
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
METHODS article
Front. Psychiatry , 11 April 2019
Sec. Public Mental Health
Volume 10 - 2019 | https://doi.org/10.3389/fpsyt.2019.00239
This article is part of the Research Topic Designing Technologies for Youth Mental Health View all 6 articles
 Hirokazu Kumazaki1*
Hirokazu Kumazaki1* Taro Muramatsu2
Taro Muramatsu2 Yuichiro Yoshikawa3,4Yoshio Matsumoto5
Yuichiro Yoshikawa3,4Yoshio Matsumoto5 Hiroshi Ishiguro3,4Masaru Mimura2
Hiroshi Ishiguro3,4Masaru Mimura2 Mitsuru Kikuchi1
Mitsuru Kikuchi1Interventions for job interviews targeting the impaired theory of mind observed in individuals with autism spectrum disorders (ASD) are limited. We developed a role-play-based guidance system for job interviews using an android robot resembling a real person. Individuals with ASD worked in pairs and played dual roles in mock job interviews. Specifically, one participant acted as the interviewee, while the other participant operated the android robot and acted as the interviewer. Eight individuals with high-functioning ASD participated in this study. After the training sessions, participants learned to understand the point of view of the interviewer, which may contribute to increased recognition of the importance of gestures and the motivation to learn how to behave in a job interview. In addition, participants reported improved self-confidence. These results provide preliminary support for the efficacy of playing dual roles using android robots.
Autism spectrum disorders (ASD) are lifelong conditions that impact many aspects of life, including employment outcomes. The low employment rate of individuals with ASD has become a major societal concern worldwide (1). Individuals with ASD have verbal and nonverbal social communication deficits that can interfere with the reciprocity and flow of conversation (2). Nonverbal communications, such as eye contact, facial expressions, and gestures, are assumed to be directly connected to poor performance during job interviews (3, 4). For example, certain nonverbal mistakes (e.g., individuals with ASD not looking at the interviewer in the eye and not making adequate facial expressions) can decrease the chances of receiving a job offer, even if the answers to the interview questions are impressive.
Recently, an advanced project using internet-accessed training and virtual reality has demonstrated that these tools have partial efficacy in improving job interview skills in individuals with ASD. For example, Strickland et al. showed that individuals with ASD who completed the internet-accessed training program had significantly improved verbal communication skills compared to a control group (3). Burke et al. used a Virtual Interactive Training Agent system and showed that individuals with ASD develop the ability to identify strengths, self-promote, self-advocate, and answer situational questions (5). However, these studies did not show improvements in nonverbal communication.
In the job interview setting, nonverbal communication is at least as important as verbal communication is. According to a previous study, 55% of the first impressions are based on nonverbal communication, and only 7% of the first impressions are based on the actual verbal content of the interview (6). Thus, novel interventions for improving nonverbal communication skills are needed.
Unfortunately, as previously reported, improving nonverbal communication skills is more difficult than improving verbal communication skills (3). Challenges in this area are believed to occur because individuals with ASD are impaired in their ability to recognize other’s perspectives (7); that is, they lack what has been labeled the theory of mind (ToM) (8). Therefore, they are unable to understand the effect of their behavior on others (3), which is associated with their low motivation to acquire nonverbal communication skills (9). In designing an intervention to help individuals with ASD to acquire nonverbal communication skills, it is important to not only teach the appropriate nonverbal skills required for such an interaction (e.g., making eye contact and using appropriate facial expressions) but also improve their understanding of the importance of nonverbal communication. However, interventions for job interview preparation derived from a ToM viewpoint are limited (10).
To deepen the understanding of the point of view of interviewers, we developed a role-play-based guidance system for job interviews using an android robot, which is a robot with the appearance and movements resembling those of an actual human. In this system, participants were grouped in pairs and played dual roles using the android robot (i.e., the interviewee in a mock job interview by facing the android robot and the interviewer by operating the android robot). A comparison of the method used in this study and that in a previous study (11) shows that the intervention targets are distinct, because in the present study, the intervention involved learning to understand the point of view of the interviewer, while in the previous study, it involved simple exposure to the android robot-mediated interview procedures.
Greater self-confidence is important in tackling the target situation (12). Recent work has suggested the importance of measuring self-report in individuals with ASD (11, 13, 14). The primary objective of this study was to test whether our role-play-based-guidance system is useful for improving the self-confidence of individuals with ASD in a job interview. Second, we tested whether individuals with ASD show improvement in the recognition of the importance of gestures, motivation, and the extent of understanding the point of view of the interviewers. We hypothesized that after receiving our role-play-based-guidance, participants would demonstrate better self-confidence and show improvement in the recognition of the importance of gestures, motivation, and the extent of understanding the point of view of the interviewers.
All procedures involving human participants were conducted in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki Declaration and its later amendments or comparable ethical standards. The present study was approved by the ethics committee of Kanazawa University. After receiving a complete explanation of the study, all participants and their guardians agreed to participate in the study. All participants provided written informed consent. Inclusion criteria included (1) diagnosis of ASD based on the Diagnostic and Statistical Manual of Mental Disorders, Fifth Edition (DSM-5) from the supervising study psychiatrist (15); (2) aged 19–25 years; and (3) unemployed workers who were actively seeking employment. All participants had known each other for at least 1 year. At the time of enrollment, the diagnoses of all participants were confirmed by a psychiatrist with more than 10 years of experience in ASD using the criteria in the DSM-5 (15) and standardized criteria in the Diagnostic Interview for Social and Communication Disorders (DISCO) (16). The DISCO is reported to have good psychometric properties (17). All participants were diagnosed with Asperger’s syndrome according to the DISCO.
All participants completed the Autism Spectrum Quotient–Japanese version (AQ-J) (18), which was used to evaluate ASD-specific behaviors and symptoms. The AQ-J is a short questionnaire with five subscales (social skills, attention switching, attention to detail, imagination, and communication). Previous studies using the AQ-J have been replicated across cultures (19) and age (20, 21). The AQ is sensitive to the broader autism phenotype (22). Intelligence quotient (IQ) was measured by either the Wechsler Intelligence Scale for Children–Fourth Edition or the Wechsler Adult Intelligence Scale–Third Edition.
Despite treatments such as social skill training and behavioral therapy to improve communication skills and mock job interview training by humans, they could not perform standard nonverbal behaviors required for job interviews (e.g., making eye contact and facial expression). They had failed job interviews more than 10 times. We administered questionnaires pertaining to confidence and avoidance of job interviews, in which items were rated on a 7-point Likert scale half a year before the experiment, and confirmed that all participants had not been confident and had avoided attending job interviews half a year before. The ratings ranged from 1 (not at all comfortable) to 7 (very comfortable). The first author conducted a semistructured interview question, in which participants were asked, “Do you think nonverbal behavior is important in a job interview?” All participants answered that nonverbal behavior is not important in a job interview. They seemed to have a similar level of understanding in that they considered nonverbal behavior to be not important in a job interview.
The android robot used in this study was the Actroid-F (14, 23, 24) (Figure 1) (Kokoro Co. Ltd. Hamura, Tokyo, Japan), which is approximately 165 cm in height and is a female humanoid robot. The face was made of soft silicon rubber by taking a copy of a real human face. It has 12 degrees of freedom in the upper body as follows: eyebrows (up/down, wrinkling); eyelids (open/close); eyeballs (pan, tilt); mouth (open/close, smiling); head (turn, nod, lean); chest (breathing); and waist (bowing). Actroid-F’s face can show a range of simplified expressions, but in a less complex way compared to a real human face. Its artificial body has the same proportions, facial features, hair color, and hairstyle as a human. In this experiment, the Actroid-F was remotely teleoperated by the interviewer (i.e., one of the participants).

Figure 1 Actroid-F (android robot).
On days 1 and 6, the participants participated in a 10-min mock job interview with a human confederate for basic evaluation. Initially, participants were given a document containing recruitment information from which they could select a job including data entry clerk, shelf stacker in a supermarket, custodian, kitchen assistant in a restaurant, nursing assistant, and paper delivery person. After the mock job interviews, we asked participants to complete a questionnaire about their self-confidence in their interview performance. Items were rated on a 7-point Likert scale (ranging from 1 = “not at all comfortable” to 7 = “very comfortable”). We asked participants to complete a questionnaire containing a 5-point Likert scale (1–5) for the question, “How important do you think are gestures in a job interview?” Responses ranged from 1 (I cannot understand the importance of gestures in a job interview at all) to 5 (I understand the importance of gestures in a job interview perfectly). We also asked participants to complete a questionnaire containing a 5-point Likert scale (1–5) for the question, “How motivated are you to learn how to perform in job interviews?” Responses ranged from 1 (I am not motivated to learn how to perform in job interviews at all) to 5 (I am very motivated to learn how to perform in job interviews). In addition, the first author conducted semistructured interviews about “others’ viewpoint.” The participants were asked two questions. First, to assess whether each participant knew that their perspective is different from most people’s perspective, the first author asked, “Do you think your perspective is different from most people’s?” The first author then asked, “Please rate, on a scale from 1 (I cannot understand the point of view of interviewers at all in a job interview setting) to 5 (In a job interview setting, I can understand the point of view of interviewers perfectly), the extent to which you understand the point of view of the interviewers.” After the intervention, the first author asked their teacher, “Did the students learn to understand the point of view of the interviewer after the intervention?”
From days 2 to 5, all eight individuals were grouped in pairs and participated in the mock interviews at the same time. One participant acted as the interviewee in the mock job interview by facing an Actroid-F that was remotely controlled by the other participant, who acted as the interviewer (Figure 2). The other participant (i.e., interviewer) asked questions by selecting from the script (see Supplementary Material), which we prepared in advance. Buttons that corresponded to each script were displayed on the monitor, and the interviewer could ask a question by pushing a button, which was read out loud by the Actroid-F. The interviewer could also replicate facial expressions, such as smile, surprise, or sorrow, by using the button. The interviewer could monitor the expressions made by the Actroid-F and the interlocutor via a video. They practiced 20 min every day (i.e., they practiced each role for approximately 10 min). Considering their interest in operating the android robot, we suggested that playing the role of the interviewer by operating an android robot is useful to learn the point of view of an interviewer in a job interviewer setting. For many individuals with ASD, sensory overstimulation is a serious problem (25), and the flood of social cues may be a primary cause for the inability to process social signals. The burden of getting information from the interlocutor through the monitor is lower than getting information from the interlocutor directly in terms of sensory stimulation. This facilitates information processing even for individuals with ASD and helps in understanding another person’s perspective (24). Controlling their facial expression and conversation freely by typing on a keyboard is easier for them than speaking face to face, which reduces the burden in speaking and contributes to directing their energy toward information processing (24). In addition, for all participants, an unfamiliar person is difficult to approach, so being paired with a familiar person supports a smooth interaction.

Figure 2 The person on the left of the figure played the role of the interviewer by teleoperating the Actroid-F. At the right back of the room is the Actroid-F. The person facing the Actroid-F played the role of the interviewee.
We conducted a brief survey and interview with all participants from this study to evaluate their vocational outcomes at 1-year follow-up with a focus on whether or not they attained a competitive position. The interview included questions about whether the experience of playing dual roles using the android robot was the trigger to put themselves in the position of the interviewer.
All statistical analyses were performed using IBM SPSS Statistics 24.0 (IBM, Armonk, NY, USA). To test the first hypothesis that our role-play-based guidance is useful for improving self-confidence in job interviews, a paired t-test was performed to evaluate the ratings of self-confidence between days 1 and 6. To test the second hypothesis that our role-play-based guidance is useful for improving the recognition of the importance of gestures, motivation, and the extent of understanding the point of view of interviewers, a paired t-test was also performed between days 1 and 6.
In total, eight individuals with ASD took part in the study (see Table 1 for participant details). All participants completed the trial procedures without technological challenges or noted participant distress that would lead to session termination. We carefully observed participant performance and confirmed that all participants were concentrating during the trials and highly motivated from the start to the finish of the experiment.
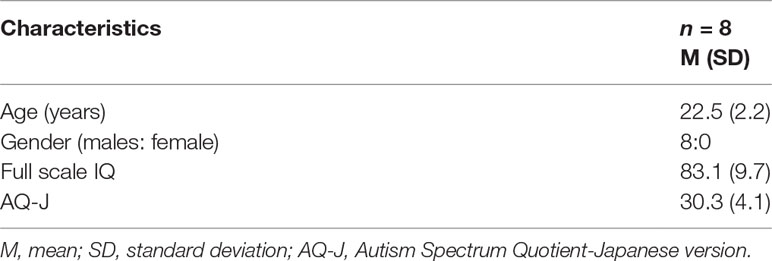
Table 1 Descriptive statistics of participants.
All participants operated with the Actroid-F with enthusiasm evidenced by full participation and comments indicating that they enjoyed the process. When acting as the interviewee, participants seemed to be focused and engaged in the mock job interview. During the intervention, they learned the importance of gestures in job interviews from their experience as the interviewer, and these experiences increased their motivation to learn how to perform in job interviews. There was also a significant increase in the recognition of the importance of gestures in a job interview on day 6 (3.75 ± 0.71) compared to day 1 (1.63 ± 0.74) (p < 0.01) (see Table 2). There was a significant increase in the motivation to learn how to perform in job interviews on day 6 (4.25 ± 0.46) compared to day 1 (2.25 ± 0.71) (p < 0.01) (see Table 2). This motivation led to a positive attitude toward the role of the interviewee in the mock job interview training. These experiences seemed to increase participants’ self-confidence. In fact, there was a significant increase in self-confidence on day 6 (4.50 ± 0.93) compared to day 1 (2.50 ± 1.07) (p < 0.01) (see Table 2). Following the intervention, we confirmed by a semistructured interview that all participants learned to understand the point of view of the interviewer during a job interview. Moreover, in response to the first interview question on day 1, all participants answered, “I understand my perspective is different from most people’s.” On day 6, six of the eight participants answered, “By participating in this study, I truly realized that my perspective is different from most people’s.” The result of the second interview question indicated a significant improvement in understanding the point of view of the interviewer on day 6 (3.38 ± 0.74) compared to day 1 (1.38 ± 0.52) (p < 0.01) (see Table 2). In the semistructured interview, their teachers answered, “All students seemed to learn to understand the point of view of the interviewer.” They started thinking about job interviews positively and restarted their job searches. At the 1-year follow-up after the intervention, five participants had passed job interview examinations and found employment. In our interview 1 year after the intervention, all participants answered, “The experience of role-play-based guidance using the android robot was the trigger to put ourselves in the position of the interviewer.”

Table 2 Descriptive statistics of participants.
In this study, by playing the dual roles using the Actroid-F, the experience of playing the interviewer via the android robot increased participants’ recognition of gestures being a crucial aspect of communication and the importance of knowing how to perform in a job interview. Participants learned to understand the point of view of the interviewer, which may have contributed to the increased recognition of the importance of gestures and the motivation to learn how to behave in a job interview. In general, individuals with ASD have difficulty recognizing that their perspectives differ from those of most people. Therefore, a lack of recognition is indicative of a lack of ToM, which may be the cause of many behaviors associated with ASD, such as inappropriate facial expression and eye contact. Owing to the lack of this insight, individuals with ASD cannot understand the effects of their behaviors on others (2). That is, our system may help alleviate the ToM deficit of individuals with ASD in job interview scenarios.
Placement in pairs of individuals who knew each other also seemed to contribute to their understanding of the perspective of the interviewer. In addition, in this system, acting as the interviewer using the Actroid-F has many advantages compared to conversing face to face. Specifically, when conversing face to face, sensory overstimulation from the human interviewee is a serious problem for individuals with ASD, and it interferes with the processing of social signals (26). Furthermore, the technology behind the Actroid-F might increase the user’s enthusiasm for and concentration on the intervention. In addition, acting as the interviewee by facing the Actroid-F may have the advantage of decreasing interpersonal anxiety and promote intrinsic motivation for the mock job interview. These mechanisms might have enriched the participants’ understanding and led to improvements in their self-confidence.
Young adults with ASD are able to self-report psychiatric symptoms (26). Compared to their caregivers, they may be more accurate reporters of their own mood dysregulation (27). Considering these factors, the results of the self-reporting questionnaire on self-confidence and motivation in this study (participants improved their self-confidence in interview performance and motivation to learn how to perform job interview) are reliable.
In this study, based on semistructured interviews with participants and their teachers, our intervention indicates improved perspective-taking in participants. Considering the usefulness of double scoring by participants and their teachers (26), the results of the semistructured interview are reliable. Furthermore, the participants demonstrating an increased recognition of the importance of gestures and motivation to learn how to behave in a job interview also indicates that participants gained a deeper understanding of taking on the perspective of another, an important component of the ToM.
The experience of playing dual roles using the android robot seems to help participants understand the position of the interviewer. However, it is difficult to conclude that a daily 20-min intervention for 6 days is sufficient to explain the long-term outcome (i.e., five participants had passed a job interview examination and found employment). The existence of confounding variables, such as interventions and education that participants received after the experiment, makes it difficult to establish a clear link between the intervention and the outcome. Future studies controlling for the confounding factors are needed.
This study has several limitations. The first limitation is the relatively small number of participants. Larger sample sizes are necessary to provide more meaningful data to evaluate the efficacy of role-play-based guidance system using an android robot. Second, in addition to the self-reporting and the interviews with the participants, we asked their teacher to confirm whether they had learned to understand the point of view of the interviewer. We also confirmed at the 1-year follow-up after the intervention that five of the eight participants had passed their job interviews and found employment. On the other hand, we did not measure biological markers, which is a limitation of this study. Although young adults with ASD may be accurate reporters of their own mood dysregulation compared to their caregivers (27), future studies measuring not only self-report but also biological markers, such as saliva cortisol, are needed.
In conclusion, as hypothesized, individuals with ASD demonstrated improved recognition of the importance of gestures, motivation, and the extent of understanding the point of view of interviewers. In addition, they demonstrated better self-confidence after receiving our role-play-based guidance using the android robot. While robotic technologies are considered potential vehicles for enhancing nonverbal communication skills in children with ASD, a few studies have been using this strategy to investigate the ability of children with ASD to recognize others’ perspectives. The present study provides preliminary support for a unique application of a robotic system (e.g., role-play based guidance system using android robot) to overcome a component (e.g., job interviewing) of a very specific challenge (e.g., employment) that many individuals with ASD struggle with over time. The system used in this study is not personalized according to their needs. To personalize this system according to individuals’ different needs, future developments of the system to adjust the intelligibility of nonverbal behaviors for android robot depending on the situation are needed.
All procedures involving human participants were conducted in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki Declaration and its later amendments or comparable ethical standards. After an explanation of the study was provided, all participants’ guardians provided written, informed consent.
HK designed the study, conducted the experiment, carried out the statistical analyses, analyzed and interpreted data, and drafted the manuscript. TM, YY, YM, HI, MM, and MK conceived of the study and participated in its design and assisted with data collection and scoring of behavioral measures and analyzed and interpreted the data and were involved in drafting the manuscript and revised it critically for important intellectual content. MK was involved in approving the final version to be published. All authors read and approved the final manuscript.
This work was supported in part by Grants-in-Aid for Scientific Research from the Japan Society for the Promotion of Science (17H05857), ERATO ISHIGURO Symbiotic Human-Robot Interaction Project, and was partially supported by The Center of Innovation Program from the Japan Science and Technology Agency, JST, Japan.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
We sincerely thank the participants and all the families who participated in this study.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fpsyt.2019.00239/full#supplementary-material
1. Volkmar FR, State M, Klin A. Autism and autism spectrum disorders: diagnostic issues for the coming decade. J Child Psychol Psychiatry (2009) 50:108–15. doi: 10.1111/j.1469-7610.2008.02010.x
2. Morgan L, Leatzow A, Clark S, Siller M. Interview skills for adults with autism spectrum disorder: a pilot randomized controlled trial. J Autism Dev Disord (2014) 44:2290–300. doi: 10.1007/s10803-014-2100-3
3. Strickland DC, Coles CD, Southern LB. JobTIPS: a transition to employment program for individuals with autism spectrum disorders. J Autism Dev Disord (2013) 43:2472–83. doi: 10.1007/s10803-013-1800-4
4. Kandalaft MR, Didehbani N, Krawczyk DC, Allen TT, Chapman SB. Virtual reality social cognition training for young adults with high-functioning autism. J Autism Dev Disord (2012) 43:34–44. doi: 10.1007/s10803-012-1544-6
5. Burke SL, Bresnahan T, Li T, Epnere, Rizzo, Partin, et al. Using virtual interactive training agents (ViTA) with adults with autism and other developmental disabilities. J Autism Dev Disord (2018) 48:905–12. doi: 10.1007/s10803-017-3374-z
6. Albert M. Silent messages: implicit communication of emotions and attitudes. Belmont: Wadsworth Pub. Co. (1971).
7. Baron-Cohen S, Tager-Fulsberg H, Cohen DJ. Understanding other minds: perspectives from developmental cognitive neuroscience. Oxford: Oxford University Press (2000).
8. Baron-Cohen S, Leslie AM, Frith U. Does the autistic child have a “theory of mind”? Cognition (1985) 21:37–46. doi: 10.1016/0010-0277(85)90022-8
9. Chevallier C, Kohls G, Troiani V, Brodkin ES, Schultze RT. The social motivation theory of autism. Trends Cogn Sci (2012) 16:231–9. doi: 10.1016/j.tics.2012.02.007
10. Begeer S, Howlin P, Hoddenbach E, Clauser C, Lindauer R, Clifford P, et al. Effects and moderators of a short theory of mind intervention for children with autism spectrum disorder: a randomized controlled trial. Autism Res (2015) 8:738–48. doi: 10.1002/aur.1489
11. Kumazaki H, Warren Z, Corbett BA, Yoshikawa Y, Matsumoto Y, Higashida H, et al. Android robot-mediated mock job interview sessions for young adults with autism spectrum disorder: a pilot study. Front Psychiatry (2017) 8:169. doi: 10.3389/fpsyt.2017.00169
12. Maskey M, Lowry J, Rodgers J, McConachie H, Parr JR. Reducing specific phobia/fear in young people with autism spectrum disorders (ASDs) through a virtual reality environment intervention. PLoS One (2014) 9:e100374. doi: 10.1371/journal.pone.0100374
13. Mikita N, Hollocks MJ, Papadopoulos AS, Aslani A, Harrison S, Leibenluft E, et al. Irritability in boys with autism spectrum disorders: an investigation of physiological reactivity. J Child Psychol Psychiatry (2015) 56:1118–26. doi: 10.1111/jcpp.12382
14. Simon DM, Corbett BA. Examining associations between anxiety and cortisol in high functioning male children with autism. J Neurodev Disord (2013) 5:32. doi: 10.1186/1866-1955-5-32
15. American Psychiatric Association (APA). Diagnostic and statistical manual of mental disorders. 5th ed. Arlington, VA: American Psychiatric Publishing (2013) p. 5–25.
16. Leekam SR, Libby SJ, Wing L, Gould J, Taylor C. The diagnostic interview for social and communication disorders: algorithms for ICD-10 childhood autism and wing and gould autistic spectrum disorder. J Child Psychol Psychiatry (2002) 43:327–42. doi: 10.1111/1469-7610.00024
17. Wing L, Leekam SR, Libby SJ, Gould J, Larcombe M. The diagnostic interview for social and communication disorders: background, inter-rater reliability and clinical use. J Child Psychol Psychiatry (2002) 43:307–25. doi: 10.1111/1469-7610.00023
18. Wakabayashi A, Tojo Y, Baron-Cohen S, Wheelwright S. [The Autism-Spectrum Quotient (AQ) Japanese version: evidence from high-functioning clinical group and normal adults]. Shinrigaku Kenkyu (2004) 75:78–84. doi: 10.4992/jjpsy.75.78
19. Wakabayashi A, Baron-Cohen S, Uchiyama T, Yoshida Y, Tojo Y, Kuroda M, et al. The autism-spectrum quotient (AQ) children’s version in Japan: a cross-cultural comparison. J Autism Dev Disord (2007) 37:491–500. doi: 10.1007/s10803-006-0181-3
20. Auyeung B, Baron-Cohen S, Wheelwright S, Allison C. The Autism Spectrum Quotient: Children’s Version (AQ-Child). J Autism Dev Disord (2008) 38:1230–40. doi: 10.1007/s10803-007-0504-z
21. Baron-Cohen S, Hoekstra RA, Knickmeyer R, Wheelwright S. The Autism-Spectrum Quotient (AQ)—adolescent version. J Autism Dev Disord (2006) 36:343–50. doi: 10.1007/s10803-006-0073-6
22. Wheelwright S, Auyeung B, Allison C, Baron-Cohen S. Defining the broader, medium and narrow autism phenotype among parents using the Autism Spectrum Quotient (AQ). Mol Autism (2010) 1:10. doi: 10.1186/2040-2392-1-10
23. Yoshikawa M, Matsumoto Y, Sumitani M, Ishiguro H. Development of an android robot for psychological support in medical and welfare fields. 2011 IEEE International Conference on Robotics and Biomimetics, Phuket, Thailand. (2011) 2378–83. doi: 10.1109/robio.2011.6181654
24. Johnson CP, Myers SM. American Academy of Pediatrics Council on Children With D. Identification and evaluation of children with autism spectrum disorders. Pediatrics (2007) 120:1183–215. doi: 10.1542/peds.2007-2361
25. Kumazaki H, Muramatsu T, Yoshikawa Y, Matsumoto Y, Miyao M, Ishiguro H, et al. Tele-operating an android robot to promote the understanding of facial expressions and to increase facial expressivity in individuals with autism spectrum disorder. Am J Psychiatry (2017) 174:904–5. doi: 10.1176/appi.ajp.2017.17030257
26. Hurtig T, Kuusikko S, Mattila M-L, Haapsamo H, Ebeling H, Jussila K, et al. Multi-informant reports of psychiatric symptoms among high-functioning adolescents with Asperger syndrome or autism. Autism (2009) 13:583–98. doi: 10.1177/1362361309335719
Keywords: autism spectrum disorders, android robot, job interview, role-play, self-confidence
Citation: Kumazaki H, Muramatsu T, Yoshikawa Y, Matsumoto Y, Ishiguro H, Mimura M and Kikuchi M (2019) Role-Play-Based Guidance for Job Interviews Using an Android Robot for Individuals With Autism Spectrum Disorders. Front. Psychiatry 10:239. doi: 10.3389/fpsyt.2019.00239
Received: 27 December 2018; Accepted: 29 March 2019;
Published: 11 April 2019.
Edited by:
Nilufar Baghaei, Otago Polytechnic Auckland, New ZealandReviewed by:
Farhad Mehdipour, Otago Polytechnic, New ZealandCopyright © 2019 Kumazaki, Muramatsu, Yoshikawa, Matsumoto, Ishiguro, Mimura and Kikuchi. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Hirokazu Kumazaki, a3VtYXpha2lAdGlhcmEub2NuLm5lLmpw
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.