 Alfredo García
Alfredo García David Llopis-Castelló
David Llopis-Castelló
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Built Environ. , 11 July 2022
Sec. Transportation and Transit Systems
Volume 8 - 2022 | https://doi.org/10.3389/fbuil.2022.901840
Automated vehicles are designed to maintain both longitudinal and transverse control along a road section under certain favorable conditions. The conditions that ensure a safe operation of an automated vehicle are referred to as Operational Design Domain (ODD). So far, the concept of ODD has focused on the automated vehicle and how it is designed to operate autonomously and safely under certain conditions. However, Road Administrations and Operators would be probably more interested in formulating the concept of ODD from the road standpoint, identifying the sections that really allow an optimal and safe operation for all automated vehicles. Hence, this study introduces the concept of Operational Road Section (ORS), that is, defined as a road section, that is, compatible with all automated vehicles’ ODDs. This would result in very low disengagements of SAE Level 2 and 3 vehicles, and no disengagements at all of any SAE Level 4 vehicle, as long as their conditions do not vary. These road sections are determined as the overlapping of all the ODDs corresponding to all the automated vehicles traveling through a road segment. The concept of ORS will play a key role in the identification of the road features that promote a safe automated driving. With this information, Road Administrations and Operators could 1) establish improvement actions for extended automated operation and thus longer ORSs; and 2) manage driving restrictions to certain driving automation systems. Finally, a case study is presented showing the applicability of the ORS concept on a two-lane rural road segment.
By 2022, 638,000 automated vehicles are expected to be on the road worldwide, while by 2030, sales of this type of vehicle are estimated to account for 12% of the entire automotive sector (ERF, 2020). In this context, it is expected that by 2035, 20%, 24%, and 29% of the global fleet of these vehicles will be in Europe, China, and the United States, respectively (Wagner, 2020). Furthermore, the level of maturity in the market for this type of vehicle varies greatly within the same region (ERF, 2020). In the specific case of Europe, countries such as Sweden, the Netherlands, and the United Kingdom are in the lead in terms of autonomous and connected mobility. On the opposite side are Portugal, Spain, and Belgium, with a maturity level of one on a scale from 0 to 4 (ERF, 2020).
Sales of SAE Level 2 vehicles are on the increase. These vehicles are capable of simultaneously control longitudinal and lateral movements within the lane (SAE, 2021). However, these vehicles are sometimes unable to perform this task and must release the control to the human driver. This is why these vehicles require the presence and continuous supervision of the human driver. These events are commonly referred to as disengagements and constitute one of the main safety issues of the automated driving system, especially if the human driver is distracted. SAE Level 3 vehicles go one step further, asking the human driver to retake control instead of directly disengage (SAE, 2021).
These disengagements or Take Over Requests (TOR) may be triggered by different factors. However, road infrastructure has been found to be behind many of them (García et al., 2019; García et al. 2020a; García et al. 2020b). In order to foster the fast deployment of CAVs, it is recommended to analyze which characteristics of the road infrastructure trigger these events. Some of these factors are: 1) type of road; 2) traffic and environmental characteristics; 3) speed range; 4) incidents and crashes; 5) road works and maintenance activities.
Here is where the concept of Operational Design Domain (ODD) comes in. An ODD can be defined as “the operating conditions under which a given driving automation system or feature thereof is specifically designed to function” (BSI, 2020). Therefore, ODD is a concept based on the capabilities of every single automated vehicle. ODDs are especially important for SAE Level 4 vehicles, given that these vehicles can always perform the Driving Dynamic Task within their ODD. While lower SAE Levels cannot ensure this performance, they would perform quite better when conditions match their ODDs.
Despite some initiatives (Automated Vehicle Safety Consortium 2020; BSI 2020; European ITS Platform 2020), to date, there are serious limitations in the application of this concept, especially due to a lack of standardization. This would require specifying all possible factors, attributes, and thresholds for which an automated vehicle should be able to operate autonomously. It is important to highlight that ODD is a vehicle-based concept, i.e., every single vehicle would present different ODDs, regardless how well these can be defined. This is an important limitation from the road infrastructure perspective.
In conclusion, the ODD concept is not suitable from the point of view of the road and its environment, which is what Road Administrations—as those responsible for the planning and management of roads—are most interested in. Therefore, the ODD concept should be adapted to reflect which road sections present the appropriate characteristics that enable the operation of a certain driving automation system. As indicated above, the interaction between an automated vehicle and the road infrastructure plays a major role, in addition to other environmental factors.
Another remarkable limitation is that along a corridor, every vehicle performs through a variety of sections, some of them matching their ODD and some not. Moreover, these sections vary across automated vehicles, hindering the application of an ODD-like concept from the road infrastructure side.
Therefore, it is necessary to formulate a more different concept that can cope with these particularities and allows Road Administrations and Operators to establish improvement actions to extend automated operation and manage driving restrictions to certain driving automation systems. This concept must be operational for the design, maintenance, and management of existing and future roads.
This study aims at exploring this new concept. Section 2 analyzes the limitations of the use of ODDs. Afterwards, Section 3 presents the evolution of the ODD concept and Section 4 describes the adaptation of the ODDs to the road. Then, Section 5 introduces the concept of Operational Road Section, discussing it in Section 6. Section 7 shows a Case Study of the application of this concept. Finally, Section 8 summarizes the main conclusions of the study.
Existing definitions of ODD focus on the automated vehicle and how it is designed to operate autonomous and safely under certain environments and conditions. As indicated above, from the side of Road Administrations and Operators, a definition of ODD formulated from the road and its environment perspective would be of higher interest.
So far, there is no full consensus on the definition of an ODD, but the differences are even more evident in the factors and conditions that must support it. Another important issue related to the specification of an ODD is the probability of occurrence of certain conflicting events versus the accuracy of the detection system as a reliability rate. These are concepts that are not directly comparable but are associated with and fully affect the ODD. An ODD must guarantee the autonomous operation of the system to which it refers (as long as it is working properly). Therefore, it cannot be defined with factors, attributes, and conditions that establish probabilistic limitations, but the thresholds must have enough margin so that the operating conditions are totally safe. Outside the range of the ODD, the automated vehicle could still operate, but it is no longer guaranteed.
An example might be a pedestrian crossing a road. This is a conflicting event with a low probability of occurrence (e.g., 10%). If the automated system for which the ODD is defined covered that road section, with pedestrian presence, it would not be permissible for the automated detection of pedestrians on the roadway to have an accurate detection of 70%. For this vehicle, that road section should not meet the ODD. If this event occurs for many vehicles, the authorities could consider prohibiting the presence of pedestrians on the roadway or physically avoiding them from crossing the roadway, thus extending the compatibility of the road for most vehicles (note that this decision is based not only on the performance of a single vehicle).
Another issue that remains unclear is how the ODD varies with the performance of the automated vehicle (e.g., with speed). In fact, for each ODD, the automated speed, defined by García et al. (2020a) as the maximum driving speed at which the vehicle can operate autonomously, should be considered as a parameter. What if the vehicle and/or its driver experience higher speeds, either voluntarily or as a necessity of an evasive maneuver? Even meeting the automated speed, slippage could occur due to poor tire condition which would be a limitation of the vehicle itself, not of the ODD.
Speed is therefore a very sensitive factor to be considered in the ODD and in the design and operation of a road section. Whether the automated speed has to be related to the design speed and the generic speed limit of each road segment has not yet been finalized. In order to ensure a safe mobility for mixed traffic -conventional vehicles and automated vehicles-in the coming years, the maximum speeds of the ODDs of automated vehicles that are compatible with a certain road section should be, at least, those corresponding to the design speed and the generic speed limit.
The ASAM OpenODD Project (ASAM, 2021) is working to integrate the concept of conditional or reduced ODD. This contribution is going to be very necessary as an ODD, with its attributes, specifies a complete operational range for an automated system. However, there may be a certain attribute of the ODD that presents a limitation in a certain period of time and spatial scope, which means that the range of the ODD must be restricted, without having to completely abandon the ODD.
A clear example is the attribute of the range of speeds at which an automated system can operate (e.g., between 0 and 80 km/h). However, in the case of dense fog (assuming that the concept of “dense fog” is well defined), the automated system could be kept within its ODD, conditioned or reduced, if the speed range is changed to 0–40 km/h.
Another issue to take into account is related to the fact that the ODD of an automated vehicle must be valid throughout its lifespan, since it will be a fundamental part of its safety and that of other vehicles and users. Thus, automakers should be able to update on-board automation technologies, at least on the computing side, and thus enable a dynamic or improved ODD. Every improvement introduced in the vehicle’s automation system will lead to greater robustness and expansion of its ODDs. In this way, there will be versions of the ODD for the same automated vehicle throughout its lifespan.
This expansion of ODDs requires new thresholds and even the elimination of some of the factors or attributes as constraints. All these dynamics mean that the safety attributed to an ODD through its factors and thresholds is not easy to manage and ensure. The automated vehicle operates in the real world, moving within all possible dimensions of the declared ODD, and surprises or conflicts may arise with some frequency. There are so many extreme events and situations that even experts cannot anticipate real tests or in simulation environments to deal with all the variety of surprises (Fraade-Blanar et al., 2018).
Therefore, the current approach to the ODD concept leads to the fact that the focus of automated driving safety is being oriented towards nominal safety, i.e., based on meeting a set of limits, neglecting that actual safety is a continuum (Blumenthal et al., 2020).
According to what this, an automated vehicle may be traveling within its ODD but, at one point, an event or conflict may trigger its exit from the operational domain. The level of safety then comes to be in the management of minimum risk maneuvers that may lead the vehicle to transfer control to the driver or to look for a minimum risk condition or location. However, it may also be possible to develop preventive actions, such as slowing down, to stay within a conditioned or reduced ODD.
Thus, the benefits of automated driving on road safety should be thoroughly studied to define the factors and limits that really contribute to maximize the safety of the resulting system. Moreover, safety must not fall only on the automation systems, through the ODDs, but physical infrastructure, digital infrastructure, and connectivity must play an important role. Last but not least, drivers will continue to play a crucial role in safety as they will have to intervene when necessary.
To this regard, a new concept -Operational Design Condition (ODC) has recently been proposed that encompasses the ODD and aims to clarify the confusion surrounding it (Khastgir, 2020). ODC includes the capabilities of the target vehicle at any given time and those of the driver. This more integrated approach can lead to a safer system by dynamically contemplating the ODD depending on the vehicle operation and the driver’s situation with respect to regaining manual control.
So far, the approach and development of the ODD focuses on the design of the automated vehicle so that it can travel autonomously and safely along certain road sections or areas if the factors and conditions included in its definition are met. In this way, the ODD is not defined from the side of the road and its environment, which is what Road Administrations may be most interested in.
From the road perspective, an ODD could be defined as a section of road that has a series of characteristics that allow, for a certain period of time, the operation of a specific automated driving system. The key, therefore, lies in the limitations that may exist in the interaction between an automated vehicle and the road infrastructure, in addition to various environmental factors or variables. The concept can probably be made clearer by not only saying what it includes but also what it excludes, i.e., the factors and thresholds that cause disengagements.
For a Road Administration or Operator, a whole range of needs should be able to be addressed (ASAM, 2021):
• To have easy access to the ODD specifications of all vehicles traveling on its roads so as to have a clear view of current demands and to be able to estimate future demands on its road network.
• To have the ability to warn vehicles in advance if they are about to choose a route through its road network, that is, likely to exceed or be outside of the ODD.
• To provide recommendations to automated vehicles on which routes, roads, and lanes to use depending on the ODD capabilities.
• To have the ability to easily communicate current ODD constraints on certain sections or segments of its network.
• To have control over the version of each ODD format, as it can change over time.
TomTom (2022) company is addressing some of these requirements through its new tool RoadCheck, within its HD map package for in-vehicle navigation (TomTom, 2022). If all ODDs are georeferenced on a single HD map, Road Administrations will be able to know which sections allow automated traffic for any vehicle and also which sections have limitations and, therefore, do not allow automated traffic for all automated vehicles.
Road Administrations cannot be oblivious and subservient to automakers who unilaterally decide on the design of their automated systems without really knowing what is happening with the physical infrastructure and how the physical infrastructure could be improved and adapted to make ODDs longer and more robust.
To achieve a truly safe system, Road Administrations and Operators need to know what the existing multiple ODDs are like and how they adapt to the conditions of each road in order to manage them efficiently.
Given the limitations of the ODDs when applied to roads, it is necessary to adapt or interpret the ODDs from the point of view of road infrastructure to know which road sections can really allow the optimal and safe operation of all automated vehicles.
These road sections are obtained by overlapping the ODD conditions of all automated vehicles traveling along a road segment. A section that matches with all of them would ensure automation for any automated vehicle. This is a new concept that makes or allows an adaptation of the ODDs to the reality of the road infrastructure.
This new concept is proposed to be called Operational Road Section (ORS) and is defined as a road section where all automated systems can operate safely, taking into account the features of the physical and digital infrastructure. Some environmental factors may temporarily limit automation of some vehicles, anyway.
Figure 1 depicts the ORS concept along a road segment. The horizontal lines correspond to the ODD compatibility zones of various automated vehicles—green: matches ODD, red: does not match ODD. The sections that allow the operation of all automated systems are those which are compatible with the ODD of all vehicles. Several Operational Road Sections (ORSs) are therefore obtained, shown in green at the bottom. Similarly, red sections mean that, at least, one automated vehicle is unable to operate autonomously.
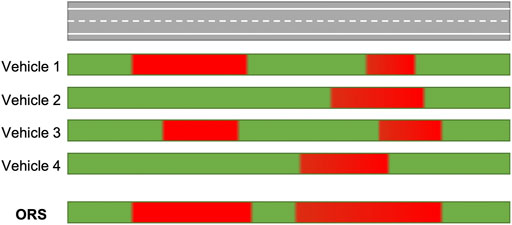
FIGURE 1. Operational Road Sections along a road segment.
The Operational Road Section concept presents many advantages for Road Administrations, Operators, and users.
By mapping ORS across their road networks, Road Administrations (RAs) and Operators (ROs) could know where automated vehicles can perform without major issues. Operational Road Sections are expected to perform better in terms of safety and operation, so RAs and ROs should invest on improving and adapting other road sections to foster automation. This may be done by changing some of the parameters that affect vehicles’ ODDs. Some of them may be very cost-effective (i.e., road markings), some others may be otherwise (e.g., changing the geometry of the road alignment).
RAs and ROs could also establish restrictions to driving automation systems that do not comply with certain specifications, thus encouraging manufacturers to develop the automation technology of new vehicles and to upgrade existing automated vehicles. It is worth to mention that if automakers made ODDs explicit, ORSs would be easier to identify, and Original Equipment Manufacturers (OEMs) could receive feedback from Road Administrations to improve their systems.
Operational Road Sections will vary in time as new, more advanced automated vehicles with more robust ODDs are introduced into the market. At an early stage, most driving automation systems are expected to only support sections of freeways and expressways with smooth horizontal and vertical alignments. As technology evolves, other sections will be supported by all systems, lengthening and merging Operational Road Sections. Ultimately, entire corridors could even match with a single ORS.
Road Administrations and Operators could place vertical signs before entering and exiting Operational Road Sections, encouraging drivers to activate their systems or to disable/supervise them with higher attention, respectively. It would be better if these indications are shown in Dynamic Message Signs, given the evolution of ORSs in time.
In order to better understand how to georeference the Operational Design Domains of various automated vehicles, as well as the determination of the Operational Road Sections, a case study has been carried out on a 5.25 km long road segment of a two-lane rural road (Figure 2). This road segment belongs to the CV-50 road, located between Cheste and Villamarchante (Spain).
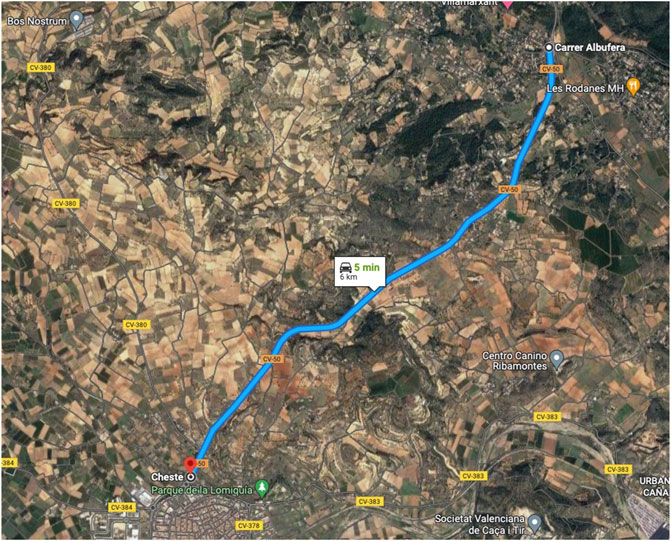
FIGURE 2. Aerial view of the road segment. Map data: Google, Imagery ©2022 CNES/Airbus, European Space Imaging, Maxar Technologies. Map data ©2022 Inst. Geogr. Nacional.
The road segment traverses rolling terrain with a minimum horizontal radius of 254 m and a smooth vertical alignment. Lane and shoulder widths are 3.5 and 1.5 m, respectively. The design speed of the road segment is 80 km/h whereas the speed is limited to 90 km/h. Road markings show good conditions for lane detection.
The behavior of three SAE Level 2 vehicles along this road was tested, determining where disengagements took place. This allows an indirect approximation to how the ODDs of these vehicles apply to this road. These three vehicles were: 1) BMW 5-series equipped with the Driving Assistant Plus package, of 2017; 2) Volkswagen Tiguan with the Driving Assistance package, of 2020; and 3) Audi Q2 with the Driving Assistance Pack, of 2019. All of them presented longitudinal control by adaptive cruise control (ACC) and lateral control by lane keeping assist (LKA).
Since explicit ODDs of these vehicles remain unknown to us, these had to be obtained empirically. This was done by performing diverse runs along the road at different steady speeds (70, 80, and 90 km/h), always below the speed limit, according to the procedure described in García et al. (2020a): the vehicle performs driving at the speed using the automated mode. If it disengages, a new, lower speed is tried repeatedly until a speed that does not trigger disengagement is attained. This is called the automated speed.
In order to better locate disengagements, a GPS video camera was used (Garmin Virb Elite) in every run. This camera records in High Definition and includes GPS geolocation. It was placed beside the driver’s head to simultaneously record the road, the vehicle position, the dashboard, the position of the hands on the steering wheel, and the driver’s voice (Figure 3). The video recordings were used to identify the disengagements (road station and time) triggered by every automated system. After each disengagement, the automated system required some time to regain control, being this location also registered (road station and time). This part of the road cannot be considered within the ODD of the vehicle.

FIGURE 3. Field of view of the video camera during data collection.
For each automated vehicle there were several sections compatible with its ODD, identified from the station where the automated system regains control to the next station that produces the following disengagement. Between successive compatible sections there are sections of no automation or manual control by the driver. As an example, Figure 4 shows the ODD-compatible sections, in green, of the BMW vehicle traveling at a speed of 80 km/h. The red sections show where the vehicle was unable to operate in an automated way. Additionally, black horizontal lines represent the automated speed for each horizontal curve. In this case, system disengagements coincide exactly with horizontal curves with an automated speed lower than the traveling speed (80 km/h). Nevertheless, system disengagements are not always caused by factors related to road alignment.
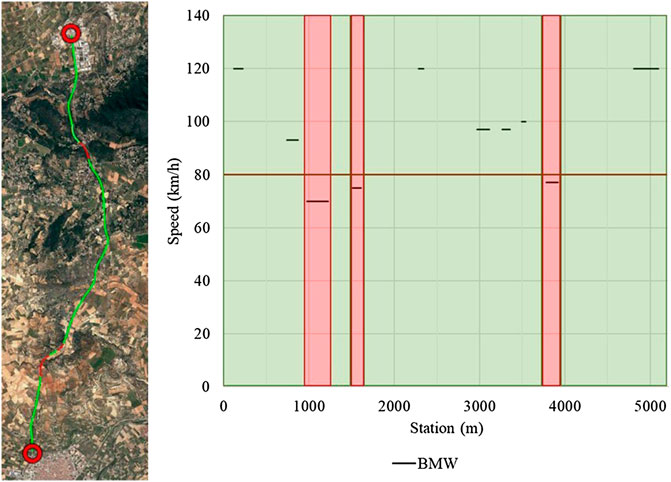
FIGURE 4. ODD-compatible sections (in green) for the BMW vehicle traveling at 80 km/h.
Figure 5 shows, for each traveling speed, the sections compatible with the ODDs of the three vehicles in green. By intersecting all the ODDs, the Operational Road Sections (ORSs) can be identified (Figure 5). It is important to know that vehicles need some time to retake autonomous driving mode after abandoning the zone that triggered the disengagement. This means that the ORSs identified using this methodology are larger than the actual ORSs that could be obtained by simply comparing the critical road features causing disengagements. Therefore, it seems necessary to define two ORS types: 1) Effective ORS, obtained following this methodology; and 2) strict ORS, obtained by comparing the ODD-related features that can be measured. The strict ORS will always be shorter than the effective ORS.

FIGURE 5. Determination of Operational Road Sections (in green) for different steady speeds: (A) 70 km/h; (B) 80 km/h; (C) 90 km/h.
Effective ORSs are especially important from the point of view of drivers, since this is what vehicles will actually experience. On the other hand, strict ORSs are important for Road Administrations and Operators, as well as for vehicle manufacturers. By identifying the critical road features, the former ones could focus on changing the infrastructure and allow more varied CAVs on the road. The latter would have a more specific goal to develop their automation technology.
If the obtained ORSs partially contain a road geometric feature—horizontal or vertical curve—at their beginning or end, it should be narrowed by deleting the portion of this feature, if causing disengagements.
Given that the speed limit of the road segment is 90 km/h, the Operational Road Sections (ORS) corresponding to that speed should be adopted, resulting in the road sections shown in Table 1.

TABLE 1. Operational Road Sections traveling at speed limit (90 km/h).
Operational Design Domains (ODDs) are critical to ensure the best automation experience. However, the application of this concept presents several limitations as of today, highlighting the lack of clear and standard taxonomy, the lack of clear information from manufacturers, and the unavailability of SAE level 4 vehicles.
With the ODD information, Road Administrations and Operators could foresee which vehicles are able to perform along a certain road facility. However, ODDs are specific for each automated vehicle, so their use cannot be directly applied by these stakeholders.
A new concept that overcomes this limitation has been presented: Operational Road Sections (ORSs). These sections are obtained by overlapping the road sections that are compatible with the ODDs of all vehicles, so an ORS will be compatible with the ODD of all automated vehicles. The advantage of its use for Road Administrations, Operators, manufacturers, and drivers have been presented. Limitations about this application—especially nowadays—have also been outlined. Finally, a case study has been incorporated to explain how ORSs could be obtained.
The interaction between Road Administrations and Operators with vehicle manufacturers would also change with this concept. The concept of ORS will allow Road Administrations and Operators to infer the characteristics of the road and their thresholds which fully facilitate the operation of the automated systems. In this way, Road Administrations and Operators will be able to establish actions for improvement and adaptation of other road sections to expand the Operational Road Sections. Additionally, this concept will help Road Administrations and Operators to define traffic restrictions on some automated systems and thus encourage vehicle and automated system manufacturers to advance in their developments, not only for new vehicles but also for upgrading automated vehicles already in the market.
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Conceptualization, AG and FJC-T; methodology, AG, FJC-T, and DL-C; analysis, AG and DL-C; writing-original draft preparation, DL-C; writing-review and editing, AG and FJC-T; supervision, AG; project administration, AG; funding acquisition, AG All authors have read and agreed to the published version of the manuscript.
This research is part of the PIARC’s Special Project “Smart Roads Classification,” funded by World Road Association—PIARC.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
The authors would like to acknowledge the comments and suggestions of the Project Oversight Team (POT) of the PIARC’s Special Project “Smart Roads Classification”.
ASAM (2021). P2020-08 ASAM OpenODD Project. Available at: https://www.asam.net/project-detail/asam-openodd/. (Accessed December 25, 2021)
Automated Vehicle Safety Consortium (2020). “VSC Best Practice for Describing an Operational Design Domain: Conceptual Framework and Lexicon”.
Blumenthal, M., Fraade-Blanar, L., Best, R., and Irwin, J. (2020). Safe Enough: Approaches to Assessing Acceptable Safety for Automated Vehicles. Santa Monica, CA: RAND Corporation. doi:10.7249/RRA569-1
BSI (2020). Connected and Automated Vehicles – Vocabulary v3.0. London: The British Standards Institution.
ERF (2020). New Mobility and Road Infrastructure. Brussels (Belgium): European Road Federation. Available at: http://www.cica.net/new-mobility-and-road-infrastructure-main-findings-of-a-benchmark-study-in-20-countries/. (Accessed January 21, 2021)
European ITS Platform (2020). Task 3: Roadmap and Action Plan to Facilitate Automated Driving on TEN Road Network, 2. EU EIP SA4.
Fraade-Blanar, L., Blumenthal, M. S., Anderson, J. M., and Kalra, N. (2018). Measuring Automated Vehicle Safety: Forging a Framework. Santa Monica, CA: RAND Corporation. Available at: https://www.rand.org/pubs/research_reports/RR2662.html.
García, A., Camacho-Torregrosa, F. J., and Padovani Baez, P. V. (2020a). Examining the Effect of Road Horizontal Alignment on the Speed of Semi-automated Vehicles. Accid. Analysis Prev. 146, 105732. doi:10.1016/j.aap.2020.105732
García, A., Camacho-Torregrosa, F. J., and Padovani Baez, P. V. (2020b). Influence of Lane Width on Semi-autonomous Vehicle Performance. Transp. Res. Rec. 9 (2674), 279. doi:10.1177/0361198120928351
García, A., Llopis-Castelló, D., and Camacho-Torregrosa, F. J. (2019). Influence of the Designo F Crest Vertical Curves on Automated Driving Experience. Proceedings of the Transportation Research Board 98th Annual Meeting.
Khastgir, S. (2020). The Curious Case of Operational Design Domain: what it Is and Is Not? Available at: https://medium.com/@siddkhastgir/the-curious-case-of-operational-design-domain-what-it-is-and-is-not-e0180b92a3ae. (Accessed March 15, 2021)
SAE (2021). SAE Surface Vehicle Recommended Practice J3016: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. Available at: https://saemobilus.sae.org/content/J3016_202104/. (Accessed May 15, 2021)
TomTom, (2022). Roadcheck Product. Available at: https://www.tomtom.com/products/roadcheck/. (Accessed March 8, 2022)
Keywords: automated vehicle, operational design domain, operational road section, smart road, road management
Citation: García A, Llopis-Castelló D and Camacho-Torregrosa FJ (2022) From the Vehicle-Based Concept of Operational Design Domain to the Road-Based Concept of Operational Road Section. Front. Built Environ. 8:901840. doi: 10.3389/fbuil.2022.901840
Received: 22 March 2022; Accepted: 22 June 2022;
Published: 11 July 2022.
Edited by:
Anna Granà, University of Palermo, ItalyCopyright © 2022 García, Llopis-Castelló and Camacho-Torregrosa. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Alfredo García, YWdhcmNpYWdAdHJhLnVwdi5lcw==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.