 Raffaele Capuano
Raffaele Capuano Aguinaldo Fraddosio
Aguinaldo Fraddosio Mario Daniele Piccioni2
Mario Daniele Piccioni2
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
MINI REVIEW article
Front. Built Environ. , 14 November 2022
Sec. Earthquake Engineering
Volume 8 - 2022 | https://doi.org/10.3389/fbuil.2022.1048533
This article is part of the Research Topic Rising Stars in Built Environment View all 10 articles
A great variety of phenomenological models has been proposed over the years to model rate-independent hysteretic forces in structural mechanics. The classification of such models is usually based on the type of equation that needs to be solved to evaluate the output variable. In particular, we distinguish among algebraic, transcendental, differential and integral models. For algebraic (transcendental) models, an algebraic (a transcendental) equation needs to be solved to compute the output variable; conversely, differential equations are employed for differential models, whereas equations expressed in integral form characterize integral models. This paper provides a mini-review of the most adopted phenomenological rate-independent uniaxial hysteretic models. Such models are selected in order to provide a complete overview of the four types of previously mentioned models, currently available in the literature. In particular, we illustrate the fundamental characteristics of each model and discuss their peculiarities in terms of 1) number of adopted parameters and variables, 2) physical interpretation of parameters and related calibration procedures, 3) type of hysteresis loop shapes that can be simulated.
The mathematical modeling of hysteresis phenomena is a challenging problem addressed during the years by different authors by means of different models. The main aim of the various authors was to obtain accurate and computationally efficient models based on a small number of parameters (Vaiana et al., 2019b). The model proposed in the literature can be classified into four main categories based on the type of equation that need to be solved to compute the output variable (Vaiana et al., 2018; Vaiana et al., 2021b). In particular, we have: 1) algebraic, 2) transcendental, 3) differential, 4) integral models.
The Ramberg-Osgood model is an algebraic model formulated by Ramberg and Osgood (1943). In this model, generally used for simulating the behavior of steel, the generalized displacement u is assumed as the output variable and is expressed as the sum of two terms:
an elastic and a plastic generalized displacement indicated, respectively, as ue and up. In particular, the generalized displacement is evaluated in a closed-form as:
where E is the elastic modulus, K and n are constants that depend on the considered material. The first term on the right-hand side of Eq. 2 is equal to the elastic part of the generalized displacement, whereas the second term accounts for the plastic part. The parameters K and n describe the hardening behavior of the material. Introducing the generalized yield force of the material fy, and defining a new parameter α as:
it is possible to rewrite the general expression as follows:
Since Eq. 4 defines the skeleton curve, it is necessary to adopt the Masing rule (Masing and Mauksch, 1926) in order to simulate an entire hysteresis loop.
As reported in Carreño et al. (2020), the model was first developed by Giuffrè (1970), and was based on the nonlinear stress-strain relation proposed by Goldberg and Richard (1963) and incorporates the effect of plastic deformations on the Bauschinger effect observed in steel tested experimentally. The formulation was further improved by Menegotto and Pinto (1973) and subsequently used by multiple authors due to its simplicity and accuracy in predicting the response of reinforcing steel. Filippou et al. (1983) later incorporated the effect of isotropic hardening into the constitutive law. The formulation proposed by Filippou is often preferred in the modeling of reinforced concrete systems given the consistent response and limited failures in convergence observed in the nonlinear analysis of large structural models. The constitutive relation of the model is:
where E is the elastic modulus, Eh is the post-elastic stiffness, uy is the yield generalized displacement and r is a parameter which controls the rate of variation of the tangent stiffness from E to Eh. In particular, the expression for the evaluation of the parameter r is:
Since Eq. 5 defines the skeleton curve, as done for the Ramberg-Osgood model, it is necessary to adopt the Masing rule in order to simulate an entire hysteresis loop.
The model proposed by Vaiana et al. (2019a) is a uniaxial phenomenological model which can simulate hysteresis loops limited by two parallel straight lines or curves by adopting a set of only five parameters easy to calibrate (Sessa et al., 2020). Furthermore, the model allows one to evaluate the output variable by means of a closed form expression having an algebraic nature.
In particular, the generalized force f, during the generic loading phase
whereas, during the generic unloading phase
In Eqs. 7 and 8, c+ and c− represent, respectively, the generic loading and unloading curves whose expressions are:
whereas cu and cl are, respectively, the upper and lower limiting curves having expressions:
The internal variable
where uP and fP are the coordinates of the initial point of c+ (c−).
The internal model parameters u0 and f0 can be expressed in terms of the parameters ka, kb, and α as follows:
where δk is the difference between the two different values assumed by the transverse tangent stiffness at
The transcendental model proposed by Kikuchi and Aiken (1997) was formulated with the purpose of accurately predicting the response of elastomeric bearings (Losanno et al., 2019; Losanno et al., 2022a; Losanno et al., 2022b; Losanno et al., 2022c).
The generalized force f is expressed as the sum of two terms:
where
and
In particular, fu is the generalized force at zero generalized displacements, fm is the generalized peak force on the skeleton curve, um is the generalized peak displacement on the skeleton curve and the parameter n specifies the stiffening phenomenon. The model parameters a, b, and c are obtained by imposing the following expressions:
where heq is the equivalent viscous damping ratio, evaluated from an empirical formula as a function of the generalized force, which is determined from the results of tests performed on individual bearings. Both Eqs. 20 and 21 are derived assuming that the analytical hysteresis loop area matches the experimental one.
Eq. 19 are derived for application to steady-state hysteresis behaviors for elastomeric bearings. Masing rule is applied to fully define the generalized force under a randomly-varying displacement, and Eq. 19 are replaced by:
where
and (ui, fi) is the most recent point of load reversal.
The model proposed by Vaiana and Rosati (2023) is a new uniaxial phenomenological model which can simulate a great number of rate-independent hysteretic responses characterized by symmetric, asymmetric, pinched, S-shaped, flag-shaped hysteresis loops or by a combination of them. The model is based on two sets of eight parameters controlling the loading and unloading phase in a separate way. Furthermore, the model allows one to evaluate the output variable by means of a closed form expression having an exponential nature.
In particular, the generalized force f, during the generic loading phase
whereas, during the generic unloading phase
In Eqs. 24 and 25, c+ and c− represent, respectively, the generic loading and unloading curves whose expressions are:
whereas cu and cl are, respectively, the upper and lower limiting curves having expressions:
The internal variable
where uP and fP are the coordinates of the initial point of c+ (c−).
The Bouc-Wen model is a uniaxial rate-independent hysteretic model, having a differential nature, that has been originally formulated by Bouc (1967) and subsequently extended by Wen (1976). The model is capable of simulating symmetric generalized force-displacement hysteresis loops (Visintin, 2013; Carboni et al., 2018). In the formulation of the model proposed by Wen (1980), the differential equation that defines the model and that needs to be solved is:
where β, γ, A and n influence the generalized force-displacement hysteresis loop shape. In particular, parameters γ and β control the shape of the hysteresis loop, A the restoring force amplitude, and n the rate of variation between the initial and the asymptotic tangent stiffness, a large value of n corresponds to an almost bilinear hysteresis loop.
The model was proposed by Ozdemir (1976) and illustrated in more detail in Graesser and Cozzarelli (1991). The model proposed by Ozdemir is a modified form of the Bouc-Wen model. This model is general enough to include a variety of different types of hysteretic behavior. In addition, the material model is linked to experimental studies of the properties of a nickel-titanium shape-memory alloy (SMA). The equations that describe the model are:
where f is the generalized force, u is the generalized displacement, β is the generalized back-force, E is the elastic modulus, Y is the generalized force correspondent to the point obtained as the intersection of the upper limiting straight line and the tangent line to the origin, n is a constant parameter controlling the rate of variation of the tangent stiffness from E to the asymptotic value Ey, and α is a constant controlling the tangent stiffness of the hysteresis loop and is given by:
The Preisach model, first derived in Preisach (1935) and than described in Kuczmann (2010) and Mayergoyz (1986), is an integral model given by:
The model is obtained considering an infinite set of simplest hysteresis operators γ. These operators can be represented by rectangular loops on the input-output plane. Numbers α and β correspond to up and down switching values of input. The outputs of these operators may assume only two values, + 1 and −1.
Along with the set of operators γ, the model considers an arbitrary weight function μ(α, β). To determine μ(α, β), the set of first order reversal curves should be experimentally found. This can be done by bringing first the input to such a value that outputs of all operators γ are equal to −1. Now if we gradually increase the input value, then we will follow along a limiting ascending branch. The notation fα will be used for the output value on this branch corresponding to the input u = α. The notation fαβ will be used for the output value on the transition curve attached to the limiting ascending branch at the point fα. This output value corresponds to the input u = β. At this point we can define the function:
Finally it can be proved that:
In this review, we made an overview of some celebrated and recently formulated models to illustrate their fundamental characteristics with particular attention to the number of parameters that need to be set (Table 1) and, if present, their physical interpretation. We also show the different kinds of hysteresis loop shapes, shown in Figure 1, that can be simulated by using the different models.
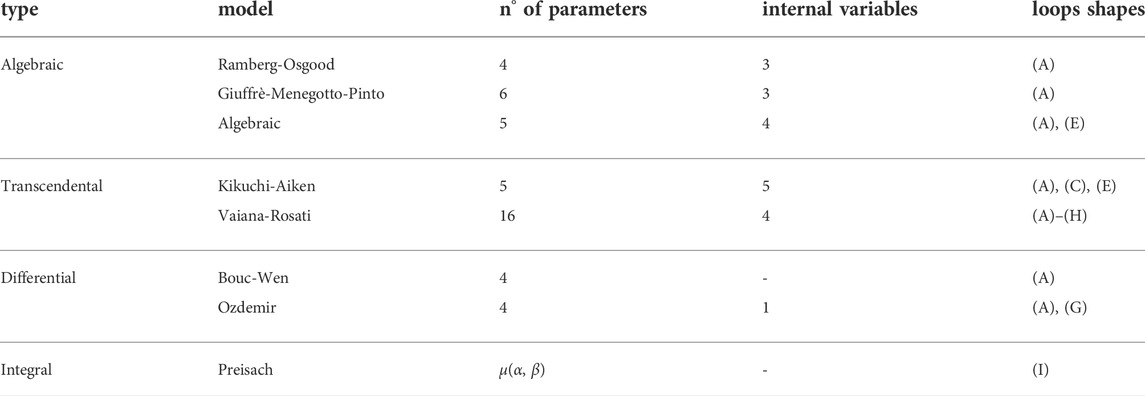
TABLE 1. Uniaxial phenomenological models.
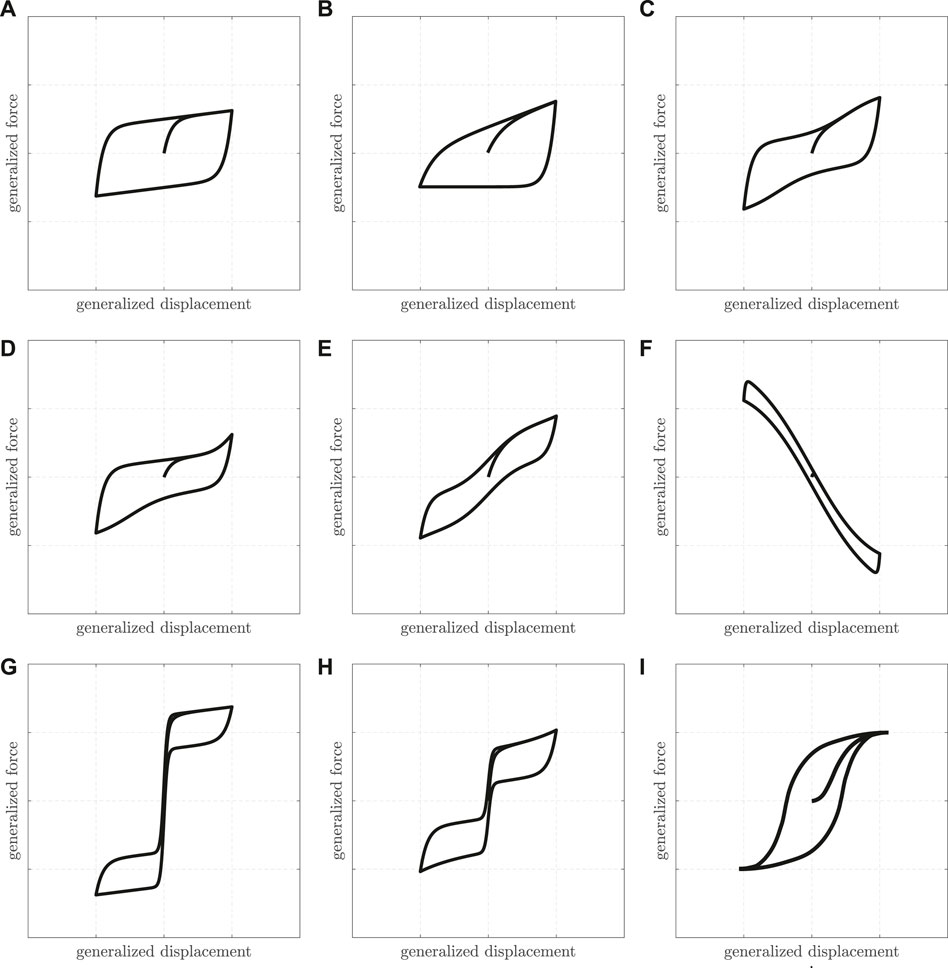
FIGURE 1. Hysteresis loops shapes.
In particular, from Table 1 it can be noted that:
• differential models require a small number of parameters but can simulate only simple hysteresis loops shape;
• models such as the algebraic Ramberg-Osgood, the Giuffrè-Menegotto-Pinto, and the transcendental Kikuchi-Aiken, define only the skeleton curve of a loop. Therefore, it is necessary to use the Masing rule to simulate an entire hysteresis loop, which involves the addition of a series of internal variables;
• the Vaiana-Rosati model, despite the number of parameters, allows for the simulation of the vast majority of hysteresis loop shapes through closed-form expressions;
• the hysteresis loop shape in Figure 1I, typical of the magnetic hysteresis, can be simulated only by the Preisach model, which presents significant difficulties in the evaluation of the output variable.
RC: Writing—original draft, Writing—review and editing. AF: Supervision. MP: Supervision.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The reviewer GM declared a past co-authorship with the authors AF, MP to the handling editor.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Bouc, R. (1967). “Forced vibration of mechanical systems with hysteresis,” in Proceedings of the 4th Conference on Nonlinear Oscillation, Prague, Czechoslovakia, September 5–9, 1967.
Carboni, B., Lacarbonara, W., Brewick, P. T., and Masri, S. F. (2018). Dynamical response identification of a class of nonlinear hysteretic systems. J. Intelligent Material Syst. Struct. 29, 2795–2810. doi:10.1177/1045389x18778792
Carreño, R., Lotfizadeh, K., Conte, J., and Restrepo, J. (2020). Material model parameters for the giuffrè-menegotto-pinto uniaxial steel stress-strain model. J. Struct. Eng. (N. Y. N. Y). 146, 04019205. doi:10.1061/(asce)st.1943-541x.0002505
Filippou, F. C., Popov, E. P., and Bertero, V. V. (1983). Effects of bond deterioration on hysteretic behavior of reinforced concrete joints. EERC Report 83/19, Berkeley: Earthquake Engineering Research Center, University of California.
Giuffrè, A. (1970). Il comportamento del cemento armato per sollecitazioni cicliche di forte intensità. G. del Genio Civ. 28, 1–20.
Goldberg, J. E., and Richard, R. M. (1963). Analysis of nonlinear structures. J. Struct. Div. 89, 333–351. doi:10.1061/jsdeag.0000948
Graesser, E., and Cozzarelli, F. (1991). Shape-memory alloys as new materials for aseismic isolation. J. Eng. Mech. 117, 2590–2608. doi:10.1061/(asce)0733-9399(1991)117:11(2590)
Kikuchi, M., and Aiken, I. D. (1997). An analytical hysteresis model for elastomeric seismic isolation bearings. Earthq. Eng. Struct. Dyn. 26, 215–231. doi:10.1002/(sici)1096-9845(199702)26:2<215:aid-eqe640>3.0.co;2-9
Losanno, D., Hadad, H., and Serino, G. (2019). Design charts for eurocode-based design of elastomeric seismic isolation systems. Soil Dyn. Earthq. Eng. 119, 488–498. doi:10.1016/j.soildyn.2017.12.017
Losanno, D., Calabrese, A., Madera-Sierra, I., Spizzuoco, M., Marulanda, J., Thomson, P., et al. (2022a). Recycled versus natural-rubber fiber-reinforced bearings for base isolation: review of the experimental findings. J. Earthq. Eng. 26, 1921–1940. doi:10.1080/13632469.2020.1748764
Losanno, D., De Domenico, D., and Madera-Sierra, I. (2022b). Experimental testing of full-scale fiber reinforced elastomeric isolators (freis) in unbounded configuration. Eng. Struct. 260, 114234. doi:10.1016/j.engstruct.2022.114234
Losanno, D., Palumbo, F., Calabrese, A., Barrasso, T., and Vaiana, N. (2022c). Preliminary investigation of aging effects on recycled rubber fiber reinforced bearings (rr-frbs). J. Earthq. Eng. 26, 5407–5424. doi:10.1080/13632469.2021.1871683
Masing, G., and Mauksch, W. (1926). “Über das verhalten von kalt gerecktem messing bei zug-und stauchbelastung,” in Wissenschaftliche Veröffentlichungen aus dem Siemens-Konzern (Springer), 142–155.
Mayergoyz, I. (1986). Mathematical models of hysteresis. IEEE Trans. Magn. 22, 603–608. doi:10.1109/tmag.1986.1064347
Menegotto, M., and Pinto, P. (1973). “Method of analysis for cyclically loaded r. c. plane frames including changes in geometry and non-elastic behavior of elements under combined normal force and bending,” in Proc.of IABSE Symposium on Resistance and Ultimate Deformability of Structures Acted on by Well Defined Repeated Loads, Lisbona, 15–22.
Ozdemir, H. (1976). Nonlinear transient dynamic analysis of yielding structures. Berkeley: University of California.
Pellecchia, D., Lo Feudo, S., Vaiana, N., Dion, J.-L., and Rosati, L. (2022). A procedure to model and design elastomeric-based isolation systems for the seismic protection of rocking art objects. Comput. aided. Civ. Eng. 37, 1298–1315. doi:10.1111/mice.12775
Ramberg, W., and Osgood, W. R. (1943). Description of stress-strain curves by three parameters. Tech. rep.
Sessa, S., Vaiana, N., Paradiso, M., and Rosati, L. (2020). An inverse identification strategy for the mechanical parameters of a phenomenological hysteretic constitutive model. Mech. Syst. Signal Process. 139, 106622. doi:10.1016/j.ymssp.2020.106622
Vaiana, N., and Rosati, L. (2023). Classification and unified phenomenological modeling of complex uniaxial rate-independent hysteretic responses. Mech. Syst. Signal Process. 182, 109539. doi:10.1016/j.ymssp.2022.109539
Vaiana, N., Sessa, S., Marmo, F., and Rosati, L. (2018). A class of uniaxial phenomenological models for simulating hysteretic phenomena in rate-independent mechanical systems and materials. Nonlinear Dyn. 93, 1647–1669. doi:10.1007/s11071-018-4282-2
Vaiana, N., Sessa, S., Marmo, F., and Rosati, L. (2019a). An accurate and computationally efficient uniaxial phenomenological model for steel and fiber reinforced elastomeric bearings. Compos. Struct. 211, 196–212. doi:10.1016/j.compstruct.2018.12.017
Vaiana, N., Sessa, S., Paradiso, M., Marmo, F., and Rosati, L. (2019b). “An efficient computational strategy for nonlinear time history analysis of seismically base-isolated structures,” in Conference of the Italian association of theoretical and applied Mechanics (Springer), 1340–1353. doi:10.1007/978-3-030-41057-5_108
Vaiana, N., Marmo, F., Sessa, S., and Rosati, L. (2020). “Modeling of the hysteretic behavior of wire rope isolators using a novel rate-independent model,” in Nonlinear dynamics of structures, systems and devices (Springer), 309–317. doi:10.1007/978-3-030-34713-0_31
Vaiana, N., Capuano, R., Sessa, S., Marmo, F., and Rosati, L. (2021a). Nonlinear dynamic analysis of seismically base-isolated structures by a novel opensees hysteretic material model. Appl. Sci. 11, 900. doi:10.3390/app11030900
Vaiana, N., Sessa, S., and Rosati, L. (2021b). A generalized class of uniaxial rate-independent models for simulating asymmetric mechanical hysteresis phenomena. Mech. Syst. Signal Process. 146, 106984. doi:10.1016/j.ymssp.2020.106984
Visintin, A. (2013). Differential models of hysteresis, 111. Berlin, Heidelberg: Springer Science & Business Media.
Wen, Y.-K. (1976). Method for random vibration of hysteretic systems. J. Engrg. Mech. Div. 102, 249–263. doi:10.1061/jmcea3.0002106
Keywords: phenomenological models, hysteresis, structural dynamics, structural mechanics, structural engineering
Citation: Capuano R, Fraddosio A and Piccioni MD (2022) Phenomenological rate-independent uniaxial hysteretic models: A mini-review. Front. Built Environ. 8:1048533. doi: 10.3389/fbuil.2022.1048533
Received: 19 September 2022; Accepted: 26 October 2022;
Published: 14 November 2022.
Edited by:
Yongjia Xu, Tsinghua University, ChinaReviewed by:
Gabriele Milani, Politecnico di Milano, ItalyCopyright © 2022 Capuano, Fraddosio and Piccioni. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Raffaele Capuano, cmFmZmFlbGUuY2FwdWFub0B1bmluYS5pdA==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.