual power frequency divided by four (half of the angular frequency of the shaft). For the considered example, the mean frequency was 50.075 Hz and the modulation frequency was 50.075Hz/4 = 12.519 Hz. The maximum level (peak-to-peak) of instantaneous frequency modulation is approximately 0.065 Hz and the level of fundamental voltage modulation is 1.04 V. In both cases, it is safely below the limits recommended in IEEE Standard (IEEE Standard 45.1, 2017).
However, modulation frequency of the harmonics differs and this is unrelated to prime movers torque pulsation. Harmonics are modulated with a frequency of approximately 4.21 Hz. The only exception is the seventh harmonic, for which two modulating frequencies of 4.21 and 12.62 Hz exist. The latter is more or less related to fundamental voltage modulation. So, this can be concluded that in the case of AFE drives, the modulation of higher harmonic contents is not directly related to fluctuation of rotational speed. Nevertheless, some oscillatory behaviors of these contents should be expected due to fluctuation of supply voltage parameters but with different frequency. The depths of modulation are approximately 0.68 V for the fifth harmonic, 0.92 V for the seventh harmonic, and 0.54 V for the eleventh harmonic.
Results for Rough Sea
The very same research on fundamental voltage, frequency, and harmonics fluctuations was repeated for rough sea, characterized by the vessel rolling and pitching as presented in Figure 4. Respective results for the fluctuations of instantaneous frequency and fundamental component of voltage are shown in Figure 7 and fluctuations of harmonics of fifth, seventh, and eleventh orders are shown in Figure 8.
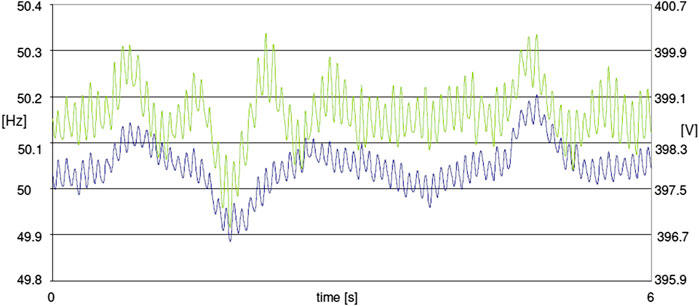
FIGURE 7. Fluctuations of instantaneous frequency (blue line) and fundamental voltage component (green line) in the system of DP ship under rough sea condition.
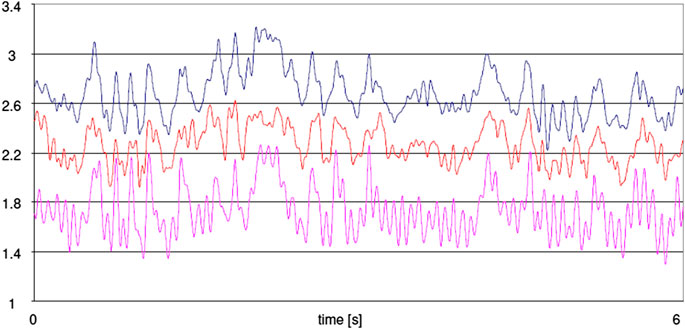
FIGURE 8. Fluctuations of voltage fifth harmonic (blue line), seventh harmonic (purple line), and eleventh harmonic (red line) in the system of DP ship under rough sea condition.
It is clearly visible that the impact of waves cannot be neglected and the modulation of all components becomes more irregular due to irregular pitching and rolling of the vessel. Additional modulating frequencies appear in the range of approximately 0.2/1 Hz, which dominate, but the component related to fluctuation of rotational speed of the prime mover is still present adding to the severity of fluctuations due to waves. As a result, the depth of voltage and frequency modulations increase as well. For the presented example, the difference between maximum and minimum instantaneous frequency reaches 0.32 Hz or 0.32% of twice the system rated frequency. This is still below the recommended limit value of 0.5% (IEEE Standard 45.1, 2017). During the research, the sea state was five to six in the Beaufort scale, indicating moderate waves, but more stormy conditions (higher waves) can possibly lead to excessive modulation, increasing the risks for ship electrical equipment and other undesirable phenomena related to instantaneous frequency fluctuations. In the authors’ opinion, the effect is largely neglected till now. Most of the ship classification societies do not deal with this problem, except Lloyd. However, the authors are convinced that this has to be considered, when modeling the ship systems during design stage, at least when making the choice of propeller drives and generating sets as well as their control settings. Similarly, the depth of fundamental voltage modulation increases from 1.04 to 3.34 V, fifth harmonic from 0.68 to 0.99 V, seventh harmonic form 0.92 to 0.95 V, and eleventh harmonic from 0.54 to 0.70 V. It is visible that the impact of ship pitching and rolling concerns only the fundamental voltage and frequency in practice. This impact can be neglected in the case of harmonics.
Finally, regarding the instantaneous frequency modulating signal gh(t) described by Eq. 5, it requires n value equal to 14 in order to keep the mean difference between the results of the model used to determine instantaneous frequency and the results of measurement below 5 mHz for the case presented in Figure 7 (rough sea). Then, the value for calm sea (Figure 5) assumes value 5 for the same difference of 5 mHz. In the case of rough sea, the dominant modulating frequencies are 0.5, 12.5, and 0.16 Hz and in the case of calm sea, the dominant modulating frequencies are 12.5, 0.36, and 0.17 Hz. The modulating signal gh(t) parameters were obtained using a two-stage approach: preliminary DFT analysis and subsequent multi-sine fitting.
Research Onboard of Chemical Tanker
It was mentioned above that the chemical tanker, during shaft generator operation, represents a maritime microgrid with non-sinusoidal supply. For the ship, the modulation of instantaneous voltage and frequency as in the case of DP vessel is calculated and presented in Figure 9, and Figure10 shows the waveform of the harmonics. During research onboard of chemical tanker, the mean value of voltage THD in the range up to 50th harmonic was 11.5%.
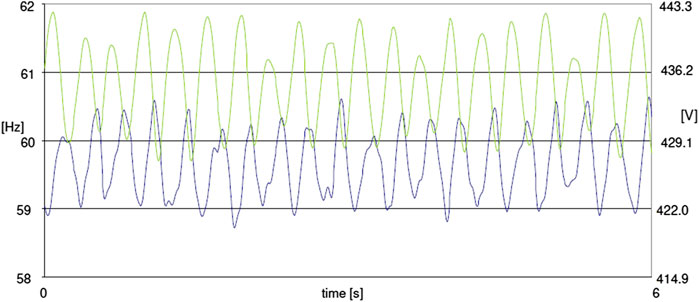
FIGURE 9. Fluctuations of instantaneous frequency (blue line) and fundamental voltage component (green line) in the system of chemical tanker.
FIGURE 10. Fluctuations of voltage fifth harmonic (blue line), seventh harmonic (purple line), and eleventh harmonic (red line) in the system of chemical tanker.
Analysis of the results obtained for chemical tanker reveals that there is one dominant frequency of all parameters modulation equal to 6.67 Hz. Moreover, the rotational speed fluctuation related to prime mover (main engine) operation is absent due to the existence of DC link in the power converter connecting shaft generator and main busbars. The level of modulation is significant, reaching 15 V for fundamental component and 1.5 Hz for instantaneous frequency. For the latter, it is 1.25% of twice of nominal system frequency and significantly above the recommended limit value (IEEE Standard 45.1, 2017). Since the majority of loads had linear characteristic and did not vary, such a behavior is to be associated with power converter control under the condition of significantly varying frequency at the shaft generator terminal. Moreover, the level of all parameters oscillation was the highest of all analyzed ships.
Research Onboard of Research-Training Ship
The case study for the research-training ship is similar to the DP ship because both the systems have high power electronics loads and diesel-driven generators. However, two telling exceptions for the loads exist. Namely, the bow thruster load onboard the research-training ship is hardly affected by waves (according to the authors research, the impact can be neglected) and a six pulse rectifier was present instead of the AFE. This can be considered to be a highly non-linear load. By definition, the impedance of such non-linear loads would be varying in a more complex and dynamic manner. The changing impedance of non-linear loads such as variable frequency drives and power electronic devices results in highly non-linear currents circulating in the electrical system. Therefore, the harmonic content of such systems is expected to be significant (Bhanoo, 1998; Tomy and Menon, 2016). The mean value of voltage THD for the considered ship was equal to 6.7% in the range to harmonic of 50th order, despite the fact that most loads were linear.
For the research-training ship, the oscillatory behavior is similar to the case of DP ship. The modulating component related to prime mover torque pulsation is present only for instantaneous frequency and fundamental voltage. As the characteristics of prime movers and generators are similar for both ships, the frequency of modulation was equal to 1/4 of actual fundamental frequency. However, contrary to other analyzed ships, the level of harmonics content modulation is hardly visible, despite the fact that the fifth harmonic content reaches 5%. This can be explained by a lack of active control of power electronics connected directly to busbars of the main switchboard and the almost complete lack of impact of the sea waves.
Phase Portraits and Poincare Maps
The methods used in chaos analysis have been extensively applied for power system analysis lately (Abarbanel et al., 1990; Tan et al., 1993; Garcia and Acha, 2004; Jankowski, 2015; Keyvani-Boroujeni et al., 2020). Authors decided to present the application of some of the related tools like phase portraits and Poincare maps for analysis of oscillatory behavior of supply voltage parameters in maritime microgrids. The reason is the relative complexity of the methods based on zoom-DFT. Unlike these methods, the phase portraits and Poincare maps can be easily computed and used for fast detection of oscillatory behavior. To the authors’ best knowledge, this is one of the pioneering comparative studies on application of the methods for analysis of real signals registered onboard of ships with different power system architectures.
In order to determine the phase portraits, the derivative of the voltage is to be calculated. The following four points and fast computation formula have been used (DeLevie, 2009):
where V are the voltage samples, k is the sample order (number), and h is the scaling factor.
For normalization, the results were scaled in accordance with rated values of voltage and frequency for each of the considered systems. This means that for the rated voltage and frequency, the phase portrait will be represented by a circle with radius equal to one. Finally, the results should be interpreted as per unit values of respective rated values. This enables comparison of different systems behavior. Next, the Poincare map has also been determined using the same scaling factors. Poincare map is defined as a stroboscopic image determined on the basis of the phase trajectory with a constant period T (Kantz and Schreiber, 2004; Schuster and Just, 2005; Jankowski et al., 2018). However, in the case of maritime microgrids, the power frequency fluctuates. This means that, after a few cycles, the Poincare map determined for constant time span would mimic phase portrait. Therefore, the authors determined the Poincare map for constant phase of the fundamental component (Jankowski et al., 2018). The research consisted of determining the Poincare maps for twenty four phases (15° step) of each voltage value considered. For every map, the coordinates of the mean point were calculated for each phase and the square roots of mean square distance from every point to mean point were determined by Eq. 9:
where dVPn is the coordinate of each point on Poincare map for voltage differential axis, VPn is the coordinate of each point on Poincare map for voltage cut off axis, mean_dVP and mean_VP are the respective coordinates of mean point, and p is the number of points for considered phase representing 1 min.
The SQR(D) factor was introduced in order to compare Poincare maps for each ship. This can be considered as a new indicator for rough assessment of the analyzed phenomena. Due to observed dependence of the calculation results of the chosen phase for each ship, its mean value for twenty four phases were determined. Finally, dimensionless values of such a SQR(D) calculation are 0.29 for DP ship under calm sea condition, 0.22 for DP ship under rough sea condition, 0.45 for chemical tanker, and 0.08 for research-training ship. In order to exemplify the results, the graphical example of such analysis was presented for the phase 2π/3 (120°) for each case. This means that for rated conditions, each Poincare map would be represented by a single point with coordinates (dv(t) = −0.5, v(t) = 0.866). In order to determine the phase of the fundamental component, the actual duration of one cycle was determined using the zero-crossing method after low phase filtration. The results of the calculation of phase portrait and Poincare map for chemical tanker and the research-training ship are displayed in Figures 11 and 12, respectively. The results for DP ship are presented in Figure 13 for calm sea and Figure 14 for rough sea conditions. It must be noted that, for each case, the signals were band limited to 0/4 kHz by low-pass filtration.
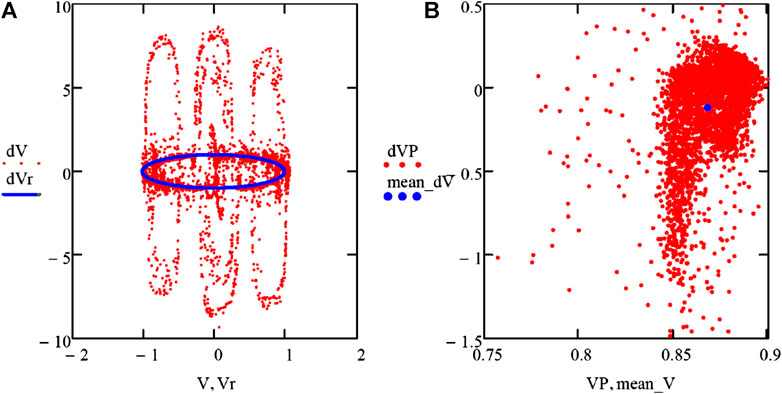
FIGURE 11. Scaled phase portrait (A) and Poincare map (B) calculated for phase 2π/3 and chemical tanker; blue circle represents reference phase portrait for rated voltage, coordinates of the mean point (blue): mean_dV = −0.118, mean_V = 0.868, and SQR(D) = 0.337.
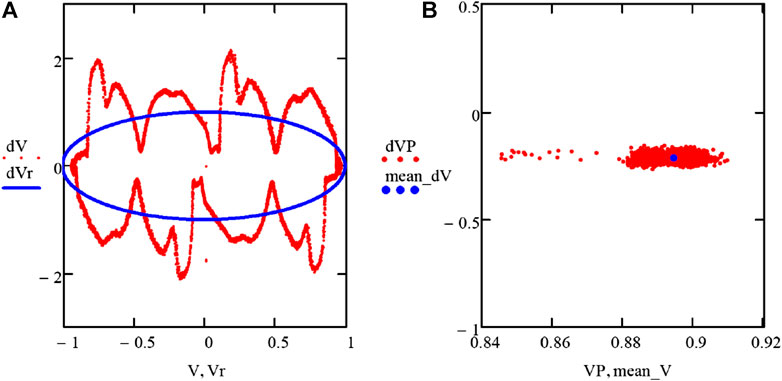
FIGURE 12. Scaled phase portrait (A) and Poincare map (B) calculated for phase 2π/3 and research-training ship; blue circle represents reference phase portrait for rated voltage, coordinates of the mean point (blue): mean_dV = −0.213, mean_V = 0.894, and SQR(D) = 0.018.
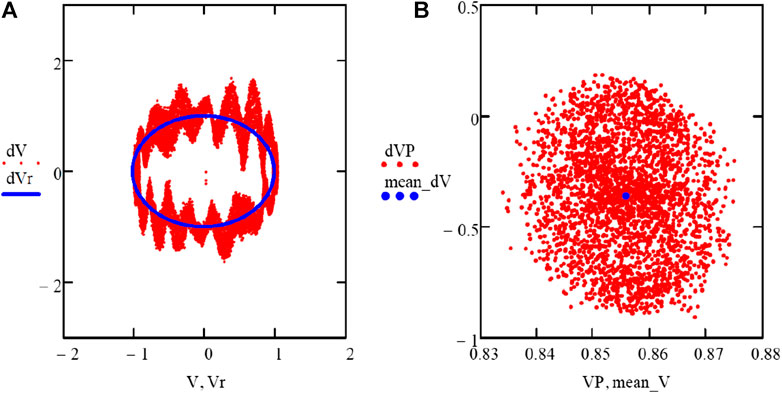
FIGURE 13. Scaled phase portrait (A) and Poincare map (B) calculated for phase 2π/3 and DP ship under calm sea condition; blue circle represents reference phase portrait for rated voltage; dV, actual voltage derivative; dVr, derivative for rated voltage; dVP, actual voltage derivative for fundamental component phase 2π/3; V, voltage samples; Vr, reference voltage; VP, actual voltage samples for fundamental component phase 2π/3, coordinates of the mean point (blue): mean_dV = −0.362, mean_V = 0.856, and SQR(D) = 0.255.
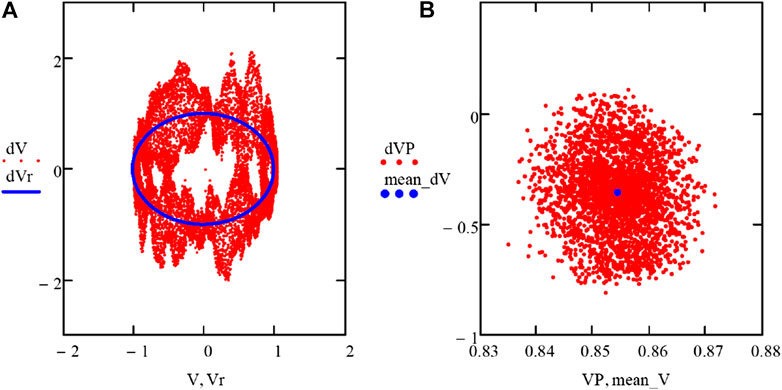
FIGURE 14. Scaled phase portrait (A) and Poincare map (B) calculated for phase 2π/3 and DP ship under rough sea condition; blue circle represents reference phase portrait for rated voltage, coordinates of the mean point (blue): mean_dV = −0.356, mean_V = 0.854, and SQR(D) = 0.180.
Comparing both the phase portraits and Poincare maps presented in Figure 11 for the chemical tanker ship and Figure 12 for the research-training ship, it can be concluded that the chemical tanker ship operation was closer to the chaotic behavior (but not necessarily achieving a state of chaos). An indicator of this fact is the phase trajectories as shown in Figures 11A and 12A, whereby, in the case of the training ship, the trajectory shown in Figure 12A can be considered as closer to a closed curve as compared to that in Figure 11A. A clearer evidence of stronger chaotic behavior is the greater dispersion of Poincare map points around the center point for the chemical tanker than for the training ship. Moreover, the differences of Poincare’s maps were reflected in the differences of the determined SQR(D) indicators.
Analysis of the above presented results reveals that both phase portraits and Poincare map enable detection of the oscillatory behavior of the maritime microgrids. For the systems with low level of oscillations, the area of phase portraits and Poincare map (understood as dispersion of red points in above figures) is very limited. An example of such systems is the research-training ship investigated in this paper. This is despite the fact that significant level of distortions is present. The distortions are caused by the non-controlled six pulse rectifier of the bow thruster drive, so there is a lack of the front end control, which can increase the level of oscillations.
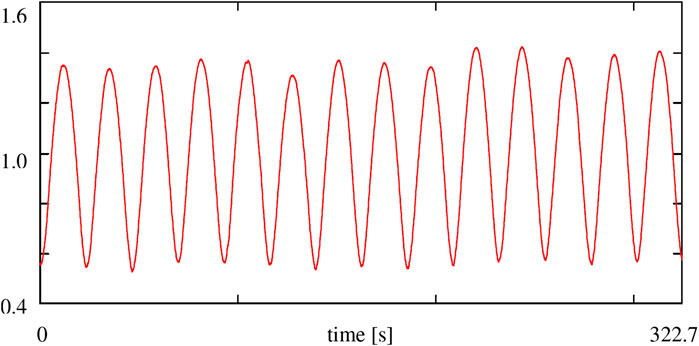
FIGURE 15. Quasi-periodic changes of SQR(D) values for DP ship and phase equal to 42.4°.
For the two other systems, the oscillatory behavior leads to increase of these areas. However, the chemical tanker phase portrait displays some regularity (lower level of red points dispersion). This is due to the fact that the oscillatory behavior of all considered parameters is similar in terms of frequencies of modulations. This is also confirmed by analysis of the above presented mean values of SQR(D) for every case. The DP ship with AFE is a more complex case with different characteristics of fluctuations of all parameters in terms of modulation frequencies. Therefore, its phase portrait displays the highest dispersion of results, despite the fact that the overall level of distortion is the lowest among all the considered vessels (lowest dV values). Moreover, the differences between phase portraits for calm and rough sea are visible. Unfortunately, the additional oscillations induced by irregular waves hardly impact the mean value of SQR(D), despite the increase in dispersion of points in the phase portrait. This may have resulted due to the low frequency of additional oscillations and mainly concerns the fundamental component. The oscillations of harmonics increase slightly. Since the frequency of these additional oscillations is low, its impact on Poincare map is invisible due to dynamic phase synchronization.
Next, the content of interharmonics is only a little lower than harmonics for DP ship, which also leads to the increase in the dispersion of points in phase portrait, particularly in comparison to the system installed onboard the research-training ship (narrow band harmonic distortions).
This behavior of DP ship voltage was the reason for additional investigation. The changes of the SQR(D) value over time was determined. These changes calculated for approximately 10 s, refreshed for each cycle, are shown in Figure 15.
The changes of the SQR(D) value presented in Figure 15 were observed only onboard the DP ship. Further detailed analysis of the AFE control is needed since the frequency of changes (0.043 Hz) is low and preliminary research excluded impact of fluctuating interharmonics not directly related to prime mover operation and sea waves, where the analysis of the current of AFE drive revealed similar behavior, i.e., SQR(D) calculated for AFE current also displayed such quasi-periodic changes with the same frequency. Additional research onboard of other DP ship revealed that this phenomenon can be related to high frequency power flow between AFE drives working in parallel.
Conclusion
The paper focuses on the oscillatory behavior of modern maritime microgrids with significant amount of power electronics in terms of the load power. The aim is an extensive case study of carefully selected examples that represent different classes of the microgrids. As a result, it provides some clues about maritime microgrids’ behavior depending on architecture, load characteristics, and sea conditions as well as future directions of research. It can be concluded that the dominant sources of the oscillatory behavior are fluctuations of rotational speed of generators' prime movers, and sometimes sea conditions. However, the final effect will depend on system architecture including particular solutions of power electronics and its associated control. It has also been proven that the characteristics of the oscillations of various considered parameters differ depending on the system architecture. Of particular interest is the case of AFE drives used for ship propulsion. For the system with such drives, the oscillations of fundamental voltage parameters were different from harmonics. This means that the frequency, fundamental voltage, and harmonics were modulated with different frequencies, although each is quasi-periodic for calm sea. For the rough sea condition, some additional irregularities were observed in the oscillations but the fundamental voltage and frequency were affected in particular, with only minor impact of sea waves on harmonics modulation.
Moreover, phase portraits can be used for fast detection of oscillatory behavior in maritime microgrids and their irregularities. The most important merit of such an approach is its simplicity. The calculations are fast and reliable. The dispersion of the results can be an approximate measure of the considered phenomenon.
Current research has not given an unequivocal answer about the application of the Poincare map for the oscillatory behavior assessment for shipboard systems and more research will be necessary. It seems that the impact of additional oscillations induced by heavy sea conditions can be hardly analyzed by this approach. However, the simplicity of the method and low computational burden encourages further work using this tool.
The future research will concentrate on the topic of assessment of oscillatory behavior and the stability margin in power electronics dominated microgrids (Wang et al., 2014; Zadeh et al., 2016; Zadeh et al., 2017; Wang et al., 2020), particularly maritime systems. There are number of methods used for the aim, e.g., the state-space-based approaches or impedance-based approaches (Zadeh et al., 2017; Wang et al., 2014; Wang et al., 2020). However, it is difficult to identify the source of harmonic instability in the power system by merely observing the experimental results (Wang et al., 2014). The detailed analysis would require more data than can be obtained from single place observation, for instance, control variables and measured variables (Zadeh et al., 2017). Next, the bifurcation theory is proposed to predict the parameter stability margin of non-linear system along with the change of parameters. However, in this case, the detailed knowledge about the system model parameters would be required (Zadeh et al., 2017; Keyvani-Boroujeni et al., 2020), which could not be obtained for investigated systems. In fact, one should remember that in general case of maritime microgrid, e.g., like above described DP ship, a number of factors have to be taken into account: generators’ prime movers modulated rotational speed, governors, and AVRs settings including droop control for load sharing, power converter parameters, and their control and finally irregularly modulated load of each drive. Therefore, the work will be pursued. The authors plan to concentrate on ships with electrical propulsion and carryout more investigations onboard more ships with AFE drives in the future.
Data Availability Statement
The datasets generated for this study are available on request to the corresponding author.
Author Contributions
TT proposed the content of the article, chose the examples, calculated the respective results by zoom-DFT and prepared figures, and wrote the paper. PJ and VS calculated phase portraits and Poincare maps for further analysis. AP and MG carried out registrations onboard of DP ship and research-training ship. JN registered ship rolling and pitching onboard of DP ship.
Funding
This work was partly supported by the National Science Center, Poland, under Grant DEC-2012/07/E/ST8/01688.
Conflict of Interest
Author JN was employed by the company MEWO S.A.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest
Acknowledgments
The authors would like to thank Mariusz Szweda for providing the samples of chemical tanker voltage.
References
Abarbanel, H., Brown, R., and Kadtke, J. (1990). Prediction in chaotic nonlinear systems: methods for time series with broadband fourier spectra. Phys. Rev. 41 (4), 1782–1807. doi:10.1103/physreva.41.1782
Bhanoo, M. (1998). “Uninterruptible power supply systems: nonlinear electrical load compatibility,” in 1998 IEEE annual textile, fiber and film industry technical conference (Cat. No. 98CH36246). Charlotte, NC. May 5–7, 1998. (New York, NY: IEEE). 679222.
Boashash, B. (1992). Estimating and interpreting the instantaneous frequency of a signal. I. Fundamentals. Proc. IEEE 80 (4), 520–538. doi:10.1109/5.135376
Carnì, D., and Fedele, G. (2009). “Improved evaluation of initial condition for the multi-sine fitting algorithm,” in 2009 IEEE international workshop on intelligent data acquisition and advanced computing systems: technology and applications. Rende, Italy. September 21–23, 2009. (New York, NY: IEEE), 492–495.
DeLevie, R. (2009). An improved numerical approximation for the first derivative. J. Chem. Sci. 121 (5), 935–950. doi:10.1007/s12039-009-0111-y
Garcia, N., and Acha, E. (2004). Periodic steady-state analysis of large-scale electric systems using poincaré map and parallel processing. IEEE Trans. Power Syst. 19 (4), 1784–1793. doi:10.1109/TPWRS.2004.831250
Gnaciński, P., Tarasiuk, T., Mindykowski, J., Pepliński, M., Górniak, M., Hallmann, D., et al. (2020). Power quality and energy-efficient operation of marine induction motors. IEEE Access. 8, 152193–152203. doi:10.1109/ACCESS.2020.3017133
Huang, Y., Huang, Z., Huang, B., and Xu, S. (2007). “CZT-based high performance frequency estimation,” in IEEE 15th signal processing and communications applications conference. Eskisehir, Turkey. June. 11–13, 2007. (New York, NY: IEEE), 4298767.
IEEE Standard 45.1 (2017). IEEE recommended Practice for electrical Installations on shipboard—design. Available at: https://ieeexplore.ieee.org/document/8007394.
IEEE Standard C37.118.1 (2011). IEEE standard for synchrophasor measurements for power systems. Available at: https://ieeexplore.ieee.org/document/6111219.
Jankowski, P. (2015). “Selected aspects of numerical solution of damped oscillator in ptc prime 3.0 environment. Available at: https://www.imeko.org/publications/wc-2015/IMEKO-WC-2015-TC21-397.pdf (Accessed December 21, 2020).
Jankowski, P., Piłat, A., and Tarasiuk, T. (2018). “The study of chaotic behaviour in the marine power system containing nonlinear varying load,” in 2018 international conference and exposition on electrical and power engineering (EPE). Iasi, Romania. October 18–19, 2018. (New York, NY: IEEE), 8559897.
Jayasinghe, S., Nayanasiri, D., Tashakori, A., Alahakoon, S., Fernando, N., and Vilathgamuwa, D. (2018). “MPC and energy storage based frequency regulation strategy for hybrid electric ships,” in IEEE 27th international symposium on industrial electronics. Cairns, QLD, Australia. June 13–15, 2018. (New York, NY: IEEE), 8433667.
Kantz, H., and Schreiber, T. (2004). Nonlinear time series analysis. Cambridge, United Kingdom: Cambridge University Press.
Keyvani-Boroujeni, B., Shahgholian, G., and Fani, B. (2020). A distributed secondary control approach for inverter-dominated microgrids with application to avoiding bifurcation-triggered instabilities. IEEE J. Emer. Sel. Top. Power Electron. 8 (4), 3361–3371. doi:10.1109/JESTPE.2020.2974756
Liu, W., Tarasiuk, T., Gorniak, M., Savaghebi, M., Vasquez, J. C., Su, C-L., et al. (2019). Power quality assessment in shipboard microgrids under unbalanced and harmonic AC bus voltage. IEEE Trans. Ind. Appl. 55 (1), 765–775. doi:10.1109/TIA.2018.2867330
Lloyd's Register (2019). Rules and regulations for the classification of ships. Available at: https://www.lr.org/en-in/rules-and-regulations-for-the-classification-of-ships/.
Mostarac, P., Hegeduš, H., and Malarić, R. (2010). “Novel frequency measurement method with low sampling time,” in Conference on precision electromagnetic measurements. Daejeon, South Korea. June 13–18, 2010. (New York, NY: IEEE), 5544520.
Prousalidis, J., Mouzakis, P., Sofras, E., Muthumuni, D., and Nayak, O. (2009). “On studying the power supply quality problems due to thruster start-ups,” in IEEE electric ship technologies symposium. Baltimore, MD. April 20–22, 2009. (New York, NY: IEEE), 440–448.
Prousalidis, J., Styvaktakis, E., Sofras, E., Hatzilau, I. K., and Muthumuni, D. (2007). “Voltage dips in ship systems,” in IEEE electric ship technologies symposium. Arlington, VA. May 21–23, 2007. (New York, NY: IEEE), 309–314.
Schuster H, G., and Just, W. (2005). Deterministic chaos. An introduction. Weinheim, Germany: Wiley VCH.
Skjong, E., Volden, R., Rødskar, E., Molinas, M., Johansen, T. A., and Cunningham, J. (2016). Past, present, and future challenges of the marine vessel’s electrical power system. IEEE Trans. Transportation Electrif. 2 (4), 522–537. doi:10.1109/TTE.2016.2552720
Tan, W., Varghese, M., Varaiya, P., and Wu, F. (1993). Bifurcation and chaos in power system. Sadhana 18 (5), 761–786. doi:10.1007/BF03024224
Tarasiuk, T. (2016). Angular frequency variations at microgrids and its impact on measuring instruments performance. IET Gener. Transm. Distrib. 10 (13), 3234–3240. doi:10.1049/iet-gtd.2015.1572
Tarasiuk, T., Zunino, Y., Bueno-Lopez, M., Silvestro, F., Pilat, A., and Molinas, M. (2020). Frequency fluctuations in marine microgrids: origins and identification tools. IEEE Electrif. Mag. 8 (3), 40–46. doi:10.1109/MELE.2020.3005698
Tomy, G., and Menon, D. (2016). “Power quality improvement strategy for non-linear load in single phase system,” in International conference on electrical, electronics, and optimization techniques. Chennai, India. March 3–5, 2016. (New York, NY: IEEE). 3489–3492.
Wang, S., Liu, Z., Liu, J., Boroyevich, D., and Burgos, R. (2020). Small-signal modeling and stability prediction of parallel droop-controlled inverters based on terminal characteristics of individual inverters. IEEE Trans. Power Electron. 35 (1), 1045–1062. doi:10.1109/TPEL.2019.2914176
Wang, X., Blaabjerg, F., and Wu, W. (2014). Modelling and analysis of harmonic stability in a AC power-electronics-based power system. IEEE Trans. Power Electron. 29 (12), 6421–6432. doi:10.1109/TPEL.2014.2306432
Xu, X., He, M., and Zheng, H. (2006). “Study of electric power quality improvement in ship networks,” in IEEE conference on industrial electronics and applications. Singapore, Singapore. May 24–26, 2006. (New York, NY: IEEE). 1–6.
Yip, P. (1976). Some aspects of the zoom transform. IEEE Trans. Comp. 25 (3), 287–296. doi:10.1109/TC.1976.5009255
Zadeh, M. K., Gavagsaz-Ghoachani, R., Martin, J., Pierfederici, S., Nahid-Mobarakeh, B., and Molinas, M. (2017). Discrete-time tool for stability analysis of DC power electronics-based cascaded systems. IEEE Trans. Power Electron. 32 (1), 652–667. doi:10.1109/TPEL.2016.2526740
Zadeh, M. K., Gavagsaz-Ghoachani, R., Pierfederici, S., Nahid-Mobarakeh, B., and Molinas, M. (2016). Stability analysis and dynamic performance evaluation of a power electronics-based DC distribution system with active stabilizer. IEEE J. Emer. Sel. Topics Power Electron. 4 (1), 93–102. doi:10.1109/JESTPE.2015.2484218
Keywords: maritime microgrid, power converters, harmonics, oscillations, phase portraits
Citation: Tarasiuk T, Jankowski P, Shagar V, Piłat A, Górniak M and Nowak J (2021) Comparative Case Study on Oscillatory Behavior in Power Systems of Marine Vessels With High Power Converters. Front. Energy Res. 8:529756. doi: 10.3389/fenrg.2020.529756
Received: 26 January 2020; Accepted: 16 December 2020;
Published: 22 January 2021.
Edited by:
Francisco Gonzalez-Longatt, University of South-Eastern Norway, NorwayReviewed by:
Chen Zhang, Norwegian University of Science and Technology, NorwayMehdi Zadeh, Norwegian University of Science and Technology, Norway
Daniel Guillen, Monterrey Institute of Technology and Higher Education (ITESM), Mexico
Copyright © 2021 Tarasiuk, Jankowski, Shagar, Piłat, Górniak and Nowak. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Tomasz Tarasiuk, dC50YXJhc2l1a0B3ZS51bWcuZWR1LnBs