 Yueqiao Hu
Yueqiao Hu Junlun Li
Junlun Li Haijiang Zhang1,2
Haijiang Zhang1,2
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
METHODS article
Front. Earth Sci., 13 June 2022
Sec. Solid Earth Geophysics
Volume 10 - 2022 | https://doi.org/10.3389/feart.2022.900435
This article is part of the Research TopicAdvances and Applications of Passive Seismic Source CharacterizationView all 12 articles
By taking advantage of the information carried by the entire seismic wavefield, Full Waveform Inversion (FWI) is able to yield higher resolution subsurface velocity models than seismic traveltime tomography. However, FWI heavily relies on the knowledge of source information and good initial models, and could be easily trapped into local minima caused by cycle skipping issue because of its high nonlinearity. To mitigate these issues in FWI, we propose a novel method called Waveform Energy Focusing Tomography (WEFT) for passive seismic sources. Unlike conventional FWI, WEFT back-propagates the seismic records directly instead of the data residuals, and updates the velocity models by maximizing the stacking energy for all the moment tensor components from back-propagated wavefields around the sources. Therefore, except for source locations and origin times, WEFT does not require other source attributes in advance for the inversion. Since WEFT does not aim at fitting synthetic and observed waveforms, it has lower nonlinearity and is less prone to the cycle skipping issue compared to FWI. For the proof of concept, we have validated WEFT using several 2D synthetic tests to show it is less affected by inaccurate source locations and data noise. These advantages render WEFT more applicable for tomography using passive seismic sources when the source information is generally not accurately known. Although the inverted model from WEFT is inevitably influenced by the source distribution as well as its radiation patterns, and its resolution is likely lower than that of FWI, it can act as an intermediate step between traveltime tomography and FWI by providing a more reliable and accurate velocity model for the latter.
Seismic tomography is an essential approach for imaging the subsurface structure. The well-established seismic traveltime tomographic methods based on ray theory have had many successful applications in imaging structures at different scales in the past few decades (e.g., Bording et al., 1987; Lanz et al., 1998; Rawlinson and Sambridge, 2003; Zhang and Thurber, 2003). More recently, Full Waveform Inversion (FWI) has also been developed and applied at many different scales (Ravaut et al., 2004; Bleibinhaus et al., 2007; Fichtner et al., 2013; Adamczyk et al., 2015; Bozdağ et al., 2016), as it can potentially obtain models with higher resolution by using more information carried in the waveforms (Virieux and Operto, 2009; Alkhalifah, 2014).
Traditional FWI inverts for subsurface velocities by minimizing the L2-norm misfit between the observed and simulated seismic waveforms (Tarantola, 1984; Pratt and Worthington, 1990). In spite of some successful applications on both active and passive seismic data (Brenders and Pratt, 2007; Fichtner et al., 2009, 2013; Tape et al., 2009, 2010; Warner et al., 2013; Operto et al., 2015), there are still practical issues and challenges yet to be solved in FWI. One of the critical issues is that FWI tends to fall into local minima when the time delay between the synthetic and observed waveforms is larger than half a cycle due to inaccurate starting velocity models, which is referred to as the cycle skipping (Virieux and Operto, 2009). Many efforts have been devoted to solving this problem from different aspects. For example, the multiscale strategy (Bunks et al., 1995; Sirgue and Pratt, 2004), which sequentially performs inversion from lower to higher frequencies, can efficiently avoid cycle skipping since waveforms at lower frequencies have broader cycles. Shin and Cha (2008), Shin and Cha (2009) extended the time-domain FWI to the Laplace-domain and Laplace-Fourier domain to build long-wavelength velocity models and increase the stability of the inversion. Choi and Alkhalifah (2015) developed the unwrapped phase inversion combined with exponential damping, which can avoid cycle-based jumps even when low-frequency information is missing.
Since the objective function based on the L2-norm often has stronger nonconvexity, a variety of misfit functionals have been proposed to measure the discrepancies between the observed and synthetic waveforms. The cross-correlation based objective functions (e.g., Luo and Schuster, 1991; van Leeuwen and Mulder, 2010) were proposed to measure the similarity between the observed and synthetic data, which are more dependent on the waveform kinematics and thus mitigate issues related to amplitudes. Although these objective functions are less susceptible to cycle skipping, a band-limited or non-impulsive source function may still affect the measurement of waveform discrepancies. The deconvolution-based objective function (Luo and Sava 2011) is thus proposed to alleviate the issue. The misfit measured by the discrepancy in waveform envelopes can be used to retrieve the long-wavelength component of a velocity model, and thus reduce the dependence of FWI on the initial model (Bozdağ et al., 2011; Wu et al., 2014; Luo and Wu, 2015; Oh and Alkhalifah, 2018). In addition, the misfit functions based on the optimal transport provide an alternative in an attempt to overcome the cycle skipping issue (Engquist and Froese, 2013; Métivier et al., 2016; Yang and Engquist, 2018). Recently, the new methods related to non-physical model extensions, such as reconstructed wavefields (van Leeuwen and Herrmann, 2013; Wang et al., 2016; Alkhalifah and Song, 2019), time lag extension (Yang and Sava, 2013; Biondi and Almomin, 2014), and matching filter (Luo and Sava, 2011; Warner and Guasch, 2016; Huang et al., 2017; Sun and Alkhalifah, 2019; Li and Alkhalifah, 2021) are also attractive for their stronger resistance to cycle skipping.
The source information is essential for FWI when calculating the synthetic waveforms, which is oftentimes inaccurate or even unknown. For an active seismic survey, though the source wavelet (or source time function) can be extracted directly from the near-offset traces (Schuster, 2017), the extraction is often successful only for data with high signal-to-noise ratios (SNRs). Owing to the linear relationship between the source attributes and the seismic data, the source wavelet can be obtained by solving a linear equation by assuming a relatively accurate velocity model is available (Pratt, 1999). Additionally, several strategies were also proposed to remove the influence of source wavelet based on convolution (Choi et al., 2005; Cheong et al., 2006; Choi and Alkhalifah, 2011; Wang and Alkhalifah, 2018; Wang et al., 2020) or deconvolution (Lee and Kim, 2003; Xu et al., 2006) of reference traces in both time and frequency domains. However, it may not be a trivial task to choose a reference trace for real-data applications.
In addition to the source time function, for passive seismic sources, the source moment tensor is also needed for FWI. Using the information from first motion polarities (e.g., Rau et al., 1996; Hardebeck and Shearer 2002), and/or the S/P amplitude ratios (Julian et al., 1998; Hardebeck and Shearer, 2003), to full waveforms (Li et al., 2011; Zhu and Ben-Zion, 2013; Willacy et al., 2019), source moment tensors can be characterized with increasing reliability. However, the inversion process inevitably becomes more computationally expensive and more complicated, and it generally requires a more accurate velocity model (Kim et al., 2011; Eyre and van der Baan, 2015). When the surface seismic acquisition array is dense, Time Reversal (TR) methods (Larmat et al., 2006; Kawakatsu and Montagner, 2008; Artman et al., 2010; Gharti et al., 2011; Chambers et al., 2014; Nakata and Beroza, 2016; Sun et al., 2016) based on seismic migration can be used to image the source attributes directly by back-propagating the observed data. For instance, for the microseismic datasets which have relatively lower SNR, not only phase picking is avoided, but also the influence of noise can be mitigated by stacking the back-propagated wavefields from many individual receivers with the TR methods (Gharti et al., 2011). However, the source attributes may not be well reconstructed if the observation array cannot record a sufficient amount of wavefield information from the source (Bazargani and Snieder, 2016). Furthermore, methods based on the machine learning, which demand less processing effort and computational costs, have become more appealing for obtaining the information of passive seismic sources (Kriegerowski et al., 2019; van den Ende and Ampuero, 2020; Wang and Alkhalifah, 2021; Smith et al., 2022). The seismic moment tensor can be determined according to the first-motion polarities picked by deep learning (Ross et al., 2018; Hara et al., 2019; Uchide, 2020). Kuang et al. (2021) proposed the Focal Mechanism Network (FMNet) to determine the seismic moment tensor directly from seismic waveforms. Based on the Bayesian Neural Networks (BNNs), Steinberg et al. (2021) estimated the moment tensor of earthquakes as well as parameter uncertainties. Although the machine-learning based methods can efficiently estimate source mechanisms, those methods are still limited by predefined Earth models and station distributions used for training the neural networks.
In order to overcome the aforementioned problems, many methods have been developed to invert for the velocity models with passive seismic sources. Using the variable projection method, Sun et al. (2016) developed a framework of joint full-waveform inversion to obtain velocity models and passive seismic source locations simultaneously. Song et al. (2019a) proposed an objective function to invert for velocities and estimate source locations together by penalizing source energy away from the source location. Based on the geometric-mean imaging condition (Nakata and Beroza, 2016), Lyu and Nakata (2020) performed passive-source location and velocity inversion using FWI iteratively. However, these methods failed to consider the influence of the source radiation pattern, and corresponding FWI schemes still have high nonlinearity. By focusing different modes (PP, SS and PS) of the source images, a variety of methods for determining source locations as well as velocity models (Vp, Vs.) (Witten and Shragge, 2017; Rocha et al., 2019; Oren and Shragge, 2021; Oren and Shragge, 2022) have been developed using different imaging conditions. Since modeling elastic wavefields (both P- and S wave) is necessary for these methods, the computational cost is rather demanding, especially for 3D cases. Inspired by the TR principle, Lellouch and Landa (2018) used a minimum variation criterion to evaluate the coherency among focused sources and estimated the velocity model. Nevertheless, the influence of the source radiation pattern from different source mechanisms was still ignored, and trace normalization was used instead to mitigate the source effect.
For seismic exploration data using active seismic sources, to mitigate the aforementioned challenges in FWI, Zhang and Wang (2009) proposed a new method implemented in the tau-p domain by maximizing the stacking energy of the back-propagated wavefield at the source locations. Jin and Plessix (2013) further modified this method and used a volume centered at the source position instead of a single grid point for energy stacking in the data domain. Though the dependence on waveform fitting and the initial model is largely relaxed with the energy stacking approach, their methods were designed for active sources and are not directly applicable for earthquake sources with distinct source radiation patterns, which emanate waves with varying amplitudes and polarities in different directions.
In this study, we further extend the method of Jin and Plessix (2013) to passive sources. Since the locations of passive seismic sources and accompanying 1D layered structures (Kissling et al., 1995) or full 3D velocity models (Thurber, 1992) can be determined simultaneously using arrival times picked manually or automatically, we assume that the rough source locations are known a priori in this study while the uncertainties are also taken into consideration. The new method inverts for the velocity model by maximizing the spatiotemporally stacking energy for all the moment time functions from the back-propagated wavefields around the source location over a short time window and a limited volume, and the source attributes except for the rough source locations are therefore not required in advance. A multiscale strategy is also applied to stabilize the inversion. We will first present the newly proposed method and then validate the method with several numerical examples in two dimensions for simplicity.
Based on the reversibility of wave propagation through simulation means, the time-reversal technique can refocus the back-propagated wavefields and maximize the stacking energy at the source location and origin time if the velocity model is correct (McMechan, 1982; Fink, 1997). Therefore, the amount of energy focused around the source can be used as the criterion for optimizing a velocity model when the source location is roughly known (Zhang and Wang, 2009; Jin and Plessix, 2013). For passive seismic sources, we measure the stacking energy for all the moment time functions from back-propagated wavefields. For simplicity, we first propose the method based on the 2D observation geometry in this study. The corresponding objective function in 2D is
where
With the time-reversal imaging (TRI),
where
in which
Using the relationship with differentiation, the estimated moment tensor components can be derived by taking a partial derivative of back-propagated wavefield
Considering that many well-established seismic location methods, including the ray-based (Waldhauser and Ellsworth, 2000; Zhang and Thurber, 2003; Eisner et al., 2009), migration-based (McMechan, 1982; Artman et al., 2010; Sava, 2011; Nakata and Beroza, 2016; Song and Alkhalifah, 2019; Song et al., 2019b) and full-waveform-based (Kaderli et al., 2015; Wang and Alkhalifah, 2018; Willacy et al., 2019) methods, have been widely employed, we assume that the source locations are provided a priori and the influence of location error will be discussed later. To mitigate the effect of the source location error, a spatialtemporal weighting function
where
where
To update the velocity model, we need to calculate the derivative of
where
According to the Lagrange multiplier method (Hestenes, 1969), we define a new function
where
where the displacement
After substituting Equation 12 into (Equation 11) and letting the partial derivatives of Equation 11 with respect to
For time-reversal imaging, Equation 13 can be expressed as
and the adjoint source of WEFT can be defined as
in which
which is similar to Equation 8.
Solving Equation 11, the gradient of the objective function can be expressed as
According to the relationship between the pressure and particle velocity in Equation 8, the gradient can be written as
where
The workflow of WEFT is summarized in Figure 1. In each iteration, there are two essential steps: 1) the observed data are first back-propagated and the adjoint source is constructed; 2) the gradient is calculated by correlating the time derivative of back-propagated wavefield with the forward wavefield emanating from the adjoint source according to Equation 18. Then the conjugate gradient method (Mora, 1987) is used to update the velocity model iteratively and the backtracking line search method is applied to determine the proper step length. When the pre-defined number of iterations is reached or the increase in energy levels off, the inversion is terminated. Though there are many similarities in the implementation between WEFT and FWI, some noticeable differences still exist. The major difference is that WEFT back-propagates the recorded seismic data, whereas FWI back-propagates the residual waveforms between the recorded and synthetic data. Moreover, the moment time functions for a source must be provided a priori in FWI, whereas the source attributes except for rough source locations are not required for WEFT in advance.
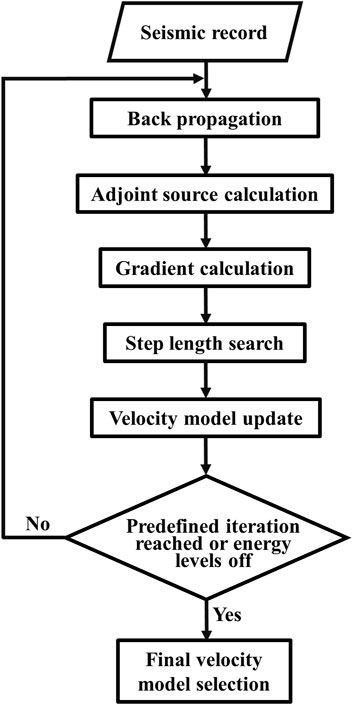
FIGURE 1. The workflow of WEFT for passive source tomography.
To validate WEFT, we perform a series of synthetic tests using heterogeneous models in 2D. The true velocity model (Figure 2A) used for the following numerical experiments is adapted from the widely used Marmousi model (Martin et al., 2002). Both the true and smooth initial velocity models (Figures 2A,B) are from Schuster (2017). A Ricker wavelet with central frequency of 15 Hz is chosen as the source time function. The source-receiver configuration consists of 201 receivers on the surface with an interval of 20 m, and 31 passive sources located in the subsurface (Figure 2). These sources are distributed into 6 clusters. We should emphasize that the synthetic model used here is for the proof of concept for the proposed WEFT method and may not follow the actual scenarios for earthquake monitoring. However, with more and more dense seismic arrays used for monitoring induced seismicity, the distribution of dense receivers and shallow passive seismic sources are actually expected, such as the dense geophones used for monitoring shale gas hydraulic fracturing (Eisner et al., 2010; Staněk and Eisner, 2013; Anikiev et al., 2014).
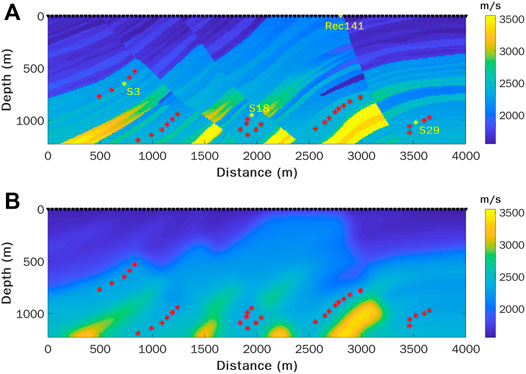
FIGURE 2. 2D velocity models used for synthetic tests with WEFT. (A) The true model adapted from the Marmousi model. (B) The initial model used for WEFT. The inverted triangles at the top of the model denote the 201 receivers with an interval of 20 m, and the asterisks within the model denote the 31 earthquake sources. The yellow asterisks and the yellow inverted triangle indicate the sources and receiver used for the data comparison in Figure 8.
Following the approach now commonly used in FWI, which sequentially utilizes observed data with increasing frequencies (Bunks et al., 1995), a multiscale strategy is also adopted in WEFT. After a predefined number of iterations is reached for a certain frequency band, the final velocity model is used as the initial model for the next frequency band. Since the source location used in this case is accurate, we choose a small spatial aperture
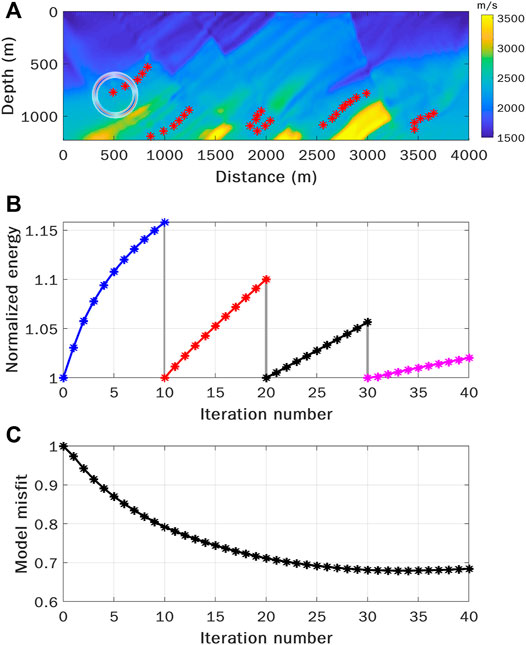
FIGURE 3. Velocity inversion with WEFT using passive sources with a uniform radiation pattern. (A) The inverted velocity model by WEFT using the multiscale strategy. The source radiation pattern is indicated by the small adjacent ring. (B) The focused energy with iterations at the source locations. For the focused energy, their values are renormalized by the respective values at the first iteration in every frequency band (indicated by different colors). Waveforms in four frequency bands, 1–5 Hz, 1–9 Hz, 1–16 Hz, and 1–28 Hz are sequentially used for updating the velocity model, with 10 iterations in each band. (C) The normalized model misfit measured by L2-norm as a function of iterations.
We further test a more complicated scenario where six seismic clusters having different types of source moment tensors (Figure 4A). The spatialtemporal aperture used here is the same as in the previous case. The model inverted by the multiscale WEFT is shown in Figure 4B. Though the varying radiation patterns from different clusters pose a considerable challenge for waveform inversion, WEFT still inverts for the heterogeneous Marmousi model accurately. Compared to the true model, there are some minor artifacts in the inverted model, which are probably caused by the varying radiation patterns that can result in complicated directional illuminations in resolving the model. Although the stacking energy (Figure 4C) increases with iteration in each frequency band as expected, the model misfit (Figure 4D) undesirably also increases slightly in the last frequency band, which suggests the inversion was trapped in a local minimum for high-frequency data. Nevertheless, this example demonstrates that WEFT can be applied directly to surface seismic monitoring datasets in which seismic sources occur on different faults are with varying orientations and slipping angles.
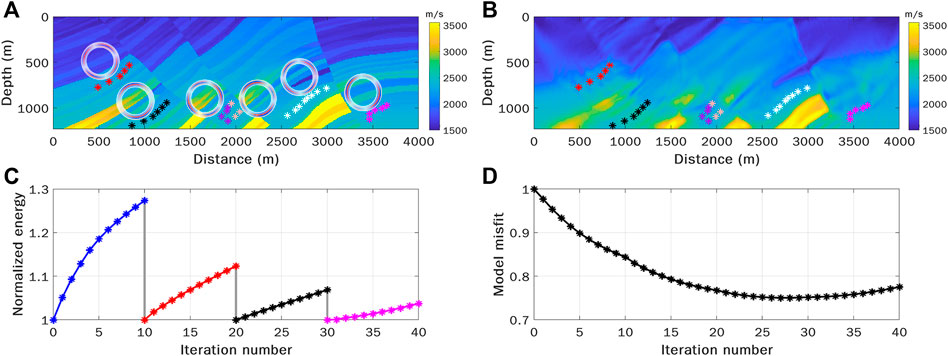
FIGURE 4. Velocity inversion with WEFT using passive sources with varying radiation patterns. (A) Distribution of six seismic clusters (colored asterisks), each of which has a distinct radiation pattern indicated by small adjacent rings. The true velocity model is shown in the background. (B) The model inverted by multiscale WEFT with seismic sources in (A). (C)The focused energy with iterations at the source locations. (D) The normalized model misfit measured by L2-norm as a function of iterations.
In WEFT, the source location is used to determine the spatial volume for evaluating the focused energy (Equation 7), and for the adjoint source injection when calculating the adjoint wavefield (
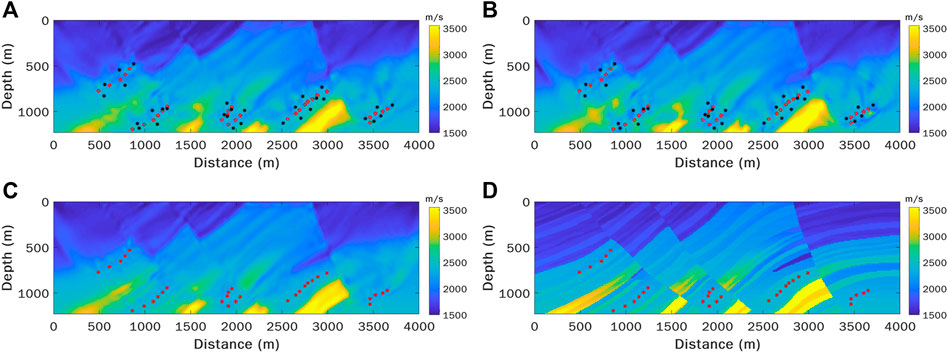
FIGURE 5. Comparison of the velocity inversion results with different focusing apertures and with or without source location errors. (A) The model inverted with the smaller apertures (
Since WEFT evaluates the magnitudes of the back-propagated energy focused around the hypocenters instead of matching the wiggles between the observed and synthetic waveforms at the receivers, the proposed method has less nonlinearity and is more robust since there is less cycle-skipping issues as commonly seen in conventional FWI. Figure 6B shows a comparison of objective functions of FWI and WEFT for a simple source-receiver configuration (Figure 6A), where the passive source is located at 1,000 m in depth and a single receiver is on the surface. It is obvious that the objective function of FWI has multiple local minima compared to that of WEFT, which has a more convex behavior globally and has only a single global minimum for this scenario.
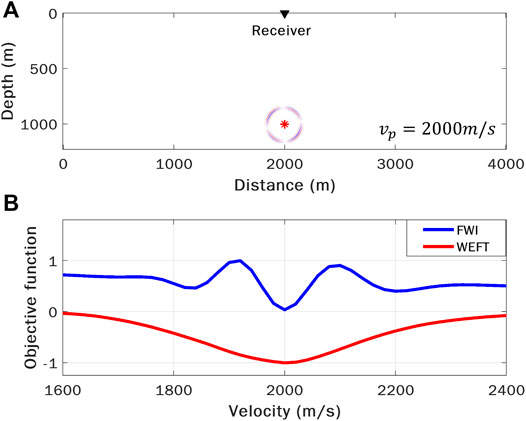
FIGURE 6. Comparison of the objective functions between FWI and WEFT. (A) The source-receiver configuration used for calculating the objective functions. The source radiation pattern is indicated by the small adjacent ring. The velocity model is homogenous with Vp equal to 2000 m/s. (B) Comparison of the normalized objective functions for FWI (blue) and WEFT (red) with respect to different velocities.
The lower nonlinearity of WEFT can also facilitate velocity inversion from a poor initial velocity model. In Figure 7, we further compare the inversion results between WEFT and conventional traveltime tomography using an even smoother initial velocity model (Figure 7A). Compared to the true model, many small heterogeneities and contrasts are recovered in the inverted model by WEFT (Figure 7C), while only the tilted high-velocity bodies at the bottom of the model are distorted. In comparison, the inverted model by traveltime tomography (Figure 7B) appears much smoother and lack fine details. Starting from the final inverted model from WEFT, we perform FWI to further update the velocity (Figure 7D), and even more details are added to the model. It should be stressed again that WEFT does not require source moment time functions in the inversion, while FWI does. Using the final velocity models inverted by WEFT and traveltime tomography shown in Figure 7, we generate synthetic waveforms and compare the
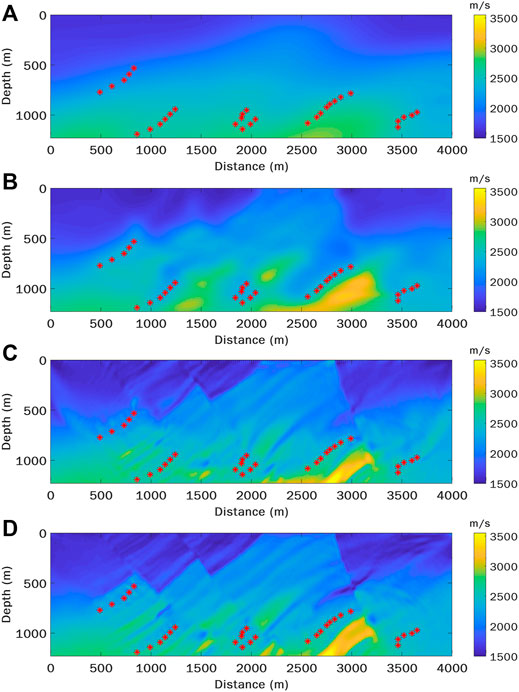
FIGURE 7. The inverted models using traveltime tomography and WEFT from a rather smooth initial model. (A) The rather smooth initial model. (B) The model inverted by traveltime tomography. (C) The model inverted by multiscale WEFT. (D) The model further inverted by multiscale FWI starting from the WEFT model in (C).
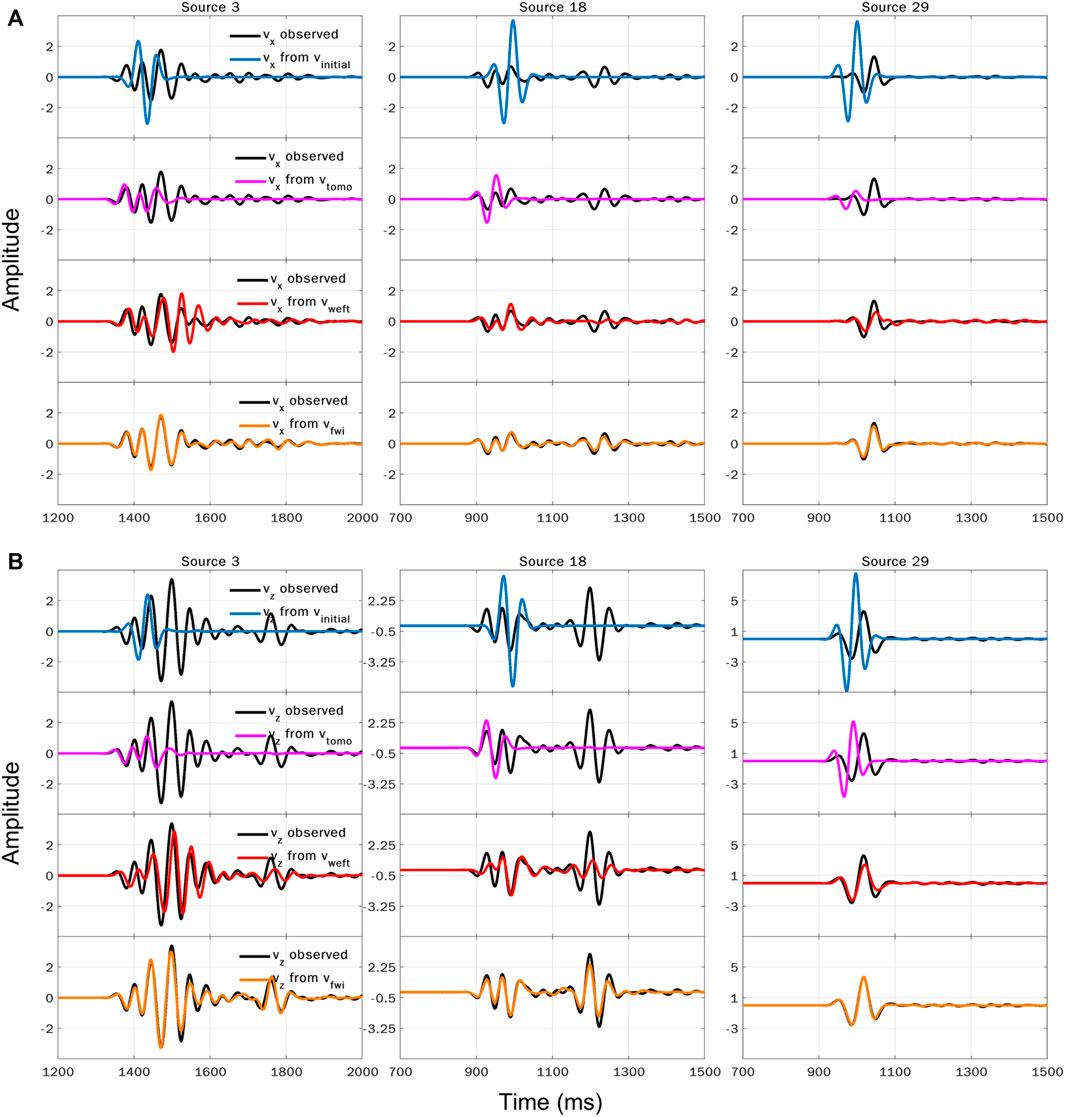
FIGURE 8. Comparison of waveforms for the (A)
We further test the stability and accuracy of WEFT with noisy observed data (Figure 9A). In this experiment, the synthetic data are contaminated by random Gaussian noise, which is not coherent among receivers, and the SNR is about 0.3. For the noisy data, it is difficult to obtain a relatively accurate velocity model by conventional FWI without sophisticated data preprocessing. However, it is still possible to apply WEFT with the noisy data. This is because although the seismic signals are initially buried in the noise, the coherent signals can be gradually enhanced against the inherent noise with back-propagation. In other words, wavefield back-propagation specifically focuses the energy of the microseismic event and thus suppresses incoherent noise, which can be seen in the snapshots of the back-propagated wavefields at a certain time with noise-free and noisy data (Figures 9B,C, respectively). Compared with the inverted model from the noise-free data (Figure 3), the inverted model with the noisy data is similar (Figure 10A), and the model misfit (Figure 10C) still shows a considerable reduction. This test demonstrates that WEFT is rather resilient to incoherent noise, which can be a considerable advantage over FWI.
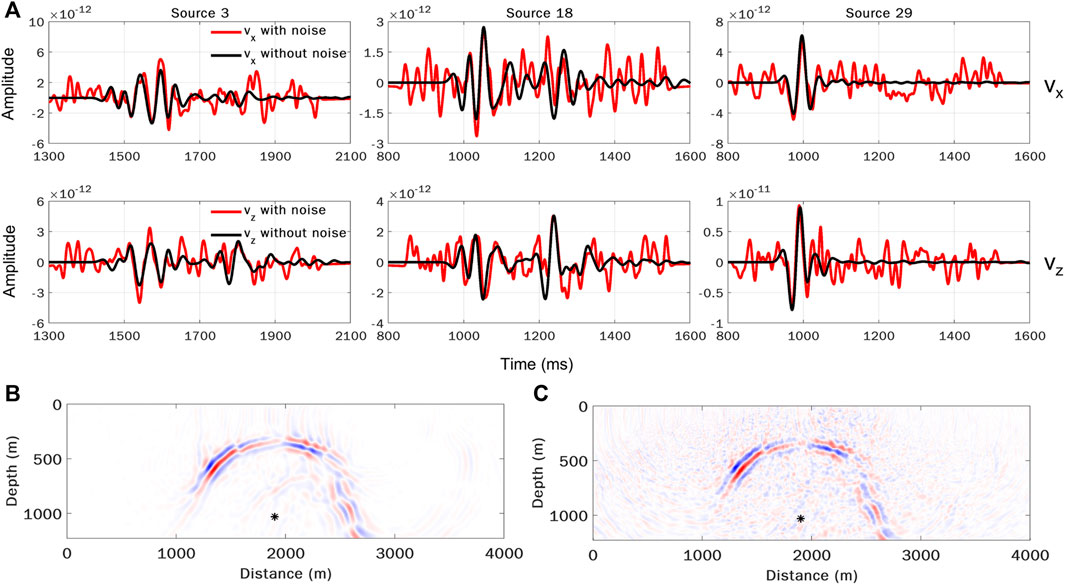
FIGURE 9. The comparison between the noisy and noise-free synthetic data used for WEFT. (A) Noisy and noise-free traces at selected receivers. The source radiation pattern is the same as that shown in Figure 3. The black lines indicate the noise-free data, and the red lines indicate the noisy data by superposing the noise-free data with random Gaussian noise with limited bandwidth. The distributions of the sources and receivers are the same as those shown in Figure 2. (B) and (C) show the snapshots of the back-propagated wavefield with noise-free and noisy data, respectively.
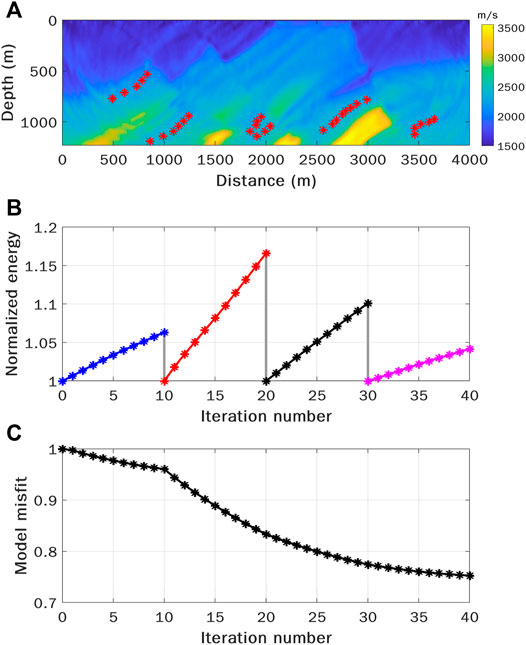
FIGURE 10. Results of multiscale WEFT using data with random Gaussian noise with limited bandwidth. (A) The inverted velocity model with multiscale WEFT. (B) The focused energy with iterations at the source locations. The parameters used in the inversion are similar to those used in Figure 3. (C) The normalized model misfit measured by L2-norm as a function of iterations.
Considering that the distribution of sources and the source mechanisms may have a noticeable influence on the inverted model, we further perform a challenging test where 10 earthquakes with a uniform radiation pattern are distributed within a narrow depth range of 60 m, as shown in Figure 11A. Starting from the initial model shown in Figure 11B, two distinct source mechanisms are used for comparison. The inverted models using sources with different radiation patterns (indicated by the small adjacent ring) are shown in Figures 11C,E, respectively. The comparison of the velocity profiles at the position x = 2,310 m is shown in Figures 11D,F, respectively. We found that, as expected, most of the effective update is within the central part of the model above the earthquake sources due to the limited source illumination. Besides, different source mechanisms, which result in varying illumination patterns, inevitably have an impact on the inverted models. Due to the poor source distribution, the recovered models are not as good as those shown before. However, both inverted models are updated successfully compared to the initial one, especially the model shown in Figures 11C,D.
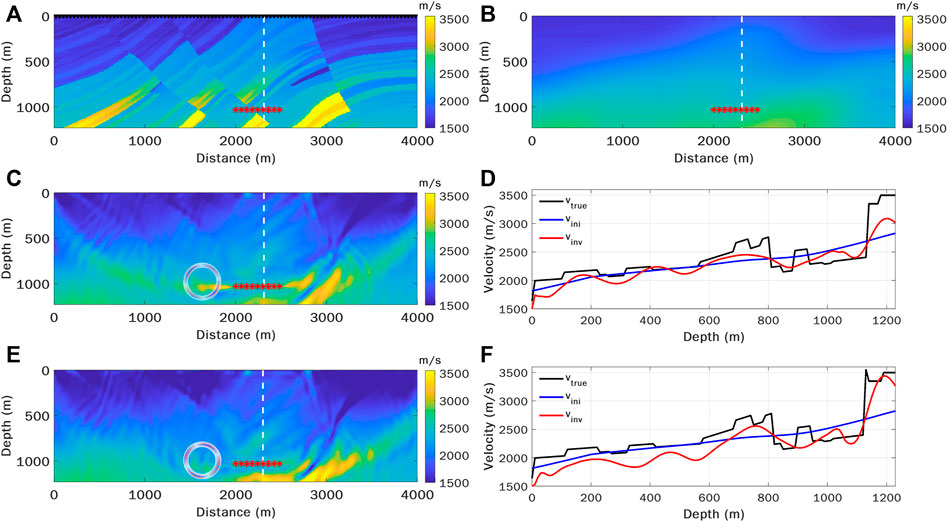
FIGURE 11. Comparison of the velocity inversion results using clustered earthquakes in a narrow depth range with uniform focal mechanisms. (A) The distributions of 10 sources (red asterisks) and 199 receivers (black inverted triangles) with the true model in the background. (B) The initial model used for WEFT. (C) and (E) are the inverted models using sources with two distinct focal mechanisms (indicated by small adjacent rings). (D) and (F) are the corresponding comparisons of the true (black), initial (blue) and inverted (red) velocity profiles at x = 2,310 m (indicated by a white dash line).
We propose a new seismic tomography method called Waveform Energy Focusing Tomography for passive seismic sources. Compared to FWI, WEFT inverts for the velocity model by maximizing the energy of the moment time functions from back-propagated wavefields around the sources, instead of matching synthetic and observed waveforms at the receivers. As a result, WEFT has lower nonlinearity in the inversion and can avoid the cycle skipping issue in FWI. More importantly, except for the source locations and origin times, WEFT does not require other source attributes including source time functions and focal mechanisms. This means that more earthquakes with smaller magnitudes and unknown source mechanisms can also be used by WEFT.
We have shown the effectiveness and advantages of WEFT through several 2D synthetic tests based on the Marmousi model. WEFT can still perform well on different challenging cases when passive seismic sources have different radiation patterns, when the initial velocity model is rather smooth, and when waveforms are very noisy. Nevertheless, the quality of inverted models can still be affected by uneven illumination due to distributions and mechanisms of sources. Although waveform matching at the receivers is not directly considered in the objective function of WEFT, the synthetic tests show that the waveform matching using the inverted model by WEFT is still satisfactory, much better than the velocity model inverted by traveltime tomography using arrival times. It should be noted that WEFT yields velocity models with slightly lower resolution compared to FWI. Therefore, WEFT can act as an intermediate step between seismic traveltime tomography and FWI by providing a more accurate and reliable starting velocity model for the latter.
In this study, for simplicity we validate WEFT with passive seismic sources under the 2D acoustic assumption. This method can also be extended to 3D for real applications such as dense-array monitoring of local seismicity from fault zones or hydraulic fracturing when the receivers are not distributed along a straight line or the passive sources have an areal distribution, which will be shown in a future study.
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
YH, JL, and HZ all contributed to the study. YH performed the numerical tests and wrote the first draft of the manuscript. All authors contributed to the revision and approved the submitted version.
This research is supported by the National Natural Science Foundation of China under grants 41961134001 and 41874048, and supported by the National Key Research and Development Projects 2021YFC3000602 and 2018YFC1504102.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
The authors would like to thank Haipeng Li for his many helpful discussions. We also thank two reviewers and editor Tariq Alkhalifah for their very helpful comments in improving our manuscript.
Adamczyk, A., Malinowski, M., and Górszczyk, A. (2015). Full-waveform Inversion of Conventional Vibroseis Data Recorded along a Regional Profile from Southeast Poland. Geophys. J. Int. 203, 351–365. doi:10.1093/gji/ggv305
Alkhalifah, T. (2014). Full Waveform Inversion in an Anisotropic World: Where Are the Parameters Hiding. European Association of Geoscientists and Engineers (EAGE).
Alkhalifah, T., and Song, C. (2019). An Efficient Wavefield Inversion: Using a Modified Source Function in the Wave Equation. Geophysics 84, R909–R922. doi:10.1190/geo2018-0759.1
Anikiev, D., Valenta, J., Staněk, F., and Eisner, L. (2014). Joint Location and Source Mechanism Inversion of Microseismic Events: Benchmarking on Seismicity Induced by Hydraulic Fracturing. Geophys. J. Int. 198 (1), 249–258. doi:10.1093/gji/ggu126
Artman, B., Podladtchikov, I., and Witten, B. (2010). Source Location Using Time-Reverse Imaging. Geophys. Prospect. 58, 861–873. doi:10.1111/j.1365-2478.2010.00911.x
Bazargani, F., and Snieder, R. (2016). Optimal Source Imaging in Elastic Media. Geophys. J. Int. 204, 1134–1147. doi:10.1093/gji/ggv494
Biondi, B., and Almomin, A. (2014). Simultaneous Inversion of Full Data Bandwidth by Tomographic Full-Waveform Inversion. Geophysics 79, WA129–WA140. doi:10.1190/geo2013-0340.1
Bleibinhaus, F., Hole, J. A., Ryberg, T., and Fuis, G. S. (2007). Structure of the California Coast Ranges and San Andreas Fault at SAFOD from Seismic Waveform Inversion and Reflection Imaging. J. Geophys. Res. Solid Earth 112, 4611. doi:10.1029/2006jb004611
Bording, R. P., Gersztenkorn, A., Lines, L. R., Scales, J. A., and Treitel, S. (1987). Applications of Seismic Travel-Time Tomography. Geophys. J. Int. 90, 285–303. doi:10.1111/j.1365-246x.1987.tb00728.x
Bozdağ, E., Peter, D., Lefebvre, M., Komatitsch, D., Tromp, J., Hill, J., et al. (2016). Global Adjoint Tomography: First-Generation Model. Geophys. J. Int. 207, 1739–1766. doi:10.1093/gji/ggw356
Bozdağ, E., Trampert, J., and Tromp, J. (2011). Misfit Functions for Full Waveform Inversion Based on Instantaneous Phase and Envelope Measurements. Geophys. J. Int. 185, 845–870. doi:10.1111/j.1365-246X.2011.04970.x
Brenders, A. J., and Pratt, R. G. (2007). Full Waveform Tomography for Lithospheric Imaging: Results from a Blind Test in a Realistic Crustal Model. Geophys. J. Int. 168, 133–151. doi:10.1111/j.1365-246x.2006.03156.x
Bunks, C., Saleck, F. M., Zaleski, S., and Chavent, G. (1995). Multiscale Seismic Waveform Inversion. Geophysics 60, 1457–1473. doi:10.1190/1.1443880
Chambers, K., Dando, B. D. E., Jones, G. A., Velasco, R., and Wilson, S. A. (2014). Moment Tensor Migration Imaging. Geophys. Prospect. 62, 879–896. doi:10.1111/1365-2478.12108
Cheong, S., Pyun, S., and Shin, C. (2006). Two Efficient Steepest-Descent Algorithms for Source Signature-free Waveform Inversion: Synthetic Examples. J. Seismic Explor. 14, 335.
Choi, Y., and Alkhalifah, T. (2011). Source-independent Time-Domain Waveform Inversion Using Convolved Wavefields: Application to the Encoded Multisource Waveform Inversion. Geophysics 76, R125–R134. doi:10.1190/geo2010-0210.1
Choi, Y., and Alkhalifah, T. (2015). Unwrapped Phase Inversion with an Exponential Damping. Geophysics 80, R251–R264. doi:10.1190/geo2014-0498.1
Choi, Y., Shin, C., Min, D.-J., and Ha, T. (2005). Efficient Calculation of the Steepest Descent Direction for Source-independent Seismic Waveform Inversion: An Amplitude Approach. J. Comput. Phys. 208, 455–468. doi:10.1016/j.jcp.2004.09.019
Eisner, L., Duncan, P. M., Heigl, W. M., and Keller, W. R. (2009). Uncertainties in Passive Seismic Monitoring. Lead. Edge 28, 648–655. doi:10.1190/1.3148403
Eisner, L., Williams-Stroud, S., Hill, A., Duncan, P., and Thornton, M. (2010). Beyond the Dots in the Box: Microseismicity-Constrained Fracture Models for Reservoir Simulation. Lead. Edge 29 (3), 326–333. doi:10.1190/1.3353730
Engquist, B., and Froese, B. D. (2013). Application of the Wasserstein Metric to Seismic Signals. arXiv preprint arXiv:1311.4581.
Eyre, T. S., and van der Baan, M. (2015). Overview of Moment-Tensor Inversion of Microseismic Events. Lead. Edge 34, 882–888. doi:10.1190/tle34080882.1
Fichtner, A., Kennett, B. L. N., Igel, H., and Bunge, H.-P. (2009). Full Seismic Waveform Tomography for Upper-Mantle Structure in the Australasian Region Using Adjoint Methods. Geophys. J. Int. 179, 1703–1725. doi:10.1111/j.1365-246x.2009.04368.x
Fichtner, A., Trampert, J., Cupillard, P., Saygin, E., Taymaz, T., Capdeville, Y., et al. (2013). Multiscale Full Waveform Inversion. Geophys. J. Int. 194, 534–556. doi:10.1093/gji/ggt118
Gharti, H. N., Oye, V., Kühn, D., and Zhao, P. (2011). “Simultaneous Microearthquake Location and Moment-Tensor Estimation Using Time-Reversal Imaging,” in 81st Annual International Meeting, SEG Technical Program Expanded Abstracts 2011, San Antonio, 1632–1637.
Hara, S., Fukahata, Y., and Iio, Y. (2019). P Wave First-Motion Polarity Determination of Waveform Data in Western Japan Using Deep Learning. Earth Planets Space 71, 1–11. doi:10.1186/s40623-019-1111-x
Hardebeck, J. L., and Shearer, P. M. (2002). A New Method for Determining First-Motion Focal Mechanisms. Bull. Seismol. Soc. Am. 92, 2264–2276. doi:10.1785/0120010200
Hardebeck, J. L., and Shearer, P. M. (2003). Using S/P Amplitude Ratios to Constrain the Focal Mechanisms of Small Earthquakes. Bull. Seismol. Soc. Am. 93, 2434–2444. doi:10.1785/0120020236
Hestenes, M. R. (1969). Multiplier and Gradient Methods. J. Optim. Theory Appl. 4, 303–320. doi:10.1007/bf00927673
Huang, G., Nammour, R., and Symes, W. (2017). Full-waveform Inversion via Source-Receiver Extension. Geophysics 82, R153–R171. doi:10.1190/geo2016-0301.1
Jin, S., and Plessix, R.-É. (2013). “Stack-based Full Wavefield Velocity Tomography,” in 83rd Annual International Meeting, SEG Technical Program Expanded Abstracts 2013, Houston, 1095–1099. doi:10.1190/segam2013-1027.1
Julian, B. R., Miller, A. D., and Foulger, G. R. (1998). Non-double-couple Earthquakes 1. Theory. Rev. Geophys. 36, 525–549. doi:10.1029/98rg00716
Kaderli, J., McChesney, M. D., and Minkoff, S. E. (2015). “Microseismic Event Estimation in Noisy Data via Full Waveform Inversion,” in 85th Annual International Meeting, SEG Technical Program Expanded Abstracts 2015, New Orleans, 1159–1164. doi:10.1190/segam2015-5867154.1
Kawakatsu, H., and Montagner, J.-P. (2008). Time-reversal Seismic-Source Imaging and Moment-Tensor Inversion. Geophys. J. Int. 175, 686–688. doi:10.1111/j.1365-246x.2008.03926.x
Kim, Y., Liu, Q., and Tromp, J. (2011). Adjoint Centroid-Moment Tensor Inversions. Geophys. J. Int. 186, 264–278. doi:10.1111/j.1365-246x.2011.05027.x
Kissling, E., Kradolfer, U., and Maurer, H. (1995). Program VELEST User’s Guide-Short Introduction. ETH Zurich: Institute of Geophysics.
Kriegerowski, M., Petersen, G. M., Vasyura‐Bathke, H., and Ohrnberger, M. (2019). A Deep Convolutional Neural Network for Localization of Clustered Earthquakes Based on Multistation Full Waveforms. Seismol. Res. Lett. 90, 510–516. doi:10.1785/0220180320
Kuang, W., Yuan, C., and Zhang, J. (2021). Real-time Determination of Earthquake Focal Mechanism via Deep Learning. Nat. Commun. 12, 1–8. doi:10.1038/s41467-021-21670-x
Lanz, E., Maurer, H., and Green, A. G. (1998). Refraction Tomography over a Buried Waste Disposal Site. Geophysics 63, 1414–1433. doi:10.1190/1.1444443
Larmat, C., Montagner, J. P., Fink, M., Capdeville, Y., Tourin, A., and Clévédé, E. (2006). Time‐reversal Imaging of Seismic Sources and Application to the Great Sumatra Earthquake. Geophys. Res. Lett. 33, 26336. doi:10.1029/2006GL026336
Lee, K. H., and Kim, H. J. (2003). Source‐independent Full‐waveform Inversion of Seismic Data. Geophysics 68, 2010–2015. doi:10.1190/1.1635054
Lellouch, A., and Landa, E. (2018). Seismic Velocity Estimation Using Time-Reversal Focusing. Geophysics 83 (4), U43–U50. doi:10.1190/geo2017-0569.1
Li, J., Zhang, H., Sadi Kuleli, H., and Nafi Toksoz, M. (2011). Focal Mechanism Determination Using High-Frequency Waveform Matching and its Application to Small Magnitude Induced Earthquakes. Geophys. J. Int. 184, 1261–1274. doi:10.1111/j.1365-246x.2010.04903.x
Li, Y., and Alkhalifah, T. (2021). Extended Full Waveform Inversion with Matching Filter. Geophys. Prospect. 69 (7), 1441–1454. doi:10.1111/1365-2478.13121
Lomax, A., Virieux, J., Volant, P., and Berge-Thierry, C. (2000). “Probabilistic Earthquake Location in 3D and Layered Models,” in Advances in Seismic Event Location. Editors C. H. Thurber, and N. Rabinowitz (Amsterdam: Kluwer), 101–134. doi:10.1007/978-94-015-9536-0_5
Luo, J., and Wu, R.-S. (2015). Seismic Envelope Inversion: Reduction of Local Minima and Noise Resistance. Geophys. Prospect. 63, 597–614. doi:10.1111/1365-2478.12208
Luo, S., and Sava, P. (2011). “A Deconvolution-Based Objective Function for Wave-Equation Inversion,” in 81st Annual International Meeting, SEG Technical Program Expanded Abstracts 2011, San Antonio, 2788–2792. doi:10.1190/1.3627773
Luo, Y., and Schuster, G. T. (1991). Wave‐equation Traveltime Inversion. Geophysics 56, 645–653. doi:10.1190/1.1443081
Lyu, B., and Nakata, N. (2020). Iterative Passive-Source Location Estimation and Velocity Inversion Using Geometric-Mean Reverse-Time Migration and Full-Waveform Inversion. Geophys. J. Int. 223, 1935–1947. doi:10.1093/gji/ggaa428
Martin, G. S., Marfurt, K. J., and Larsen, S. (2002). “Marmousi-2: An Updated Model for the Investigation of AVO in Structurally Complex Areas,” in SEG International Exposition and 72nd Annual International Meeting, SEG Technical Program Expanded Abstracts 2002, Salt lake City, UT.
McMechan, G. A. (1982). Determination of Source Parameters by Wavefield Extrapolation. Geophys. J. Int. 71, 613–628. doi:10.1111/j.1365-246x.1982.tb02788.x
Métivier, L., Brossier, R., Merigot, Q., Oudet, É., and Virieux, J. (2016). An Optimal Transport Approach for Seismic Tomography: Application to 3D Full Waveform Inversion. Inverse Probl. 32, 115008. doi:10.1088/0266-5611/32/11/115008
Mora, P. (1987). Nonlinear Two‐dimensional Elastic Inversion of Multioffset Seismic Data. Geophysics 52, 1211–1228. doi:10.1190/1.1442384
Nakata, N., and Beroza, G. C. (2016). Reverse Time Migration for Microseismic Sources Using the Geometric Mean as an Imaging Condition. Geophysics 81, KS51–KS60. doi:10.1190/geo2015-0278.1
Oh, J.-W., and Alkhalifah, T. (2018). Full Waveform Inversion Using Envelope-Based Global Correlation Norm. Geophys. J. Int. 213, 815–823. doi:10.1093/gji/ggy031
Operto, S., Miniussi, A., Brossier, R., Combe, L., Métivier, L., Monteiller, V., et al. (2015). Efficient 3-D Frequency-Domain Mono-Parameter Full-Waveform Inversion of Ocean-Bottom Cable Data: Application to Valhall in the Visco-Acoustic Vertical Transverse Isotropic Approximation. Geophys. J. Int. 202, 1362–1391. doi:10.1093/gji/ggv226
Oren, C., and Shragge, J. (2022). Passive-seismic Image-Domain Elastic Wavefield Tomography. Geophys. J. Int. 228 (3), 1512–1529. doi:10.1093/gji/ggab415
Oren, C., and Shragge, J. (2021). PS Energy Imaging Condition for Microseismic Data - Part 1: Theory and Applications in 3D Isotropic Media. Geophysics 86 (2), KS37–KS48. doi:10.1190/geo2020-0476.1
Plessix, R.-E. (2006). A Review of the Adjoint-State Method for Computing the Gradient of a Functional with Geophysical Applications. Geophys. J. Int. 167, 495–503. doi:10.1111/j.1365-246x.2006.02978.x
Pratt, R. G. (1999). Seismic Waveform Inversion in the Frequency Domain, Part 1: Theory and Verification in a Physical Scale Model. Geophysics 64, 888–901. doi:10.1190/1.1444597
Pratt, R. G., and Worthington, M. H. (1990). Inverse Theory Applied to Multi-Source Cross-Hole Tomography. Part 1: Acoustic Wave-Equation Method1. Geophys. Prospect 38, 287–310. doi:10.1111/j.1365-2478.1990.tb01846.x
Rau, R.-J., Wu, F. T., and Shin, T.-C. (1996). Regional Network Focal Mechanism Determination Using 3D Velocity Model and SH/P Amplitude Ratio. Bull. Seismol. Soc. Am. 86, 1270–1283.
Ravaut, C., Operto, S., Improta, L., Virieux, J., Herrero, A., and Dell'Aversana, P. (2004). Multiscale Imaging of Complex Structures from Multifold Wide-Aperture Seismic Data by Frequency-Domain Full-Waveform Tomography: Application to a Thrust Belt. Geophys. J. Int. 159, 1032–1056. doi:10.1111/j.1365-246x.2004.02442.x
Rawlinson, N., and Sambridge, M. (2003). Seismic Traveltime Tomography of the Crust and Lithosphere. Adv. Geophys. 46, 81–198. doi:10.1016/s0065-2687(03)46002-0
Rocha, D., Sava, P., Shragge, J., and Witten, B. (2019). 3D Passive Wavefield Imaging Using the Energy Norm. Geophysics 84 (2), KS13–KS27. doi:10.1190/geo2018-0251.1
Ross, Z. E., Meier, M. A., and Hauksson, E. (2018). P Wave Arrival Picking and First‐Motion Polarity Determination with Deep Learning. J. Geophys. Res. Solid Earth 123, 5120–5129. doi:10.1029/2017jb015251
Sava, P. (2011). Micro-earthquake Monitoring with Sparsely Sampled Data. J. Pet. Explor Prod. Technol. 1, 43–49. doi:10.1007/s13202-011-0005-7
Schuster, G. T. (2017). Seismic Inversion. Society of Exploration Geophysicists (SEFG). Available at: https://csim.kaust.edu.sa/files/ErSE328.2013/LAB/Chapter.FWIa/index.html.
Shin, C., and Cha, Y. H. (2009). Waveform Inversion in the Laplace-Fourier Domain. Geophys. J. Int. 177, 1067–1079. doi:10.1111/j.1365-246x.2009.04102.x
Shin, C., and Cha, Y. H. (2008). Waveform Inversion in the Laplace Domain. Geophys. J. Int. 173, 922–931. doi:10.1111/j.1365-246x.2008.03768.x
Sirgue, L., and Pratt, R. G. (2004). Efficient Waveform Inversion and Imaging: A Strategy for Selecting Temporal Frequencies. Geophysics 69, 231–248. doi:10.1190/1.1649391
Smith, J. D., Ross, Z. E., Azizzadenesheli, K., and Muir, J. B. (2022). HypoSVI: Hypocenter Inversion with Stein Variational Inference and Physics Informed Neural Networks. Geophys. J. Int. 228, 698–710. doi:10.1093/gji/ggab309
Song, C., and Alkhalifah, T. (2019). Microseismic Event Estimation Based on an Efficient Wavefield Inversion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 12, 4664–4671. doi:10.1109/jstars.2019.2946903
Song, C., Alkhalifah, T., and Wu, Z. (2019b). Microseismic Event Estimation and Velocity Analysis Based on a Source-Focusing Function. Geophysics 84 (3), KS85–KS94. doi:10.1190/geo2018-0205.1
Song, C., Wu, Z., and Alkhalifah, T. (2019a). Passive Seismic Event Estimation Using Multi-Scattering Waveform Inversion. Geophysics 84, KS59–KS69. doi:10.1190/geo2018-0358.1
Stanek, F., and Eisner, L. (2013). “New Model Explaining Inverted Source Mechanisms of Microseismic Events Induced by Hydraulic Fracturing,” in 83rd Annual International Meeting, SEG Technical Program Expanded Abstracts 2013, Houston, 2201–2205. doi:10.1190/segam2013-0554.1
Steinberg, A., Vasyura‐Bathke, H., Gaebler, P., Ohrnberger, M., and Ceranna, L. (2021). Estimation of Seismic Moment Tensors Using Variational Inference Machine Learning. J. Geophys. Res. Solid Earth 126, e2021JB022685. doi:10.1029/2021jb022685
Sun, B., and Alkhalifah, T. (2019). A Robust Waveform Inversion Using a Global Comparison of Modeled and Observed Data. Lead. Edge 38 (3), 185–192. doi:10.1190/tle38030185.1
Sun, J., Xue, Z., Formel, S., Zhu, T. Y., and Nakata, N. (2016). “Full Waveform Inversion of Passive Seismic Data for Sources and Velocities: 86th Annual International Meeting,” in SEG International Exposition and 86th Annual International Meeting, SEG Technical Program Expanded Abstracts 2016, 1405–1410.
Tape, C., Liu, Q., Maggi, A., and Tromp, J. (2009). Adjoint Tomography of the Southern California Crust. Science 325, 988–992. doi:10.1126/science.1175298
Tape, C., Liu, Q., Maggi, A., and Tromp, J. (2010). Seismic Tomography of the Southern California Crust Based on Spectral-Element and Adjoint Methods. Geophys. J. Int. 180, 433–462. doi:10.1111/j.1365-246x.2009.04429.x
Tarantola, A. (1984). Inversion of Seismic Reflection Data in the Acoustic Approximation. Geophysics 49, 1259–1266. doi:10.1190/1.1441754
Thurber, C. H. (1992). Hypocenter-velocity Structure Coupling in Local Earthquake Tomography. Phys. Earth Planet. Interiors 75, 55–62. doi:10.1016/0031-9201(92)90117-e
Uchide, T. (2020). Focal Mechanisms of Small Earthquakes beneath the Japanese Islands Based on First-Motion Polarities Picked Using Deep Learning. Geophys. J. Int. 223, 1658–1671. doi:10.1093/gji/ggaa401
van den Ende, M. P., and Ampuero, J. P. (2020). Automated Seismic Source Characterization Using Deep Graph Neural Networks. Geophys. Res. Lett. 47, e2020GL088690. doi:10.1029/2020gl088690
Van Leeuwen, T., and Herrmann, F. J. (2013). Mitigating Local Minima in Full-Waveform Inversion by Expanding the Search Space. Geophys. J. Int. 195, 661–667. doi:10.1093/gji/ggt258
Van Leeuwen, T., and Mulder, W. A. (2010). A Correlation-Based Misfit Criterion for Wave-Equation Traveltime Tomography. Geophys. J. Int. 182, 1383–1394. doi:10.1111/j.1365-246x.2010.04681.x
Virieux, J., and Operto, S. (2009). An Overview of Full-Waveform Inversion in Exploration Geophysics. Geophysics 74, WCC1–WCC26. doi:10.1190/1.3238367
Waldhauser, F., and Ellsworth, W. L. (2000). A Double-Difference Earthquake Location Algorithm: Method and Application to the Northern Hayward Fault, California. Bull. Seismol. Soc. Am. 90, 1353–1368. doi:10.1785/0120000006
Wang, C., Yingst, D., Farmer, P., and Leveille, J. (2016). “Full-waveform Inversion with the Reconstructed Wavefield Method,” in SEG International Exposition and 86th Annual International Meeting, SEG Technical Program Expanded Abstracts 2016, 1237–1241. doi:10.1190/segam2016-13870317.1
Wang, H., and Alkhalifah, T. (2021). Direct Microseismic Event Location and Characterization from Passive Seismic Data Using Convolutional Neural Networks. Geophysics 86, KS109–KS121. doi:10.1190/geo2020-0636.1
Wang, H., and Alkhalifah, T. (2018). Microseismic Imaging Using a Source Function Independent Full Waveform Inversion Method. Geophys. J. Int. 214, 46–57. doi:10.1093/gji/ggy121
Wang, H., Guo, Q., Alkhalifah, T., and Wu, Z. (2020). Regularized Elastic Passive Equivalent Source Inversion with Full-Waveform Inversion: Application to a Field Monitoring Microseismic Data Set. Geophysics 85 (6), KS207–KS219. doi:10.1190/geo2019-0738.1
Warner, M., and Guasch, L. (2016). Adaptive Waveform Inversion: Theory. Geophysics 81, R429–R445. doi:10.1190/geo2015-0387.1
Warner, M., Ratcliffe, A., Nangoo, T., Morgan, J., Umpleby, A., Shah, N., et al. (2013). Anisotropic 3D Full-Waveform Inversion. Geophysics 78, R59–R80. doi:10.1190/geo2012-0338.1
Willacy, C., van Dedem, E., Minisini, S., Li, J., Blokland, J.-W., Das, I., et al. (2019). Full-waveform Event Location and Moment Tensor Inversion for Induced Seismicity. Geophysics 84, KS39–KS57. doi:10.1190/geo2018-0212.1
Witten, B., and Shragge, J. (2017). Image-domain Velocity Inversion and Event Location for Microseismic Monitoring. Geophysics 82 (5), KS71–KS83. doi:10.1190/geo2016-0561.1
Wu, R.-S., Luo, J., and Wu, B. (2014). Seismic Envelope Inversion and Modulation Signal Model. Geophysics 79, WA13–WA24. doi:10.1190/geo2013-0294.1
Xu, K., Greenhalgh, S. A., and Wang, M. (2006). Comparison of Source-independent Methods of Elastic Waveform Inversion. Geophysics 71, R91–R100. doi:10.1190/1.2356256
Yang, T., and Sava, P. (2013). “3D Image-Domain Wavefield Tomography Using Time-Lag Extended Images,” in 83rd Annual International Meeting, SEG Technical Program Expanded Abstracts 2013, Houston, 4816–4821. doi:10.1190/segam2013-0279.1
Yang, Y., and Engquist, B. (2018). Analysis of Optimal Transport and Related Misfit Functions in Full-Waveform Inversion. Geophysics 83, A7–A12. doi:10.1190/geo2017-0264.1
Zhang, H., and Thurber, C. H. (2003). Double-difference Tomography: The Method and its Application to the Hayward Fault, California. Bull. Seismol. Soc. Am. 93, 1875–1889. doi:10.1785/0120020190
Zhang, X., Zhang, J., Yuan, C., Liu, S., Chen, Z., and Li, W. (2020). Locating Induced Earthquakes with a Network of Seismic Stations in Oklahoma via a Deep Learning Method. Sci. Rep. 10, 1–12. doi:10.1038/s41598-020-58908-5
Zhang, Y., and Wang, D. (2009). Traveltime Information-Based Wave-Equation Inversion. Geophysics 74, WCC27–WCC36. doi:10.1190/1.3243073
Zhong, Y., and Liu, Y. (2019). Time-domain Acoustic Full-Waveform Inversion Based on Dual-Sensor Seismic Acquisition System. J. SEISMIC Explor. 28, 103–120.
Keywords: waveform tomography, passive seismic sources, energy focusing, seismic moment tensor, time-reversal method
Citation: Hu Y, Li J and Zhang H (2022) Waveform Energy Focusing Tomography With Passive Seismic Sources. Front. Earth Sci. 10:900435. doi: 10.3389/feart.2022.900435
Received: 20 March 2022; Accepted: 09 May 2022;
Published: 13 June 2022.
Edited by:
Tariq Alkhalifah, King Abdullah University of Science and Technology, Saudi ArabiaReviewed by:
Hanchen Wang, Los Alamos National Laboratory (DOE), United StatesCopyright © 2022 Hu, Li and Zhang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Junlun Li, bGlqdW5sdW5AdXN0Yy5lZHUuY24=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.