 Shahin Tasoujian
Shahin Tasoujian Karolos Grigoriadis
Karolos Grigoriadis - Mechanical Engineering Department, University of Houston, Houston, TX, United States
The present work examines the delay-dependent gain-scheduling feedback control with guaranteed closed-loop stability and induced
1 Introduction
Linear parameter-varying (LPV) systems are linear dynamical systems whose dynamic characteristics depend on a time-varying measurable scheduling parameter vector. In this context of the LPV systems framework, the scheduling parameter vector captures the dynamics of nonlinear or time-varying systems in a systematic fashion (Briat, 2014) and has found applications in flight control (Lu et al., 2006), automotive systems (Tasoujian et al., 2016; Salavati et al., 2019), energy (Bianchi et al., 2005), and biomedical systems (Colmegna et al., 2015; Tasoujian et al., 2019b). Traditional gain-scheduling controllers are designed by interpolation of separately designed controllers for the system’s operation points. Such design methods suffer from implementation difficulties and lack of closed-loop stability and performance guarantees (Shamma and Athans, 1990; Bianchi et al., 2006). In order to tackle these challenges, the LPV gain-scheduling control approach was introduced to provide a direct, efficient, simple-to-implement, and systematic design process to meet closed-loop stability and performance of nonlinear and time-varying systems (Shamma, 1988).
Time-delay is ubiquitously encountered in numerous engineering systems, such as automotive systems (Tasoujian et al., 2016), biomedical systems (Tasoujian et al., 2019b), network control systems (Witrant et al., 2007), and manufacturing and chemical processes (Bozorg and Davison, 2006). In the context of feedback systems, time-delay or dead-time refers to the time that takes for the closed-loop system to receive the control input, to make the control decision, and to generate the control action (Fridman, 2014). In control systems, time-delay is a source of instability and performance degradation. Time-delay induces a phase lag which generates oscillatory behavior, diminishes the stability margin of a control system, and limits the achievable bandwidth (Albertos, 2006). Time delay systems cannot be treated properly using conventional control design methods, such as Laplace domain-based methods since the corresponding transfer function of the time-delay system is not rational. In this regard, stability analysis and control design of time-delay systems have been formulated into two main directions, namely, delay-independent and delay-dependent approaches (Fridman, 2014). Unlike the former direction, delay-dependent techniques take the size of the delay into consideration and result in less conservative results. Generally, in delay-dependent methods, Lyapunov theory is extended to either the Krasovskii method of Lyapunov functionals (Kharitonov, 2004) or Razumnikhin theory of Lyapunov functions (Jankovic, 2001). The former direction relies on using Lyapunov-Krasovskii functionals (LKFs) for accounting for the infinite-dimensionality of the system state in the time-delay systems and usually leads to less conservative results.
In time-delay systems analysis, frequency domain approaches are limited to systems with constant delays (Niculescu, 2001; Michiels and Niculescu, 2007). On the other hand, time-domain techniques utilizing LKFs have gained significant attention, primarily because of their potential in addressing the stability analysis and control synthesis of systems with varying time-delays. In the Lyapunov-Krasovskii method, the prominent sources of conservatism are rooted in choosing the LKF, the use of model transformations, such as Newton-Leibniz (Kolmanovskii and Richard, 1999) and Padé approximations (Knospe and Roozbehani, 2006), and the use of bounding techniques for constraining the quadratic integral terms of the form
In many practical engineering systems the time-delay is varying and parameter dependent. In (Niculescu, 1999), the air fuel ratio control problem in internal combustion engines is examined using an LPV approach, where the measurement delay from the sensor downstream the catalyst is a function of the engine speed. A Padé approximation was used to obtain a rational approximation of the variable delay. The authors in (Niculescu, 1999) used an LKF with the parametrized Newton-Leibniz model transformation to obtain sufficient conditions for the stability of time-delay systems. In (Park, 1999), the same type of LKF, together with Park’s inequality, was employed for bounding the cross-terms. Although this bounding method has helped to better address the bounding of cross-terms and hence reducing the conservatism, it still suffers from the use of model transformations that has inherent conservatism. The authors in (Zhang et al., 2002) proposed a parameter-dependent LKF along with Jensen’s inequality for the integral term bounding, to derive delay-dependent
In the present work, we consider an improved parameter-dependent LKF candidate and the affine Jensen’s inequality (Briat, 2011) is employed for bounding the integral terms that appears in the LKF derivative. The utilized affine Jensen’s inequality bounding technique considers intermediary values of delay instead of just assuming the worst-case delay value. These choices of LKF and bounding method, and avoiding model transformations enables the derivation of less conservative conditions for the synthesis of delay-dependent dynamic output-feedback controllers for the LPV time-delay systems with large and fast-varying time delays. The proposed control guarantees closed-loop stability and a specified performance level of induced
Mean arterial blood pressure (MAP) control and regulation via the administration of vasopressor drugs is essential in hypotensive critical emergency-care situations, such as, resuscitation of patients with severe hemorrhage, septic shock, maternal cesarean hypotension treatment, and traumatic brain injury, during which the human physiology fails to maintain homeostasis and to regulate the blood pressure to its normal limits (Kee et al., 2005). Vasopressor medications, such as phenylephrine (PHP), epinephrine, and norepinephrine, are administered to elevate blood pressure by stimulating the depressed cardiovascular system and causing vasoconstriction (Neves et al., 2010). The precise dosage of the administered vasopressor drug is essential to accomplish fast resuscitation and reliable MAP recovery, and therefore, sustain perfusions of vital organs without overdosing. Traditional drug administration methods are performed using a syringe or infusion pump with manual titration. Such MAP regulation approaches are time-consuming, labor-intensive and inaccurate, and can lead to under- or over-resuscitation with undesirable or potentially fatal consequences, such as cardiac arrest. Automated and computer-aided drug administration via feedback control strategies has been investigated to overcome the challenges of manual drug delivery and operator monitoring. Various feedback control paradigms have been used for the automated closed-loop blood pressure regulation in emergency care (Malagutti et al., 2013; Ahmed and Özbay, 2016; Sandu and Popescu, 2016; Tasoujian et al., 2019b; Urooj and Singh, 2019). In the present work we consider an LPV time-delay model to represent the MAP response to PHP drug infusion dynamics, as a benchmark example to evaluate the proposed delay-dependent LPV control design method for MAP regulation. Closed-loop simulations using a patient simulation model demonstrate the superiority and effectiveness of the proposed LPV control to achieve desired MAP reference tracking, transient response performance, disturbance rejection and noise attenuation.
The notation used in the paper is as follows.
In the present work, we will take advantage of the following lemma, which plays a central role in deriving the proposed results for the delay-dependent LPV time-delay control design framework.
Lemma 1:(Affine Jensen’s inequality) (Briat, 2011): Given a matrix
holds for all
The rest of paper is organized as follows. Section 4 introduces the problem statement and the general LPV time-delay system representation. Design objectives, as well as the proposed delay-dependent LPV control synthesis is presented in Section 5. Section 6 provides a numerical example to assess the capability of the proposed method in reducing the conservatism compared to a prior work. In Section 7, an LPV formulation of the MAP response to a vasoactive drug infusion is introduced as a case study. Subsequently, the closed-loop validation study of the proposed control design method is demonstrated in a simulation environment and compared to prior control designs in the literature. Concluding remarks and future research directions are provided in Section 8.
2 LPV Time-Delay Systems
Consider a general time-delayed LPV system with the state-space representation
where
where ns is the number of parameters and
In the next section, we investigate the stability and
3 Output-Feedback LPV Control Design for Time-Delay Systems
A gain-scheduled dynamic LPV controller is considered to accomplish the following design objectives:
• Asymptotic stability of the LPV system (3) in the presence of parameter and delay variations,
• Minimization of the worst case amplification of the controlled output, z, to a disturbance signal, w, with bounded energy. That is, solution of the upper-bound minimization problem of induced
However, instead of the optimal objective (6) we are interested in the upper bound suboptimal problem
where γ is a positive scalar.
A full-order dynamic output-feedback LPV controller is considered in the following form
where
where
and the dependence on the scheduling parameter has been dropped for brevity.
3.1 Closed-Loop Stability and Induced
In order to achieve less conservative control synthesis results for time-delay LPV systems, we take advantage of the Lyapunov-Krasovskii approach by employing a new extended-state based quadratic LKF candidate with modified integral terms, which depend explicitly on the time delay. The utilized approach avoids a model transformation; hence, it leads to further conservatism reduction. Additionally, the affine Jensen’s inequality is used to bound the LKF derivative’s cross-terms. In order to derive tractable LMI-based results, other conservative bounding approaches, such as the rational Jensen’s inequality, consider the worst-case time-delay value to upper-bound the rational term. On the other hand, this paper’s utilized inequality is affine with respect to the time-delay (hence convex), so it provides a tighter bound of the integral terms of the LKF derivative by taking all the possible intermediate time-delay values into account. The following theorem provides sufficient conditions for the synthesis of a delayed dynamic output-feedback LPV controller to meet the control design objectives, namely, closed-loop asymptotic stability and a specified level of disturbance attenuation performance Eq. 7 for the closed-loop system Eq. 9.
Theorem 1. There exists an output-feedback LPV controller of the formEq. 8to asymptotically stabilize the LPV systemEq. 3and satisfy the induced
Is feasible and in the given LMI Eq. 11
Remark 1:Due to the affine presence of the derivative of the scheduling parameter, we may replace
Proof. The proof relies on employing an LKF candidate of the form
with
The notation
where
The affine Jensen’s inequality (introduced in Lemma 1) can now be used to bound the derivative terms with the negative integral cross term. This direct bounding technique enables us to provide a delayed-scheduled tight upper bound on the time derivative of the LKF and therefore obtain less conservative results. In this context, the third derivative term is bounded as follows
where by considering the affine Jensen’s inequality (1), we choose the function
and
where we choose
By considering the derivative of the utilized LKF Eq. 14 and adding the terms
where the augmented state vector ζ(t) is defined as:
with
where
The slack variables in relation Eq. 18 are chosen as
3.2 Output-Feedback LPV Gain-Scheduled Controller Synthesis
Utilizing the LMI decision variables X, Y,
3.2.1 Determine
where the obtained
3.2.2 Compute the Following Parameter Matrices
3.2.3 Finally, the Controller Matrices Are Computed in the Following Order
4 Numerical Example
A numerical example is examined to assess the performance and the conservatism reduction capability of the proposed control design methodology compared to previous work in the literature. We consider an LPV state-delayed system with the following state-space representation (Zope et al., 2012)
where ρ(t) = sin(t) is the LPV system scheduling parameter,
Based on the results of Theorem 1, an output-feedback controller of the form Eq. 8 is designed to minimize the induced
The condition in Theorem 1 leads to an infinite-dimensional convex optimization problem with an infinite number of LMI constraints. To tackle this issue, we take advantage of the gridding approach to convert the infinite-dimensional problem to a finite-dimensional convex optimization problem (Apkarian and Adams, 1998). In this regard, a quadratic parameter dependence is adopted for the parameter dependent matrices as follows:
In the considered numerical example Eq. 26, the weighting scalars are chosen as ϕ = 1, ξ = 10, and ψ = 1. The time delay is considered to be τ(t) = 3|sin (0.3t)| (i.e.
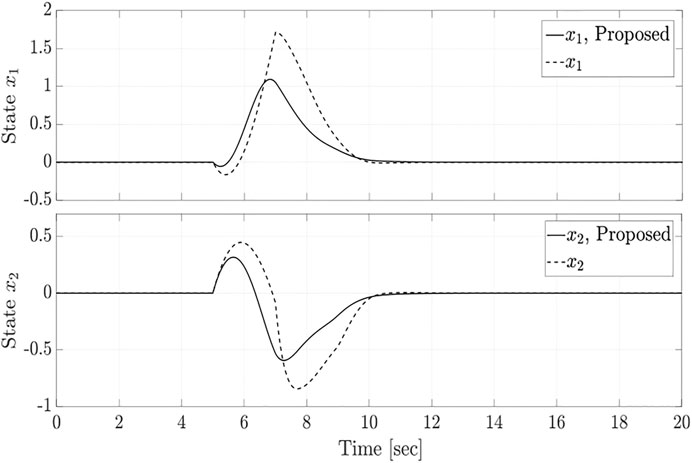
FIGURE 1. Closed-loop response of system states x1, and x2 subject to disturbance.
Table 1 compares the obtained performance level γ for both control design methods and for different maximum delay values,

TABLE 1. Performance levels γ of both methods for different time-delay maximum values
5 LPV Control Design for MAP Regulation in Hypotensive Patients
5.1 MAP Response Dynamics
To assess the capability of the proposed LPV control, we consider the problem of automated MAP regulation in critical hypotensive patients using vasoactive drug infusion. The following model is utilized to characterize the MAP response dynamics subject to PHP drug infusion (Luspay and Grigoriadis, 2015; Sandu and Popescu, 2016; Tasoujian et al., 2020a; Cao and Grigoriadis, 2020)
where ΔMAP(t) denotes the MAP variations in mmHg from its baseline value, i.e. ΔMAP(t) = MAP(t) − MAPb(t), u(t) is the drug infusion rate in ml/h, K(t) is the patient’s sensitivity to the drug, T(t) is the lag time representing the uptake, distribution, and biotransformation of the drug (Isaka and Sebald, 1993), and τ(t) represents the time delay for the drug to reach the circulatory system from the infusion pump. Figure 2 shows an experimental MAP response to a step PHP infusion versus a matched simulated response of Eq. 27. The experimental data shown correspond to a swine experiment performed at the Resuscitation Research Laboratory at the University of Texas Medical Branch (UTMB), Galveston, Texas (Luspay and Grigoriadis, 2015). The figure also shows the interpretation of the model parameters K(t), T(t), τ(t), MAPb(t) obtained using a least-squares optimization method to fit the actual MAP response.
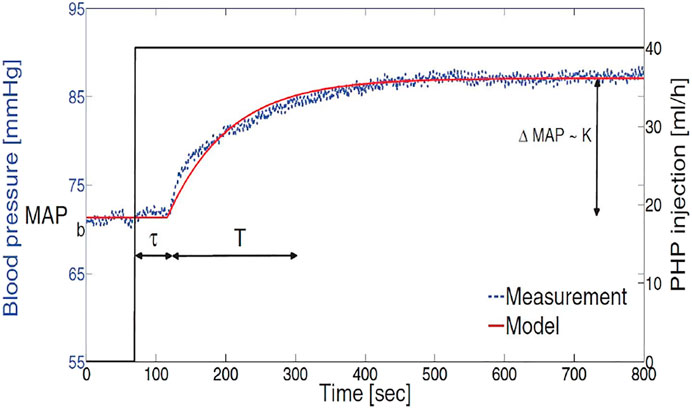
FIGURE 2. Closed-loop MAP response and control effort (PHP injection rate) of LPV controller against fixed structure PI controller for disturbance and noise free case.
It is noted that due to the patient’s physiological response variability, the model parameters and the delay could vary significantly from patient-to-patient (inter-patient variability), as well as, for a given patient over time (intra-patient variability) (Isaka and Sebald, 1993; Rao et al., 2003). Based on clinical observations (Tasoujian et al., 2019b), the model parameter variations can be approximated for simulation purposes as nonlinear functions of the drug injection rate as follows.
where ak, k0, k1, bT, aτ,2, aτ,1, and bτ,1 are uniformly distributed random coefficients given in Table 2 and
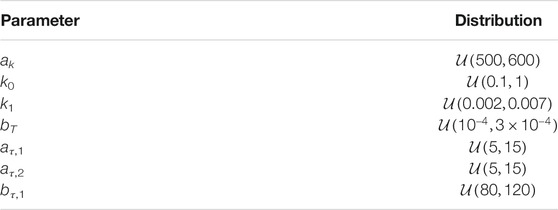
TABLE 2. Probabilistic distributions of the nonlinear patient coefficients in (28).
5.2 MAP Response LPV Modeling
To design the proposed delay-dependent LPV control synthesis for the MAP regulation problem, we first formulate the MAP response dynamics Eq. 27 into an LPV time-delay model representation. Considering the state variable as x(t) = ΔMAP(t), the state space representation of the MAP response model is rewritten as follows
where y(t) is the patient’s measured MAP response and do(t) denotes output disturbances. In Eq. 29, the varying time delay, τ(t), is appearing in the input signal. In order to utilize the proposed time-delay LPV system control design framework, we transform the input delay system into a state-delay LPV representation. To this end, we introduce a low-pass input dynamics as follows
where Ω and Λ are positive scalars that are selected based on the bandwidth of the actuators. Then, the state-space state-delay LPV representation of the MAP response dynamics takes the following form
where
The scheduling parameters K(t), T(t), and τ(t) are assumed to be estimated in real-time. In a practical scenario, a Bayesian-based square-root cubature Kalman filtering algorithm can be used to estimate the scheduling parameters (Tasoujian et al., 2020b).
5.3 Closed-Loop MAP Control Simulation Results
In the MAP dynamics LPV model Eq. 31, the performance controlled output vector is defined as
For comparison purposes, we also evaluate the proposed controller performance against a fixed structure PI controller, see (Wassar et al., 2014), in an hour-long simulation scenario with a piecewise constant commanded reference MAP. Given the following nominal values of the model parameters and time-delay,
which is calculated based on the prescribed gain and phase margin control design constraints (Zhong, 2006). In the absence of disturbances and measurement noise, the MAP reference tracking profile and the control effort are shown in Figure 3, where the objective is to regulate the MAP response to track the commanded MAP with minimum overshoot, rise time, settling time, and zero steady-state error. According to these results, the closed-loop response overshoot remains within the acceptable range, and the delay-dependent LPV controller provides faster response with a smaller settling time compared to the conventional PI controller.
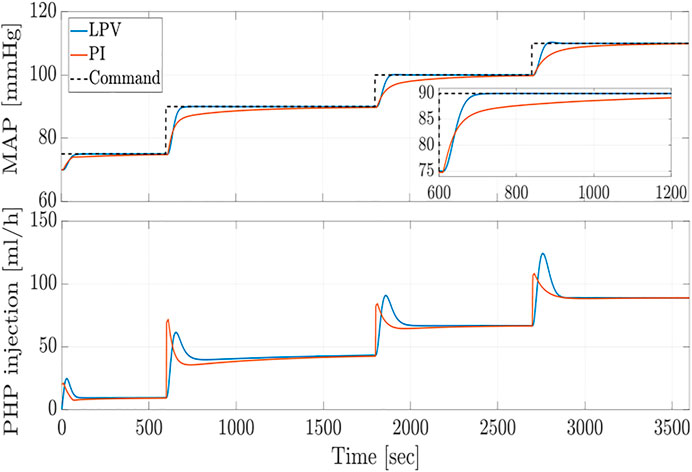
FIGURE 3. Typical MAP response due to step vasopressor drug infusion.
Subsequently, we assume that the closed-loop system is subject to measurement noise and output disturbances. These disturbances could result from medical interventions and physiological response variations due to hemorrhage or other administered medications like lactated ringers. Figure 4 shows a typical profile of such disturbances. Figure 5 depicts the performance of the LPV and PI controllers, where the measurement noise is a white noise signal with intensity of 10–3. As expected, the proposed LPV controller outperforms the fixed structure PI controller with respect to the response’s rise time and speed due to its scheduling structure. The results demonstrate that the proposed time-delay LPV gain-scheduling control methodology provides desirable closed-loop performance in terms of commanded MAP tracking and disturbance rejection in the presence of model parameter variations, varying time-delay, and output disturbances.
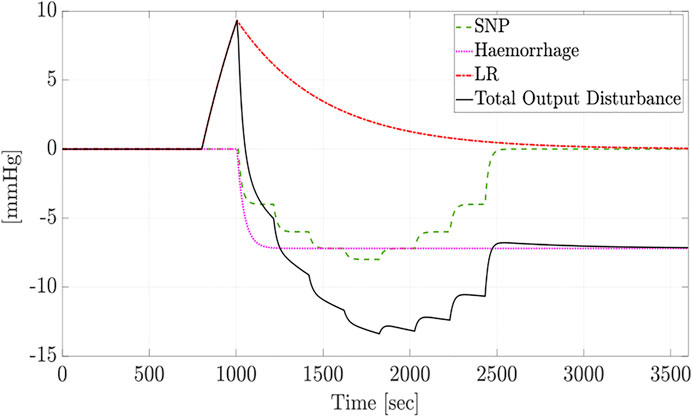
FIGURE 4. Profile of output disturbances.
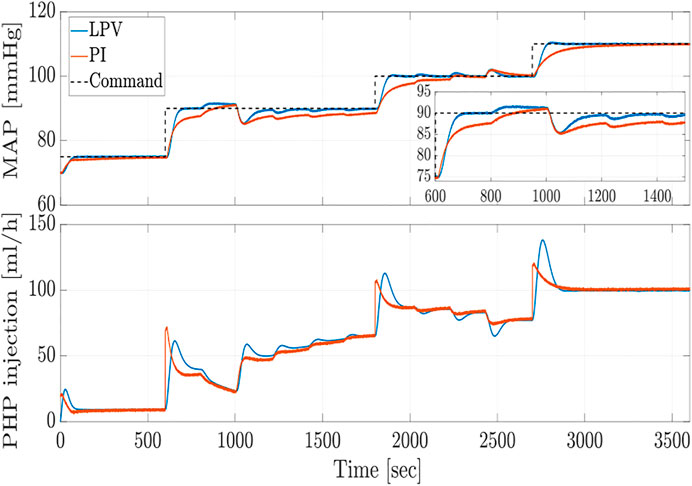
FIGURE 5. Closed-loop MAP response and control effort (PHP injection rate) of LPV controller against fixed structure PI controller subject to disturbance and measurement noise.
6 Conclusion
In the present study, a Lyapunov-Krasovskii based approach has been used to derive delay-dependent LPV control synthesis conditions for LPV time-delay systems. In this regard, an improved parameter-dependent Lyapunov Krasovskii functional (LKF) candidate was proposed, followed by an efficient bounding technique using the affine Jensen’s inequality, for the design of output-feedback LPV controllers. This choices of LKF and integral inequality constraints reduced the conservatism of the method by limiting the bounding gap in the integral cross-terms of the LKF derivative. By introducing appropriate slack variables, the final relaxed synthesis conditions have been formulated in terms of tractable convex linear matrix inequalities (LMIs). A numerical example compared the performance of the proposed scheme to past work in the literature. It is shown that the proposed delay-dependent LPV control that utilizes an improved LKF formulation and a more general Jensen’s inequality results in less conservative design and larger values of allowable delay. Finally, the mean arterial blood pressure (MAP) regulation in critical hypotensive patients was examined to evaluate the proposed control design in a challenging practical control problem. Closed-loop simulation results demonstrated the ability of the proposed time-delayed LPV control to regulate MAP in the presence of varying input delays and disturbances in comparison with past results in the literature. In the present work, the time-varying delay is considered to be a known quantity that can be estimated or evaluated in real time. Future work will investigate the stability analysis and robust control design for LPV systems with uncertain time-varying delays. Additionally, the effect of saturation constraints on the magnitude of the control input will be examined.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Ethics Statement
The animal study was reviewed and approved by the UTMB Galveston, TX, United States.
Author Contributions
The present research article is the result of ST’s work as a Ph.D. student under KG and MF. The detailed responsibilities are as follows: ST: Conceptualization, Methodology, Software, Validation, Formal analysis, Investigation, Writing-original draft, KG: Methodology, Writing-review, and editing, Supervision, Project administration, Funding acquisition MF: Methodology, Supervision, Project administration, Funding acquisition.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Acknowledgments
Financial support from the National Science Foundation under grant CMMI1437532 is gratefully acknowledged. The collaboration of the Resuscitation Research Laboratory at the University of Texas Medical Branch, Galveston, Texas, in providing experiment data is gratefully acknowledged.
References
Ahmed, S., and Özbay, H. (2016). Design of a Switched Robust Control Scheme for Drug Delivery in Blood Pressure Regulation. IFAC-PapersOnLine 49, 252–257. doi:10.1016/j.ifacol.2016.07.538
Albertos, P. (2006). Phase-conditionally Stable Systems. Syst. Control Lett. 55, 803–808. doi:10.1016/j.sysconle.2006.03.011
Apkarian, P., and Adams, R. J. (1998). Advanced Gain-Scheduling Techniques for Uncertain Systems. IEEE Trans. Contr. Syst. Technol. 6, 21–32. doi:10.1109/87.654874
Bei Lu, B., Fen Wu, F., and SungWan Kim, S. (2006). Switching LPV Control of an F-16 Aircraft via Controller State Reset. IEEE Trans. Contr. Syst. Technol. 14, 267–277. doi:10.1109/tcst.2005.863656
Bianchi, F. D., De Battista, H., and Mantz, R. J. (2006). Wind Turbine Control Systems: Principles, Modelling and Gain Scheduling Design. Springer Science & Business Media.
Bianchi, F. D., Mantz, R. J., and Christiansen, C. F. (2005). Gain Scheduling Control of Variable-Speed Wind Energy Conversion Systems Using Quasi-LPV Models. Control Eng. Pract. 13, 247–255. doi:10.1016/j.conengprac.2004.03.006
Bozorg, M., and Davison, E. J. (2006). Control of Time Delay Processes with Uncertain Delays: Time Delay Stability Margins. J. Process Control 16, 403–408. doi:10.1016/j.jprocont.2005.06.012
Briat, C. (2011). Convergence and Equivalence Results for the Jensen's Inequality-Application to Time-Delay and Sampled-Data Systems. IEEE Trans. Automat. Contr. 56, 1660–1665. doi:10.1109/tac.2011.2121410
Cao, G., and Grigoriadis, K. M. (2020). Blood Pressure Response Simulator to Vasopressor Drug Infusion (Pressorsim). Int. J. Control 1–15. doi:10.1080/00207179.2020.1742385
Colmegna, P. H., Sanchez-Pena, R. S., Gondhalekar, R., Dassau, E., and Doyle, F. J. (2015). Switched LPV Glucose Control in Type 1 Diabetes. IEEE Trans. Biomed. Eng. 63, 1192–1200. doi:10.1109/TBME.2015.2487043
Craig, C. R., and Stitzel, R. E. (2004). Modern Pharmacology with Clinical Applications. Baltimore, MD, USA: Lippincott Williams & Wilkins.
das Neves, J. F., Monteiro, G. A., de Almeida, J. R., Sant'Anna, R. S., Bonin, H. B., and Macedo, C. F. (2010). Phenylephrine for Blood Pressure Control in Elective Cesarean Section: Therapeutic versus Prophylactic Doses. Rev. Bras. Anestesiol. 60, 391–398. doi:10.1016/S0034-7094(10)70048-9
Isaka, S., and Sebald, A. V. (1993). Control Strategies for Arterial Blood Pressure Regulation. IEEE Trans. Biomed. Eng. 40, 353–363. doi:10.1109/10.222328
Jankovic, M. (2001). Control Lyapunov-Razumikhin Functions and Robust Stabilization of Time Delay Systems. IEEE Trans. Automat. Contr. 46, 1048–1060. doi:10.1109/9.935057
Kee, W. D. N., Khaw, K. S., and Ng, F. F. (2005). Prevention of Hypotension during Spinal Anesthesia for Cesarean Delivery. The J. Am. Soc. Anesthesiologists 103, 744–750. doi:10.1097/00000542-200510000-00012
Kharitonov, V. L. (2004). Lyapunov-Krasovskii Functionals for Scalar Time Delay Equations. Syst. Control Lett. 51, 133–149. doi:10.1016/s0167-6911(03)00221-4
Knospe, C. R., and Roozbehani, M. (2006). Stability of Linear Systems with Interval Time Delays Excluding Zero. IEEE Trans. Automat. Contr. 51, 1271–1288. doi:10.1109/tac.2006.878715
Kolmanovskii, V. B., and Richard, J.-P. (1999). Stability of Some Linear Systems with Delays. IEEE Trans. Automat. Contr. 44, 984–989. doi:10.1109/9.763213
Lofberg, J. (2004). “YALMIP: A Toolbox for Modeling and Optimization in MATLAB,” in IEEE International Conference on Robotics and Automation, 284–289.
Luspay, T., and Grigoriadis, K. M. (2015). Adaptive Parameter Estimation of Blood Pressure Dynamics Subject to Vasoactive Drug Infusion. IEEE Trans. Control Syst. Techn. 24, 779–787. doi:10.1109/tcst.2015.2476775
Malagutti, N., Dehghani, A., and Kennedy, R. A. (2013). Robust Control Design for Automatic Regulation of Blood Pressure. IET Control Theor. Appl. 7, 387–396. doi:10.1049/iet-cta.2012.0254
Michiels, W., and Niculescu, S.-I. (2007). Stability and Stabilization of Time-Delay Systems: An Eigenvalue-Based Approach. Philadelphia: SIAM.
Niculescu, S.-I. (1999). “A Model Transformation Class for Delay-dependent Stability Analysis,” in American Control Conference, San Diego, CA, June 2—4, 1999 (ACC), 1, 314–318. doi:10.1109/acc.1999.782791
Niculescu, S.-I. (2001). Delay Effects on Stability: A Robust Control Approach, Vol. 269. Springer Science & Business Media.
PooGyeon Park, P. (1999). A Delay-dependent Stability Criterion for Systems with Uncertain Time-Invariant Delays. IEEE Trans. Automat. Contr. 44, 876–877. doi:10.1109/9.754838
Rao, R. R., Aufderheide, B., and Bequette, B. W. (2003). Experimental Studies on Multiple-Model Predictive Control for Automated Regulation of Hemodynamic Variables. IEEE Trans. Biomed. Eng. 50, 277–288. doi:10.1109/tbme.2003.808813
Salavati, S., Grigoriadis, K., and Franchek, M. (2019). Reciprocal Convex Approach to Output-Feedback Control of Uncertain LPV Systems with Fast-Varying Input Delay. Int. J. Robust Nonlinear Control 29 (16), 5744–5764. doi:10.1002/rnc.4697
Sandu, C., and Popescu, D. (2016). Reinforcement Learning for the Control of Blood Pressure in post Cardiac Surgery Patients. U. P. B. Sci. Bull. Ser. C 78, 139–150.
Shamma, J. S. (1988). Analysis and Design of Gain Scheduled Control Systems. Ph.D. thesis. Boston, MA: Massachusetts Institute of Technology.
Shamma, J. S., and Athans, M. (1990). Analysis of Gain Scheduled Control for Nonlinear Plants. IEEE Trans. Automat. Contr. 35, 898–907. doi:10.1109/9.58498
Tasoujian, S., Ebrahimi, B., Grigoriadis, K., and Franchek, M. (2016). “Parameter-varying Loop-Shaping for Delayed Air-Fuel Ratio Control in Lean-Burn SI Engines,” in ASME Dynamic Systems and Control Conference, Minneapolis, MN, October 12—14, 2016 (DSCC), 1–8. doi:10.1115/dscc2016-9813
Tasoujian, S., Grigoriadis, K., and Franchek, M. (2019a). “Delay-dependent Output-Feedback Control for Blood Pressure Regulation Using LPV Techniques,” in ASME Dynamic Systems and Control Conference, Park City, UT, October 8—11, 2019 (DSCC). doi:10.1115/dscc2019-9098
Tasoujian, S., Salavati, S., Franchek, M., and Grigoriadis, K. (2020a). “Robust Delay-dependent LPV Synthesis for Blood Pressure Control with Real-Time Bayesian Parameter Estimation,” in IET Control Theory & Applications.
Tasoujian, S., Salavati, S., Franchek, M., and Grigoriadis, K. (2019b). Robust IMC-PID and Parameter-Varying Control Strategies for Automated Blood Pressure Regulation. Int. J. Control Autom. Syst. 17, 1803–1813. doi:10.1007/s12555-018-0631-7
Tasoujian, S., Salavati, S., Grigoriadis, K., and Franchek, M. (2020b). “Real-time Cubature Kalman Filter Parameter Estimation of Blood Pressure Response Characteristics under Vasoactive Drugs Administration,” in American Control Conference, Denver, CO, July 1—3 (ACC), 1–8. doi:10.23919/acc45564.2020.9147309
Urooj, S., and Singh, B. (2019). Fractional-Order PID Control for Postoperative Mean Arterial Blood Pressure Control Scheme. Proced. Comput. Sci. 152, 380–389. doi:10.1016/j.procs.2019.05.002
Wassar, T., Luspay, T., Upendar, K. R., Moisi, M., Voigt, R. B., Marques, N. R., et al. (2014). Automatic Control of Arterial Pressure for Hypotensive Patients Using Phenylephrine. Int. J. Model. Simulation 34, 187–198. doi:10.2316/journal.205.2014.4.205-6087
Witrant, E., Canudas-de-Wit, C., Georges, D., and Alamir, M. (2007). Remote Stabilization via Communication Networks with a Distributed Control Law. IEEE Trans. Automat. Contr. 52, 1480–1485. doi:10.1109/tac.2007.902757
Wu, F., Yang, X. H., Packard, A., and Becker, G. (1996). Induced L2-Norm Control for Lpv Systems with Bounded Parameter Variation Rates. Int. J. Robust Nonlinear Control 6, 983–998. doi:10.1002/(sici)1099-1239(199611)6:9/10<983::aid-rnc263>3.0.co;2-c
Zhang, X., Tsiotras, P., and Knospe, C. (2002). Stability Analysis of LPV Time-Delayed Systems. Int. J. Control 75, 538–558. doi:10.1080/00207170210123833
Keywords: linear parameter-varying time-delay systems, Lyapunov-Krasovskii functionals, induced L2-norm performance, affine Jensen’s inequality, linear matrix inequalities approach, mean arterial blood pressure regulation and control
Citation: Tasoujian S, Grigoriadis K and Franchek M (2021) An Improved Integral Inequality for Delay-Dependent Gain-Scheduled LPV Control. Front. Control. Eng. 2:687807. doi: 10.3389/fcteg.2021.687807
Received: 30 March 2021; Accepted: 14 July 2021;
Published: 16 August 2021.
Edited by:
Teresa Azevedo Perdicoulis, University of Trás-os-Montes and Alto Douro, PortugalReviewed by:
Cheung-Chieh Ku, National Taiwan Ocean University, TaiwanYunNing Zhang, China Three Gorges University, China
Copyright © 2021 Tasoujian, Grigoriadis and Franchek . This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Shahin Tasoujian, c3Rhc291amlhbkB1aC5lZHU=