 Zhang Yi
Zhang Yi Zhou Yangkun1
Zhou Yangkun1- 1College of Electrical and Computer Science, Jilin Jianzhu University, Changchun, China
- 2Information Center of the Ministry of Natural Resources, Beijing, China
This paper presents an improved Discrete Salp Swarm Algorithm based on the Ant Colony System (DSSACS). Firstly, we use the Ant Colony System (ACS) to optimize the initialization of the salp colony and discretize the algorithm, then use the crossover operator and mutation operator to simulate the foraging behavior of the followers in the salp colony. We tested DSSACS with several algorithms on the TSP dataset. For TSP files of different sizes, the error of DSSACS is generally between 0.78% and 2.95%, while other algorithms are generally higher than 2.03%, or even 6.43%. The experiments show that our algorithm has a faster convergence speed, better positive feedback mechanism, and higher accuracy. We also apply the new algorithm for the Wireless rechargeable sensor network (WRSN) problem. For the selection of the optimal path, the path selected by DSSACS is always about 20% shorter than the path selected by ACS. Results show that DSSACS has obvious advantages over other algorithms in MCV’s multi-path planning and saves more time and economic cost than other swarm intelligence algorithms in the wireless rechargeable sensor network.
1 Introduction
In recent years, meta-heuristic techniques have solved many problems with the rapid development of meta-heuristic algorithms (Zhang et al., 2018). There are two main reasons why meta-heuristic algorithms can be competitive with practical problems such as single-objective and multi-objective optimization problems (Cui et al., 2021a). Firstly, people used mathematical methods to solve practical problems before the proposed meta-heuristic optimization technology. However, practical issues are usually continuous or discrete. Some issues may also have certain constraints (Abbassi et al., 2019). Secondly, a new method is urgently being created because the determinism of traditional mathematical methods often leads to inefficiencies in solving practical problems, then the metaheuristic algorithm was invented which shows advantages of flexibility and universality faced with many large-scale multi-modal, discontinuous, and non-differentiable issues in the real world, thus can avoid falling into local optimum and can be widely used and applied to various scientific problems (Mirjalili and Lewis, 2016).
Meta-heuristic algorithms can be divided into two categories. One is the evolutionary algorithm such as the Genetic Algorithm (GA) (Chatterjee et al., 1996), one of many people’s most fundamental algorithms and is considered an evolutionary algorithm. GA uses the newly generated population to replace the old population to accomplish the evolution of the population. The evolutionary algorithm also includes Memetic Algorithm (MA) (Pablo, 1989), Multi-Objective Evolutionary Algorithm (MOEA) (Deb et al., 2002), etc. An evolutionary algorithm is a mature global optimization (Nedjah et al., 2021) method with high robustness and is widely applicable, which has the characteristics of self-organization, self-adaptation, and self-learning. It can effectively deal with complex problems that are difficult to be solved by traditional optimization algorithms (such as NP-hard optimization problems (Zhang et al., 2022)) without being limited by the characteristics of the issues. The other is the swarm intelligence algorithm. Scientists have studied the group behavior of organisms in nature by using bionic technology to simulate the social behavior of biological populations. As a result, they found that the simulated algorithm can solve practical problems, such as the Ant colony algorithm (Ant Colony Optimization, ACO) (Dorigo and Di Caro, 1999), which is created by studying the cooperative foraging behavior of ants, and Cuckoo search (CS), a Swarm intelligence algorithm that can solve multi-objective optimization problems (Cui et al., 2019a).
The swarm intelligence algorithm is simple to be implemented with no centralized control constraints (Cui et al., 2019b). And it will not be affected by individual failures, which can influence the solution of the entire problem. Swarm intelligence algorithms are generally used for two purposes. One is to solve persistent problems, and the other is to solve discrete problems. The swarm intelligence algorithms that are used to solve continuous problems include Artificial Bee Colony (ABC) (Karaboga and Basturk, 2008), Whale Optimization Algorithm (WOA) (Mafarja and Mirjalili, 2017), Grey Wolf Optimizer (GWO) (Mirjalili et al., 2014; Sivaramakrishnan et al., 2020), Salp Swarm Algorithm (SSA) (Mirjalili et al., 2017), etc. These algorithms are generally used for the optimization of specific functions. The standard swarm intelligence algorithms for solving discrete problems include the ant colony algorithm (ACO) and discrete particle swarm algorithm (PSO). These algorithms are used to solve combinatorial optimization problems such as TSP (Traveling Salesman Problem) and vehicle routing problems (VRP).
Swarm intelligence algorithms have excellent applicability and plasticity. The improved swarm intelligence algorithm will perform better. For example, if quantum computing is introduced into the monarch butterfly optimization (MBO), the monarch butterfly can find a shorter path (Yi et al., 2020). Scientists have discovered that many swarm intelligence algorithms can solve persistent problems and have the potential to solve discrete problems. Particle Swarm Optimization (PSO) (Eberhart and Kennedy, 1995) is an algorithm created by imitating the social behavior of geese, and it has been proved its excellent role in the field of continuous problems for a long time ago. Its excellent applicability is often improved in other fields such as medicine (Zemmal et al., 2021). TSP (Traveling Salesman Problem) is a classic combinatorial optimization problem with the characteristic of NP-hard and discrete (Bellman, 1962; Bellmore and Nemhauser, 1968). In optimizing the outlier scores,Sharon Femi and Ganesh Vaidyanathan. (2022) used chicken swarm optimization (CSO) to increase the deviation between the outliers and inliers according to the chicken competition. Wang et al. (2003) designed a discrete particle swarm optimization algorithm with a faster convergence speed using exchange operators and exchange sequences (Shi et al., 2007). Fei et al. (2014) improved the Artificial Fish Swarm Algorithm (AFSA) created by Li, which was used to research TSP problems in faster early convergence speed and quicker local optimum found.
The research in this paper focuses on discretization improvement and optimization of the salp swarm algorithm (SSA). SSA is a new swarm intelligence algorithm proposed by Mirjalili et al. (2017), based on the swarm foraging behavior of salps in the ocean. tested their algorithm in single-objective and multi-objective optimization problems, and the salp swarm algorithm showed high convergence and strong searchability. More importantly, for high-dimensional data, SSA also outperforms (Cui et al., 2021b). In addition, it is also suitable for the application of wings and ship propellers. At present, SSA is applied to various cases and problems, such as workshop scheduling problems (Liu et al., 2022), wireless sensor network (WSN) positioning problems (Kanoosh et al., 2019), grid distributed power optimization problems (Pantoja and Quijano, 2011), and multi-level threshold Image segmentation problems (Abualigah et al., 2022) et al. Our experiments show that the unique chain structure of SSA has a positive effect on improving the convergence speed and accuracy of the algorithm, and SSA is easy to be transformed, and the transformed algorithm has great advantages in solving discrete problems.
Moreover, SSA has excellent advantages in optimizing single, multi-modal, and composite benchmark functions. However, the salp swarm algorithm also has shortcomings (Faris et al., 2018). The salp swarm algorithm has low search accuracy and slow convergence speed and quickly falls into the local optimum. Because the initial population of the salp swarm algorithm is randomly formed, there is a lack of correlation between the populations and the overall lack of purpose. Therefore, the convergence speed and stability in the early search stage are not brilliant.
This paper proposes an improved salp swarm discrete algorithm based on the ant colony system (DSSACS). Firstly, the crossover and mutation operators are introduced to make SSA suitable for discrete problems. The pheromone matrix is used to initialize the salp population to make the leaders more purposeful and improve the relevance of leaders and followers. The ant colony system is so mature that many algorithms reference it (Deng et al., 2020; Zhang et al., 2020). Moreover, it can promote early search efficiency. DSSACS has a faster convergence speed and higher solution accuracy compared with ACO. The new algorithm is suitable for discrete problems, and its efficiency is improved significantly. We apply the improved algorithm in TSP problems and get an efficient result. (DSSACS is superior to other swarm intelligence algorithms in terms of stability and convergence speed. In TSP datasets with different numbers of cities, DSSACS has better performance than other algorithms).
However, the effectiveness of an algorithm in solving a set of problems does not guarantee its success in a different stage of the issue. Consequently, we apply the improved algorithm in wireless rechargeable sensor networks. The point of wireless rechargeable sensor networks (Fu et al., 2016) is a new scientific research topic. It originated from a technology proposed by Kurs et al. (2007). The main content is magnetic resonance coupling technology to achieve remote contactless charging, wireless charging. It is necessary to have a wireless charging device to charge the wireless sensor remotely (Cheon et al., 2011) in order to make the wireless sensor network running permanently or have a longer life cycle. Xie et al. (2012) found that if a wireless charging vehicle (WCV) is used to assess the wireless sensor network, after a while, the wireless rechargeable sensor network will form a dynamic balance, which keeps the WRSN in the running state forever. Research on this goes far beyond that. Scientists began to study the mathematical model of WRSN in the case of multiple charging vehicles or mobile chargers, constrain the capacity or the rate of MCs (Dai et al., 2014; Shu et al., 2016), plan the paths of various MCs, and obtain a scheme with the minimum moving distance of multiple MCs (Xu et al., 2014). Swarm intelligence algorithms also have made extraordinary contributions in this field. The improved firefly algorithm (IFA) is a swarm intelligence algorithm. Sun et al. (2017), Yang et al. (2018) used IFA to deploy the wireless charging nodes (WCNs) of the WRSN reasonably, then made the efficiency and the Coverage of is maximized at the same time. (Chen and Jiang, 2016) applied the particle swarm algorithm (PSO) to the deployment of chargers in WRSN. They optimized the swarm intelligence into the charger’s location and even the direction of the antenna. Lyu et al. (2019) proposed a hybrid particle swarm optimization genetic algorithm (HPSOGA), and they used the limited energy of the charging device as a constraint. The improved swarm intelligence algorithm was used to ensure the periodic change of charging. Feng et al. (2020) used newborn particle swarm optimization (NPSO) to add nascent particles to the swarm to optimize the charging scheduling of WRSN. Finally, they found that NPSO improved energy utilization and reduced the mortality of nodes. It can be seen that the swarm intelligence algorithm plays an essential role in the study of the WRSN problem. However, few people apply the swarm intelligence algorithm to MCV charging path planning in WRSN. Generally speaking, good charging path planning can primarily reduce the cost of time and money. Therefore, this paper studied a WRSN mathematical model with multiple traveling salesman problems (MTSP) in the case of numerous MC/MCV and used DSSACS for optimization.
The structure of this paper is as follows: In Section 2, the basic concepts of the TSP problem, MTSP problem, and WRSN problem are described, the WRSN model is established, and the problems and calculation formula we need to solve are described. In Section 3, we describe the idea of improving the salp swarm algorithm (SSA), propose a new algorithm——the ant-colony-system-based salp discrete optimization algorithm, and explain the parameter selection for our algorithm to solve NP-hard problems. In Section 4, we conducted experiments. Firstly, we applied DSSACS to the WRSN problem to obtain the results and compared it with other algorithms. Then we reached the DSSACS algorithm with different algorithms on multiple TSP problems. Section V is the conclusion of our work.
2 Problem description
We established the mathematical model of WRSN in 2.1, introduced the concept of MTSP in section 2.2.
2.1 Wireless rechargeable sensor network model
WRSN model is a mathematical model based on the two-dimensional plane. WRSN consists of a fixed transmission station (BS), wireless rechargeable sensors, and n mobile charging vehicles (MCVS). The base station does not move and exchanges data with wireless sensors—the base station is typically located in the general center of a wireless rechargeable network. If one of the wireless sensors fails or the power level falls below the sensor’s minimum threshold, the entire WRSN will fail. Wireless sensors need to be periodically charged using a mobile charger (MC) (Liang et al., 2014) to make WRSN permanent. The most common MC is MCV. MCV starts from BS and successfully captures multiple wireless sensor nodes in a charging cycle. After completing the charging task, MCV returns to BS for its charging. MCVs will not interfere with each other during their own charge cycle. Multiple MCVS working together on charging commissions can turn the entire process into an MTSP problem. The WRSN charging problem can be represented in Figure 1. The MTSP is meaningless if there are no constraints for multi-MCV charging WRSN networks. Moreover, only the WRSN model with constraints can approach the problem (Pan and Wang, 2006). This paper studies specific power consumption rates and the total battery capacity of the wireless sensors in WRSN. Each MCV is assigned charging tasks as evenly as possible to calculate the absolute minimum operating distance after completing a cycle task to minimize the maximum battery capacity of the sensor in the network.
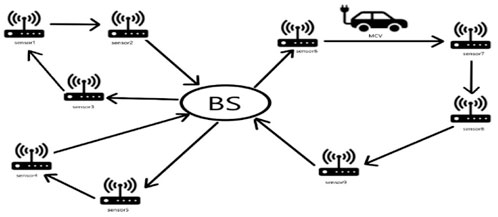
FIGURE 1. The Schematic diagram of WRSN.
Suppose all wireless sensor nodes
We first deal with the case that a single MCV charges WRSN. It can be simply seen as a TSP problem. At a given speed, the charging cycle and the running distance of MCV have the following relationship:
Where
It can be seen that when the whole WRSN system reaches the steady state, the maximum battery capacity in the sensor network can be calculated at
2.2 Multi-travel salesman problem
Traveling Salesman Problem (TSP) is the most typed problem in combinatorial optimization. TSP refers to making the shortest. Total distance when the salesman starts from the starting point to sell goods in all cities and finally back to the starting point. This problem is an entirely undirected graph with weight, in which a Hamilton cycle with the lowest weight is found. Let
To meet all kinds of specific requirements, put forward the multi-travel salesman problem (MTSP). MTSP is a particular case of TSP, is the extension and extension of TSP. The MTSP problem can be expressed as follows: m salesmen are going to n cities to sell their products. They start from the same starting point and return to the same starting point at the end of a travel cycle. The goal is to find the minimum sum of the distances traveled by all the salesmen. It can be expressed as follows:
First of all, it is the combination of multiple TSP problems and requires a variety of constraints, otherwise, the results obtained are not practical. Secondly, MTSP problems have high complexity, so we use the DSSACS algorithm to solve them. Experiments show that DSSACS have significant advantages in MTSP optimization.
3 Algorithm improvement
In this sections, We established the principle of the salp swarm algorithm in 3.1, introduced Ant Colony System in Section 3.2, and introduced the improved algorithm DSSACS in Section 3.3.
3.1 The principle of the salp swarm algorithm
The Salp Swarm Algorithm is a brand algorithm proposed by Mirjalili et al. (2017). The Algorithm simulates the social behavior of salps during foraging. Mirjalili divided salps into two groups, leaders and followers. As we all know, different from other biological groups, the salps group forms a chain when foraging for food, the salps are connected end to end, and the salps in the first half of the chain, we call them leaders, they are responsible for finding food sources and guiding the salps in the back. The remaining salps are defined as followers. The followers follow closely, and each follower follows the previous follower or leader, so a chain structure is simulated. The Salp Swarm Algorithm searches in an n-dimensional search space, and each salp stores the search results in an n-dimensional vector, denoted as
The position update formula for the leader is as follows:
Eq. 2.1 represents the position update formula of the salps leader in the
In the formula,
The follower’s position update formula utilizes Newton’s kinematics formula, which is as follows:
In the formula,
Algorithm 1. 1: initialize population and define ubj and lbj
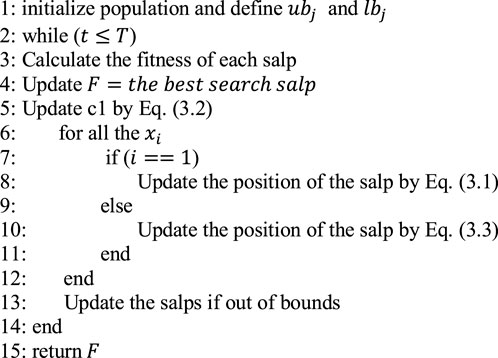
The SSA has many advantages in solving continuous problems. The SSA is a swarm intelligence algorithm that constantly develops and uses space and first has a high space utilization rate. It can effectively avoid falling into an optimal local solution, partly due to the delicate design of the coefficient
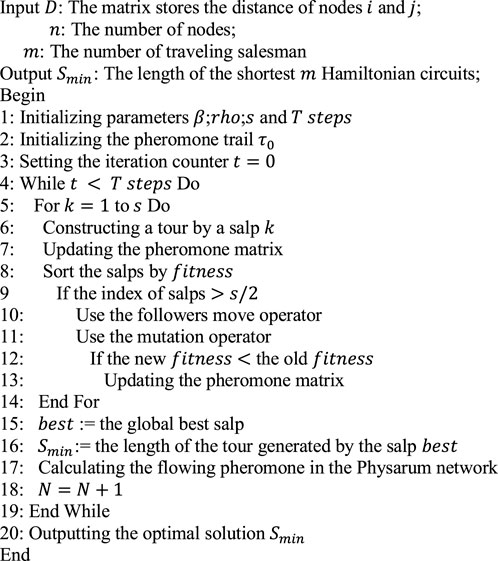
3.2 Discrete Salp Swarm Algorithm based on the Ant Colony System
In the TSP problem, the ant colony system has a mature system. The ants are randomly assigned to the city initially, and the ants choose the next city according to the pheromone probability on the road. The more the ants’ walkthrough, the more pheromone accumulates. If there are more ants, the probability that the following ants will choose this path is higher than others. Under this positive feedback mechanism, the shortest route will be traversed by more and more ants (Yang et al., 2008). After studying the path planning of the ant colony system, it is found that ACS has some inspiration for the population initialization of SSA. The specific process of the ant colony algorithm is described below.
There are
Where
Obviously, an ant traveled all the cities and formed a critical path after
It can be seen from the formula that the concentration of pheromone left by the ants on the path is proportional to
Although many algorithms can perform approximate solutions in solving NP-Hard problems, there are generally problems of low search efficiency and easy to fall into local optimal solutions (Mohan and Remya, 2014; Saenphon et al., 2019). This paper improved the salp swarm group algorithm for the first time and applied it to the resolution of discrete problems. Therefore, in the next section, we propose a novel SSA to solve the MTSP problem.
First, initialize the population of
The salp colony uses equations 2.4 to (2.7) to perform probability selection and pheromone matrix update, similar to the ant colony system. The more important thing is that the pheromone heuristic factor
DSSACS focuses more on exploring the search space in the early iteration stage and not sticking to local optimization; in the later stage of the algorithm, the salps colony pays more attention to local development and mining the optimal solution.
When calculating the transition probability in 3.3.2, it is assumed that the probability of ant
The roulette will rotate n times, and a random number ψ∈ (0, 1) is generated each time. When ψ satisfies the following formula, city j will be selected.
Where the number of cities is
0 represents the starting point, and the rest of the cities should satisfy
If the coordinates of two cities are
The calculated
The fitness of the path stored by a salp is calculated by Eqs 1.8, 1.9. The smaller the fitness value, the better the effect.
First, the operator will re-encode the path information stored by the followers. For this salp as represented by Eq. 2.12, its path will be re-integrated as:
After sorting, the salps in the second half will be crossed with the previously coded salps, assuming that the two salps are
At this time, two random numbers
According to the rules of cross-transformation,
Every crossover will generate several new sequences, and each sequence will be decoded as (2.12), and use the fitness calculation method of 3.3.5 to compare the fitness. If the effect of the salps after moving is better than before, then this movement will be preserved.
In this paper, the mutation operator is added at the end of the algorithm, improving the search space and preventing falling into the local optimum. First, choose a salp, such as the
Then flip
Algorithm 2. initialize population and define ubj and lbj
4 The experiment
The experiment environment is as follows: The operating system is Windows 11, CPU is AMD Ryzen 7 4700U and Inter I7-10700, memory is 16 GB. In order to test our algorithm DSSACS, we compared multiple data sets and algorithms from the TSPLIB database (HTTP://www.iwr.Uni-heidelberg.de/groups/comopt/software/TSPLIB95), and the results show that our algorithm has better performance.
We compared DSSACS with other algorithms, including genetic algorithm (GA), Ant colony algorithm (ACO), Min-Max Ant System (MMAS) (Yelmewad et al., 2019), GA-PSO-ACO (Deng et al., 2012), Tabu Search algorithm,ACO-ABC algorithm (Gündüz et al., 2015), Fast Opposite Gradient Search with Ant Colony Optimization (FOGS-ACO) algorithm (Saenphon et al., 2014), Discrete Spider Monkey Optimization (DSMO) (Akhand et al., 2020). For all TSP problems, Euclidean distance is used to quantify the effect of the algorithm. We considered the following TSP issues: Dantzig42, Att48, Eil51, Berlin52, St70, Eil76, Rat99, Rd100, etc. Part of the experimental data came from the report of Thirachit Saenphon et al. (2014), and part of the data came from the results of our operation. In terms of the gap between the final solution and the optimal value and algorithm convergence performance over time, DSSACS has obvious advantages and fast convergence speed. In addition to the performance standards of the calibration algorithm proposed in (4.4) and (4.5), a function designed based on the chi-square calibration idea -- Average deviation Rate (AVR) is also proposed in this section. Calculating the formula for
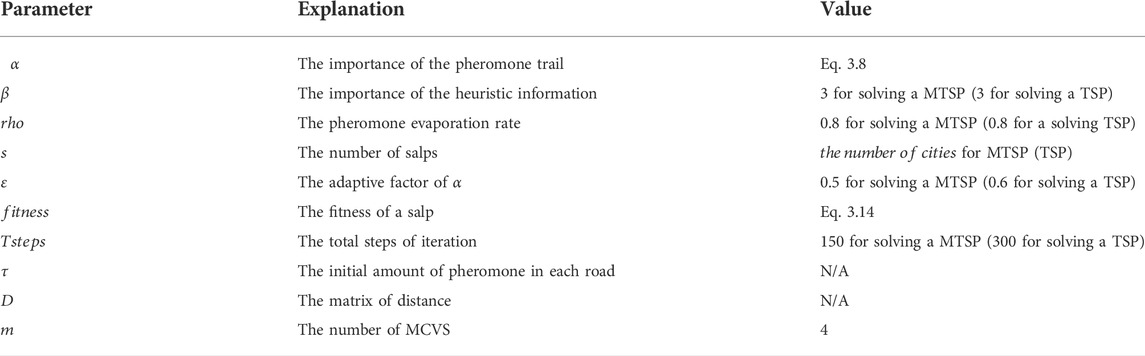
TABLE 1. The parameters of the problem.
Firstly, our algorithm finds the optimal path for handling TSP problems, including Att48, Eil51, Berlin52, St70, Eil76, and Rd100. In Figure 2, we describe the optimal path graph searched by SDACS with enough iterations, and the serial number of cities is given in the Figure. DSSACS can find the optimal path in most TSP problems by our algorithm. Our algorithm can obtain the approximate optimal path, indicating that it has strong applicability and computing power in different TSP problems.
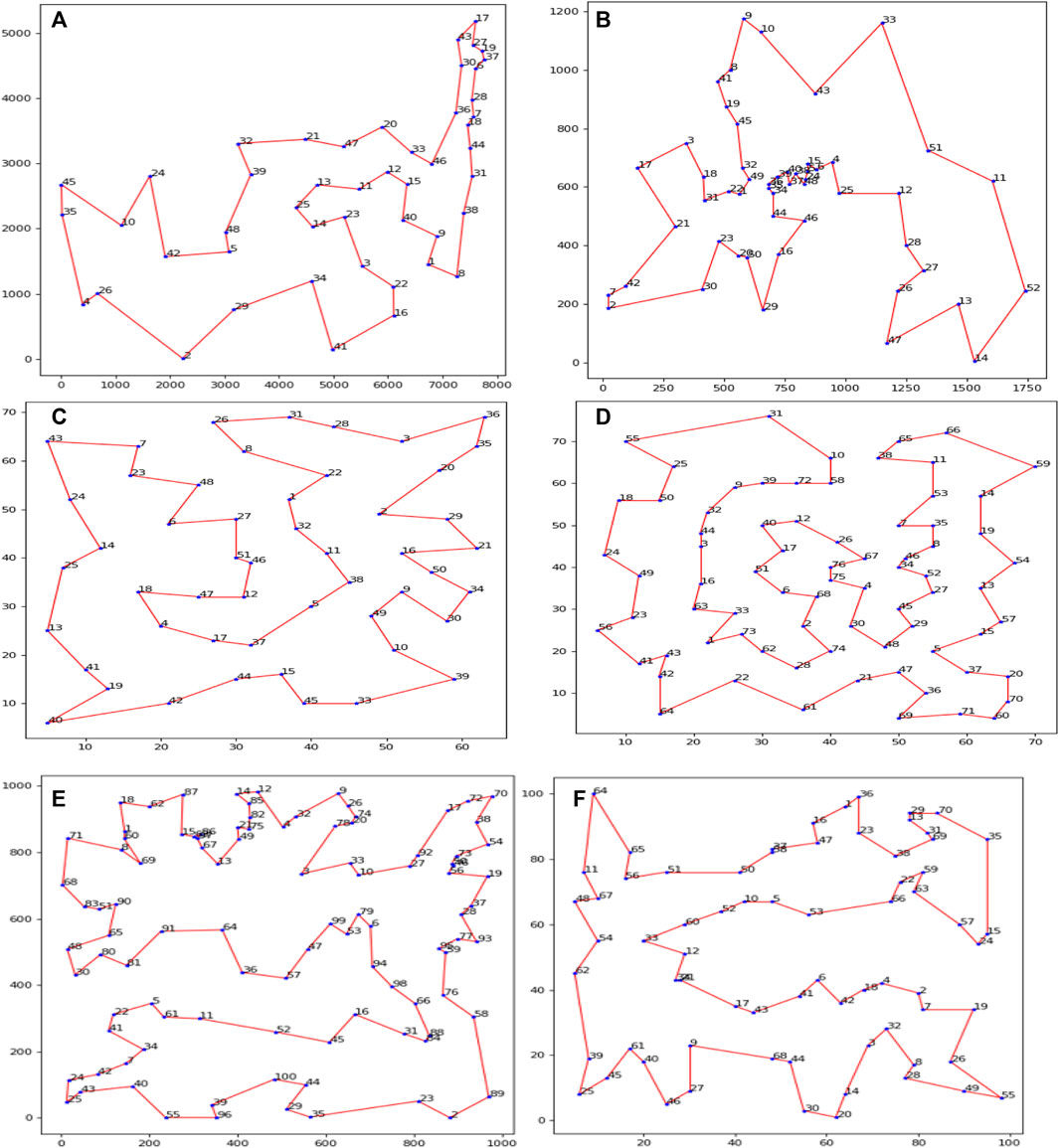
FIGURE 2. Some of the best routes generated by our algorithm (A) Att48, (B) Berlin52,(C) Eil51,(D) Eil76,(E) Rd100, (F) St70.
In Figures 3–8, we draw the operation diagram of DSSACS together with ACO, GA, and MMAS. These figures depict the change of
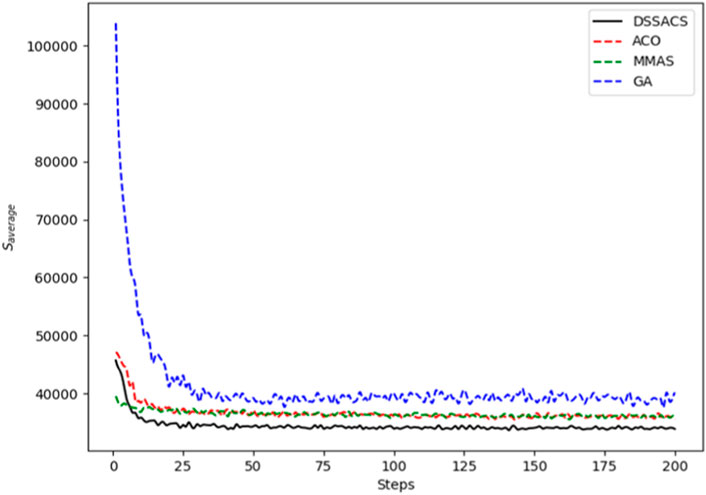
FIGURE 3. Att48.

FIGURE 4. Berlin52.
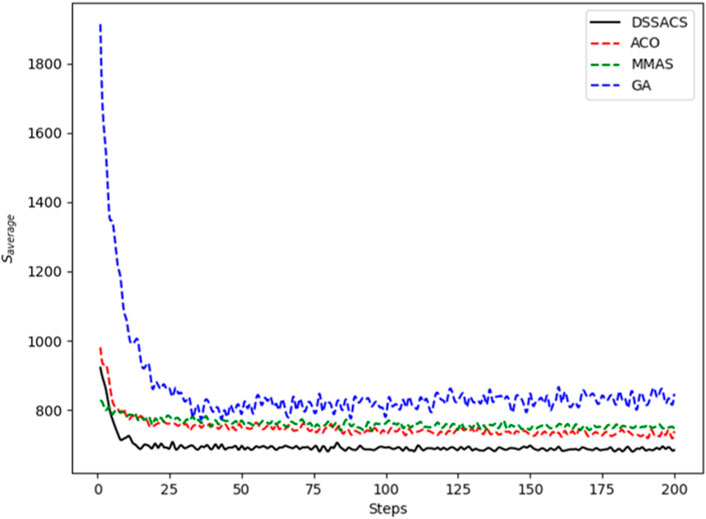
FIGURE 5. Dantzig42.

FIGURE 6. Eil51.
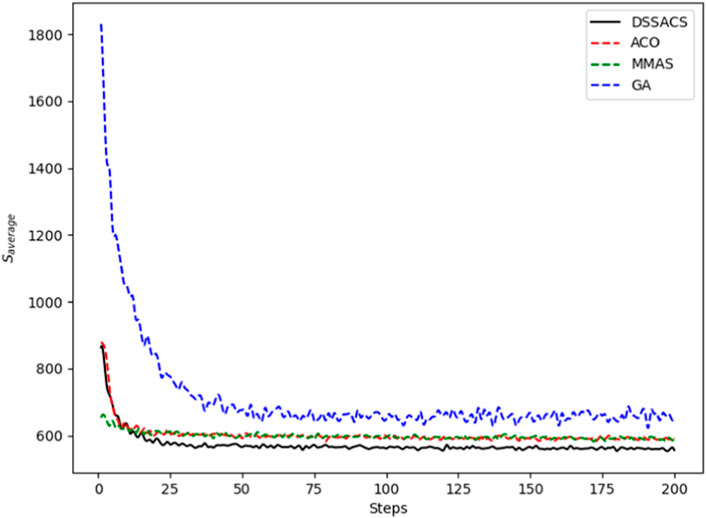
FIGURE 7. Eil76.
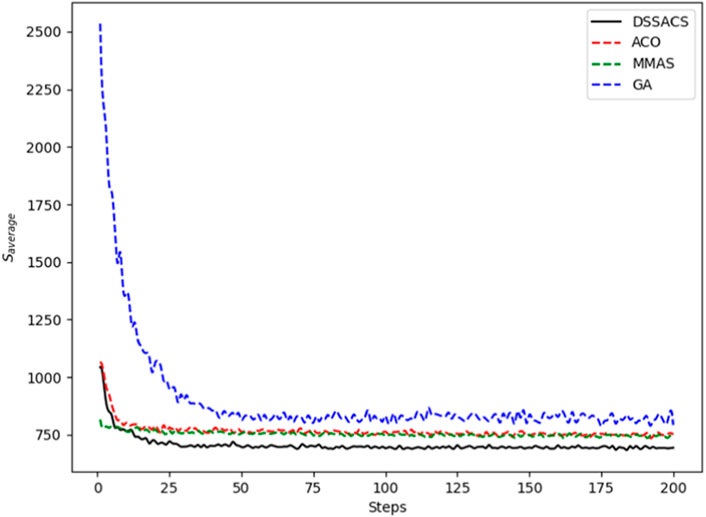
FIGURE 8. St70.
The average variation curves of optimal solutions obtained by the four algorithms in the process of iteration can be seen. The decline of DSSACS is more obvious than ACO, GA, and MMAS, and the convergence rate is faster. In the early stage, the average value of DSSACS is lower than the other three functions, and with the increase in step size, the average value of DSSACS is also lower than ACO, GA, and MMAS. Compared with the other three algorithms, DSSACS has a faster convergence speed and higher solution quality, and a more excellent positive feedback mechanism. Compared with other ant colony algorithms, in the change of the maximum number of iterations, the optimal solution can always be 5%–6% lower than them, and compared with the genetic algorithm, this value can reach 15%–20%. DSSACS had a much higher search accuracy than other swarm intelligence algorithms. In our subsequent experiments, the algorithms corresponding to each TSP problem, such as DSSACS, GA, GA-PSO-ACO, etc., were averaged for 30 experiments to ensure the reliability of experimental data and their maximum iterations were set as 500 times each time. Table 2 summarizes the performance of each algorithm on the TSP problem. The optimal result represents the optimal distance obtained from TSPLIB, the best result represents the optimal value that an algorithm can obtain in 30 experiments, and the Average represents the average results over 30 times. Standard deviation means standard deviation of results, and AVR means average deviation rate.
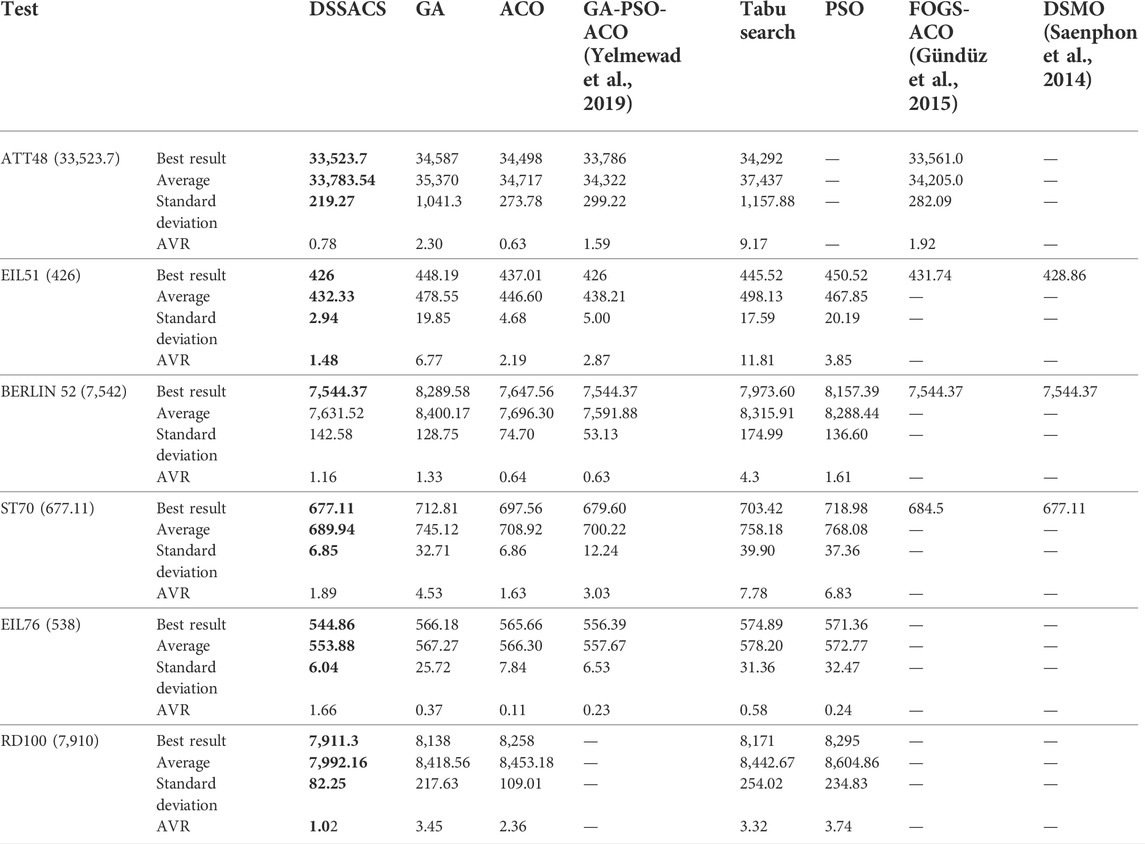
TABLE 2. The comparison results of algorithms. (If the result of DSSACS is better than other algorithms, it will be marked in bold).
The optimal solution of the DSSACS algorithm is superior to other algorithms is shown in Table2. The four indexes of DSSACS in Best result, Average, Standard deviation, and AVR show a great advantage. DSSACS can generally achieve the official optimal solution. For the TSP data sets, its average error is between 0.78% and 2.95% compared to the official optimal solution, while for other algorithms, the error is generally 2.03%–6.43%. DSSACS and GA-PSO-ACO achieved the same lowest optimal value in the case of EIL51. However, DSSACS is more stable than GA-PSO-ACO in the whole 30 calculation process, and it was easier to obtain the optimal solution. In EIL76, although DSSACS is more unstable than other algorithms, only DSSACS found the lowest optimal solution and the lowest average value in the same number of iterations, indicating that our algorithm can generally obtain the optimal solution.In general, DSSACS have faster convergence speed and higher solution quality.
We used the 2020 Shenzhen Cup Mathematical Modeling Competition1, as shown in Table 3. Point 0 is the base station in this system, where multiple wireless sensors collect data from the environment and send it to the data center of the base station. When the sensor’s power is lower than a certain threshold, the sensor cannot complete the regular sending and receiving tasks, and the WRSN network breaks down. The mobile charger needs to charge the sensor periodically to keep it from falling below the threshold for the WRSN to work correctly. The mobile charger starts from the data center and passes through each sensor at a fixed rate, charging the sensor at a fixed rate until it returns to the base station after charging all the sensors. Each sensor has a specific rate of energy consumption. The energy consumption of a mobile charger mainly has two aspects: one is the standard energy consumption caused by the charging sensor node; The other is the energy consumption of moving the charger on its way to charge the sensor. In order to reduce the energy consumption of mobile chargers on the road, it is necessary to plan the charging route of mobile chargers reasonably.
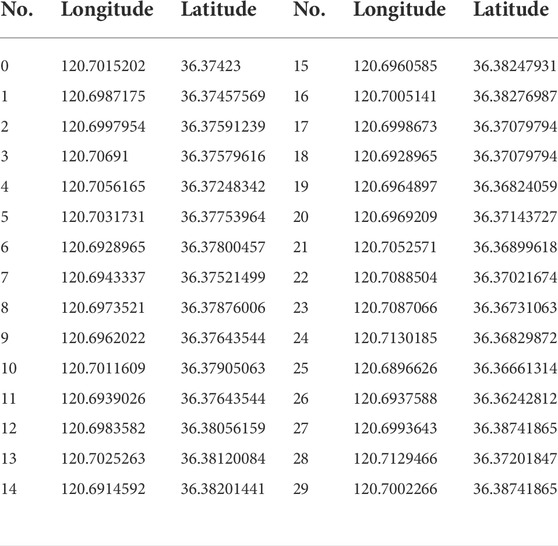
TABLE 3. Sensor coordinate dataset in WRSN.
First, the longitude and latitude of each sensor and base station have been informed in the link. First, we assume that the longitude and precision of sensor A are
First, we give a few measures and their definitions.
1)
2)
3)
1) The moving speed of the MCV is
2) The charging rate of the MCV is R = 400 mA/h
3) The lowest battery capacity of the sensor w = 7.3 mA
4) The number of MCVS, m = 4
First, the optimal solution is 13.697 km under the maximum number of 300 iterations shown in Figure 9. The DSSACS has a high convergence speed compared with ACO, while DSSACS can be completed in the early iteration. Moreover, the ACO is not as good as DSSACS in some image details. It is longer than SSDACD in overall path length, leading to increased wireless sensor battery capacity and high cost.
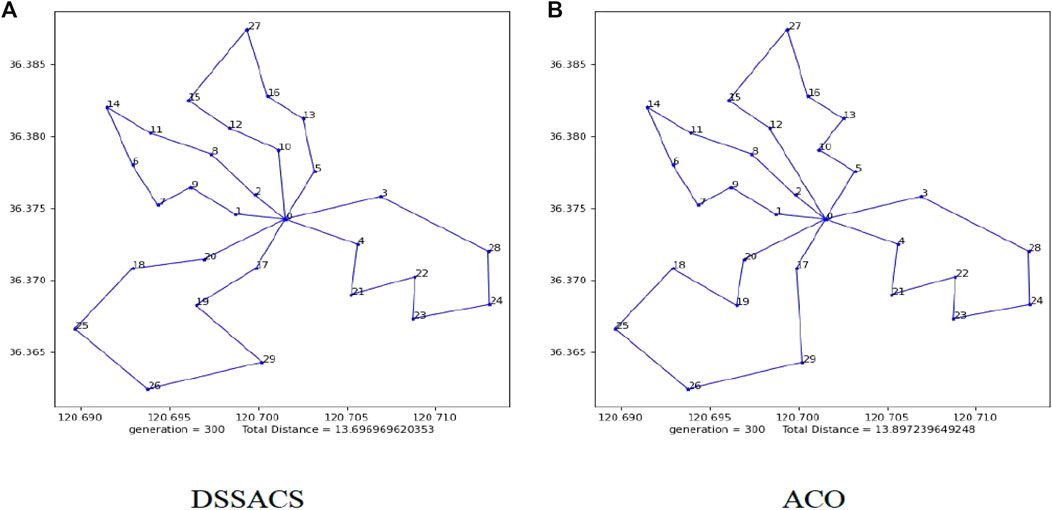
FIGURE 9. Paths of DSSACS (A) and ACO (B).
In Figure 10, the change of
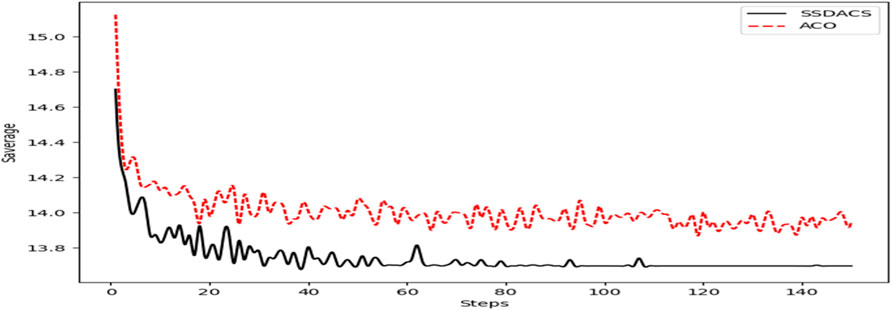
FIGURE 10. The comparison of the convergence process of
In Figure 11, we plotted the change of

FIGURE 11. The comparison of
Finally, we compared the change of
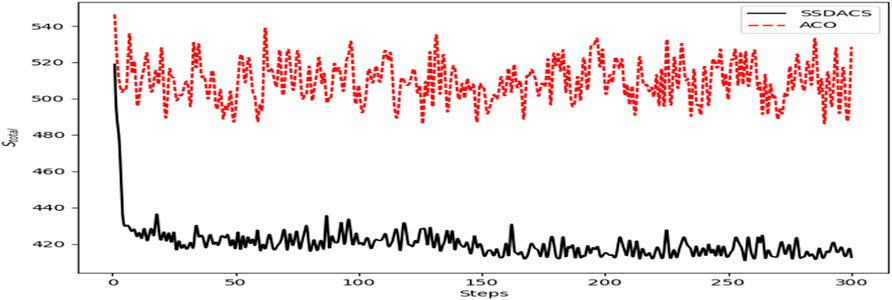
FIGURE 12. The comparison of the reflection of positive feedback mechanism (
According to Eqs 2.1.–.2.7, the maximum battery capacity obtained by using DSSACS
:
:
:
:
5 Summary and outlook
This paper proposes a discrete optimization strategy for Salps based on the ant colony system. Our optimized DSSACS algorithm is applied to solve the application of the TSP problem and MTSP problem. We added the advantage of population initialization from the ant colony system to the leader of the salp colony system to solve the problem of the disorder and confusion in the initialization of the salp swarm algorithm. Thus, significantly improving the correlation and purpose between the population and optimizing the follower strategy of the salp colony to improve the convergence speed of the algorithm. We first apply DSSACS to the MCV path planning problem of WRSN networks. The charging problem of WRSN networks can be regarded as an MTSP problem. DSSACS can improve the algorithm’s calculation speed, save time and economic cost of the WRSN network by planning the path. DSSACS surpasses the ACO algorithm in terms of stability, convergence speed, and accuracy in terms of overall performance. Then we compare DSSACS with other metaheuristic algorithms on the TSP problem. The optimal and average solutions obtained by DSSACS are superior to other algorithms, and the SSACS algorithm is almost the best in convergence speed, robustness, and positive feedback mechanism. Our experiments show that DSSACS is feasible and effective in solving NP-hard problems. Although the algorithm proposed in this paper has a significant improvement compared to the original algorithm, it is only used in the field of wireless charging in this paper. It is believed that through the potential of DSSACS, it can break through the barriers in other fields and play a role in other fields in the future.
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Author contributions
ZY: Conceptualization, Methodology; ZY: Validation, Software, Writing—Original Draft; YH: Software, Validation; WH: Verified, Writing—Review and Editing, Supervision.
Funding
This work is supported by the fund of the education department of Jilin province No. JJKH20210257KJ, JJKH20210257KJ, the fund of the Science and Technology Development Project of Jilin Province No. 20220203190SF.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
1http://www.m2ct.org/viewpage.jsp?editId=12&uri=0D00233&gobackUrl=modulalist.jsp&pageType=smxly&menuType=flowUp1, 2020.
References
Abbassi, R., Abbassi, A., Heidari, A. A., and Mirjalili, S. (2019). An efficient salp swarm-inspired algorithm for parameters identification of photovoltaic cell models. Energy Convers. Manag. 179, 362–372. doi:10.1016/j.enconman.2018.10.069
Abualigah, L., Al-Okbi, N. K., Abd Elaziz, M., and Houssein, E. H. (2022). Boosting marine predators algorithm by salp swarm algorithm for multilevel thresholding image segmentation. Multimed. Tools Appl. 81 (12), 16707–16742. doi:10.1007/s11042-022-12001-3
Akhand, M. A. H., Islam Ayon, S., Shahriyar, S. A., Siddique, N., and Adeli, H. (2020). Discrete spider Monkey optimization for travelling salesman problem. Appl. Soft Comput. 86, 105887. doi:10.1016/j.asoc.2019.105887
Bellman, R. (1962). Dynamic programming treatment of the travelling salesman problem. J. ACM (JACM) 9 (1), 61–63. doi:10.1145/321105.321111
Bellmore, M., and Nemhauser, G. L. (1968). The traveling salesman problem: A survey. Operations Res. 16 (3), 538–558. doi:10.1287/opre.16.3.538
Chatterjee, S., Carrera, C., and Lynch, L. A. (1996). Genetic algorithms and traveling salesman problems. Eur. J. Operational Res. 93 (3), 490–510. doi:10.1016/0377-2217(95)00077-1
Chen, Y. C., and Jiang, J. R. (2016). “Particle swarm optimization for charger deployment in wireless rechargeable sensor networks,” in 2016 26th International Telecommunication Networks and Applications Conference (ITNAC), Dunedin, New Zealand, 07-09 December 2016, 231–236.
Cheon, S., Kim, Y., Kang, S., Lee, M. L., Lee, J., and Zyung, T. (2011). Circuit-model-based analysis of a wireless energy-transfer system via coupled magnetic resonances. IEEE Trans. Ind. Electron. 58 (7), 2906–2914. doi:10.1109/tie.2010.2072893
Cui, Z., Zhang, J., Wang, Y., Cao, Y., Cai, X., Zhang, W., et al. (2019b). A pigeon-inspired optimization algorithm for many-objective optimization problems. Sci. China Inf. Sci. 62 (7), 70212. doi:10.1007/s11432-018-9729-5
Cui, Z., Zhang, M., Wang, H., Cai, X., and Zhang, W. (2019a). A hybrid many-objective cuckoo search algorithm. Soft Comput. 23 (21), 10681–10697. doi:10.1007/s00500-019-04004-4
Cui, Z., Zhang, Z., Hu, Z., Geng, S., and Chen, J. (2021b). A many-objective optimization based intelligent high performance data processing model for cyber-physical-social systems. IEEE Trans. Netw. Sci. Eng., 1. doi:10.1109/tnse.2021.3073911
Cui, Z., Zhao, P., Hu, Z., Cai, X., Zhang, W., and Chen, J. (2021a). An improved matrix factorization based model for many-objective optimization recommendation. Inf. Sci. 579, 1–14. doi:10.1016/j.ins.2021.07.077
Dai, H., Wu, X., Chen, G., Xu, L., and Lin, S. (2014). Minimizing the number of mobile chargers for large-scale wireless rechargeable sensor networks. Comput. Commun. 46, 54–65. doi:10.1016/j.comcom.2014.03.001
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T. (2002). A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 6 (2), 182–197. doi:10.1109/4235.996017
Deng, W., Chen, R., He, B., Liu, Y., Yin, L., and Guo, J. (2012). A novel two-stage hybrid swarm intelligence optimization algorithm and application. Soft Comput. 16 (10), 1707–1722. doi:10.1007/s00500-012-0855-z
Deng, W., Xu, J., Song, Y., and Zhao, H. (2020). An effective improved co-evolution ant colony optimisation algorithm with multi-strategies and its application. Int. J. Bio-Inspired Comput. 16 (3), 158–170. doi:10.1504/ijbic.2020.10033314
Dorigo, M., and Di Caro, G. (1999). “Ant colony optimization: A new meta-heuristic,” in Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 06-09 July 1999, 1470–1477.
Eberhart, R., and Kennedy, J. (1995). “A new optimizer using particle swarm theory,” in MHS'95. Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 04-06 October 1995, 39–43.
Faris, H., Mafarja, M. M., Heidari, A. A., Aljarah, I., Al-Zoubi, A. M., Mirjalili, S., et al. (2018). An efficient binary Salp Swarm Algorithm with crossover scheme for feature selection problems. Knowledge-Based Syst. 154, 43–67. doi:10.1016/j.knosys.2018.05.009
Fei, Teng, Zhang, Liyi, Yang, Li, Yang, Yulong, and Wang, F. (2014). “The artificial fish swarm algorithm to solve traveling salesman problem,” in Proceedings of international conference on computer science and information technology. Editors S. Patnaik, and X. Li (New Delhi: Springer India), 679–685.
Feng, Y., Zhang, W., Han, G., Kang, Y., and Wang, J. (2020). A newborn particle swarm optimization algorithm for charging-scheduling algorithm in industrial rechargeable sensor networks. IEEE Sens. J. 20 (18), 11014–11027. doi:10.1109/jsen.2020.2994113
Fu, L., Cheng, P., Gu, Y., Chen, J., and He, T. (2016). Optimal charging in wireless rechargeable sensor networks. IEEE Trans. Veh. Technol. 65 (1), 278–291. doi:10.1109/tvt.2015.2391119
Gündüz, M., Kiran, M. S., and Özceylan, E. (2015). A hierarchic approach based on swarm intelligence to solve the traveling salesman problem. Turk. J. Elec. Eng. Comp. Sci. 23 (1), 103–117. doi:10.3906/elk-1210-147
Kanoosh, H. M., Halim Houssein, E., and Selim, M. M. (2019). Salp swarm algorithm for node localization in wireless sensor networks. J. Comput. Netw. Commun. 2019, 1–12. doi:10.1155/2019/1028723
Karaboga, D., and Basturk, B. (2008). On the performance of artificial bee colony (ABC) algorithm. Appl. Soft Comput. 8 (1), 687–697. doi:10.1016/j.asoc.2007.05.007
Kurs, A., Karalis, A., Moffatt, R., Joannopoulos, J. D., Fisher, P., and Soljačić, M. (2007). Wireless power transfer via strongly coupled magnetic resonances. science 317 (5834), 83–86. doi:10.1126/science.1143254
Liang, W., Xu, W., Ren, X., Jia, X., and Lin, X. (2014). “Maintaining sensor networks perpetually via wireless recharging mobile vehicles,” in 39th Annual IEEE Conference on Local Computer Networks, Edmonton, AB, Canada, 08-11 September 2014, 270–278.
Liu, C., Yao, Y., and Zhu, H. (2022). Hybrid salp swarm algorithm for solving the green scheduling problem in a double-flexible job shop. Appl. Sci. 12 (1), 205. doi:10.3390/app12010205
Lloyd, H., and Amos, M. (2017). “Analysis of independent roulette selection in parallel ant colony optimization,” in Proceedings of the genetic and evolutionary computation conference, 19–26.
Lyu, Z., Wei, Z., Pan, Jie, Chen, H., Xia, C., Han, J., et al. (2019). Periodic charging planning for a mobile WCE in wireless rechargeable sensor networks based on hybrid PSO and GA algorithm. Appl. Soft Comput. 75, 388–403. doi:10.1016/j.asoc.2018.11.022
Mafarja, M. M., and Mirjalili, S. (2017). Hybrid Whale Optimization Algorithm with simulated annealing for feature selection. Neurocomputing 260, 302–312. doi:10.1016/j.neucom.2017.04.053
Mirjalili, S., Gandomi, A. H., Mirjalili, S.Z., Saremi, S., Faris, H., and Mirjalili, S. M. (2017). Salp swarm algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 114, 163–191. doi:10.1016/j.advengsoft.2017.07.002
Mirjalili, S., and Lewis, A. (2016). The Whale optimization algorithm. Adv. Eng. Softw. 95, 51–67. doi:10.1016/j.advengsoft.2016.01.008
Mirjalili, S., Mirjalili, S. M., Lewis, A., and Optimizer, G. W. (2014). Grey wolf optimizer. Adv. Eng. Softw. 69, 46–61. doi:10.1016/j.advengsoft.2013.12.007
Mohan, A., and Remya, G. (2014). A parallel implementation of ant colony optimization for tsp based on mapreduce framework. Int. J. Comput. Appl. 88 (8), 9–12. doi:10.5120/15371-3900
Nedjah, N., De Macedo Mourelle, L., and Gomes Morais, R. (2021). Inspiration-wise swarm intelligence meta-heuristics for continuous optimisation: A survey - part III. Int. J. Bio-Inspired Comput. 17 (4), 199–214. doi:10.1504/ijbic.2021.116578
Pablo, J. (1989). Caltech concurrent computation program Moscato, C3P Report, on evolution, search, optimization, genetic algorithms and martial arts: Towards memetic algorithms, 826.
Pan, J., and Wang, D. (2006). “An ant colony optimization algorithm for multiple travelling salesman problem,” in First International Conference on Innovative Computing, Information and Control - Volume I (ICICIC'06), Beijing, China, 30 August 2006 - 01 September 2006, 210–213.
Pantoja, A., and Quijano, N. (2011). A population dynamics approach for the dispatch of distributed generators. IEEE Trans. Ind. Electron. 58 (10), 4559–4567. doi:10.1109/tie.2011.2107714
Saenphon, T. (2019). “MVMO with opposite gradient initialization for single objective problems,” in Context-aware systems and applications, and nature of computation and communication. Editors P. Cong Vinh, and V. Alagar (Cham: Springer International Publishing), 126–135.
Saenphon, T., Phimoltares, S., and Lursinsap, C. (2014). Combining new fast opposite gradient search with ant colony optimization for solving travelling salesman problem. Eng. Appl. Artif. Intell. 35, 324–334. doi:10.1016/j.engappai.2014.06.026
Sharon Femi, P., and Ganesh Vaidyanathan, S. (2022). An efficient ensemble framework for outlier detection using bio-inspired algorithm. Int. J. Bio-Inspired Comput. 19 (2), 1–76. doi:10.1504/ijbic.2021.10043938
Shi, X. H., Liang, Y. C., Lee, H. P., Lu, C., and Wang, Q. X. (2007). Particle swarm optimization-based algorithms for TSP and generalized TSP. Inf. Process. Lett. 103 (5), 169–176. doi:10.1016/j.ipl.2007.03.010
Shu, Y., Yousefi, H., Cheng, P., Chen, J., Gu, Y. J., He, T., et al. (2016). Near-optimal velocity control for mobile charging in wireless rechargeable sensor networks. IEEE Trans. Mob. Comput. 15 (7), 1699–1713. doi:10.1109/tmc.2015.2473163
Sivaramakrishnan, N., Subramaniyaswamy, V., Ravi, L., Vijayakumar, V., Gao, X.-Z., and Rakshana Sri, S. L. (2020). An effective user clustering-based collaborative filtering recommender system with grey wolf optimisation. Int. J. Bio-Inspired Comput. 16 (1), 44–55. doi:10.1504/ijbic.2020.10031128
Sun, G., Liu, Y., Yang, M., Wang, A., and Zhang, Y. (2017). “Charging nodes deployment optimization in wireless rechargeable sensor network,” in GLOBECOM 2017 - 2017 IEEE Global Communications Conference, Singapore, 04-08 December 2017, 1–6.
Wang, K.-P., Huang, L., Zhou, C.-G., and Pang, Wei (2003). “Particle swarm optimization for traveling salesman problem,” in Proceedings of the 2003 International Conference on Machine Learning and Cybernetics (IEEE Cat. No.03EX693), Xi'an, 05-05 November 2003, 1583–1585.3
Xie, L., Shi, Y., Hou, Y. T., and Sherali, H. D. (2012). Making sensor networks immortal: An energy-renewal approach with wireless power transfer. Ieee. ACM. Trans. Netw. 20 (6), 1748–1761. doi:10.1109/tnet.2012.2185831
Xu, W., Liang, W., Lin, X., Mao, G., and Ren, X. (2014). “Towards perpetual sensor networks via deploying multiple mobile wireless chargers,” in 2014 43rd International Conference on Parallel Processing, Minneapolis, MN, USA, 09-12 September 2014, 80–89.
Yang, J., Shi, X., Marchese, M., and Liang, Y. (2008). An ant colony optimization method for generalized TSP problem. Prog. Nat. Sci. 18 (11), 1417–1422. doi:10.1016/j.pnsc.2008.03.028
Yang, M., Wang, A., Sun, G., and Zhang, Y. (2018). Deploying charging nodes in wireless rechargeable sensor networks based on improved firefly algorithm. Comput. Electr. Eng. 72, 719–731. doi:10.1016/j.compeleceng.2017.11.021
Yelmewad, P., Kumar, A., and Talawar, B. (2019). “MMAS on GPU for large TSP instances,” in 2019 10th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kanpur, India, 06-08 July 2019, 1–6.
Yi, J. -H., Lu, M., and Zhao, X.-J. (2020). Quantum inspired monarch butterfly optimisation for UCAV path planning navigation problem. Int. J. Bio-Inspired Comput. 15 (2), 75–89. doi:10.1504/ijbic.2020.106428
Zemmal, N., Azizi, N., Sellami, M., Cheriguene, S., and Ziani, A. (2021). A new hybrid system combining active learning and particle swarm optimisation for medical data classification. Int. J. Bio-Inspired Comput. 18 (1), 59–68. doi:10.1504/ijbic.2021.117427
Zhang, M., Wang, H., Cui, Z., and Chen, J. (2018). Hybrid multi-objective cuckoo search with dynamical local search. Memet. Comput. 10 (2), 199–208. doi:10.1007/s12293-017-0237-2
Zhang, Y., Cai, X., Zhu, H., and Xu, Y. (2020). Application an improved swarming optimisation in attribute reduction. Int. J. Bio-Inspired Comput. 16 (4), 213–219. doi:10.1504/ijbic.2020.112353
Keywords: wireless rechargeable sensor network, swarm intelligence, salp swarm algorithm, ant colony system, optimization
Citation: Yi Z, Yangkun Z, Hongda Y and Hong W (2022) Application of an improved Discrete Salp Swarm Algorithm to the wireless rechargeable sensor network problem. Front. Bioeng. Biotechnol. 10:923798. doi: 10.3389/fbioe.2022.923798
Received: 19 April 2022; Accepted: 08 August 2022;
Published: 20 September 2022.
Edited by:
Zhihua Cui, Taiyuan University of Science and Technology, ChinaReviewed by:
Nibedan Panda, Presidency University, IndiaAbhinav Tomar, Netaji Subhas University of Technology, India
Copyright © 2022 Yi, Yangkun, Hongda and Hong. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Wang Hong, d2hkenkyMDAwQHZpcC5zaW5hLmNvbQ==