 Björn Lidestam
Björn Lidestam Birgitta Thorslund
Birgitta Thorslund Helena Selander
Helena Selander David Näsman
David Näsman Joakim Dahlman1
Joakim Dahlman1
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Sustain. Cities , 29 May 2020
Sec. Health and Cities
Volume 2 - 2020 | https://doi.org/10.3389/frsc.2020.00019
This article is part of the Research Topic Advances in Road Safety Planning View all 21 articles
Emergency driving entails substantially higher risk rates than ordinary driving, and it is crucial that other road users notice the emergency vehicles on call. Sirens and emergency lights are used to warn and demand that other road users give way and provide safe passage, but accidents still occur. The purpose of this study was to test the effect of a broadcast hyper local Emergency Vehicle Approaching (EVA) message via RDS radio, noticing that an emergency vehicle on call is approaching and demands that others give way, on the propensity of individual drivers to give way. In two simulator experiments, a total of 90 car drivers participated. In Experiment 1, drivers were passed three times by an ambulance in traffic conditions where it was easy to detect the ambulance early, and two versions of EVA message were compared to a baseline condition without a broadcast message. In Experiment 2, drivers were passed only once by an ambulance and in traffic conditions that made it difficult to detect the ambulance early, and either received an EVA message, or no message. The results showed that EVA messaging made drivers give way earlier and learned to give way earlier even without an EVA message. The main finding was that EVA messaging was necessary for making inexperienced drivers give way to an approaching emergency vehicle on call. Most of them did not know that they are obliged to give way, and some did not notice the emergency vehicle before it passed them. In conclusion, the study suggests that EVA messaging to alert and instruct drivers how to give way properly is beneficial for traffic safety and for enabling time-efficient emergency transports.
Risk of accidents in connection with emergency driving (i.e., authorized driving in response to emergencies) have been more or less proportional to the increase of traffic and traffic density (Wilbur, 1997; Burke et al., 2001; Lundälv et al., 2010). Emergency driving entails risks, since the emergency vehicle (i.e., the vehicle designated and authorized to respond to emergencies) often drives significantly faster than the other vehicles (Saunders and Gough, 2003; Petzäll et al., 2011). Speed in itself, and speed differences between road users, are hazardous. Emergency vehicles on call, using sirens and warning lights, therefore have substantially higher accident rates than when not being on call (Unterkofler and Schmiedel, 1994; Custalow and Gravitz, 2004; Bockting, 2007; Gormley et al., 2008; Pieper-Nagel and Wiegand, 2011; Abdelwanis, 2014). Further, the emergency driver often has a complex task to perform during driving (e.g., Albertsson and Sundström, 2011; Hsiao et al., 2018; Prohn and Herbig, 2020). For example, Finnish paramedics identify lack of education and training for emergency response driving as a main risk factor (Koski and Summanen, 2019). The emergency driver may need to communicate with colleagues and the dispatch, and to navigate. The situation in itself is also by definition stressful, since getting to and from an accident site (for ambulance drivers and firefighters) or crime site (for the Police) is potentially a matter of life or death. Emergency driving is further complicated by traffic intensity, which varies considerably depending on the site of the accident, where the emergency vehicle is in relation to the accident site but also because on actions taken by other road users, such as their reactions as they notice the warning lights and sirens (Vägverket, 2008). However, other road users often fail to observe the emergency vehicle although they use their blue emergency lights and sirens (Bylund et al., 1997). Traffic norms (i.e., how and why road users abide by laws and regulations, and interact) also may affect how inclined the road users are to identify an emergency on call and assist in providing safe passage for it (Alonso et al., 2017).
Traffic accidents involving an emergency vehicle on call and another vehicle can obviously to varying degree depend on the driver of the emergency vehicle and the driver of the other vehicle, respectively (Drucker et al., 2013). The emergency driver is obliged to use the warning systems of the vehicle to signal that the emergency vehicle is on call and demands all other road users to yield. The emergency driver also needs to drive such that the likelihood increases that the other road users detect that there is an emergency vehicle on call. This can be accomplished by not driving too much faster than the other traffic, placing the emergency vehicle more toward the middle of the road, and by not driving too near behind other vehicles. The emergency driver also needs to observe and adhere to maximum risk awareness, since speed is usually fast, margin of error is therefore small, and consequences of accidents are potentially fatal. The present paper is primarily about the other road users' behavior, however.
When an emergency vehicle approaches with sirens wailing and blue lights flashing, all other road users are obliged to yield and provide safe passage for the emergency vehicle. For the other road users to be able to follow the rule, two basic criteria must be fulfilled. First of all, they need to receive the information, that is, detect and identify that an emergency vehicle is approaching (e.g., “I see flashing blue lights and I hear sirens, so it must be an emergency vehicle on call, and it is coming my way”). Secondly, they need to know the rule in order to intentionally act correctly according to the information (e.g., “The emergency vehicle is on call and I am in its way, hence I need to yield safely and efficiently”). It may not be necessary for all road users to notice the emergency vehicle and know how to behave, since they may follow the good example of other road users. However, some road users do need to provide a good example, and rule knowledge is key to following rules. A restriction is that the road users also need to be in a state of mind such that they can access the rule and make correct decisions, and this is inhibited if they are startled or stressed, for instance if they notice the emergency vehicle very late.
Hence, the propensity to give way may depend on that the driver knows the rule, that is, that giving way is obligatory. Novel drivers (i.e., who have not had their driving license for very long) should be able to remember this rule from their driving education, provided that they learned and remember this rule among the great number of rules in the curriculum. On the other hand, an average novel driver has perhaps not experienced being passed by an emergency vehicle on call. The opposite applies for experienced drivers: they may have forgotten what was taught during their driving education, but they should several times have been passed by emergency vehicles on call.
The most common available warning systems are siren and emergency vehicle lighting (see e.g., Catchpole and Mckeown, 2007), both of which have limited reach and detectability. This is sometimes supplemented with broadcast calls over radio. A well-established technology for this is the Traffic Announcement (TA) features of the European Radio Data System (RDS). However, only a very small proportion of the recipients of such broadcast warnings are along the route of the emergency transport. In terms of signal detection theory (e.g., Green and Swets, 1966), most TA broadcasts are “false alarms” to the average driver. As a consequence, radio stations are reluctant to interrupt regular programming, and tend to select only the most critical cases (Wessman and Radio, personal communication, 2013). Recently, cellular mobile communication technology and collaborative intelligent transport services (C-ITS) begin to enable new ways of conveying traffic-related messages (e.g., Buchenscheit et al., 2009). Such messages can be adapted to the situation, traffic flow and individually directed only to those road users who are at risk of interfering with an emergency vehicle's route. Associated services are developed and demonstrated in the EU project NordicWay 2 (https://www.nordicway.net/), within which protocols and standards are developed for messages, issuing Emergency Vehicle Approaching (EVA) messages. Effects of C-ITS-based warning messages include a greater proportion of road users who react to the emergency vehicles, and a shorter mean response time (Lenné et al., 2008; Savolainen et al., 2010) as well as lower mean speed among the road users (Savolainen et al., 2010).
EVA messages can be defined as warnings that an emergency vehicle is approaching and demands that drivers ahead give way, and they target both self-driving and manually operated vehicles. The technology behind EVA messages is that the emergency vehicle that demands the traffic ahead of it to give way carries an FM radio transmitter that broadcasts the EVA message as a hyper local traffic warning via RDS (H&E Solutions, 2018) and on the TA frequency. The signal strength is proportional to difference in speed between the emergency vehicle and the traffic ahead of it, such that the message should not be received too far ahead in time, usually 10–15 s before the emergency vehicle passes. The EVA message is received in the radio and presented via the speakers. If available in the receiving car, the message is also presented in the dashboard screen (H&E Solutions, 2018).
There are several potential benefits of EVA messaging via RDS. First, it has the potential to reach the majority of road users in cars, since RDS has been included in the vast majority of car stereo devices for many years, and no additional technology in the receiving vehicle is needed. Second, almost all recipients of the message are along the route of the emergency vehicle, so there will be a small proportion of “false alarms” in terms of not being affected by the approaching emergency vehicle according to the alarm. Third, the alarm warning signal is amplified or augmented, and a greater number of road users can therefore earlier notice that there is an approaching emergency vehicle. Road users who are inattentive or have difficulty hearing the sirens approaching since they are listening to loud music on their car stereo will also be easier to notify. Fourth, those road users who do not know that they are obliged to give way and how to give way properly can be instructed. Fifth, and finally, the timing of the alarm signal can be adjusted in order for the road users to receive it with adequate timing—if the alarm signal is too early, they may treat it as a false alarm and therefore not give way.
The general purpose of the present paper was to test the effect of EVA messaging on individual drivers' propensity to give way to an emergency vehicle on call. Two simulator experiments were conducted to test and specify this effect with regard to how easy the emergency vehicle on call was to detect, and driving experience of the drivers who were to give way to the emergency vehicle on call.
The purpose was to test the effect of EVA messaging on the propensity of a wide variety of drivers to give way to an ambulance on an emergency call, and when the drivers should have no difficulty detecting and identifying the ambulance at an early stage. Experiment 1 also served to explore and prepare for Experiment 2 by establishing if there were effects of EVA messaging, and by developing the methods.
A total of n = 22 car drivers aged 19–57 years, M = 29.3 years, SD = 12,3 years, whereof 13 males and 9 females, participated. A valid driver's license for a private car (category B in Sweden) was required. They had had their driving licenses for 1–38 years, M = 10.1 years, SD = 12.3 years, and the recent year they varied between almost no driving at all to driving almost every day (1–5, M = 3.04, SD = 1.55) and between 10 and 40,000 km (see Appendix). Four drivers had extended driving licenses, for heavy trailer and truck (Swedish categories BE and C). All but four participants were recruited via e-mail lists to undergraduate courses at Linköping University, whereas the four oldest participants (aged over 50, and who also had most driving experience) were recruited via personal connections. They were rewarded with a cinema ticket each for their participation.
A proprietary, small, car simulator without motion cueing was used. The only perceptual cues were from vision (i.e., the changing view of the surrounding environment when driving in it, including an inner rear-view mirror) and sound (i.e., from engine, other vehicles, tires and transmission, and air resistance). The visual cues were displayed on a 43-inch TV monitor placed 95 cm in front of the driver, thereby providing a field of view of about 90° horizontally and about 50° vertically. VTI's proprietary simulation software was used. The monitor's refresh rate was 60 Hz. The car stereo (emulating an RDS radio) was turned off, except for use of a “ping” sound to alert the driver when the EVA message was initiated in the instrument cluster (or in the instrument cluster as well as on the infotainment display in the center console). From the participant's position, the background noise sound pressure level (SPL) from ventilation and air conditioning was about 60 dBA, whereas the combined SPL from the background noise and the simulated driving at 80 kph was about 71 dBA. The SPL from the “ping” sound was about 68 dBA, which was considered to be well-audible for all potential participants. The SPL from the ambulance's siren increased proportionally to the distance. The sirens could be heard at about 60 dBA as soon as it appeared (i.e., was implemented in the simulation) 500 m behind the participant's car and increased to about 84 dBA when it was alongside the car.
More specifically, the EVA message was presented in two counterbalanced versions (EVA 1 and EVA 2, respectively). In EVA 1, only the instrument cluster was used. The EVA message was presented as a yellow triangle with a blue warning light and a text message stating “Utryckningsfordon på ingång! Var uppmärksam!” [Emergency vehicle approaching! Pay attention!]. As the ambulance closed in, further instructions were displayed regarding yielding and slowing down. In EVA 2, the EVA message was additionally presented on the infotainment display in the center console. The EVA message was received 50 s before the ambulance was estimated to catch up with the participant's car, based on the relative speed difference. In a control condition without EVA message (EVA 0) no EVA message and no “ping” sound was presented.
The driving scenario was a rural road, 3.5 m wide, with a roadside 2 m wide, marked by road-side markings 10 cm wide, 1 m long, and 2 m apart. The road center lines were 10 cm wide, 3 m long, and 9 m apart. Other traffic consisted of cars in the opposite direction, with an average of 20 s apart. No other vehicles in the same direction as the participant's car appeared in the scenario except an ambulance that closed in from 500 m behind, at a speed of 120% faster than the participant's own speed, but not slower than 80 kph. During takeover, the target lateral position of the ambulance was in the center of the opposite lane. The road was flat and relatively straight. There was not a lot of vegetation or buildings by the sides of the road, and the closest vegetation was 3 m from the edge of the roadside. Therefore, the ambulance could be heard and seen at a very far distance before it passed the participant driver.
The participants were first informed about the experiment according to the ethical guidelines by Vetenskapsrådet (n.d.) whereupon written informed consent was received. An introduction to the simulator setup followed. The positions of the rear-view mirrors were pointed out, as was the fact that the car was equipped with an automatic transmission. The interfaces for receiving and acknowledging messages were also shown, but no specific information about what messages could be displayed was given.
The driving task began with a practice drive for 5 min. The instruction was to drive no faster than 30 kph and to look straight ahead for the first minute, to minimize the risk of simulator sickness, and then accelerate to the speed limit.
The test scenario took about 30 min to complete and was about 20,000 m long. An ambulance on an emergency call, with blue lights and sirens engaged, caught up with and passed the participant's car three times during the session (at about 3,000, 6,000, and 11,500 m from the start of the scenario). The scenario ended after the participant was passed by the ambulance for the third time, at about 20,000 m.
There were three experimental conditions of EVA Message: baseline with no EVA message (EVA 0), EVA message on the instrument cluster alone (EVA 1), and EVA message on the instrument cluster and on the infotainment display in the center console (EVA 2). The design was 3 × 2 × 2 (EVA Message × Interface Order × Baseline Order) split-plot factorial, with EVA Message and Interface Order within groups, and Baseline Order between groups.
EVA Message refers to the three experimental conditions (i.e., EVA 0, EVA 1, and EVA 3, respectively). Interface Order refers to the order that the EVA message was conveyed, such that in Interface Order 1, EVA 1 was presented first, whereas in Interface Order 2, EVA 2 was presented first. With regard to Baseline Order, Baseline Order 1 had the EVA 0 baseline condition first and then either of EVA 1 and EVA 2, whereas Baseline Order 2 had either EVA 1 or EVA 2 first, and finished with EVA 0.
There were three dependent variables. The first one was distance to the ambulance when giving way (i.e., when the participant's car was more than 3 m to the right from the road center line, which is approximately when the wheels on the right-hand side touch the road-side markings). The second one was lateral position when the ambulance was alongside the participant. The third one was speed when the ambulance was alongside the participant.
A 3 × 2 × 2 (EVA Message × Interface Order × Baseline Order) split-plot factorial ANOVA was performed for each of the three dependent variables. With regard to the three levels of EVA Message, the present paper only focuses on the difference between no EVA message and presence of EVA message (i.e., EVA 0 vs. EVA 1 and EVA), but not between the two versions of the EVA message (i.e., EVA 1 vs. EVA 2).
For distance to the ambulance when giving way, there was a main effect of EVA Message, F(2, 36) = 6.47, MSE = 4383.58, p = 0.004, = 0.26, such that the two versions of EVA 1 and EVA 2 caused the driver to give way earlier (i.e., at a greater distance before the ambulance caught up), see Figure 1. There was no main effect of neither Interface Order nor Baseline Order. However, there was an interaction effect between EVA Message and Baseline Order, F(2, 36) = 9.13, p = 0.001, = 0.34. As can be seen in Figure 1, in Baseline Order 1 (when EVA 0 was the first condition and EVA 1 and EVA 2 followed) drivers did not give way as early when there was no EVA message, but then gave way much earlier. In Baseline Order 2, however, when EVA 1 and EVA 2 initialized the test and EVA 0 finished it, the drivers gave way about as early regardless of EVA Message, see Figure 1. Separate two-way ANOVAs (EVA Message × Interface Order) for each of the two Baseline Order groups confirmed this interpretation and specified that the main effect of EVA Message was due to the Baseline Order 1 group, F(2, 18) = 11.75, MSE = 5776.00, p = 0.001, = 0.57. The Baseline Order 2 group had F(2, 18) = 0.18, MSE = 2991.15, p = 0.84 (There was no main or interaction effect with regard to Interface Order for either Baseline Order group.).
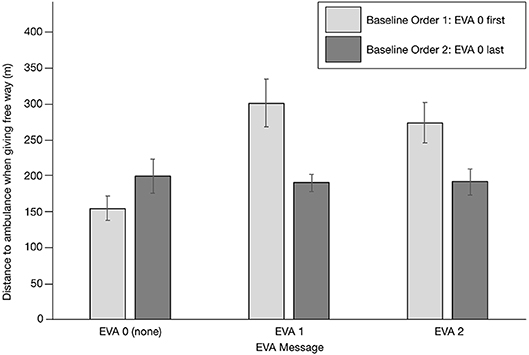
Figure 1. Mean distance (± SE) to ambulance when giving way by exceeding 3 m lateral position from the road center line, by Baseline Order and EVA Message.
For lateral position when the ambulance was alongside the participant and speed when the ambulance was alongside the participant, no effects were found (see Figures 2, 3, respectively).
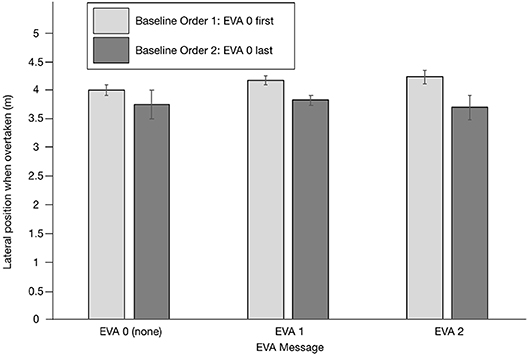
Figure 2. Mean lateral position (± SE) to the right from the road center line when overtaken by the ambulance, by Baseline Order and EVA Message.
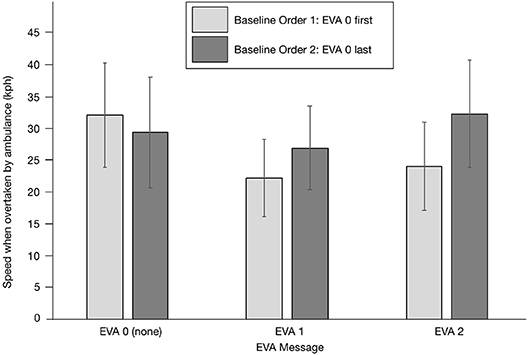
Figure 3. Mean speed (± SE) when overtaken by the ambulance, by Baseline Order and EVA Message.
EVA message had a significant effect on how early the drivers gave way, such that both interface versions made the drivers give way at much greater distances to the ambulance than when there was no EVA message. The results further reflect that since the road side was so wide, the view of the surroundings was so open, and since the traffic was so sparse, it sufficed to give way and proceed at a slightly lower speed. That is, the drivers probably considered that the ambulance could overtake without risk even though they did not stop by the road side. The interaction between EVA Message and Baseline Order reflects that after the EVA message had made them aware that giving way is expected, this behavior was maintained even if there was no EVA message—as long as the approaching emergency vehicle was detected, as it could easily be in this scenario.
The experimental design with EVA Message as a repeated measures variable was necessary to reveal interaction effects such as the one between EVA Message and Baseline Order, but it had the drawback that once the drivers had encountered the ambulance, they were primed such that their behavior might be affected in their next encounter. For example, some drivers might ponder about how they were taught to behave if an ambulance on emergency call closes in on them during their training for their driver's license, and then be better prepared to give way next time. That is, it is possible that the apparent large effect of the EVA message for the Baseline Order 1 group to some extent was a priming effect. Furthermore, driving experience as reflected in how long the drivers had had their driving licenses, their driving frequency and mileage for the recent year, had a large span. It may be expected that abundant driving experience is associated with better knowledge about how to behave when an emergency vehicle on call is approaching.
Experiment 2 was therefore designed to be a stronger test of how well-drivers with relatively little driving experience manage to give way to an emergency vehicle on call, with and without an EVA message broadcast to them, respectively, under a driving condition when the approaching emergency vehicle is difficult to detect early—and without a priming effect that spoils the naïve reaction when the emergency vehicle appears.
The purpose was to test the effect of EVA messaging on the propensity of drivers with relatively little driving experience to give way to an ambulance on an emergency call, when task demands and traffic conditions makes it difficult to detect and identify the approaching ambulance at an early stage.
A total of n = 68 car drivers aged 20–30 years, M = 22.0 years, SD = 1.9 years, whereof 44 males and 24 females, participated. They were required to have a valid driver's license (Swedish category B) and had had them for 0–10 years, M = 3,5 years, SD = 2,1 years. Their self-rated mileage for the recent twelve months was 0–25,00 km, M = 3705.1 km, SD = 5574.2 km, and their self-rated driving frequency for the recent year was between more seldom than once a month and daily (1–5, see Appendix), M = 2.4, SD = 0.92. The participants were recruited via e-mail lists to undergraduate courses at Linköping University, and rewarded with a cinema ticket each for their participation. The experiment group which received an EVA message consisted of n = 35 participants, whilst the control group which received no EVA message had n = 33.
The car simulator setup was the same as in Experiment 1, except for the monitor setup. In addition to the 43-inch front monitor, two 55-inch monitors were used to extent the field of view. They were placed at 45° angle from the front monitor at each side, resulting in about 180° field of view horizontally. The view included an inner rear-view mirror (as in Experiment 1) and side rear-view mirrors.
The driving scenario differed considerably as compared to Experiment 1. The roadside was relatively much narrower, 0.75 m, but there were parking pockets 80 m long and 3 m wide about 1,000 m apart. The road was also quite a lot more hilly and curvy, and there was vegetation as close as 1.75 m to the edges of the roadsides. Therefore, the ambulance closing in from behind could not be seen closer than a small fraction of the farthest possible spotting distance in Experiment 1. Further, one car and one delivery van closed in on the own car before the ambulance appeared, making it even more difficult to spot the ambulance by vision alone. Furthermore, sounds from the environment outside the car, including the sirens of the approaching ambulance, were attenuated to mimic that the own car was soundproof as if it were a modern-day premium car. The background noise plus sound from the simulated driving at 80 kph was about 68 dBA. To make it even more difficult to hear the ambulance approaching, semi-loud music at about 69 dBA was played on the car stereo (Ministry, 1991), resulting in a combined SPL of about 73 dBA. When the ambulance was alongside the own car, the SPL from the sirens was about 80 dBA. The ambulance approaching from behind was therefore much more difficult to discriminate also by hearing as compared to in Experiment 1.
Meeting cars appeared about every 20 s. At 2,200 m from the start of the scenario, a car appeared 200 m ahead of the participant's car, whilst a car and a delivery van closed in from 180 and 150 m behind, respectively, and kept 25 behind the vehicle in front. The ambulance closed in on the participant's car from 500 m behind and passed the participant at about 3,250 m from the start of the scenario. The car behind gave way when the ambulance was 50 m behind it, whilst the delivery van gave way when the ambulance was 40 m behind it.
The ambulance closed in with a speed of 156% compared to the participant's car, with a minimum speed of 100 kph and a maximum speed of 160 kph. During takeover, the ambulance's target lateral position was in the center of the opposite lane.
The EVA message (to the experimental group, but not to the control group) was presented both with sound and in the instrument cluster, 14 s before the ambulance was estimated to pass the participant, based on the relative speed difference. In the audio system of the simulated car (emulating an RDS radio), the music faded and a male voice (at about 68 dBA) said “Varning! Utryckande fordon! Var god ge fri väg.” [Attention! Emergency vehicle approaching! Please give way.]. Simultaneously, in the instrument cluster, a warning sign (i.e., a yellow warning triangle with a blue warning light) and a text message stated "Utryckningsfordon på ingång! Var uppmärksam!” [Emergency vehicle approaching! Pay attention!].
The participant was first informed about the experiment according to the ethical guidelines by Vetenskapsrådet (n.d.) whereupon written informed consent was received. The participant then filled out a questionnaire (see Appendix) regarding their age, sex, and driving experience.
Introduction to the simulator setup followed. Positions of the rear-view mirrors were pointed out, and the participant was told that the transmission was automatic.
The participant was told to drive as in real-life traffic, and to imagine being late to an important meeting but that it was utterly important not to exceed the speed limit since any offense during driving would lead to losing their driving license. In other words, the intention was to motivate the participant to keep to the speed limit as closely as possible. The participant was further told that the car had no cruise control, and that the hilly road therefore demanded active use of the throttle to avoid slowing down uphill, and to avoid speeding downhill. The driving task was thus intended to demand attention to speed keeping as well as to the traffic and surroundings.
To avoid risk of simulator sickness, the participant was told to start by driving no faster than 30 kph and to look straight ahead for the first minute, and then accelerate to the speed limit of 80 kph. The test scenario took about 6 min to complete and was about 4,000 m long. An ambulance under an emergency call, with blue lights and sirens engaged, caught up with and passed the participant's car at about 3,250 m from the start of the scenario (including the 1-min acclimatization to the simulator). The participant was then told to stop after the ambulance had taken over and increased its distance.
The design was between groups. Participants were randomized into either the control group with no EVA message (EVA 0) or into the experimental group with EVA message (EVA 1).
The dependent variables were the same as in Experiment 1: distance to the ambulance when giving way; lateral position when the ambulance was alongside the participant; and speed when the ambulance was alongside the participant.
For each of the three dependent variables, a t-test for independent samples was used to test the effect of the EVA message. As can be seen in Table 1, the EVA message had a significant and large effect on all three measures. That is, the EVA message made drivers give way by moving to the right (in most cases by using a parking pocket), and by doing so also managing to get a lateral position farther to the right when the ambulance passed them. Further, the mean speed when being overtaken by the ambulance was slower.

Table 1. Descriptive statistics for the experimental and control groups, respectively, and inferential statistics for the differences.
Surprisingly, the distribution of drivers who did not give way was significantly heterogeneous by groups, χ2(1, N = 68) = 17.99, p < 0.001. That is, most (i.e., 24/37) participants who did not receive the EVA message (i.e., in EVA 0) did in fact not give way by moving to the right. In fact, most participants in the EVA 0 group said that they did not know whether or not they should give way. Further, eight of them failed to detect the ambulance until it had passed them.
Of those who did receive the EVA message (i.e., in EVA 1), all but four participants gave way (i.e., 31/35), most of whom used the parking pocket. A few of them missed the parking pocket but slowed down and moved far to the right. One of the four who failed to give way said that he did not hear what the audio instruction was.
Table 2 presents additional analyses for speed and lateral position when being passed by the ambulance, for only those participants who fulfilled the criterion to give way by moving more than 3 m to the right from the road center line. As can be seen in Table 2, the results are similar to those in Table 1 such that the effect of the EVA message remains at the same levels.

Table 2. Descriptive statistics for the experimental and control groups, respectively, and inferential statistics for the differences, for only those participants who gave way by moving more than 3 m from the road center.
Since a simple between-groups design was used, there could be no priming effects (i.e., both groups were naïve to the approaching emergency vehicle).
A strong and surprising finding was that the majority of the relatively inexperienced drivers did not know that they are supposed to give way to an emergency vehicle on call, and how to give way properly. This is to our knowledge a novel finding that probably reflects that giving way to emergency vehicles on call is generally not practiced during training for the driving license, and this would probably not be a good idea to try to implement in practice driving in real traffic. However, it would be a good idea to implement giving way to emergency vehicles on call—and other relatively rare traffic events that are critical to handle correctly and efficiently—in driving simulators during training for the driving license (c.f. Lindström and Thorslund, 2020). Grant (2010, 2017) studied drivers' psychological factors involved in their responses to emergency vehicles. Grant (2010) concluded that giving way to emergency vehicles seems to be lacking in driver education, and the present study supports this notion.
Eight participants in the control group that did not receive an EVA message failed to detect the ambulance until it had passed them, compared to no participant in the control group. It is likely that most of these eight did not look in the rear-view mirror, and that they were preoccupied with the driving task and keeping to the speed limit. Probably, they did not notice the sound of the siren because of this. The EVA message thereby was successful in alerting drivers to the ambulance.
Mainly due to the inexperienced drivers' lack of knowledge about how to handle when an emergency vehicle approaches, the EVA message had a significant and strong effect. The results suggest that the EVA message was crucial for making the drivers aware that an emergency vehicle on call was approaching, that they should give way, and how to give way properly.
EVA messaging was necessary for making inexperienced drivers give way to an approaching emergency vehicle on call (Experiment 2), since most of them did not know that they are obliged to give way. Others did not notice the emergency vehicle before it passed them. EVA messaging also made both inexperienced and experienced drivers give way much earlier (Experiment 1). Since drivers vary with regard to experience and attention to the surrounding traffic, the present study suggests that EVA messaging to alert and instruct drivers how to give way properly are beneficial for traffic safety and for enabling time-efficient emergency transports.
In real traffic, road users take notice of other road users' behavior and the traffic norms. This means that effects of EVA messaging may be both stronger and weaker in real traffic, depending on how well the road users identify the emergency vehicle on call and make a coordinated collective effort to provide safe and efficient passage for it (c.f. Alonso et al., 2017). If the traffic norms stipulate collective vigilance for emergency vehicles on call, and early and safe procedures to give way, the effects of EVA messaging should be smaller in comparison to if the traffic norms do not include consideration for emergency vehicles. In the latter case, EVA messaging should have the potential to redeem the norms by educating the road users on how to behave properly.
The theoretically potential benefits of EVA messaging should hypothetically result in measurable, significant and strong effects on how large proportion of road users who give way to an emergency vehicle on call, how early they on average give way, the proportion of road users who act irrationally, and the mean speed of the emergency vehicle. One of the greatest benefits with a simulator study such as this is that the driving scenario can be identical for all participants. One of the greatest drawbacks is that effects on actual traffic could not be studied. This means that the present study allows for strong tests of effects on a single road user at a time, but that the more complex effects in actual traffic (i.e., a greater group of road users) could not be tested. There are two suggestions for further research. Firstly, tests of effects in real-life traffic will require field experiments. Further, the unexpected finding that the majority of novel drivers did not know the rule about giving way to emergency vehicles on call should be followed up by a more extensive survey study in order to establish the proportion of drivers who do not know that they are required to give way and how to properly do so.
The datasets generated for this study are available on request to the corresponding author.
Ethical review and approval was not required for the study on human participants in accordance with the local legislation and institutional requirements. The patients/participants provided their written informed consent to participate in this study.
BL planned, recruited participants, collected, processed and analyzed data, and wrote the manuscript. BT planned both experiments and assisted in all parts of the manuscript. HS helped plan Experiment 2 and wrote the article. DN planned, collected data, and assisted in writing parts of the manuscript pertaining to Experiment 1. JD helped plan and write Experiment 2.
This research was funded by a grant from Vinnova, grant number 2018-01523, awarded to H&E Solutions AB.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Abdelwanis, N. (2014). Characteristics and contributing factors of emergency vehicle crashes (Doctoral thesis), UMI number 3609750, ProQuest LLC, Ann Arbor, MI, United States.
Albertsson, P., and Sundström, A. (2011). Evaluation of insight training of ambulance drivers in Sweden using DART, a new e-learning tool. Traffic Inj. Prev. 12, 621–629. doi: 10.1080/15389588.2011.620660
Alonso, F., Esteban, C., Montoro, L., and Useche, S. A. (2017). Knowledge, perceived effectiveness and qualification of traffic rules, police supervision, sanctions and justice. Cogn. Soc. Sci. 3:1393855. doi: 10.1080/23311886.2017.1393855
Bockting, S. (2007). Verkehrsunfallanalyse bei der Nutzung von Sonder- und Wegerechten gemäß StVO. Hamburg: Berufsgenossenschaft für Gesundheitsdienst und Wohlfahrtspflege.
Buchenscheit, A., Schaub, F., Kargl, F., and Weber, M. (2009). “A VANET-based emergency vehicle warning system,” in 2009 IEEE Vehicular Networking Conference (VNC) (Tokyo), 1–8. doi: 10.1109/VNC.2009.5416384
Burke, C., Salas, E., and Kincaid, J. (2001). Emergency vehicles that become accident statistics: understanding and limiting accidents involving emergency vehicles. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 45, 508–512. doi: 10.1177/154193120104500451
Bylund, P.-O., Björnstig, U., and Larsson, T. J. (1997). Occupational road trauma and permanent medical impairment. Safety Sci. 26, 187–200. doi: 10.1016/S0925-7535(97)00042-8
Catchpole, K., and Mckeown, D. (2007). A framework for the design of ambulance sirens. Ergonomics 50, 1287–1301. doi: 10.1080/00140130701318780
Custalow, C. B., and Gravitz, C. S. (2004). Emergeny medical vehicle collisions and potential for preventive intervention. Prehosp. Emerg. Care 8, 175–184. doi: 10.1080/31270300279X
Drucker, C., Gerberich, S. G., Manser, M. P., Alexander, B. H., Church, T. R., and Becic, E. (2013). Factors associated with civilian drivers involved in crashes with emergency vehicles. Accid. Anal. Prev. 55, 116–123. doi: 10.1016/j.aap.2013.02.035
Gormley, M., Walsh, T., and Fuller, R. (2008). Risks in the driving of emergency service vehicles. J. Psychol. 29, 7–18. doi: 10.1080/03033910.2008.10446270
Grant, P. (2010). An Exploratory Study on the Perspectives of Western Australian Drivers Towards Responding to Emergency Vehicles. Bachelor of Arts report. Available online at: https://ro.ecu.edu.au/theses_hons/1027 (accessed May 11, 2020).
Grant, P. (2017). The human factors associated with responding to emergency vehicles (Doctoral thesis), Edith Cowan University. Available online at: https://ro.ecu.edu.au/theses/2044 (accessed May 11, 2020).
H&E Solutions (2018). EVAM Transmit: A Digitized Version of Warning Lights and Sirens for Your Safety. Retrieved from: https://evam.life/products/ (accessed May 11, 2020).
Hsiao, H., Chang, J., and Simeonov, P. (2018). Preventing emergency vehicle crashes: status and challenges of human factors issues. Hum. Fact. 60, 1048–1072. doi: 10.1177/0018720818786132
Koski, A., and Summanen, H. (2019). The risk factors Finnish paramedics recognize when performing emergency response driving. Accid. Anal. Prev. 125, 40–48. doi: 10.1016/j.aap.2019.01.021
Lenné, M. G., Triggs, T. J., Mulvihill, C. M., Regan, M. A., and Corben, B. F. (2008). Detection of emergency vehicles: driver responses to advance warning in a driving simulator. Hum. Fact. 50, 135–144. doi: 10.1518/001872008X250557
Lindström, A., and Thorslund, B. (2020). “User-centered development of a driving simulator for training of emergency vehicle drivers and development of Emergency Vehicle Approaching messaging: a simulator study,” in Proceedings of 8th Transport Research Arena TRA 2020 (Helsinki).
Lundälv, J., Philipson, C., and Sarre, R. (2010). How do we reduce the risk of deaths and injuries from incidents involving police cars? Police Prac. Res. 11, 437–450. doi: 10.1080/15614263.2010.497333
Ministry (1991). Jesus built my hotrod. On Psalm 69: The Way to Succeed and the Way to Suck Eggs [music album on CD]. Sire Records.
Petzäll, K., Petzäll, J., Jansson, J., and Nordström, G. (2011). Time saved with high speed driving of ambulances. Accid. Anal. Prev. 43, 818–822. doi: 10.1016/j.aap.2010.10.032
Prohn, M. J., and Herbig, B. (2020). Evaluating the effects of a simulator-based training on knowledge, attitudes and driving profiles of German ambulance drivers. Accid. Anal. Prev. 138:105466. doi: 10.1016/j.aap.2020.105466
Saunders, G., and Gough, A. (2003). Emergency ambulances on the public highway linked with inconvenience and potential danger to road users. Emerg. Med. J. 20, 277–280. doi: 10.1136/emj.20.3.277
Savolainen, P. T., Datta, T. K., Ghosh, I., and Gates, T. J. (2010). Effects of dynamically activated emergency vehicle warning sign on driver behavior at urban intersections. Transp. Res. Rec. 2149, 77–83. doi: 10.3141/2149-09
Unterkofler, M., and Schmiedel, R. (1994). Verbesserungder Sicherheit bei Sondersignale insätzen (Bericht zum Forschungsprojekt 8933 der Bundesanstalt für Straßenwesen Bereich Unfallforschung). Bergisch Gladbach: Bundesanstalt für Straßenwesen.
Vägverket (2008). Grundläggande Kompetensmål för Utryckningsförare [Basic Competence Goals for Emergency Drivers]. Borlänge: Vägverket[The Swedish Road Administration].
Vetenskapsrådet (n.d.). Forskningsetiska principer inom humanistisk-samhällsvetenskaplig forskning [Ethical guidelines for research wihin humanistic and social science]. Stockholm: Vetenskapsrådet. Retreived from: http://www.codex.vr.se/texts/HSFR.pdf (accessed May 11, 2020).
Wilbur, M. (1997). Emergency vehicle operations: top ten list. Firehouse, 52. Retrieved from: https://www.firehouse.com/apparatus/article/10544230/top-10-list (accessed May 11, 2020).
Questionnaire: Demographics and driving experience (translated from Swedish)
Age: _____years
Sex: _____
What year did you get your driver's license (Category B)? __________
Do you have a license for any other category? □ No □ Yes, namely: __________
Are you a professional driver? □ No □ Yes
How often have you driven a car during the recent twelve months?
□ □ □ □ □
Daily Most days of the week A few times a week A few times a month Less often
Approximately how far have you driven during the recent twelve months? __________ km
Keywords: emergency driving, warning messages, safety, transport efficiency, risk perception
Citation: Lidestam B, Thorslund B, Selander H, Näsman D and Dahlman J (2020) In-Car Warnings of Emergency Vehicles Approaching: Effects on Car Drivers' Propensity to Give Way. Front. Sustain. Cities 2:19. doi: 10.3389/frsc.2020.00019
Received: 11 March 2020; Accepted: 24 April 2020;
Published: 29 May 2020.
Edited by:
Krzysztof Goniewicz, Military University of Aviation, PolandReviewed by:
Francisco Alonso, University of Valencia, SpainCopyright © 2020 Lidestam, Thorslund, Selander, Näsman and Dahlman. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Björn Lidestam, Ympvcm4ubGlkZXN0YW1AdnRpLnNl
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.