Introduction: Biohybrid robotic device development is a growing field of research. Using muscle cells and synthetic polymers which are micropatterned to induce cellular alignment, researchers have developed devices capable of locomotion[1],[2]. Such devices rely on inorganic substrates requiring additional processing steps. In this study, we report the first skeletal muscle powered organic biohybrid device that is constructed using patterned deposition of collagen by electrocompaction which promotes cellular alignment and adhesion innately[3].
Methods: Organic scaffolds were fabricated using telo-collagen diluted to 3 mg/ml and dialyzed against ultra-pure water at C for 24 hours. ELAC scaffolds were then produced using the techniques previously reported by Webster et al.[4]. Briefly, collagen was introduced to a mold between two electrodes and compacted into a sheet, which takes on a 3D configuration when seeded with cells (Fig. 1). Peeling during device removal from the cathode aligns the device’s legs. Scaffolds were crosslinked for 15 minutes in 80% ethanol containing EDC and NHS at a ratio of 1:100:250 (collagen:EDC:NHS) and sterilized in 70% ethanol before seeding. For this study, four and six leg scaffolds were fabricated (N=6).
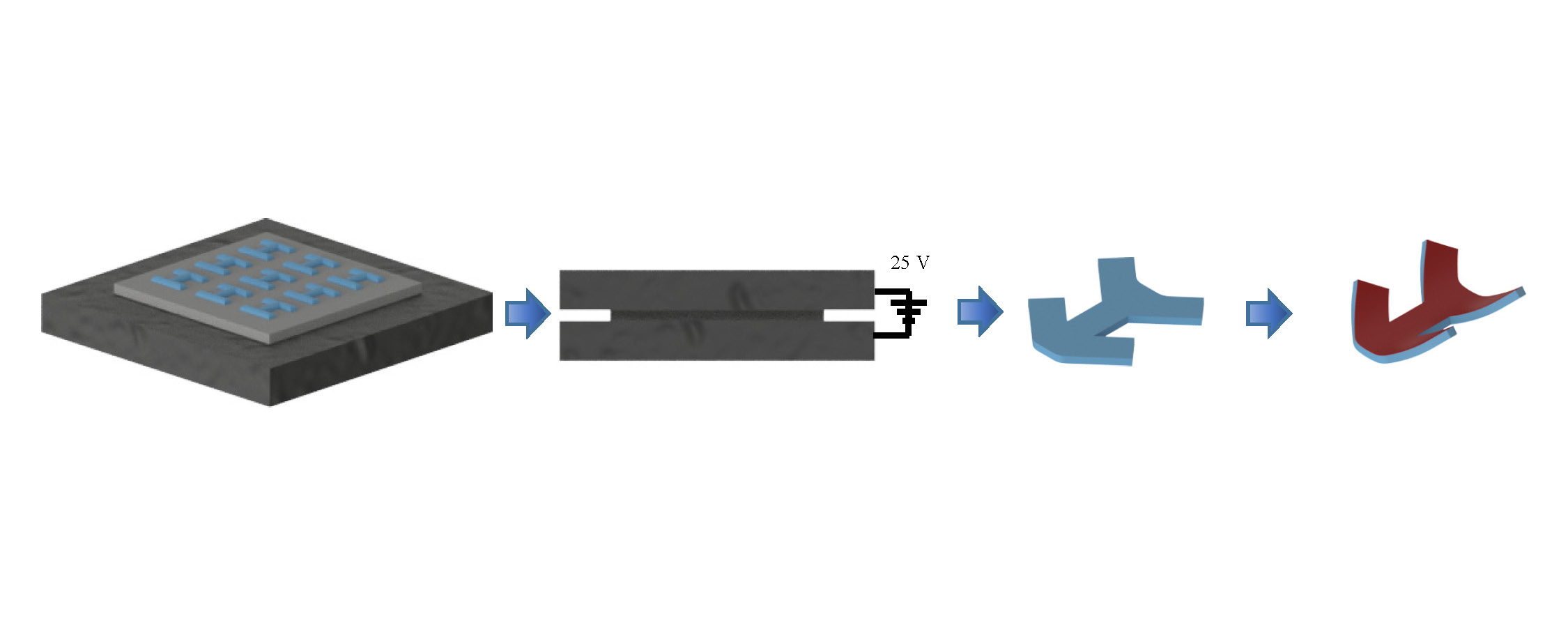
Figure 1. ELAC scaffold fabrication. Collagen is introduced to a mold and placed between two electrodes. The collagen is electrically compacted into a sheet in the shape of the mold and devices are removed from the cathode via peeling. Peeling the devices stretches and angles the legs. When cells are seeded onto the devices, the scaffolds take on a 3D conformation under the passive cell tension.
Skeletal muscle cells were isolated from the thigh of day 13 chick embryos, mechanically dissociated, and pre-plated for 45 minutes to reduce fibroblast contamination. Cells were seeded on scaffolds at a density of and cultured for 4 days at C and then stimulated with 15V at a frequency of 1 Hz with a 10% duty cycle.
Results: The fabrication methods described yielded scaffolds with collagen alignment along the leg and body axes of the device (Fig. 2). The alignment induces myotubule formation along the axes.
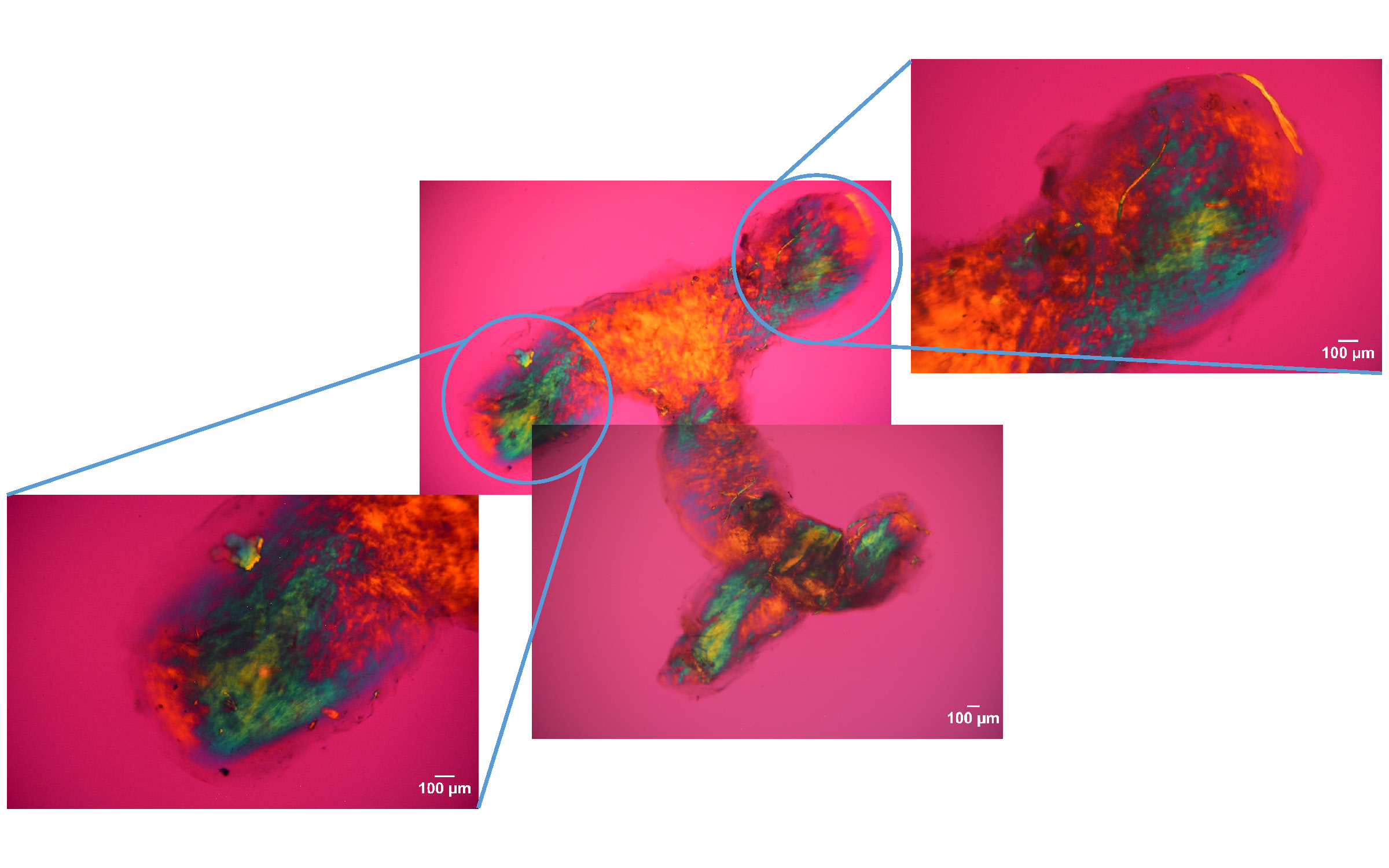
Figure 2. Polarized light microscopy of the ELAC device scaffolds shows alignment along the axes of the legs. The alignment direction is revealed by the blue coloration along the legs.
Devices are capable of locomotion upon cellular contraction when electrically paced. Four-legged devices had an average velocity of 77.6 ± 78.8 µm/s with a maximum speed of 233.6 µm/s. Six-legged devices had an average velocity of 39.1 ± 23.3 µm/s and a maximum speed of 61.3 µm/s (Fig 3.). A Kruskal-Wallis test found no statistically significant difference in the velocity of the four and six legged devices. The six-legged devices resulted in a lower standard deviation; however, the difference was not significant.
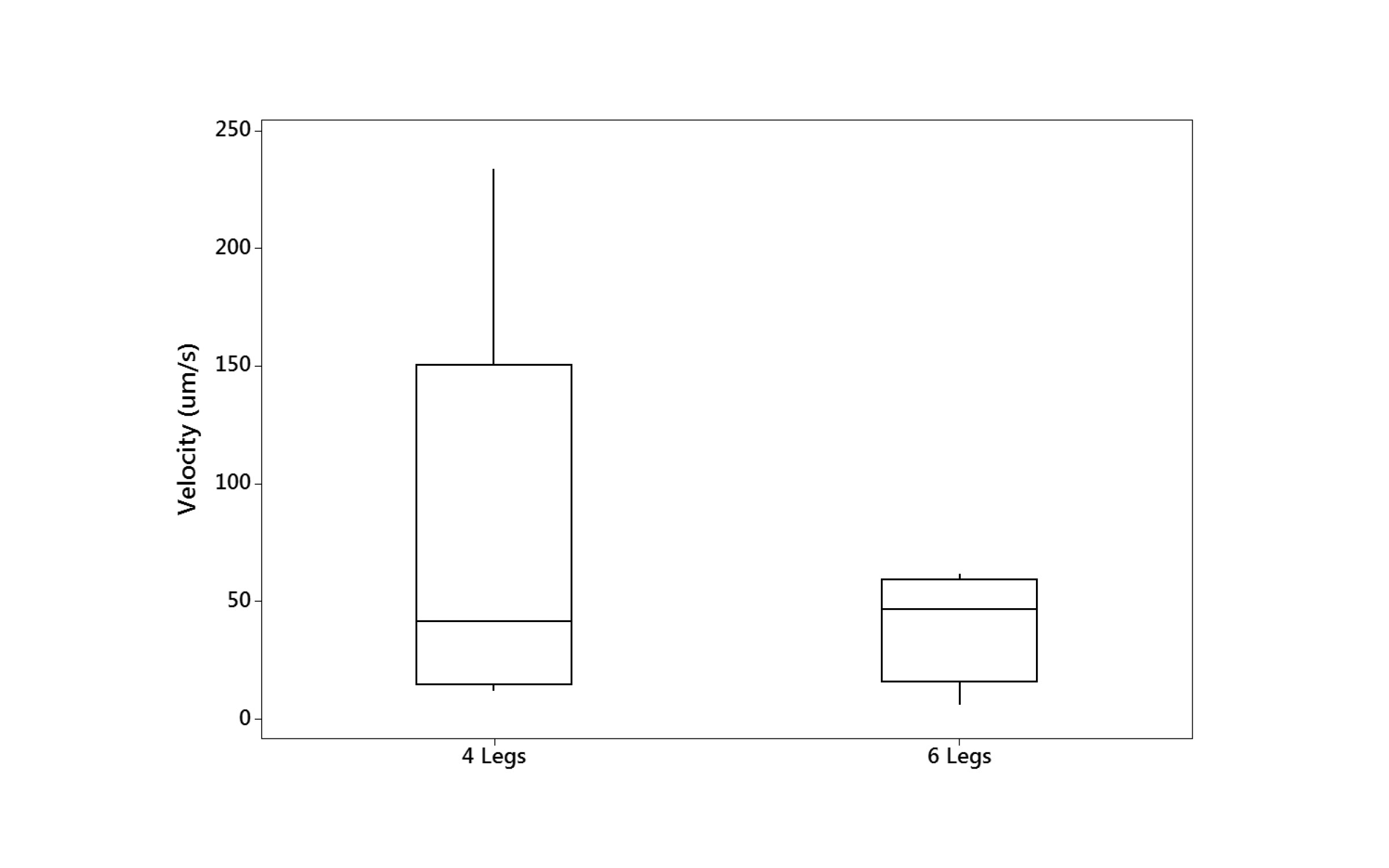
Figure 3. A comparison of the velocities for the four and six legged devices.
Discussion: The alignment of the collagen scaffold during fabrication allows the devices to self-assemble in a coordinated fashion. Passive cell stresses cause the legs to bend towards the seeded surface, resulting in a 3D configuration. Additionally, myotubule alignment results in contraction forces working together to bend the legs. Besides soft robots, the proposed pure collagen based device may have applications in cardiac/muscle repair or implantable biodegradable pumps.
This material is based upon work supported by the National Science Foundation Graduate Research Fellowship under Grant No. DGE-0951783. This study was also funded in part by grants from the National Science Foundation (Grant Number DMR-1306665) and National Institute of Health (Grant Number R01 AR063701). Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation.
References:
[1] J.C. Nawroth et al. Nat. Biotechnol. 30(8). pp. 792-7. Aug. 2012.
[2] C. Cvetkovic et al. PNAS, 111(28), pp. 10125–30, Jun. 2014.
[3] X. Cheng et al. Biomaterials. 29(22). pp 3278-88. Aug. 2008.
[4] V.A. Webster et al. Living Machines 2015. pp 429-40. July 2015.