 Juanyan Fang
Juanyan Fang Jinbao Meng2
Jinbao Meng2- 1Department of IT Management, Woosong University, Daejeon, South Korea
- 2Department of Mathematics and Computer Science, Tongling University, Tongling, Anhui, China
- 3The Centers of Disease Control and Prevention, Tongling, Anhui, China
To address the issues of low detection accuracy and poor effect caused by small Oncomelania hupensis data samples and small target sizes. This article proposes the O. hupensis snails detection algorithm, the YOLOv5s-ECA-vfnet based on improved YOLOv5s, by using YOLOv5s as the basic target detection model and optimizing the loss function to improve target learning ability for specific regions. The experimental findings show that the snail detection method of the YOLOv5s-ECA-vfnet, the precision (P), the recall (R) and the mean Average Precision (mAP) of the algorithm are improved by 1.3%, 1.26%, and 0.87%, respectively. It shows that this algorithm has a good effect on snail detection. The algorithm is capable of accurately and rapidly identifying O. hupensis snails on different conditions of lighting, sizes, and densities, and further providing a new technology for precise and intelligent investigation of O. hupensiss snails for schistosomiasis prevention institutions.
1 Introduction
Schistosomiasis is a disease caused by the parasitism of pathogenic schistosome in the human blood circulation system. Schistosoma mansoni, S. japonicum, S. haematobium, S. intercalatum, and S. mekongi are the five main species of schistosomes that live in humans (Huang, 2018). Among them, S. japonicum is mainly distributed in China, Indonesia and the Philippines. Oncomelania snails is the intermediate host of S. japonicum in China. Oncomelania snails and S. japonicum have a very subtle interaction. There must be Oncomelania snails where there is an epidemic of S. japonicum. Usually, there is S. japonicum without Oncomelania snails, it is unlikely to generate an epidemic. Oncomelania snails control is a critical component of schistosomiasis eradication. By the end of 2020, China’s Oncomelania snails covered around 2.06 billion m2 (Zhang et al., 2021a). Traditional O. hupensis snails surveys rely heavily on the naked sight to identify based on their morphology, which is time consuming, difficult, and not very accurate (Jiang and Yang, 2020), which impairs the accuracy of the O. hupensis snails situation assessment. As a result, research into novel technologies and methods of O. hupensis snails survey should be bolstered, and the efficiency of O. hupensis snails survey should be increased to meet the demand for S. japonicum elimination efforts.
The current research on the O. hupensis is mainly about its breeding environment distribution, monitoring methods, control technology, etc. Hong et al. (Hong et al., 2004) and Hang and ZhouHong (2004) found that the development of Oncomelania eggs, oxygen consumption, enzyme activity, etc. The temperature which too high or too low is not conducive to the survival, reproduction and life span of the Oncomelania snails. The most suitable temperature for the survival of the snails is 20–30°C (Huang, 2006). He et al. (2006) analyzed the number and spatial distribution characteristics of Oncomelania in different land types in a typical study area through indoor tests and field surveys. The results showed that there were large differences in the density of live O. hupensis between different land types. Yang et al. (2003) introduced the methods of microbial O. hupensis control, describing the general microbial O. hupensis control tests and their effects. The results of the microbial tests of Pseudomonas conrexa chester, Streptomyces griseolus 230, Streptomyces diastatochromogeryes 218, etc., have a strong role in killing O. hupensis and O. hupensis eggs. Wang (2010) extracted geometry, edge morphology, and brightness features from O. hupensis. They established classifiers with neural network techniques to increase recognition accuracy and stability. Shi et al. (2021a) developed a visual intelligent recognition model for O. hupensis using deep learning technology. They proposed a convolutional neural network with an optimized training strategy of “Data Augmentation + Transfer Learning,” which is capable of accurately recognizing O. hupensis images.
In summary, the algorithm used in the existing research is a two-stage target detection algorithm, which first generates a target pre-selection frame, and then classifies and regresses the area through the CNN network layer to obtain the detection frame (Xie et al., 2022a). The YOLO algorithm used in this study can generate the predicted classification probability and predicted coordinate value of the detected object with only one detection, so that it has faster training speed and detection speed than previous research algorithms. The O. hupensis snail is a small target with fuzzy border characteristics; its appearance is complex and difficult to recognize, and it presents unique detection issues. The results indicated that YOLOv5s-ECA-vfnet improved the algorithm’s precision (P), recall (R), and mean average precision (mAP) by 1.3 percent, 1.26 percent, and 0.87 percent respectively, over YOLOv5s, thereby providing a new technology for accurate and intelligent investigation of O. hupensis snails.
2 Algorithm YOLOv5
Three components make up the YOLOv5 algorithm. The first section contains the input, which consists of a 608-part training image. The second section is the backbone network, which extracts information-rich features from the input photos using the CSPDarknet53 network. The third section is the detection layer, which employs multiple scales for detection (Cai et al., 2021a). In addition, it incorporates a new bottom-up path aggregation network structure (Path Aggregation Networks, PAN) following the Feature Pyramid Networks (FPN) structure (Lin, 2016) to achieve feature information fusion at various scales. Following that, predictions are made on the three created feature maps.
The YOLOv5 algorithm’s convolution kernel is primarily 33 or 11, and the convolution structure is composed of a convolution layer, a batch normalization (BN) layer, and an activation function layer (Wu et al., 2018; Zhang et al., 2021b; Zhou et al., 2021). For multi-scale fusion, the Spatial Pyramid Pooling (SPP) structure employs maximum pooling of 1 × 1, 5 × 5, 9 × 9, and 13 × 13 (Cui et al., 2019; Gao, 2020). Furthermore, YOLOv5 maintains a multi-scale detection framework. After the backbone network extracts the features, two upsampling and three convolutions are done to achieve significant and tiny target categories and position prediction at three scales of 19 × 19, 38 × 38, and 76 × 76, respectively. The YOLOv5 makes advantage of adaptive anchor frame computation, which determines the optimal anchor frame values in the training set based on the training data set (Shu and Zhang, 2021). Figure 1 illustrates the overall algorithm structure of YOLOv5.
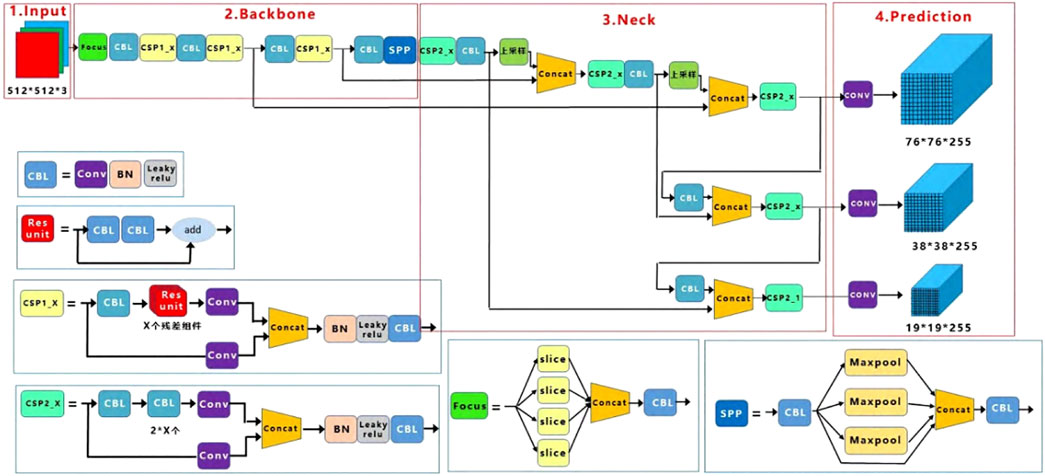
FIGURE 1. The overall algorithm structure of YOLOv5.
The YOLOv5s is a fast and precise detection method that performs well on open-source datasets, but its detection performance for O. hupensis identification tasks still needs to be improved. Experiments and tests have confirmed the enhanced algorithm described in this paper’s effectiveness.
3 Improvement of YOLOv5s-ECA-vfnet O. hupensis detection algorithm
3.1 YOLOv5s-ECA network based on effective channel attention mechanism
When the YOLOv5s network extracts features, it treats all model channels equally, which limits the algorithm’s detection effectiveness somewhat. Due to the study’s small and densely dispersed O. hupensis, an effective channel attention mechanism is incorporated into the CSPDarknet53 feature extraction network of YOLOv5s. The enhanced model is dubbed YOLOv5s-ECA-vfnet. The attention mechanism has been demonstrated to be a critical component of enhancing target detection performance and is frequently used in a variety of popular detection algorithms (Cui et al., 2021a; Hu and Yan, 2021). The most prominent feature of Efficient Channel Attention is that it avoids downscaling and cross-channel interactions, while reducing the complexity of the model and enhancing feature representation (Cai et al., 2020; Wang et al., 2020; Zhu et al., 2021). Figure 2 illustrates the structure of the ECA’s attention module.
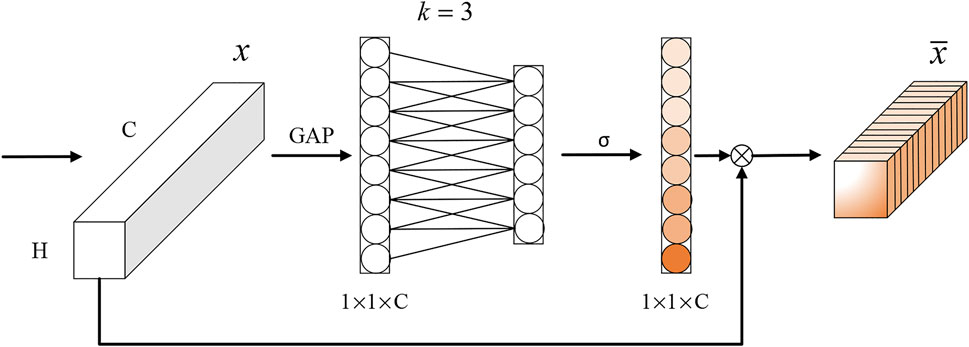
FIGURE 2. ECA attention module structure diagram.
The ECA module generates channel attention via a fast 1D convolution of size k, the size of which is completely determined by the adaptive channel dimensionality correlation function. After importing feature images with constant dimensionality
where γ and b are set to 2 and 1 by default, and
The general channel attention mechanism module selects a high-level feature map for global pooling and then compresses the two-dimensional features of each channel using dimensionality reduction. After this computation, the entire feature can be considered compressed in order to obtain a complete global perceptual field, but some spatial feature information is lost as the dimensionality is reduced. The relationship between the channel and spatial dimensions cannot be reflected. While more mature CBAM attention mechanisms are based on both space and channel, their computational processes are completely independent, significantly increasing computational time and effort (Wang and Wang, 2021). In comparison, the important significance of Efficient Channel Attention is: Firstly, it is not required dimensionality reduction. all channel and spatial dimension information will be integrated without losing information; secondly, the coverage area and channel dimension through the interaction of cross-channel information. The proportional relationship of C obtains an adaptive k value, which reduces the amount of calculation. The model’s complexity is reduced while the expression of features is increased, increasing the model’s accuracy (Xie et al., 2022b).
3.2 Optimization of the anchor frame parameters
The YOLOv5 implements the concept of Auto Learning Bounding Box Anchors, which utilizes the K-Means algorithm to automatically calculate the appropriate anchor box based on the labeled target box (ground truth) (Li et al., 2021a; Cui et al., 2021b), and the anchor box is learned from the training data.
Since the size of the detection target of the custom dataset differs from that of the public dataset, YOLOv5 learns the size of the anchor frame by relearning it automatically. The YOLOv5 generates nine anchor boxes from the COCO dataset: (10, 13), (16, 30), (33, 23), (30, 61), (62, 45), (59, 119), (116, 90), (156, 198) and (373, 326). In this paper, we add three anchoring frame sizes for detecting small targets with inconspicuous boundaries, namely (5, 6), (8, 14), and (15, 11). Anchor boxes were assigned based on the detection layer scale, and the statistical anchor box assignments for detecting O. hupensis with small targets are shown in Table 1.
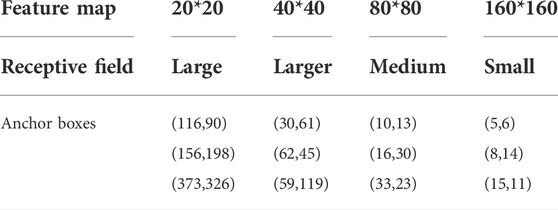
TABLE 1. Anchor Box allocation table.
3.3 Improvement of the confidence loss function
The YOLOv5 network uses the focal loss function, which has similar loss weights for positive and negative samples superimposed, and the focus is on more difficult to detect targets, which creates some difficulties when training the pinned O. hupensis snails. The number of positive and negative samples is highly unbalanced due to the small size of the pinned O. hupensis snails target. If both positive and negative sample losses are treated equally, the network’s convergence speed will be slowed and the learning information about the target will be lost (Li et al., 2021b). The original loss function concentrates the network’s attention on low-quality samples, reducing the efficiency of updating the target detection model parameters and having a direct effect on subsequent detection results. When the target arrangement is dense, the non-maximum suppression algorithm will eliminate the interference of redundant prediction boxes according to the highest scoring prediction box. At this time, the high score prediction box will affect the subsequent screening results. In this paper, we introduce the VariFocal Loss (Ye, 2021) function for YOLOv5s, as defined in Eq. 2
In which
4 Finds of experiments and their analysis
4.1 Platform for experimentation
The deep computing platform used in this paper is comprised of an Intel® Core(TM) i7-8700K CPU at 3.20 GHz as the central processor, Windows 10 Pro as the operating system, 16 GB DDR4 as the running memory, a GeForce GTX 1070 8 GB as the graphics processor, Python 3.8 with Pytorch 1.9 as the programming language.
4.2 Experimental dataset
The data in this paper were obtained from the study site: Jianghuzhou Island in Zongyang County on the Yangtze River Island in Zongyang County, the north bank of the lower Yangtze River in Anhui Province, China, a dataset of 2000 images of lake and the O. hupensis snails were built under the guidance of blood control professionals from the Tongling Center for Disease Control and Prevention according to the distribution pattern of O. hupensis snails (Zhou, 2019). Some samples of the dataset are shown in Figure 3.

FIGURE 3. Data set sample.
The collected data were filtered and organized, and all O. hupensis image samples in the collected images were annotated using the marker software Make-Sense. The annotated images’ annotation information was saved in the form of.txt files, which included the target object’s category and coordinate information. Figure 4 illustrates a data annotation example.

FIGURE 4. Example of data set annotation.
4.3 Evaluation indicators
The average precision (AP) and mean value of average precision mAP are frequently used in target detection to assess the model’s detection effectiveness and performance (Zhao et al., 2021). AP is defined as the area under the Recall and Precision curves, which is equivalent to mAP in this study for a single target. Ratio of area intersections (IoU). The model’s ability to predict the location is determined by comparing the area of the rectangular area predicted by the model to the rectangular area calibrated in the validation set. Precision (P): The ratio of correct targets detected by the model to the total number of targets, which indicates the model’s detection accuracy (Cai et al., 2021b; Shanid and Anitha, 2021).
Recall R: Recall is the ratio of targets detected by the model to the total number of targets, and it indicates the model’s ability to identify a wide variety of targets.
Where TP (True positive) denotes the number of positive samples correctly detected, that is, the prediction frame belongs to the same category as the labeled frame and IoU >0.5. FP (False positive) denotes the number of positive samples incorrectly detected. FN denotes the number of negative samples incorrectly detected. Since precision and recall are affected by confidence level, evaluating model performance solely on the basis of precision and recall would be unscientific and limited. Therefore, in our experiments, we use Average Precision (AP) to evaluate the model’s recognition performance, which is one of the most important indices for evaluating the performance of mainstream target detection algorithms.
4.4 Training parameter design
The spiked data set is divided randomly into training sets and test sets in a 7:3 ratio. There are 1,400 training and 600 test sets, respectively. The scale of the input image is 640 × 640. The number of training batches is 8. The training momentum is 0.843. The initial learning rate is set to 0.0032. The weight decay is set to 0.00036. The training epochs for theYOLOv5s and the YOLOv5s-ECA-vfnet are both 400 according to the model’s characteristics.
4.5 Analysis of findings
4.5.1 Training process loss values
The loss function value in deep learning can reflect the error between the final prediction result of this target detection model and the actual true value, and is used to analyze and judge the training process’s merit, the model’s convergence, and whether it is over fitted (Wang and Fu, 2018). While the loss function can be considered a layer of the network within the model definition in the PyTorch framework used in this paper. In actual use, it is more focused on the forward propagation process as a functional function (Gong et al., 2019; Fang et al., 2022; Zhang et al., 2022).
The loss function values of the original YOLOv5s model and the improved YOLOv5s-ECA-vfnet model are compared and analyzed, and the loss function values of YOLOv5s-ECA-vfnet are found to be significantly lower than those of the original YOLOv5s model after 150 epochs. Loss function as one of the criteria for evaluating the quality of model training. We found that the YOLOv5s-ECA-vfnet is significantly better than the YOLOv5s, and the YOLOv5s-ECA-vfnet has a lower loss function value under the same number of training epochs. Figure 5 depicts the loss function value’s transformation curve as a function of the number of training rounds.
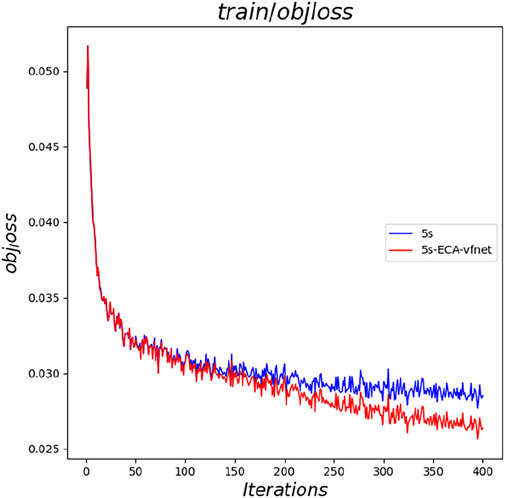
FIGURE 5. Curve of the loss function value with the number of training rounds.
4.5.2 Parameter convergence results
The training and evaluation parameters typically reflect the process of developing the model and the effect of target detection (Fang et al., 2021a; Shi et al., 2021b). Box Loss, Objectness Loss, Precision, Recall, bUFQQDAuNQ==, bUFQQDAuNTowLjk1, and so on are used as the primary parameters to determine the degree of convergence in this paper. The closer Box Loss and Objectness Loss values are to 0, the better the training effect. The Precision, Recall, bUFQQDAuNQ==, and bUFQQDAuNQ==: 0.95 values are to 1, the more converged the parameters are, and thus the better the training effect (Wang et al., 2017; Fang et al., 2021b).
The experimental results indicate that the parameters of both YOLOv5s and its improved YOLOv5s- ECA-vfnet gradually converge (the loss parameter converges to 0 and the result parameter converges to 1). Figure 6 illustrates the accuracy of the YOLOv5s training process, and the improved algorithm outperforms the traditional YOLOv5s. From the loss curve of border regression in Figure 7, it can be seen that the loss value of the YOLOv5s- ECA-vfnet is significantly smaller than that of the YOLOv5s algorithm and is stable at about 0.01. Figures 8, 9 show the recall rate and the average precision mean of training, respectively, and the proposed algorithm has also improved.
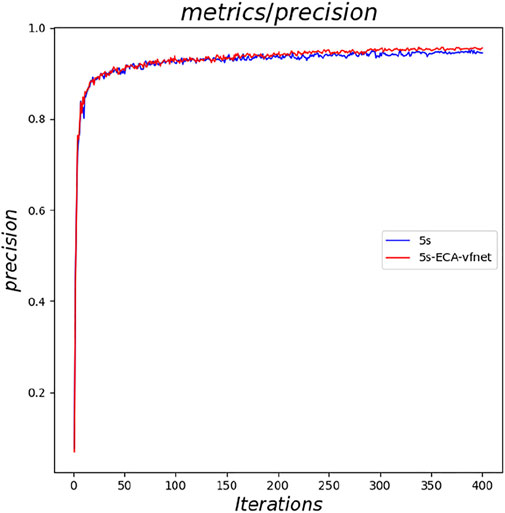
FIGURE 6. Comparison of precision.
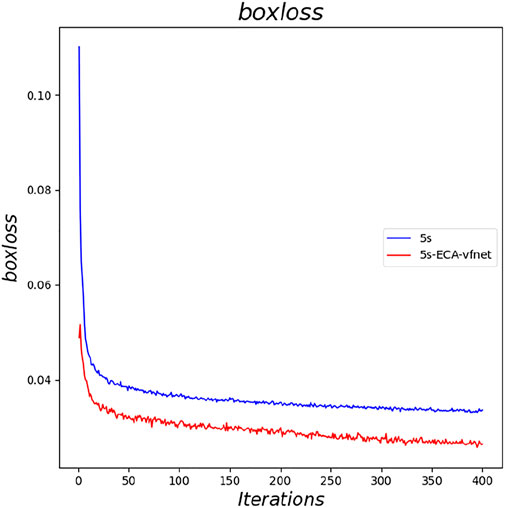
FIGURE 7. Comparison of boxloss.
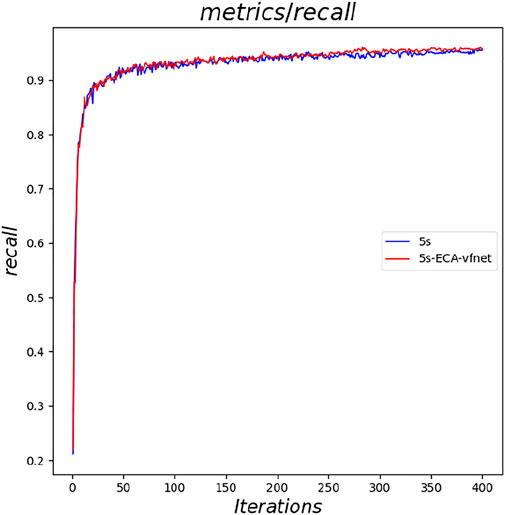
FIGURE 8. Comparison of recall.
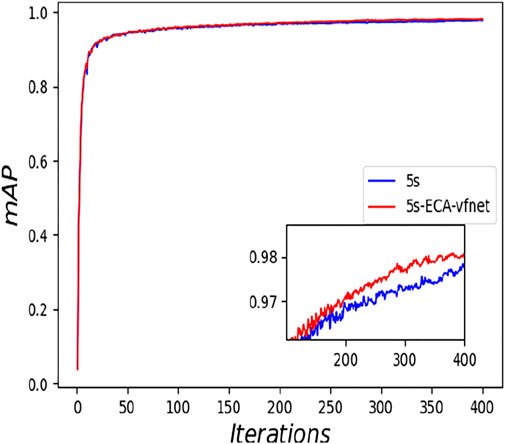
FIGURE 9. Comparison of mAP.
In order to verify the effectiveness of the YOLOv5s-ECA-vfnet algorithm in snail detection, compared with the YOLOv5s, the experiment uses precision, mAP, Recall and inference time as evaluation indicators. The results are shown in Table 2.

TABLE 2. Comparison with the YOLOv5s.
4.5.3 Predictability of the YOLOv5s-ECA-vfnet algorithm
The effect of O. hupensis target visualization detection is shown in Figure 10, from Figures 10A,B it can be seen that the detection of densely arranged target regions with the original algorithm is seriously missed, while the detection rate of the improved algorithm is significantly improved and the effect of dense targets on detection is effectively reduced. Figure 10C The loss function in the original algorithm does not pay enough attention to the high-quality prediction frames, resulting in a low confidence of the output prediction frames. YOLOv5-eca-vfnet is added with an attention mechanism, improved anchor frames, and improved loss function, and from Figure 10D it can be found that the confidence of the prediction frames is significantly improved, the prediction frames can optimally cover the target area, and the final output is more accurate target location information.
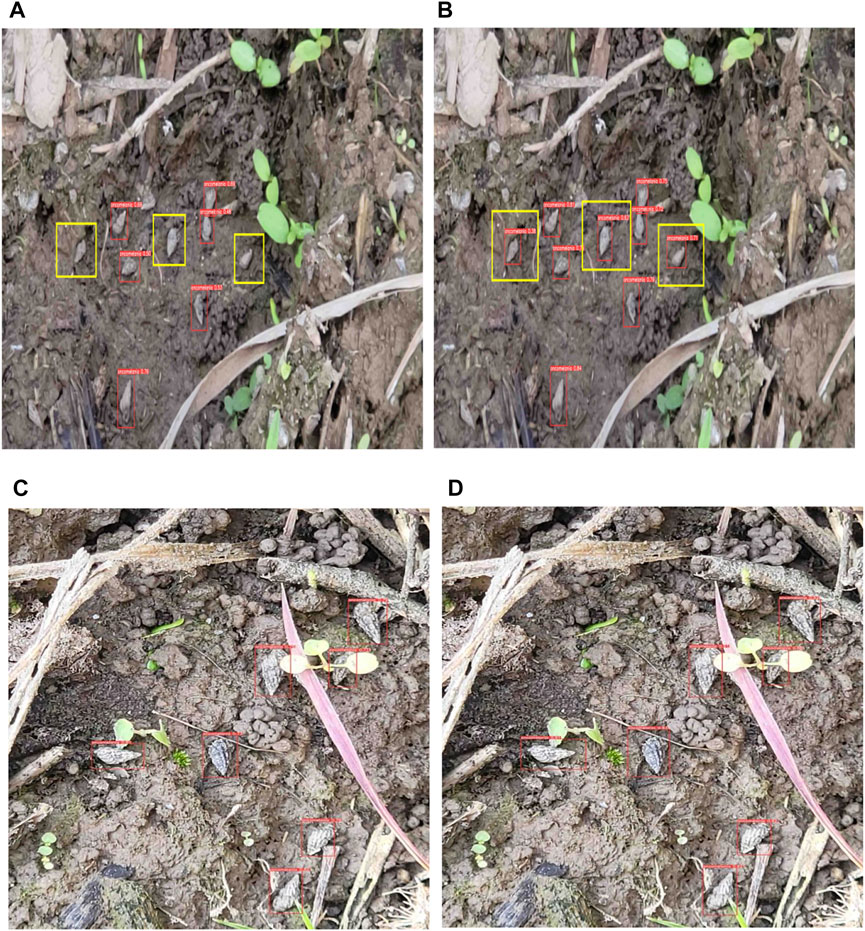
FIGURE 10. The result of object detection. (A,C) The prediction of the YOLOv5s; (B,D) The prediction of the YOLOv5-ECA-vfnet; The red rectangular boxes are the probability values of the algorithms to identify the pictures containing the snails, and the three yellow boxes are snails that YOLOv5s cannot detect in (A). The improved algorithm can detect the snails in (B). (C,D) are different in the predicted probability values.
5 Conclusion
In recent years, machine learning techniques of computer vision have been gradually applied to the field of parasitic disease control research, and certain results have been achieved (Eshel et al., 2017). The recognition results are often constrained by the merits of manually selected O. hupensis features through the problems of difficult manual extraction of O. hupensis image features, poor adaptability and weak anti-interference ability. In contrast, visual recognition based on deep learning techniques can often achieve better results.
To solve the problems of complex appearance of O. hupensis, inconspicuous boundary features, small detection target and low accuracy of O. hupensis detection due to small O. hupensis data samples, this paper introduces the effective channel attention mechanism, propose the YOLOv5s-ECA-vfnet algorithm based on O. hupensis conch image detection by optimizing the anchor frame parameters and changing the confidence loss function. The experimental findings show that the YOLOv5s-CA-vfnet algorithm has improved 1.3%, 1.26% and 0.87% in Precision (P), Recall (R) and mean Average Precision (mAP), respectively, over YOLOv5s. The O. hupensis image classification dataset also provides a data base for the subsequent study of other parasitic host snail identification.
There are some limitations in this study. 1) The sample collection area of this study was limited to Anhui Province, and could not represent the image recognition ability of samples from other regions of the country. 2) This study established an O. hupensis snail identification model, which could only identify O. hupensis snail, but could not sub-classify and identify which subspecies of O. hupensis snail. In the future, we will further expand the scope of O. hupensis snail and similar snail sample collection and further optimize the subclassification capability of the intelligent model. Further increase the scope of application of the model (Rauf et al., 2020; Sharifizadeh et al., 2021).
Data availability statement
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding authors.
Author contributions
Conceptualization, JF; methodology, JF; software, JF and JM; formal analysis, JF; investigation, JF and YL; Resources, XL; writing–original draft preparation, JF; writing–review and editing, JF and CW; visualization, JM; supervision, PQ and XL; project administration, JF; funding acquisition, JF, CW, YL, and PQ. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by Top-Notch talents cultivation project (gxyq2021215) of Anhui Higher Education, Anhui Natural Science Research Project (2020) under Grant no. KJ 2020A0696, the project of leading water from Yangtze to Huaihe River about Schistosomiasis (YJJHXF2021003), key research and development projects of Tongling science and technology plan (20200201016) and key research and development program of Anhui province, under Grant NO.202004a05020010.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Cai, X. J., Cao, Y. H., Ren, Y. Q., Cui, Z. H., and Zhang, W. H. (2021). Multi-objective evolutionary 3D face reconstruction based on improved encoder-decoder network. Inf. Sci. 581, 233–248. doi:10.1016/j.ins.2021.09.024
Cai, X. J., Geng, S. J., Wu, D., and Chen, J. J. (2021). Unified integration of many-objective optimization algorithm based on temporary offspring for software defects prediction. Swarm Evol. Comput. 63, 100871. doi:10.1016/J.SWEVO.2021.100871
Cai, X. J., Hu, Z. M., and Chen, J. J. (2020). A many-objective optimization recommendation algorithm based on knowledge mining. Inf. Sci. 537, 148–161. doi:10.1016/j.ins.2020.05.067
Cui, Z. H., Du, L., Wang, P. H., Cai, X. J., and Zhang, W. S. (2019). Malicious code detection based on CNNs and multi-objective algorithm. J. Parallel Distributed Comput. 129, 50–58. doi:10.1016/j.jpdc.2019.03.010
Cui, Z. H., Jing, X. C., Zhao, P., Zhang, W. S., and Chen, J. J. (2021). A new subspace clustering strategy for AI-based data analysis in IoT system. IEEE Internet Things J. 8 (16), 12540–12549. doi:10.1109/JIOT.2021.3056578
Cui, Z. H., Zhao, Y. R., Cao, Y., Cai, X. J., Zhang, W. S., and Chen, J. J. (2021). Malicious code detection under 5G HetNets based on a multi-objective RBM model. IEEE Netw. 35 (2), 82–87. doi:10.1109/mnet.011.2000331
Eshel, Y., Houri-Yafin, A., Benkuzari, H., Lezmy, N., Soni, M., Charles, M., et al. (2017). Evaluation of the parasight platform for malaria diagnosis. J. Clin. Microbiol. 55 (3), 768–775. doi:10.1128/JCM.02155-16
Fang, L. D., Ding, S. H., Park, J. H., and Ma, L. (2022). Adaptive fuzzy control for nontriangular stochastic high-order nonlinear systems subject to asymmetric output constraints. IEEE Trans. Cybern. 52, 1280–1291. doi:10.1109/TCYB.2020.3000920
Fang, L. D., Ding, S. H., Park, J. H., and Ma, L. (2021). Adaptive fuzzy control for stochastic high-order nonlinear systems with output constraints. IEEE Trans. Fuzzy Syst. 29 (9), 2635–2646. doi:10.1109/TCYB.2020.300092010.1109/tfuzz.2020.3005350
Fang, L. D., Ma, L., Ding, S. H., and Park, S. H. (2021). Finite-time stabilization of high-order stochastic nonlinear systems with asymmetric output constraints. IEEE Trans. Syst. Man. Cybern. Syst. 51 (11), 7201–7213. doi:10.1109/tsmc.2020.2965589
Gao, Z. (2020). Research on remote sensing image object detection based on deep learning. Qingdao: Shandong University of Science and Technology. [dissertation/master’s thesis].
Gong, Y. N., Tan, M. Y., and Wang, Z. (2019). AI recognition of infrared camera image of wild animals based on deep learning:Northeast tiger and leopard national park for example. Acta Theriol. Sin. 39 (4), 458–465. doi:10.16829/j.slxb.150333
Hang, D. R., and ZhouHong, X. N. Q. B. (2004). Study on relationship between environmental temperature and oxygen demand of oncomelania snails. Chin. J. Schisto Control 16 (5), 362–329. doi:10.16250/j.32.1374.2004.05.004
He, Y. P., Fei, S. M., and Jiang, J. M. (2006). The characteristic of quantity and spatial distribution of snails in the renshou county. Wetl. Sci. Manag. 2 (4), 40–43.
Hong, Q. B., Jiang, Y. G., and Yang, K. (2004). Developmental zero and effective accumulated temperature of oncomelania eggs under constant temperature. Chin. J. Schisto Control 16 (6), 432–435. doi:10.16250/j.32.1374.2004.06.012
Hu, Y. K., and Yan, X. S. (2021). Neural network-assisted expensive optimisation algorithm for pollution source rapid positioning of drinking water. Ijbic 17 (4), 227–235. doi:10.1504/IJBIC.2021.11661510.1504/ijbic.2021.10039666
Huang, L. L. (2006).Oncomelania distribution characteristic and relationship with environment factors in the hilly and mountains district. Beijin: Chinese Academy of Forestry. [dissertation/master’s thesis].
Huang, S. (2018). Preliminary study on the molecular mechanism of biological control on Schistosoma japonicum in Oncomelania hupensis and involvement of MIF cytokine in the snail immune response to the parasite S. Xiamen (Fujian): Xiamen University. japonicum. [dissertation/doctor’s thesis].
Jiang, T. T., and Yang, K. (2020). Progresses of research on patterns and monitoring approaches of Oncomelania hupensis spread. Chin. J. Schisto Control 32 (2), 208–212. doi:10.16250/j.32.1374.2019124
Li, J., Cao, F., Cheng, H. H., and Qian, Y. H. (2021). Learning the number of filters in convolutional neural networks. Ijbic 17 (2), 75–84. doi:10.1504/ijbic.2021.114101
Li, Y. p., Ni, Z. W., and Zhou, W. L. (2021). Clustering algorithm for mixed attributes data based on glowworm swarm optimisation algorithm and K-prototypes algorithm. Ijbic 18 (2), 105–113. doi:10.1504/IJBIC.2021.118095
Lin, T-Y. (2016). Feature Pyramid networks for object detection. Honolulu (Hawaii): CoRR, 03144. abs/1612.
Rauf, H. T., Hadi, M., and Rehman, A. (2020). Bat algorithm with Weibull walk for solving global optimisation and classification problems. Ijbic 15 (3), 159–170. doi:10.1504/IJBIC.2020.107470
Shanid, M., and Anitha, A. (2021). Adaptive optimisation driven deep belief networks for lung cancer detection and severity level classification. Ijbic 18 (2), 114–121. doi:10.1504/IJBIC.2021.118101
Sharifizadeh, S., Ganjtabesh, G., and Dalini, N. D. (2021). Top-down modulated model for object recognition in different categorisation levels. Ijbic 18 (1), 13–26. doi:10.1504/IJBIC.2021.117428
Shi, L., Xiong, C. H., Liu, M. M., Wei, X. S., Wang, X. Y., Wang, T., et al. (2021). Establishment of a deep learning ⁃visual model for intelligent recognition of Oncomelania hupensis. Chin. J. Schisto Control 33 (05), 445–451. doi:10.16250/j.32.1374.2021033
Shi, X. H., Guo, H. Y., Wu, C. G., Liang, Y. C., and Chang, Z. Y. (2021). A block-encoding method for evolving neural network architecture. Ijbic 18 (1), 27–37. doi:10.1504/IJBIC.2021.117436
Shu, L., and Zhang, Z. J. B. (2021). Research on dense-Yolov5 algorithm for infrared target detection. Opt. Optoelectron. Technol. 19 (1), 69–75. doi:10.19519/j.cnki.1672-3392.2021.01.010
Wang, H. (2010). Research on image recognition technology of O. hupensis based on neural network. Hubei: Hubei University. [dissertation/master’s thesis].
Wang, Q., Wu, B., Zhu, P., Li, P., Zuo, W., and Hu, Q. (2020). ECA-Net: Efficient channel attention for deep convolutional neural networks. Proc. IEEE Comput. Soc. Conf. Comput. Vis. Pattern Recognit., 11531–11539. doi:10.1109/CVPR42600.2020.01155
Wang, R., Zhang, J., Dong, W., Yu, J., Xie, C., Li, R., et al. (2017). A crop pests image classification algorithm based on deep convolutional neural network. Telkomnika 15 (3), 1239. doi:10.12928/telkomnika.v15i3.5382
Wang, W. X., and Fu, Y. T. (2018). Infrared ship target detection method based on deep convolution neural network. Acta Opt. Sin. 38 (07), 160–166.
Wang, Y. N., and Wang, X. L. (2021). Remote sensing image target detection model based on attention and feature fusion. Laser & Optoelectron. Prog. 58 (2), 363–371. doi:10.3788/L0P202158.0228003
Wu, S. T., Zhong, S. H., and Yan Liu, Y. (2018). Deep residual learning for image steganalysis. Multimedia Tools Appl. 77 (9), 10437–10453. doi:10.1007/s11042-017-4440-4
Xie, Y., Gui, F. X., Wang, W. J., and Chien, C. F. (2022). A two-stage multi-population genetic algorithm with heuristics for workflow scheduling in heterogeneous distributed computing environments. IEEE Trans. Cloud Comput., 1. doi:10.1109/TCC.2021.3137881
Xie, Y., Sheng, Y. H., Qiu, M. Q., and Gui, F. X. (2022). An adaptive decoding biased random key genetic algorithm for cloud workflow scheduling. Eng. Appl. Artif. Intell. 112, 104879. doi:10.1016/j.engappai.2022.104879
Yang, J. M., Xiao, R. F., and Zhou, Y. (2003). Studies on killing snail of microorganism. J. Hubei Univ. Sci. (04), 337–341.
Ye, X. F. (2021). Research on target trajectory prediction and dense crowd tracking methods. Chengdu: University of Electronic Science and Technology of China. [dissertation/master’s thesis].
Zhang, L. J., Xu, Z. M., Yang, F., Dang, H., Li, Y. L., Cao, C. L., et al. (2021). Endemic status of schistosomiasis in People’s Republic of China in 2020. Chin. J. Schisto Control 33 (03), 225–233. doi:10.16250/j.32.1374.2021109
Zhang, Z. X., Cao, Y., Cui, Z. H., Zhang, W. H., and Chen, J. J. (2021). A many-objective optimization based intelligent intrusion detection algorithm for enhancing security of vehicular networks in 6G. IEEE Trans. Veh. Technol. 70 (6), 5234–5243. doi:10.1109/tvt.2021.3057074
Zhang, Z. X., Zhao, M. K., Wang, H., Cui, Z. H., and Zhang, W. S. (2022). An efficient interval many-objective evolutionary algorithm for cloud task scheduling problem under uncertainty. Inf. Sci. 583, 56–72. doi:10.1016/J.INS.2021.11.027
Zhao, J. L., Zhang, X. Z., and Dong, H. Y. (2021). Defect detection in transmission line based on scale-invariant feature pyramid networks. Computer engineering. Computer engineering and applications. Available at: http://kns.cnki.net/kcms/detail/11.2127.TP.20210329.1744.017.html.
Zhou, X. N. (2019). Intensifying the precision control to facilitate the progress towards schistoso-miasis elimination in mountainous and hilly regions of China. Chin. J. Schisto Control 31 (03), 229–230+237. doi:10.16250/j.32.1374.2019212
Zhou, Y. F., Sai, Y. X., and Yan, L. (2021). An improved extension neural network methodology for fault diagnosis of complex electromechanical system. Ijbic 18 (4), 250–258. doi:10.1504/IJBIC.2021.119950
Keywords: the YOLOv5 algorithm, the YOLOv5, method of coordinated attention, target detection, effective channel attention mechanism
Citation: Fang J, Meng J, Liu X, Li Y, Qi P and Wei C (2022) Single-target detection of Oncomelania hupensis based on improved YOLOv5s. Front. Bioeng. Biotechnol. 10:861079. doi: 10.3389/fbioe.2022.861079
Received: 24 January 2022; Accepted: 08 August 2022;
Published: 31 August 2022.
Edited by:
Tinggui Chen, Zhejiang Gongshang University, ChinaReviewed by:
Martin Nelwan, Nelwan Institution for Human Resource Development, IndonesiaLiping Chen, Hefei University of Technology, China
Donghui Pan, Anhui University, China
Copyright © 2022 Fang, Meng, Liu, Li, Qi and Wei. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Juanyan Fang, ZmFuZ2p1YW55YW5AdGx1LmVkdS5jbg==; Changcheng Wei, Y2hhbmdjaGVuZ0B0bHUuZWR1LmNu